THE DEVELOPMENT AND USE OP A SPEED VS. DISTANCE GRAPH TIME CALCULATOR THE INTERPRETATION OP LOCOMOTIVE PERFORMANCE
|
|
|
- Grant Burke
- 6 years ago
- Views:
Transcription
1 THE DEVELOPMENT AND USE OP A SPEED VS. DISTANCE GRAPH TIME CALCULATOR THE INTERPRETATION OP LOCOMOTIVE PERFORMANCE A Thesis Submitted in Partial Fulillment o the Requirements or the Degree o MECHANICAL ENGINEER By Carlton Shepard Hulbert B. S. in 1. E Georgia School o Technology June 1, 1941
2 Sub-GQUBtitt o Gomaitte on Miraaeed Degrees
3 I DEVELOPME&T A. FEED OF PRIME INTEREST TO RAILROAD MEM IS THE MATTER OF TRAIN SCHEDULES AND SPEEDS, WHICH IS OFTEN REFLECTED DIRECTLY BY PUBLIC OPINION AND THEREFORE EARNING ABILITY. WITH THE ADVENT OF SUCCESSFUL COMPETITION TRAIN SCHEDULES WERE SHORTENED AND CONSEQUENTLY TRAIN SPEEDS WERE INCREASED. AS A RESULT, MORE ATTENTION IS BEING GIVEN TO SCHEDULES AND TO KEEPING TRAINS OM.SCHEDULE UNDER ALL OPERATING CONDITIONS.. AS A MEANS OF STUDYING ACTUAL TRAIM OPERATION WITHOUT HAVING TO RIDE EACH TRAIM, LOCOMOTIVE SPEED 3 RECORDER TAPES WERE MADE AVAILABLE. THESE TAPES ARE ESSENTIALLY SPEED VS. DISTANCE GRAPHS PLOTTING SPEED IN MILES PER HOUR AGAINST MILES TRAVELED. IT IS THEREFORE POSSIBLE TO DETERMINE THE ACTUAL SPEED OF ANY TRAIN, SO EQUIPPED AT ANY LOCATION, AND THE TAPE.REPRESENTS AS AUTOGRAPH.OF A TRAIM 1 A PERFORMANCE. SINCE THESE TAPES RECORD THE SPEED DIRECTLY -IN MILES PER HOUR, AND AS THIS SPEED IS FLUCTUATING A GREATER PART OF THE TIME, ANY APPROXIMATION OF THE TIME INVOLVED IS BOUND TO BE CRUDE* BECAUSE TIME IS ACTUALLY THE VALUE DESIRED, AND THE SPEED ONLY THAT REQUIRED TO MAKE m SPECIFIC SCHEDULE, -AH PROBLEM OF.CONVERTING THESE TAPES INTO TIME PRESENTED ITSELF.
4 It is true that complete studies are possible which will orecast a schedule or a particular rum with equipment o known characteristics} but here was presented almost the reverse perormance charted complete except or the time value. B. Description o the locomotive Speed Reeorder.- Although steam locomotives are over 10 years old* generally speaking automobiles have carried speedometers longer than have locomotives, he locomotive ran upon its own right o way and because enginemen carried certiied accurate time pieces and because railroad operation and saety depended upon these timepieces, the speed at which the locomotive was operated was determined "by the watch and the *mlle posts* 1 along the right o way* 'Time per mile 1 1 it is called, and it is still used to check speed by many railroadmen, including enginemen. However, speedometers appeared on locomotives and where they have been used or a suicient time, the enginemen have come to rely on them or their speed indication, rather than! t time per mile 1 5. One o the modern types o speed recorders is mechanically operated by a Hip diameter tt rictiom wheel 1 1 held in contact with the tread o the tire o the right back locomotive driving wheel. This riction wheel drives a centriugal type governor, spring loaded, through a lexible drive
5 shat made o one inch links, enclosed in a lubricated conduit* At a locomotive speed o 60 miles per hour. this, lexible shat turns 400 R.P.M. and indicates 60 SEPH on a suitable dial acing the engineman. This same mechanism moves a 2^N wide paper tape at the rate o one inch per two miles, while a pencil which is interlocked with the speed hand on the dial plats the speed on this moving tape* Tape is supplied in rolls up to 2400 miles In length and the used portion Is usually removed at each locomotive terminal and orwarded to a central point or examination, study and iling* A riction wheel drive or the speedometer is used instead o am axle drive or two reasons. 1-1* Sine or wear o the locomotive driving wheel tire does, mot aect the accuracy o the speed indication* 2* Attachment o the device to a driving axle is complicated by the act that crank pirns and rods are present and although the device may be located on any wheel which is in contact with the rail, a driving wheel is chosen so that any slipping o the locomotive drivers may be noted by the engimemem and recorded on the tape* he device is so geared that it will indicate and record back up movements as well as orward movements. This type o speedometer Is made in our speed ranges:- 60 MPH Instrument 0-60 MPH 90 MPH Instrument MPH 100 MPH Instrument MPH 120 MPH Instrument MPH
6 This study is based on the 90 MPH Instrument but it is equally applicable to the 100 and 120 MPH Instruments. Diiculties are to be met when the speed is below 10 MPH due to Inaccuracy o the speedometer itsel in this speed range, short length o time and distance operated at less than 10 MPH and the detail and dimensions o the calculator developed. The 90, 100 and 120 MPH Instruments are similar and may be considered the same or the purpose o this paper. The only change necessary is in the cam, which will be taken up later. <3# Statement o Principles. Since such a graph as is produced on this tape is known as a speed vs. distance graph, there are certain known mathematical values, thuss- The area under the curve, FIOTBI 1, Page 5, is measured as a product o speed (MPH) and distance (Miles) which equals miles squared per hour, a meaningless unit. (See lote. 1.) I, however, this graph Is replotted using the reeiproeal o the speed vs. distance to the same scale in miles.'** The area under the curve, FIGURE 2, Page 5, is measured as a product o reciprocal speed (hours per mile) and distance (miles) which equals hours, a simple unit o time. (See lote 2.) lote 1. Technical Mechanics,Maurer & Roark, Page 140. lote 2. Technical Me chani c s,maurer & Roark, Page 141.
7 1710 S00 or ID a. w 0 3 O X 1/ a UJ UJ CL CO o o 1/30,033 h~ g; 1/ g tsc 1/50 /.020 / is m 1/ / K h DISTANCE - MILES FIG DISTANCE - MILES FIG. I TYPICAL SPEED VS. DISTANCE GRAPH AND CORRESPONDING RECIPROCAL-SPEED VS. DISTANCE GRAPH LOCOMOTIVE SPEED RECORDER
8 I t i s t h e r e o r e o b v i o u s t h a t u s i n g a p r o p e r p l a n i m e t e r a m d r e e i p r o e a l r u l e d c h a r t p a p e r u p o n w h i c h t h e t a p e c h a r t c o u l d b e r e p l o t t e d, t h e e l a p s e d t i m e c o u l d b e d e t e r m i n e d b e t w e e n a n y t w o p o i n t s o n t h e t a p e. A m y r e p l o t t i m g o c u r v e s, h o w e v e r, I n v o l v e s c o n s i d e r a b l e l a b o r, a n d i s. s u b j e c t t o e r r o r, a n d i t h e t a p e - i n o r m a t i o n i s t o b e r e a d i l y a v a i l a b l e i t s h o u l d b e o b t a i n e d r o m a w i d e b a s i s o a c t u a l t a p e s, t h e r e o r e, a s h o r t a n d - r e l a t i v e l y s i m p l e p r o c e d u r e i s n e c e s s a r y i m a x i m u m u s e i s t o b e m a d e o t h e s p e e d r e c o r d e r t a p e s. D. S o l u t i o n. I t w a s t h e r e o r e d e c i d e d t o c o n s t r u c t a m a c h i n e w h i c h w o u l d p l o t a r e e i p r o e a l s p e e d v s. d i s t a n c e g r a p h r o m a s p e e d v s. d i s t a n c e g r a p h ; - s o t h a t t h e r e c i p r o c a l s p e e d c u r v e w o u l d b e a c o n t i n u o u s l i n e i n s t e a d o a s e r i e s o p o i n t s. A s t u d y o t h e a c t u a l s p e e d v s. d i s t a n c e g r a p h s, a n d t h e r e c i p r o c a l r u l e d c h a r t p a p e r b r o u g h t u p s e v e r a l c o n d i t i o n s w h i c h I t w a s n e c e s s a r y t o s a t i s y b e o r e t h e m a c h i n e c o u l d b e b u i l t. 1. T h e v e r t i c a l d i m e n s i o n s o t h e M P H t a p e w e r e n o t e q u a l l y s p a c e d. 2. T h e v e r t i c a l d i m e n s i o n s o n t h e r e c i p r o c a l r u l e d c h a r t p a p e r v a r i e d g r e a t l y. 3. A c a m c u t t o s u i t t h e s e r e q u i r e m e n t s h a d t o p e r m i t a r a t i o o m o v e m e n t b e t w e e n M P H s p e e d, o r
9 instance, and a 1 : 1 ratio o movement-between 7 -s9 MPH speed* 4* The 90 MPH tape measured two incites between 10 and 90 MPH, while the reciprocal ruled chart paper measured 15*86 between 10 ami 90 IPH. Many cams were tried but the great dierence' in ratio o movement made them sel-locking at certain speeds* Finally one method was ound where the cam ollower was attached ta*a orosahead sliding in straight line guides and the cam rotated about one end which was pivoted. Through suitable linkage the motion was transmitted so that when the machine was operated by the handwheels Im such a way that the ollower"was kept on the speed vs. distance graph chart line, the pencil plotted on a sheet o paper the exact corresponding reciprocal-speed vs. distance graph* The area under this graph could then he determined with a plamimeter and by using a suitable constant, the elapsed time could be obtained im minutes* The irst cam was cut to handle the 90 MPH speed recorder tapes, and later a second cam was cut or the 120 MPH tapes* It would bte possible to cut a cam to handle any speed recorder tape under 2^n im width with the present machine, and with a slight change in construction, is much wider as is practical to use in this type o recording instrument
10 This method, although it did away with replotting the curve by hand, still made it necessary to make two rums irst over the actual speed vs. distance graph, and second, plamlmeterlng the area under the newly drawn curve. The tracer arm o the planlmeter was then attached to the plotting arm, and instead 1 o replettimg the curve, the planlmeter ollowed the reciprocal speed curve accurately, and with proper manipulation, the area under the reciprocal curve was measured simply by ollowing the original speed vs. distance graph. The area uhder the reciprocal speed vs. distance graph is obtained in square inches, which represents time in minutes, using the proper constant. This constant depends upomt- 1 - Units chosen or the abscissa and ordinate o the reciprocal speed vs. distance graph. 2. Constant o the planlmeter. 5. Minutes per hour equals The unit chosen or the abscissa is the mile which measures inches and ooineldee with the distance scale o the speed vs. distance graph* The unit chosen or the ordinate depends upon the dimension o the reciprocal ruled chart paper, in this Instance, 14 inches, which makes one unit equal 140 inches. The constant o the planlmeter in this case is * 3 ; that is, the reading o the planlmeter Is multiplied by 0. 3 to get square inches.
11 l n l c i n T h e c o n s t a n t o t h e m a c h i n e i s t h e r e o r e s - e s 0 # Q 5 x * i r r ^ * r ~ h a t i s, t h e t i m e i n m i n u t e s b e t w e e n a n y t w o p o i n t s e q u a l s t h e p l a n i m e t e r r e a d i n g x , w h e n 1 4 r u l e d c h a r t p a p e r i s u s e d * r e c i p I a 7 r e c i p r o c a l r u l e d c h a r t p a p e r i s u s e d, t h i s c o n s t a n t b e c o m e s s - I a 0 5 = * x 6 0 s 0 * ' 7 0 x 0 * 5 " r e c i p r o c a l r u l e d c h a r t p a p e r i s u s e d, t h i s c o n s t a n t b e c o m e s s - 0 * 0 * 0 3 x 6 0 m 0 * x 0 * 5 T h e p l a n i m e t e r u s e d i s a r u l e p l a n i m e t e r c a p a b l e o m e a s u r i n g a n a r e a w i t h i n a r e c t a n g l e, t h e m a x i m u m d i m e n s i o n s o w h i c h a r e ' 1 6 * x 6 * A p o l a r p l a n i m e t e r c o u l d b e u s e d t o m e a s u r e t h e a r e a u n d e r t h e r e c i p r o c a l s p e e d v s * d i s t a n c e g r a p h, b u t t h e d i s t a n c e m e a s u r e d o r e a c h s e t u p o t h e p l a n i m e t e r w o u l d n e c e s s a r i l y b e l i m i t e d b y t h e l e n g t h o t h e m e a s u r i n g a r m * S i n c e t h e r u l e p l a n i m e t e r a l l o w s m e a s u r e m e n t s t o b e m a d e u p t o 6 0 i n l e n g t h, ( e q u i v a l e n t t o m i l e s o n t h e s p e e d v s * d i s t a n c e g r a p h ), i t w a s d e c i d e d t o m a k e u s e o t h i s i n s t r u m e n t * T h e m e a s u r i n g r o l l e r o t h i s p a r t i c u l a r p l a n i m e t e r r o l l s o n a s p e c i a l s u r a e o o n a s t e e l t r a c k s o t h a t t h e c o n s t a n c y o s u r a c e i s n o t i n t e r e r e d w i t h *
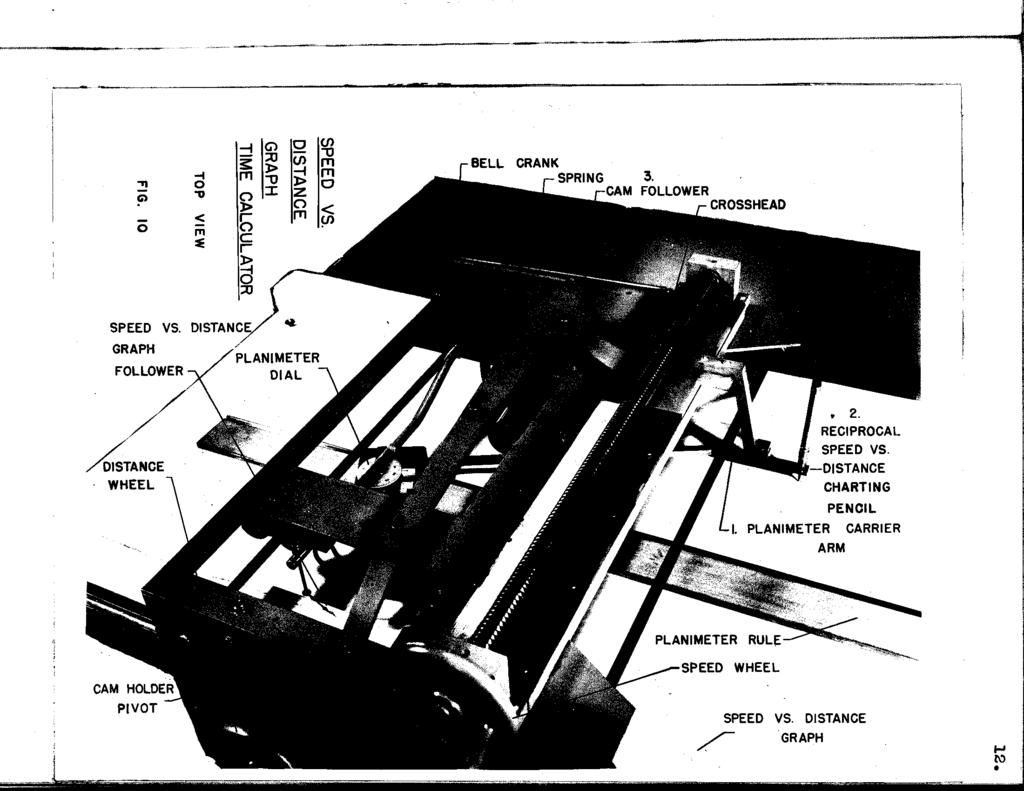
12 1# Description o Machine Pictures* FIGURE 9 & 10* gs.11,12. The machine chassis is made o steel* moving along a 72" track on ball bearing sheave wheels controlled through a "distance" hand wheel geared to a stationary rack. The "speed 1 1 wheel turns a screw which moves a crosshead in guides through a 14" stroke* corresponding to.the ordinate distance dimension o the reciprocal ruled chart paper. To this crosshead is attached (1) planlmeter carrier arm* (2) reciprocal speed vs. distance charting pencil* and (5) cam ollower* a small precision ground ball bearing which Is held In contact with the cam through a spring arrangement. This cam ollower, integral with the crosshead, moves in a straight line and the cam swings on a cam holder which is pivoted at one end. The cam holder is connected through two levers and a bell crank to a pointer which is used to ollow the speed vs. distance graph. The "speed" wheel makes 80 revolutions to give the crosshead the 14" stroke, and the"distamoe" wheel in making one revolution causes the machine to travel about 4 " or 9 miles to the scale o the tapes used. The planlmeter "rule" is placed on the table top about the center o the 14" stroke o the crosshead, and the planlmeter carrier arm (1) is carried just enough higher to clear this rule, ormally, pencils are not inserted in (2), the charting pencil holder, as this step is skipped by the

13 1 1 S P E E D V S. D I S T A N C E G R A P H T I M E C A L C U L A T O R S I D E V I E W C R O S S H E A D S P E E D W H E E L S P R I N G B E L L C R A N K C A L C U L A T O R T R A C K F I G. 9.
14 H CO ««««
15 r t n n n n t t t u s e o t h e p l a n l m e t e r o n t h e r e c i p r o c a l c u r v e a s I t i s b e i n g g e n e r a t e d. T h e a c c u r a c y o t h e m a c h i n e h a s b e e n o u n d t o b e w i t h i n 1 %, w h i c h I s w i t h i n t h e a c c u r a c y o t h e l o c o m o t i v e s p e e d r e c o r d e r s. I I. U s e s. 1. F i n d i n g t i m e b e t w e e n a m y t w o p o i n t s o n a t a p e. F I G U R E 3. a g e 1 4. T h e t a p e i n q u e s t i o n h a s t h e t w o p o i n t s k a n d B w a c c u r a t e l y l o c a t e d a n d i s p l a c e d o n t h e m a c h i n e. T h e t a p e o l l o w e r I s p l a c e d o n t h e s t a r t i n g p o i n t A a n d a p l a n l m e t e r r e a d i n g i s - m a d e. T h e t w o h a n d c r a n k s ( t h e s p e e d w h e e l a n d t h e d i s t a n c e w h e e l ) a r e m a n i p u l a t e d s o t h a t t h e p o i n t e r o l l o w s " :. t h e a c t u a l s p e e d l i n e t o t h e e n d p o i n t l o c a t i o n, t h e d i s t a n c e ; w h e e l i s h e l d a s t a n d t h e s p e e d w h e e l i a t u r n e d u n t i l t h e c a r r i a g e a r r i v e s a t t h e z e r o m " B p o s i t i o n C,. T h e s p e e d w h e e l i s t h e n h e l d a s t w h i l e t h e d i s t a n c e w h e e l i s t u r n e d u n t i l t h e p o i n t e r r e a c h e s p o i n t, D v e r t i c a l l y I n l i n e w i t h s t a r t i n g p o i n t " A ", w h e r e t h e d i s t a n c e w h e e l i s s t o p p e d a n d t h e s p e e d w h e e l i s t u r n e d u n t i l t h e p o i n t e r I s a t t h e s t a r t i n g p o i n t " A ". T h e ' p l a n l m e t e r i s r e a d, a n d t h e d i e r e n c e b e t w e e n t h i s r e a d i n g a n d t h e o r i g i n a l r e a d i n g i s m u l t i p l i e d b y t h e c o n s t a n t, t h u s : x «8. 6 m i n u t e s r o m n A n t o n B n T h i s p r o c e d u r e i s t h e n r e p e a t e d t o o b t a i n a c h e c k o t h e p l a n l m e t e r r e a d i n g. I t w i l l b e s e e n t h a t w h i l e t h e a c t u a l o l l o w e r o n t h e t a p e t r a v e r s e s t h e a r e a A ~ B ~ 0 ~ D ~ A,
16 t i i L , U J OC U a. t n ; OC => o I..050 a i u u a. NOTE - LOCATION OF LINE "CD" DEPENDS MERELY UPON CAM DETAIL WHICH ENABLES PLANIMETER TO REACH THE ZERO LINE " C'D* " ON THE RECIPROCAL CURVE AREA = 3.59 SQ. IN. = 8.6 MINUTES _j.033 '< o o <r.025 a. o.020 ac ^.oilk, DISTANCE - MILES FIG. 4 oc X t 4 6 DISTANCE - FIG. 3 MILES E X A M P L E O F F I N D I N G T I M E B E T W E E N A N Y T W O P O I N T S " A " A N D " B " O N A S P E E D V S. D I S T A N C E G R A P H
17 -. F I G U R E 5, t h e p l a n l m e t e r a c t u a l l y t r a v e l e d t h e p a t h, A - B C - D - A, a n d t h e t i m e i a p r o p o r t i o n a l t o t h e a r e a A B C D 2. L o s s o t i m e d u e t o a s l o w d o w n, F I G U R E 5, P a g e 1 6 P o i n t " A 1 1 r e p r e s e n t s a n y l o c a t i o n a t w h i c h a r e d u c t i o n I n s p e e d i s. n e c e s s a r y a n d p o i n t W G N r e p r e s e n t s t h e l o c a t i o n w h e r e t h e o r i g i n a l s p e e d i s r e g a i n e d. B e t w e e n t h e t w o p o i n t s " A * a n d N G N t h e r e o r e, t h e r e a r e t w o l i m e s, o n e t h e a c t u a l s p e e d l i n e, A B O, a n d t h e o t h e r t h e s p e e d l i n e a s w o u l d a p p e a r i n o s l o w d o w n h a d b e e n m a d e, A G. h e p o i n t e r i s p l a c e d o n p o i n t " A 1 1, a p l a n l m e t e r r e a d i n g t a k e n, a n d t h e. p o i n t e r i s c a u s e d t o o l l o w t h e a c t u a l s p e e d l i n e A - B - O, t h e n r e t u r n e d o v e r t h e d i r e c t r o u t e G t o A. h e p l a n l m e t e r r e a d i n g i s t a k e n, c h e c k e d w i t h a n o t h e r m e a s u r e m e n t, a n d t h e m m u l t i p l i e d b y t h e c o n s t a n t, : * * 6 7 x # ~ 1. 7 m i n u t e s l o s t d u e t o s l o w d o w n. I t w i l l b e s e e n t h a t w h i l e t h e a c t u a l o l l o w e r o n t h e t a p e t r a v e r s e s t h e a r e a A B C, F I G U R E 5, t h e p l a n l m e t e r a c t u a l l y t r a v e l e d t h e p a t h A B G, F I G U R E L o s s o t i m e d u e t o a s t o p. F I G U R E 7, P a g e 1 7. D i e r e n c e i n t i m e b e t w e e n r u n n i n g A t o a t c o n s t a n t s p e e d a n d m a k i n g a s t o p a t B. T o o b t a i n t i m e l o s t, p l a c e p o i n t e r a t p o i n t " A *, F I G U R E 7, r e a d p l a n l m e t e r, a n d m o v e p o i n t e r t o B ~ C *» A # -
18 t ui OC Ui CL V> OC O X o UJ a. o < a t a. c ac O I 2 5 ^ c D I S T A N C E - M I L E S F I G. 6 I D I S T A N C E - M I L E S F I G. 5 E X A M P L E O F F I N D I N G T I M E L O S T D U E T O A S L O W D O W N B E T W E E N P O I N T S " A " A N D " C " O N A S P E E D V S. D I S T A N C E G R A P H
19 t j 1 7 # a: yj C L C O Q 3 O X.050 a u U L J C O < a o ec C L, o K, DISTANCE - FIG. 8 MILES Z E R O ) 4 6 DISTANCE - MILES FIG 7 E X A M P L E O F F I N D I N G T I M E L O S T D U E T O A S T O P A T P O I N T " B " O N A S P E E D V S. D I S T A N C E G R A P H
20 l l l e a d p l a n i m e t e r a n d o b t a i n a r e a u n d e r t h e r e c i p r o c a l c u r v e, w h i c h m u l t i p l i e d b y t h e c o n s t a n t e q u a l s t i m e l o s t d u e t o t h e s t o p : * * 1 2 x 0 * # 1 m i n u t e s, r o m t a p e * I t w i l l b e n o t e d t h a t t h e t a p e s d o n o t r e c o r d s p e e d b e l o w 1 0 I P H, a l t h o u g h t h e t a p e m o v e s t h r o u g h t h e i n s t r u m e n t w h e n e v e r t h e l o c o m o t i v e m o v e s * I t i s t h e r e o r e n e c e s s a r y t o m a k e a n a l l o w a n c e o r t h e t i m e s p e n t b e l o w 1 M P H w h i c h i s n o t s h o w n o n t h e t a p e * T h e t i m e a n d d i s t a n c e s p e n t i n r e d u c i n g s p e e d r o m 1 M P H t o a s t o p i s v e r y s m a l l a n d i s c o n s i d e r e d n e g l i g i b l e * A c c e l e r a t i n g h o w e v e r, t a k e s m o r e t i m e, a n d t a k e n r o m a c t u a l d y n a m o m e t e r t e s t s w i t h p a s s e n g e r t r a i n s, a m a l l o w a n c e o 3 0 s e c o n d s o r 0 * 5 m i n u t e s i s u s e d o n a l l s t a r t s, w h i c h a l l o w a n c e i s a d d e d t o t h e t i m e o u n d a b o v e w i t h t h e c a l c u l a t o r, t h u s : - 3 * 1 * 0 * 5 s 3 * 6 m i n u t e s i s t h e a c t u a l t i m e l o s t d u e t o s t o p p i n g a t p o i n t,, w i t h s t a n d i n g t i m e z e r o * F I G U H E 8 i n d i c a t e s t h e r e c i p r o c a l c u r v e o r F I G H I 7. r e c o r d s * 4 * L a y o u t o s c h e d u l e s h a s e d o n a c t u a l l o c o m o t i v e s S u c h l a y o u t s a r e m o s t c o n v e n i e n t l y a r r a n g e d o n a d i v i s i o n b a s i s ; d i v i s i o n s u s u a l l y r a n g i n g r o m t o 2 5 m i l e s i m l e n g t h, a n d e a c h d i r e c t i o n c o n s i d e r e d s e p a r a t e l y * T h e l o c a t i o m o a l l i x e d p o i n t s i s l a i d o u t t o t h e s a m e s c a l e a s t h e s p e e d r e c o r d e r t a p e s, l n e q u a l s t w o m i l e s
21 T h e m a x i m u m a l l o w a b l e s p e e d s a r e t h e m p l o t t e d o m t h i s t a p e o r t h e w h o l e d i v i s i o n, a n d a c t u a l s p e e d v s. d i s t a n c e g r a p h s p e e d s m u s t n o t e x c e e d t h e s e l i m i t s a t a n y p o i n t. A c t u a l s p e e d r e c o r d e r t a p e s a r e t h e n s e l e c t e d o r t r a i n s o a s p e c i i c n u m b e r o c a r s a n d t o t a l t r a i n w e i g h t o r t h e d i v i s i o n i n v o l v e d. A s u i c i e n t n u m b e r o t a p e s i s u s e d t o i n s u r e r e p r e s e n t a t i v e p e r o r m a n c e. A c o m p o s i t e s p e e d v s. d i s t a n c e g r a p h i s t h e n s k e t c h e d I n, o l l o w i n g t h e p r o i l e o t h e l i n e * c a r e u l l y, a n d t h e i n i s h e d g r a p h i s t a k e n a s r e p r e s e n t i n g a c t u a l g o o d o p e r a t i o n o v e r t h e d i v i s i o n o r a c e r t a i n w e i g h t t r a i n. T i m i n g p o i n t s a r e s e l e c t e d r o m a c t u a l t i m e t a b l e p r a c t i c e. A l t h o u g h a t r a i n m a y n o t m a k e a n y s t o p s b e t w e e n d i v i s i o n p o i n t s, t i m e i s s h o w n a t v a r i o u s i n t e r m e d i a t e p o i n t s, b o t h o r t h e u s e o t h e e n g i n e m a n i n c h e c k i n g h i s p r o g r e s s o v e r t h e d i v i s i o n, a n d t h e t r a i n d i s p a t c h e r i n m a k i n g d e c i s i o n s a s t o o p e r a t i n g m a t t e r s. T h e s e i n t e r m e d i a t e t i m i n g p o i n t s a r e a l s o n e c e s s a r y s o t h a t a l l o t h e r t r a i n s o n t h e d i v i s i o n a r e i n o r m e d a s t o p a s s i n g a n d m e e t i n g t i m e s, e t c. T h e c o m p o s i t e t a p e i s t h e n p u t o n t h e t i m e c a l c u l a t o r a n d t h e t i m e b e t w e e n e a c h t w o t i m i n g p o i n t s d e t e r m i n e d. A s a m a t t e r o i n t e r e s t a n d i n o r m a t i o n, t h e t i m e l o s s e s d u e t o e a c h s t o p a n d s l o w d o w n a r e a l s o d e t e r m i n e d a n d r e c o r d e d o n t h e c o m p o s i t e t a p e. T h e m a j o r i t y o r a i l r o a d t i m e t a b l e s g i v e t i m e t o t h e
22 nearest minute, although in congested territory the hal minute is sometimes used* For the composite tapes, time is computed to the nearest tenth o a minute in order to obtain more detail, and to aid In adjusting the inal time accurately to the nearest minute* his method thereore actually represents a train plotting Its own timetable, and by careul use o existing locomotive records enables the ormulating o a railroad timetable which gives proper proportioning o overall division time between various timing points* Timing points either require the services o an operator, towerman or an automatic device which t t 0S s n trains as they pass a particular point without the services o an operator* The term n S is an abbreviation in standard usage meaning a Hrain report 1 1, and comes rom the term, 11 Out o Station* 1 * D# Recommendations or timetables based on results o a schedule layout using proper proportioning o time between timing points* Time in minutes and tenths as obtained by the time calculator represents the perormance o a train with a given number o cars making stops as noted on the graph* It stands or the best perormance possible tinder good operating conditions with a similar type locomotive* Any o the conditions listed below will require more time than is shown:- 1* Bad weather 2* lead or side wind, or both 3* lad rail condition (slippery rail)
23 4 * L o c o m o t i v e u n a b l e t o d u p l i c a t e p e r o r m a n c e d u e t o b e i n g l e s s p o w e r u l t h a n t h o s e u s e d i n m a k i n g t h e c o m p o s i t e t a p e, o r d u e t o m e c h a n i c a l t r o u b l e s, l o w s t e a m p r e s s u r e, p o o r i r i n g c o n d i t i o n s, e t c. 1. I n t e r e r e n c e w i t h o t h e r t r a i n s. 6. U n s c h e d u l e d s t o p s o r s l o w d o w n s. T. B e l a y s d u e t o a n y r e a s o n ; t r a c k w o r k, b r i d g e w o r k, e t c. 8. M o r e c a r s o r t r a i n o g r e a t e r w e i g h t t h a n t h a t u s e d i n m a k i n g t h e c o m p o s i t e t a p e. I t i s t h e r e o r e e v i d e n t t h a t a t r a i n s c h e d u l e s h o u l d b e p r e p a r e d w i t h a m a r g i n o s a e t y t o c o m p e n s a t e o r a n y o t h e a b o v e l i s t e d c o n d i t i o n s i i t i s t o r e p r e s e n t a t i m e t a b l e w h i c h c a n b e o l l o w e d b y t r a i n s u n d e r a l l c o n d i t i o n s, e x c e p t i n g a c c i d e n t s s u c h a s w a s h o u t s a n d l a n d s l i d e s w h i c h c a n n o t b e o r e s e e n. L i k e w i s e, a t i m e t a b l e g e n e r a l l y d o e s n o t s p e c i y a m a x i m u m n u m b e r o c a r s o r t r a i n w e i g h t i n p a s s e n g e r s e r v i c e, b u t i s m a d e t o h a n d l e a s w i d e a v a r i a t i o n i n o p e r a t i n g c o n d i t i o n s a s i s p r a c t i c a l. I n s o m e o r e i g n c o u n t r i e s, c e r t a i n p a s s e n g e r t r a i n s a r e r i g i d l y l i m i t e d i n t r a i n w e i g h t i n o r d e r t h a t a s t s c h e d u l e s m a y b e a d h e r e d t o. H o w e v e r, s i n c e e a c h a d d e d c a r r e q u i r e s m o r e e n e r g y t & p u l l i t, i t i s o b v i o u s t h a t e a c h c a r a d d e d o v e r t h a t u s e d o n t h e c o m p o s i t e t a p e w i l l r e q u i r e m o r e t i m e o r t h e t r a i n t o c o v e r t h e d i v i s i o n. A l t h o u g h l o c o m o t i v e s a r e d e s i g n e d t o h a v e r e s e r v e
24 capacity to cope with conditions as they arise which require more power, the wisdom o shortening schedules and Increasing train weights beyond practical limits may well he questioned i the n On Time 1 1 percentage is to he kept to a satisactorily high igure* o the passengers, an 11 m Time 1 1 arrival is usually much preerred, even though the overall time is longer, to a shorter time, and have the train put them into their destination or transer point late* Saety demands that maximum allowable speeds not be exceeded and thereore timetables should represent perormance that it is possible to maintain in the ace o all expected diiculties* 1* Solution o Special Problems*. 1* Possible means o Shortening Schedules* a* lerouting trains* This methodlis sometimes resorted to when an alternate route is available which will lessen traic congestion* The alternate route is charted, irst locating ixed points, then assigning the maximum allowable speed which would be permitted over the new route* Grades are taken into account and the speed vs* distance graph sketched in, using as a basis any locomotive speed recorder tapes available over this route* The time calculator then gives the time over the new route, and I enough time can be saved by using the new route over the original route, the trains may be rerouted to advantage* I no time can he saved by the alternate
25 route, Its use will depend upon some actor other than time saving. Under this seme heading in a territory where congestion o trains causes progressive delays to ollowing trains, it is oten possible to install additional automatic signaling to operate trains "against the current o traic 1 1 during certain periods o the day when opposing traic is light. This is done under strict control to avoid any possibility o two trains entering the same track in opposing directions* It involves certain expense in additional equipment and in order to obtain a igure on total time saving the speed recorder tapes may again be reerred to. Since some time is lost due to slowing down or a crossover move rom one track to another, the new alternate route must alleviate congestion and more than oset the delay due to slowing down or the crossover move. A base tape is prepared and the location o the crossover is plotted thereon and the probable train perormance on the crossover is sketched in. The time calculator will then give the time lost due to slowing down or the crossover and this igure may be used in estimating the economies o the proposed remedy which, in eect, provides the use o an additional track during peak periods o traic. b. Raising maximum permissable running speeds:-*
26 The present operation is obtained rom actual locomotive-records and the proposed speed limits plotted on the same chart* By using the proile o the line, the new speed vs. distance graph may he sketched in, and the dierence in time may be obtained by the time calculator* c* Elimination o Stops or Slowdowns s-> The present operation at any point o speed restriction is obtained rom actual locomotive records* he proposed elimination would allow speeds as sketched In, taking into account the proile o the line* he time lost is then calculated and would represent the saving i the stop or slowdown were eliminated* 2* Cost o Stops and Slowdowns* This igure has been calculated many tines and by many methods, most o which take into account many items which cannot be classed entirely n out o pocket 1 1 expense. In order to obtain readily an estimate which may be quickly arrived at, the actual speed vs* distance graphs rom the locomotives are used. In 1I0U11 1 1, Page 2S, the time lost due to slowing down ro A to B is ound on the time calculator, the time consumed rom A to C had no slowdown been made, and the time rom B to 0* From the igure it will be noted that line AC denotes a train running without change o speed and the
27 uel rate (pounds o coal per hour) may be readily estimated. Likewise, the curve BC represents the acceleration ater slowing down rom A to B. Practically no coal is used rom A to B, only enough being ed to keep the ire in readiness or acceleration. For the accelerating period, the coal rate may also be readily estimated. Thereore the loss o eoal due to this slowdown Is equal to time BC x lbs. coal per hour BC minus tine AC x lbs. coal per hour AC. Since the amount o water evaporated by a locomotive boiler is roughly proportional to the uel burned, this same method may be used to estimate the amount o water lost due to a stop or slowdown. The amount o coal or water ound by the above means may be converted into dollars by applying the proper cost igures which are in eect in the locality in question. Putting into igures the example shown in FIGURE 11, Page 26, it is ound that the time AG equals 8.1 minutes, and the time BC equals 10.7 minutes. Probable coal rates are as ollows:* Running, lbs. coal per hour z 7000j per minute s 117. Accelerating, lbs. coal per hour z 11000j per minute» 183. Thereore: 10.7 x x 117 s 1010 lbs. coal lost due to the slowdown.
28 26, 4 6 DISTANCE - MILES FIG.II DISTANCE - MILES FIG. 12 T Y P I C A L S P E E D V S. D I S T A N C E G R A P H S L O C O M O T I V E S P E E D R E C O R D E R
29 Since the amount o water evaporated by a passenger locomotive boiler, may be approximated at 7 lbs* water per lb* coal while running, and 6 lbs. water per lb* coal while accelerating, it ollows that5- Sal* water evap* per min* x gal* per tox mlnmte while running, and:- #al* water evap* per min* x gal* per minute, while accelerating* thereore in the case in FI00BB 11* Page 26j 10*7 x 132 8*1 x gallons o water lost due to the slowdown* I the cost o coal is $4*00 per ton, the cost o the slowdown in uel alone is:*» 1010 x 400 s #2*02 m m " 3* Determination o the Amount o Slipping which occurs when a locomotive loses traction* this igure is usually expressed in two ways} irst as the maximum driving wheel speed as compared with the actual locomotive speed, and second, how many extra revolutions o the driving wheels were made during the period o slipping* A typical slip has been reproduced rom a speed vs* distance graph indicating a maximum driver speed o 90 MPH
30 WITH A LOCOMOTIVE SPEED OF 50 IPH IM FI3DBB 12, PAGE 26* SINCE THE TRAVEL OF THE SPEED RECORDER TAPE IS DIRECTLY PROPORTIONAL TO THE DISTANCE TRAVELED FEY THE LOCO MOTIVE DRIVING WHEELS, IT DOES MOT THEREFORE INDICATE LOCO MOTIVE DISTANCE TRAVELED DURING PERIODS WHEN SLIPPING OCCURS* POINTS A AND B, FIGURE 12, INDICATE ACTUAL LOCOMOTIVE SPEEDS JUST BEFORE AND AFTER A SLIP OF THE DRIVING WHEELS* IT IS ASSUMED THAT THE SPEEDOMETER FRICTION DRIVE WHEEL DOES NOT LOSE CONTACT WITH THE DRIVING TIRE DURING THE SLIP* FHE TIME CALCULATOR IS RUN OVER THE ACTUAL LINE ON THE TAPE FROM A TO B (0*62 OLIOS-)' AND THE TIME COMPUTED AS 0*5 MINUTES, FHE ACTUAL LOCOMOTIVE SPEED DURING THIS SLIP FOLLOWS THE REGULAR SPEED LINE FROM A TO B TO THE POINT C, AND IS APPROXIMATELY 50 MPH* FHE ACTUAL DISTANCE TRAVELED BY THE LOCOMOTIVE AC EQUALS SPEED (50 MPH) X TIME (0*5 * 60 HOURS) EQUALS 0*416 MILES, AND WILL ALWAYS BE LESS THAN THE DISTANCE AB* DISTANCE CB THEN EQUALS THE DISTANCE TRAVELED BY THE LOCOMOTIVE DRIVERS IN EXCESS OF THAT TRAVELED BY THE LOCOMOTIVE DURING SLIPPING* IF THE LOCOMOTIVE INVOLVED HAD DRIVING WHEELS 79 w IN DIAMETER, THOSE WHEELS WOULD HAVE TURNED 158 REVOLUTIONS, WHILE WITHOUT SLIPPING, THEY WOULD HAVE TURNED ONLY 106 REVOLUTIONS *
Casting Physics Simplified Part Two. Frames of Reference
 Casting Physics Simplified Part Two Part one of this paper discussed physics that applies to linear motion, i.e., motion in a straight line. This section of the paper will expand these concepts to angular
Casting Physics Simplified Part Two Part one of this paper discussed physics that applies to linear motion, i.e., motion in a straight line. This section of the paper will expand these concepts to angular
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere
 Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 32 Introduction To Comparators, Mechanical Comparators (Refer Slide Time: 00:15) I welcome you
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 32 Introduction To Comparators, Mechanical Comparators (Refer Slide Time: 00:15) I welcome you
10/23/2015. Chapter 7. Velocity in Mechanisms. (Relative Velocity Method) Mohammad Suliman Abuhaiba, Ph.D., PE
 Mohammad Suliman Abuhaiba, Ph.D., PE") Chapter 7 Velocity in Mechanisms (Relative Velocity Method) 1 2 7.2. Relative Velocity of Two Bodies Moving in Straight Lines 3 7.3. Motion of a Link Velocity of any point on a link wrt another point on
Chapter 7 Velocity in Mechanisms (Relative Velocity Method) 1 2 7.2. Relative Velocity of Two Bodies Moving in Straight Lines 3 7.3. Motion of a Link Velocity of any point on a link wrt another point on
Performance evaluation of first stage support system of launcher
 Journal of Scientific & Industrial Research Vol. 64, December 005, pp. 949-956 Performance evaluation of first stage support system of launcher A C Pankaj 1, *, Jhankar Basu 1, S N Shome 1, P K Mehta and
Journal of Scientific & Industrial Research Vol. 64, December 005, pp. 949-956 Performance evaluation of first stage support system of launcher A C Pankaj 1, *, Jhankar Basu 1, S N Shome 1, P K Mehta and
product manual H-3220A Benkelman Beam
 05.12 product manual H-3220A Benkelman Beam General The H-3220A Benkelman Beam Apparatus is a convenient and accurate device used for measuring the deflection of flexible pavements under moving wheel
05.12 product manual H-3220A Benkelman Beam General The H-3220A Benkelman Beam Apparatus is a convenient and accurate device used for measuring the deflection of flexible pavements under moving wheel
The basic dynamic load rating C is a statistical number and it is based on 90% of the bearings surviving 50 km of travel carrying the full load.
 Technical data Load Rating & Life Under normal conditions, the linear rail system can be damaged by metal fatigue as the result of repeated stress. The repeated stress causes flaking of the raceways and
Technical data Load Rating & Life Under normal conditions, the linear rail system can be damaged by metal fatigue as the result of repeated stress. The repeated stress causes flaking of the raceways and
Chapter 10-Work, Energy & Power
 DULLES HIGH SCHOOL Chapter 10-Work, Energy & Power Energy Transformations Judy Matney 1/12/2016 In this chapter, we will study the concepts of force and work; we will understand the transformations of
DULLES HIGH SCHOOL Chapter 10-Work, Energy & Power Energy Transformations Judy Matney 1/12/2016 In this chapter, we will study the concepts of force and work; we will understand the transformations of
Sect 4.2 Applications of Ratios and Proportions
 15 Sect 4.2 Applications of Ratios and Proportions Objective 1: Scale Drawings In designing blueprints for a house or creating a model airplane, the measurements on the blueprints or on the model airplane
15 Sect 4.2 Applications of Ratios and Proportions Objective 1: Scale Drawings In designing blueprints for a house or creating a model airplane, the measurements on the blueprints or on the model airplane
https://njctl.org/courses/science/ap-physics-c-mechanics/attachments/summerassignment-3/
 AP Physics C Summer Assignment 2017 1. Complete the problem set that is online, entitled, AP C Physics C Summer Assignment 2017. I also gave you a copy of the problem set. You may work in groups as a matter
AP Physics C Summer Assignment 2017 1. Complete the problem set that is online, entitled, AP C Physics C Summer Assignment 2017. I also gave you a copy of the problem set. You may work in groups as a matter
Family Name (Please print Given Name(s) Student Number Practical Group in BLOCK LETTERS) as on student card Code
 Student Number Practical Group in BLOCK LETTERS) as on student card Code") Family Name (Please print Given Name(s) Student Number Practical Group in BLOCK LETTERS) as on student card Code PHY131H1F - SUMMER Term Test version 1 Thursday, May 27, 2010 Duration: 80 minutes PLEASE
Family Name (Please print Given Name(s) Student Number Practical Group in BLOCK LETTERS) as on student card Code PHY131H1F - SUMMER Term Test version 1 Thursday, May 27, 2010 Duration: 80 minutes PLEASE
Simple Machines. Bởi: OpenStaxCollege
 F Simple Machines Simple Machines Bởi: OpenStaxCollege Simple machines are devices that can be used to multiply or augment a force that we apply often at the expense of a distance through which we apply
F Simple Machines Simple Machines Bởi: OpenStaxCollege Simple machines are devices that can be used to multiply or augment a force that we apply often at the expense of a distance through which we apply
Lecture 4 February 13, Mechanization
 Lecture 4 February 13, 2006 Mechanization US Energy Consumption from all forms of energy from 1850-2000 1 The Lever Archimedes (Greek mathematician, 287 to 212 B.C.) who is believed to have said, Give
Lecture 4 February 13, 2006 Mechanization US Energy Consumption from all forms of energy from 1850-2000 1 The Lever Archimedes (Greek mathematician, 287 to 212 B.C.) who is believed to have said, Give
Dynamics Plane kinematics of rigid bodies Section 4: TJW Rotation: Example 1
 Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
Problem Solving Circular Motion Dynamics Challenge Problems
 Problem 1: Double Star System Problem Solving Circular Motion Dynamics Challenge Problems Consider a double star system under the influence of gravitational force between the stars. Star 1 has mass m 1
Problem 1: Double Star System Problem Solving Circular Motion Dynamics Challenge Problems Consider a double star system under the influence of gravitational force between the stars. Star 1 has mass m 1
Cambridge International Examinations Cambridge Ordinary Level
 Cambridge International Examinations Cambridge Ordinary Level *4817101212* PHYSICS 5054/21 Paper 2 Theory May/June 2016 1 hour 45 minutes Candidates answer on the Question Paper. No Additional Materials
Cambridge International Examinations Cambridge Ordinary Level *4817101212* PHYSICS 5054/21 Paper 2 Theory May/June 2016 1 hour 45 minutes Candidates answer on the Question Paper. No Additional Materials
Acceleration and Some Locomotive Problems
 The Transit Volume 11 Article 10 1-1-1906 Acceleration and Some Locomotive Problems William G. Raymond University of Iowa Follow this and additional works at: https://ir.uiowa.edu/transit Part of the Engineering
The Transit Volume 11 Article 10 1-1-1906 Acceleration and Some Locomotive Problems William G. Raymond University of Iowa Follow this and additional works at: https://ir.uiowa.edu/transit Part of the Engineering
RESOLUTION MSC.362(92) (Adopted on 14 June 2013) REVISED RECOMMENDATION ON A STANDARD METHOD FOR EVALUATING CROSS-FLOODING ARRANGEMENTS
 (Adopted on 14 June 2013) REVISED RECOMMENDATION ON A STANDARD METHOD FOR EVALUATING CROSS-FLOODING ARRANGEMENTS") (Adopted on 4 June 203) (Adopted on 4 June 203) ANNEX 8 (Adopted on 4 June 203) MSC 92/26/Add. Annex 8, page THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) o the Convention on the International
(Adopted on 4 June 203) (Adopted on 4 June 203) ANNEX 8 (Adopted on 4 June 203) MSC 92/26/Add. Annex 8, page THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) o the Convention on the International
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
UNIT 6 GOVERNORS. 6.5 Controlling force and and stability of spring controlled Governors. Compiled By. Dr. B. Suresha, Professor
 UNIT 6 GOVERNORS STRUCTURE 6.1 Introduction 6.1.1 Objectives 6. Types of Governors 6..1 Porter Governor 6.. Hartnell Governor 6.3 Governor effort and Power 6.4 Characteristics of Governors 6.5 Controlling
UNIT 6 GOVERNORS STRUCTURE 6.1 Introduction 6.1.1 Objectives 6. Types of Governors 6..1 Porter Governor 6.. Hartnell Governor 6.3 Governor effort and Power 6.4 Characteristics of Governors 6.5 Controlling
Varuvan Vadivelan. Institute of Technology LAB MANUAL. : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester. Regulation Branch Year & Semester
 Varuvan Vadivelan Institute of Technology Dharmapuri 636 703 LAB MANUAL Regulation Branch Year & Semester : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester ME 6511 - DYNAMICS LABORATORY GENERAL
Varuvan Vadivelan Institute of Technology Dharmapuri 636 703 LAB MANUAL Regulation Branch Year & Semester : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester ME 6511 - DYNAMICS LABORATORY GENERAL
Advanced Higher Physics. Rotational motion
 Wallace Hall Academy Physics Department Advanced Higher Physics Rotational motion Problems AH Physics: Rotational Motion 1 2013 Data Common Physical Quantities QUANTITY SYMBOL VALUE Gravitational acceleration
Wallace Hall Academy Physics Department Advanced Higher Physics Rotational motion Problems AH Physics: Rotational Motion 1 2013 Data Common Physical Quantities QUANTITY SYMBOL VALUE Gravitational acceleration
CPO Science Foundations of Physics
 CPO Science Foundations of Physics Unit 4, Chapter 10 Chapter 9 Unit 4: Energy and Momentum Chapter 10 Work and Energy 10.1 Machines and Mechanical Advantage 10.3 Energy and Conservation of Energy Chapter
CPO Science Foundations of Physics Unit 4, Chapter 10 Chapter 9 Unit 4: Energy and Momentum Chapter 10 Work and Energy 10.1 Machines and Mechanical Advantage 10.3 Energy and Conservation of Energy Chapter
Chapter: Work and Machines
 Table of Contents Chapter: Work and Machines Section 1: Work Section 2: Using Machines Section 3: Simple Machines 1 Work What is work? To many people, the word work means something they do to earn money.
Table of Contents Chapter: Work and Machines Section 1: Work Section 2: Using Machines Section 3: Simple Machines 1 Work What is work? To many people, the word work means something they do to earn money.
Q.1 a) any six of the following 6x2= 12. i) Define - ( Each term 01 mark)
 any six of the following 6x2= 12. i) Define - ( Each term 01 mark)") Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate
Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate
SUMMER 14 EXAMINATION
 Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate
Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 4 - LIFTING MACHINES
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 4 - LIFTING MACHINES CONTENT Be able to determine the operating characteristics of lifting
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 4 - LIFTING MACHINES CONTENT Be able to determine the operating characteristics of lifting
Lecture Outline. Chapter 7: Energy Pearson Education, Inc.
 Lecture Outline Chapter 7: Energy This lecture will help you understand: Energy Work Power Mechanical Energy: Potential and Kinetic Work-Energy Theorem Conservation of Energy Machines Efficiency Recycled
Lecture Outline Chapter 7: Energy This lecture will help you understand: Energy Work Power Mechanical Energy: Potential and Kinetic Work-Energy Theorem Conservation of Energy Machines Efficiency Recycled
3 Using Newton s Laws
 3 Using Newton s Laws What You ll Learn how Newton's first law explains what happens in a car crash how Newton's second law explains the effects of air resistance 4(A), 4(C), 4(D), 4(E) Before You Read
3 Using Newton s Laws What You ll Learn how Newton's first law explains what happens in a car crash how Newton's second law explains the effects of air resistance 4(A), 4(C), 4(D), 4(E) Before You Read
Lecture Outline. Chapter 7: Energy Pearson Education, Inc.
 Lecture Outline Chapter 7: Energy This lecture will help you understand: Energy Work Power Mechanical Energy: Potential and Kinetic Work-Energy Theorem Conservation of Energy Machines Efficiency Recycled
Lecture Outline Chapter 7: Energy This lecture will help you understand: Energy Work Power Mechanical Energy: Potential and Kinetic Work-Energy Theorem Conservation of Energy Machines Efficiency Recycled
MODELLING PUBLIC TRANSPORT CORRIDORS WITH AGGREGATE AND DISAGGREGATE DEMAND
 MODELLIG PUBLIC TRASPORT CORRIDORS WITH AGGREGATE AD DISAGGREGATE DEMAD Sergio Jara-Díaz Alejandro Tirachini and Cristián Cortés Universidad de Chile ITRODUCTIO Traditional microeconomic modeling o public
MODELLIG PUBLIC TRASPORT CORRIDORS WITH AGGREGATE AD DISAGGREGATE DEMAD Sergio Jara-Díaz Alejandro Tirachini and Cristián Cortés Universidad de Chile ITRODUCTIO Traditional microeconomic modeling o public
Chapter 05 Test A. Name: Class: Date: Multiple Choice Identify the choice that best completes the statement or answers the question.
 Class: Date: Chapter 05 Test A Multiple Choice Identify the choice that best completes the statement or answers the question. 1. The SI unit of force preferred by scientists is the: a. kilogram. b. newton.
Class: Date: Chapter 05 Test A Multiple Choice Identify the choice that best completes the statement or answers the question. 1. The SI unit of force preferred by scientists is the: a. kilogram. b. newton.
acceleration weight load
 Instructions for Vocabulary Cards: Please photocopy the following pages onto heavy card stock (back to back, so the word is printed on the back side of the matching definition). Then, laminate each page.
Instructions for Vocabulary Cards: Please photocopy the following pages onto heavy card stock (back to back, so the word is printed on the back side of the matching definition). Then, laminate each page.
product manual H-4204 Proving Ring Penetrometer
 05.09 product manual H-4204 Proving Ring Penetrometer nnmm Handle Proving Ring Extension Rod Coupler Penetration Rod Cone Figure #1 General Information The Proving Ring Penetrometer is a cone type of penetrometer
05.09 product manual H-4204 Proving Ring Penetrometer nnmm Handle Proving Ring Extension Rod Coupler Penetration Rod Cone Figure #1 General Information The Proving Ring Penetrometer is a cone type of penetrometer
CHAPTER 2 LINEAR MOTION
 0 CHAPTER LINEAR MOTION HAPTER LINEAR MOTION 1 Motion o an object is the continuous change in the position o that object. In this chapter we shall consider the motion o a particle in a straight line, which
0 CHAPTER LINEAR MOTION HAPTER LINEAR MOTION 1 Motion o an object is the continuous change in the position o that object. In this chapter we shall consider the motion o a particle in a straight line, which
Kinematics of. Motion. 8 l Theory of Machines
 8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
Motion and Forces study Guide
 Motion and Forces study Guide Completion Complete each statement. 1. The motion of an object looks different to observers in different. 2. The SI unit for measuring is the meter. 3. The direction and length
Motion and Forces study Guide Completion Complete each statement. 1. The motion of an object looks different to observers in different. 2. The SI unit for measuring is the meter. 3. The direction and length
1. Replace the given system of forces acting on a body as shown in figure 1 by a single force and couple acting at the point A.
 Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
AP Physics C Summer Assignment Kinematics
 AP Physics C Summer Assignment Kinematics 1. A car whose speed is 20 m/s passes a stationary motorcycle which immediately gives chase with a constant acceleration of 2.4 m/s 2. a. How far will the motorcycle
AP Physics C Summer Assignment Kinematics 1. A car whose speed is 20 m/s passes a stationary motorcycle which immediately gives chase with a constant acceleration of 2.4 m/s 2. a. How far will the motorcycle
Q1. (a) The diagram shows a car being driven at 14 rn/s. The driver has forgotten to clear a thick layer of snow from the roof.
 The diagram shows a car being driven at 14 rn/s. The driver has forgotten to clear a thick layer of snow from the roof.") Q1. (a) The diagram shows a car being driven at 14 rn/s. The driver has forgotten to clear a thick layer of snow from the roof. Which of the following has the smallest momentum? Draw a circle around your
Q1. (a) The diagram shows a car being driven at 14 rn/s. The driver has forgotten to clear a thick layer of snow from the roof. Which of the following has the smallest momentum? Draw a circle around your
Introduction. Earlier. To Scales. We talked about. L Dimensions
 1 Introduction To Scales Introduction 2 Earlier We talked about Dimensions T Parts of the dimension object OExtension lines ODimension line OArrowheads ONumeric value T ocation of the numeric value Earlier
1 Introduction To Scales Introduction 2 Earlier We talked about Dimensions T Parts of the dimension object OExtension lines ODimension line OArrowheads ONumeric value T ocation of the numeric value Earlier
2010 Winter Weather Advisory
 2010 Winter Weather Advisory Winter Has Arrived! Temperatures are cooler/downright cold! Ice may exist even when ambient temps are above freezing, especially in early mornings or following a hard freeze
2010 Winter Weather Advisory Winter Has Arrived! Temperatures are cooler/downright cold! Ice may exist even when ambient temps are above freezing, especially in early mornings or following a hard freeze
WHITE PAPER. Winter Tires
 WHITE PAPER Winter Tires WHITE PAPER Introduction According to the Federal Highway Administration accidents caused by winter weather result in 150,000 injuries and 2,000 deaths each year on average. In
WHITE PAPER Winter Tires WHITE PAPER Introduction According to the Federal Highway Administration accidents caused by winter weather result in 150,000 injuries and 2,000 deaths each year on average. In
2/27/2018. Relative Motion. Reference Frames. Reference Frames
 Relative Motion The figure below shows Amy and Bill watching Carlos on his bicycle. According to Amy, Carlos s velocity is (v x ) CA 5 m/s. The CA subscript means C relative to A. According to Bill, Carlos
Relative Motion The figure below shows Amy and Bill watching Carlos on his bicycle. According to Amy, Carlos s velocity is (v x ) CA 5 m/s. The CA subscript means C relative to A. According to Bill, Carlos
Forces and Newton s Laws
 chapter 3 Forces and Newton s Laws section 3 Using Newton s Laws Before You Read Imagine riding on a sled, or in a wagon, or perhaps a school bus that stops quickly or suddenly. What happens to your body
chapter 3 Forces and Newton s Laws section 3 Using Newton s Laws Before You Read Imagine riding on a sled, or in a wagon, or perhaps a school bus that stops quickly or suddenly. What happens to your body
Lecture Presentation Chapter 7 Rotational Motion
 Lecture Presentation Chapter 7 Rotational Motion Suggested Videos for Chapter 7 Prelecture Videos Describing Rotational Motion Moment of Inertia and Center of Gravity Newton s Second Law for Rotation Class
Lecture Presentation Chapter 7 Rotational Motion Suggested Videos for Chapter 7 Prelecture Videos Describing Rotational Motion Moment of Inertia and Center of Gravity Newton s Second Law for Rotation Class
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
A 954 C HD. Technical Description Hydraulic Excavator. Machine for Industrial Applications
 Technical Description Hydraulic Excavator A 95 C HD litronic` Machine for Industrial Applications Operating Weight 165,800 170,0 lb Engine Output 36 hp (0 kw) Technical Data Engine Rating per ISO 99 0
Technical Description Hydraulic Excavator A 95 C HD litronic` Machine for Industrial Applications Operating Weight 165,800 170,0 lb Engine Output 36 hp (0 kw) Technical Data Engine Rating per ISO 99 0
It was safe It was economical It worked (in the sense that it met all the specified operating requirements).
.") Sample Answer IRSE Exam, Module 2 (Main Line Practice), 2017 Examiners Overall Comments: By submitting a well signalled and reasonably compliant solution, this candidate was awarded high marks in the 2017
Sample Answer IRSE Exam, Module 2 (Main Line Practice), 2017 Examiners Overall Comments: By submitting a well signalled and reasonably compliant solution, this candidate was awarded high marks in the 2017
The principle of the flywheel is found before the many centuries ago in spindle and the potter's wheel.
 TOM Fly Wheel Mechanical Engineering Department The principle of the flywheel is found before the many centuries ago in spindle and the potter's wheel. A heavy-rimmed rotating wheel used to minimize variations
TOM Fly Wheel Mechanical Engineering Department The principle of the flywheel is found before the many centuries ago in spindle and the potter's wheel. A heavy-rimmed rotating wheel used to minimize variations
Analog Computing Technique
 Analog Computing Technique by obert Paz Chapter Programming Principles and Techniques. Analog Computers and Simulation An analog computer can be used to solve various types o problems. It solves them in
Analog Computing Technique by obert Paz Chapter Programming Principles and Techniques. Analog Computers and Simulation An analog computer can be used to solve various types o problems. It solves them in
One-Dimensional Motion Review IMPORTANT QUANTITIES Name Symbol Units Basic Equation Name Symbol Units Basic Equation Time t Seconds Velocity v m/s
 One-Dimensional Motion Review IMPORTANT QUANTITIES Name Symbol Units Basic Equation Name Symbol Units Basic Equation Time t Seconds Velocity v m/s v x t Position x Meters Speed v m/s v t Length l Meters
One-Dimensional Motion Review IMPORTANT QUANTITIES Name Symbol Units Basic Equation Name Symbol Units Basic Equation Time t Seconds Velocity v m/s v x t Position x Meters Speed v m/s v t Length l Meters
MEASUREMENT UNCERTAINTIES
 MEASUREMENT UNCERTAINTIES What distinguishes science rom philosophy is that it is grounded in experimental observations. These observations are most striking when they take the orm o a quantitative measurement.
MEASUREMENT UNCERTAINTIES What distinguishes science rom philosophy is that it is grounded in experimental observations. These observations are most striking when they take the orm o a quantitative measurement.
Physics for Scientist and Engineers third edition Rotational Motion About a Fixed Axis Problems
 A particular bird s eye can just distinguish objects that subtend an angle no smaller than about 3 E -4 rad, A) How many degrees is this B) How small an object can the bird just distinguish when flying
A particular bird s eye can just distinguish objects that subtend an angle no smaller than about 3 E -4 rad, A) How many degrees is this B) How small an object can the bird just distinguish when flying
Open Access Dynamic Parameters Identification for the Feeding System of Commercial Numerical Control Machine
 Send Orders or Reprints to reprints@benthamscience.net The Open Automation and Control Systems Journal, 13, 5, 161-166 161 Open Access Dynamic Parameters Identiication or the Feeding System o Commercial
Send Orders or Reprints to reprints@benthamscience.net The Open Automation and Control Systems Journal, 13, 5, 161-166 161 Open Access Dynamic Parameters Identiication or the Feeding System o Commercial
THE LOSMANDY G-11 MOUNT
 Checking the parts THE LOSMANDY G-11 MOUNT Depending on which accessories you ordered, your G-11 mount was shipped in four or more boxes. The contents of each box are as follows: Equatorial Mount Adjustable
Checking the parts THE LOSMANDY G-11 MOUNT Depending on which accessories you ordered, your G-11 mount was shipped in four or more boxes. The contents of each box are as follows: Equatorial Mount Adjustable
UNIT 2 KINEMATICS OF LINKAGE MECHANISMS
 UNIT 2 KINEMATICS OF LINKAGE MECHANISMS ABSOLUTE AND RELATIVE VELOCITY An absolute velocity is the velocity of a point measured from a fixed point (normally the ground or anything rigidly attached to the
UNIT 2 KINEMATICS OF LINKAGE MECHANISMS ABSOLUTE AND RELATIVE VELOCITY An absolute velocity is the velocity of a point measured from a fixed point (normally the ground or anything rigidly attached to the
Chapter 8 Rotational Motion
 Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
UNIVERSITY OF CAMBRIDGE INTERNATIONAL EXAMINATIONS International General Certificate of Secondary Education
 UNIVERSITY OF CAMBRIDGE INTERNATIONAL EXAMINATIONS International General Certificate of Secondary Education *8792218070* PHYSICS 0625/23 Paper 2 Core October/November 2010 1 hour 15 minutes Candidates
UNIVERSITY OF CAMBRIDGE INTERNATIONAL EXAMINATIONS International General Certificate of Secondary Education *8792218070* PHYSICS 0625/23 Paper 2 Core October/November 2010 1 hour 15 minutes Candidates
Fig. 6.1 Plate or disk cam.
 CAMS INTRODUCTION A cam is a mechanical device used to transmit motion to a follower by direct contact. The driver is called the cam and the driven member is called the follower. In a cam follower pair,
CAMS INTRODUCTION A cam is a mechanical device used to transmit motion to a follower by direct contact. The driver is called the cam and the driven member is called the follower. In a cam follower pair,
Lecture T2 The Pendulum-Based Start Gate (US 8,016,639 B2)
") 1 Lecture T2 The Pendulum-Based Start Gate (US 8,016,639 B2) INTRODUCTION Literally millions of Pinewood Derby races have been run since the inception of the race in 1953, mostly by Cub Scouts and their
1 Lecture T2 The Pendulum-Based Start Gate (US 8,016,639 B2) INTRODUCTION Literally millions of Pinewood Derby races have been run since the inception of the race in 1953, mostly by Cub Scouts and their
Second measurement. Measurement of speed of rotation and torque
 Second measurement Measurement of speed of rotation and torque 1. Introduction The power of motion is the product of torque and angular velocity P = M ω [W ] And since the angular velocity rad ω = 2 π
Second measurement Measurement of speed of rotation and torque 1. Introduction The power of motion is the product of torque and angular velocity P = M ω [W ] And since the angular velocity rad ω = 2 π
PHYSICS 111 SPRING EXAM 2: March 8, 2016; 8:15-9:45 pm
 PHYSICS 111 SPRING 2016 EXAM 2: March 8, 2016; 8:15-9:45 pm Name (printed): Recitation Instructor: Section # INSTRUCTIONS: This exam contains 20 multiple-choice questions plus 1 extra credit question,
PHYSICS 111 SPRING 2016 EXAM 2: March 8, 2016; 8:15-9:45 pm Name (printed): Recitation Instructor: Section # INSTRUCTIONS: This exam contains 20 multiple-choice questions plus 1 extra credit question,
Chapter 9: Circular Motion
 Text: Chapter 9 Think and Explain: 1-5, 7-9, 11 Think and Solve: --- Chapter 9: Circular Motion NAME: Vocabulary: rotation, revolution, axis, centripetal, centrifugal, tangential speed, Hertz, rpm, rotational
Text: Chapter 9 Think and Explain: 1-5, 7-9, 11 Think and Solve: --- Chapter 9: Circular Motion NAME: Vocabulary: rotation, revolution, axis, centripetal, centrifugal, tangential speed, Hertz, rpm, rotational
To convert a speed to a velocity. V = Velocity in feet per seconds (ft/sec) S = Speed in miles per hour (mph) = Mathematical Constant
 S = Speed in miles per hour (mph) = Mathematical Constant") To convert a speed to a velocity V S ( 1.466) V Velocity in feet per seconds (ft/sec) S Speed in miles per hour (mph) 1.466 Mathematical Constant Example Your driver just had a rear-end accident and says
To convert a speed to a velocity V S ( 1.466) V Velocity in feet per seconds (ft/sec) S Speed in miles per hour (mph) 1.466 Mathematical Constant Example Your driver just had a rear-end accident and says
Linear guide drives. Synchronous shafts The use of synchronous shafts enables several linear axes to be operated with one drive.
 Linear guide drives Drive concept The linear guides are driven via the hollow shaft in the drive head. The drive head is used to directly install a motor or alternatively (in connection with a center shaft)
Linear guide drives Drive concept The linear guides are driven via the hollow shaft in the drive head. The drive head is used to directly install a motor or alternatively (in connection with a center shaft)
Important: This test consists of 16 multiple choice problems, each worth 6.25 points.
 Physics 214 Exam 1 Spring 2005 Fill in on the OPSCAN sheet: 1) Name 2) Student identification number 3) Exam number as 01 4) Sign the OPSCAN sheet Important: This test consists of 16 multiple choice problems,
Physics 214 Exam 1 Spring 2005 Fill in on the OPSCAN sheet: 1) Name 2) Student identification number 3) Exam number as 01 4) Sign the OPSCAN sheet Important: This test consists of 16 multiple choice problems,
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics
 UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 5.3 FINAL EXAMINATION NAME: (Last) Please Print (Given) Time: 80 minutes STUDENT NO.: LECTURE SECTION (please check): 0
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 5.3 FINAL EXAMINATION NAME: (Last) Please Print (Given) Time: 80 minutes STUDENT NO.: LECTURE SECTION (please check): 0
Identify the letter of the choice that best completes the statement or answers the question.
 Chapter 12 - Practice Questions Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. 1) Never remove a radiator cap on a hot engine because a. the
Chapter 12 - Practice Questions Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. 1) Never remove a radiator cap on a hot engine because a. the
UNIT-I (FORCE ANALYSIS)
") DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
Force Questions. Ground
 Force Questions 8. The London Eye is a large wheel which rotates at a slow steady speed in a vertical plane about a fixed horizontal axis. A total of 800 passengers can ride in 32 capsules equally spaced
Force Questions 8. The London Eye is a large wheel which rotates at a slow steady speed in a vertical plane about a fixed horizontal axis. A total of 800 passengers can ride in 32 capsules equally spaced
Engineering Mechanics. Friction in Action
 Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
The prediction of passenger flow under transport disturbance using accumulated passenger data
 Computers in Railways XIV 623 The prediction of passenger flow under transport disturbance using accumulated passenger data T. Kunimatsu & C. Hirai Signalling and Transport Information Technology Division,
Computers in Railways XIV 623 The prediction of passenger flow under transport disturbance using accumulated passenger data T. Kunimatsu & C. Hirai Signalling and Transport Information Technology Division,
Traffic Modelling for Moving-Block Train Control System
 Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
2 - Machining Fundamentals Measurement. Manufacturing Processes - 2, IE-352 Ahmed M El-Sherbeeny, PhD Spring-2015
 2 - Machining Fundamentals Measurement Manufacturing Processes - 2, IE-352 Ahmed M El-Sherbeeny, PhD Spring-2015 Learning Objectives Measure to 1/64 (.5 mm) with a steel rule Reading an Inch-based Vernier
2 - Machining Fundamentals Measurement Manufacturing Processes - 2, IE-352 Ahmed M El-Sherbeeny, PhD Spring-2015 Learning Objectives Measure to 1/64 (.5 mm) with a steel rule Reading an Inch-based Vernier
2.1. Linear motion is a study of moving object in a line. We need a to describe and of objects.
 2.1 Linear motion is a study of moving object in a line. We need a to describe and of objects. 34 Example of reference frames Note: Reference frame is presented by the coordinate system. We frequently
2.1 Linear motion is a study of moving object in a line. We need a to describe and of objects. 34 Example of reference frames Note: Reference frame is presented by the coordinate system. We frequently
Rube-Goldberg Device. Team #1; A1, 4/28/10. Matt Burr, Kayla Stone, Blake Hanson, Alex Denton
 Rube-Goldberg Device Team #1; A1, 4/28/10 Matt Burr, Kayla Stone, Blake Hanson, Alex Denton Introduction The main goal of our team when creating the Rube Goldberg machine was to construct an inefficient
Rube-Goldberg Device Team #1; A1, 4/28/10 Matt Burr, Kayla Stone, Blake Hanson, Alex Denton Introduction The main goal of our team when creating the Rube Goldberg machine was to construct an inefficient
Engineering innovation through Advanced Materials and Technology. A wholly owned subsidiary of The Morgan Crucible Company PLC
 Engineering innovation through Advanced Materials and Technology A wholly owned subsidiary of The Morgan Crucible Company PLC Unraveling the Commutation Mystery DC Machine Basics Machine Adjustments Carbon
Engineering innovation through Advanced Materials and Technology A wholly owned subsidiary of The Morgan Crucible Company PLC Unraveling the Commutation Mystery DC Machine Basics Machine Adjustments Carbon
SKF actuators available for quick delivery. Selection guide
 SKF actuators available for quick delivery Selection guide A wide range of SKF actuators available for quick delivery Industrial actuator 24 Volt DC Load range 1 000 to 4 000 N Speed range 5 to 52 mm/s
SKF actuators available for quick delivery Selection guide A wide range of SKF actuators available for quick delivery Industrial actuator 24 Volt DC Load range 1 000 to 4 000 N Speed range 5 to 52 mm/s
End-of-Chapter Exercises
 End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
Flywheels-Function need and Operation
 STUDY OF FLYWHEEL Flywheel definition A flywheel is an inertial energy-storage device. It absorbs mechanical energy and serves as a reservoir, storing energy during the period when the supply of energy
STUDY OF FLYWHEEL Flywheel definition A flywheel is an inertial energy-storage device. It absorbs mechanical energy and serves as a reservoir, storing energy during the period when the supply of energy
Analysis of Friction-Induced Vibration Leading to Eek Noise in a Dry Friction Clutch. Abstract
 The 22 International Congress and Exposition on Noise Control Engineering Dearborn, MI, USA. August 19-21, 22 Analysis o Friction-Induced Vibration Leading to Eek Noise in a Dry Friction Clutch P. Wickramarachi
The 22 International Congress and Exposition on Noise Control Engineering Dearborn, MI, USA. August 19-21, 22 Analysis o Friction-Induced Vibration Leading to Eek Noise in a Dry Friction Clutch P. Wickramarachi
Product Description. Further highlights. Outstanding features. 4 Bosch Rexroth Corporation Miniature Linear Modules R310A 2418 (2009.
 4 Bosch Rexroth orporation Miniature Linear Modules R310A 2418 (2009.05) Product Description Outstanding features Rexroth Miniature Linear Modules are precise, ready-to-install linear motion systems that
4 Bosch Rexroth orporation Miniature Linear Modules R310A 2418 (2009.05) Product Description Outstanding features Rexroth Miniature Linear Modules are precise, ready-to-install linear motion systems that
PHYSICS LAB. Newton's Law. Date: GRADE: PHYSICS DEPARTMENT JAMES MADISON UNIVERSITY
 PHYSICS LAB Newton's Law Printed Names: Signatures: Date: Lab Section: Instructor: GRADE: PHYSICS DEPARTMENT JAMES MADISON UNIVERSITY Revision August 2003 NEWTON S SECOND LAW Purpose: 1. To become familiar
PHYSICS LAB Newton's Law Printed Names: Signatures: Date: Lab Section: Instructor: GRADE: PHYSICS DEPARTMENT JAMES MADISON UNIVERSITY Revision August 2003 NEWTON S SECOND LAW Purpose: 1. To become familiar
Reference Guide. Science Reference 9/25/ Copyright 1996 Gary Lewis Revisions 2007 by John Pratte
 Reference Guide Contents...1 1. General Scientific Terminology...2 2. Types of Errors...3 3. Scientific Notation...4 4. Significant Figures...6 5. Graphs...7 6. Making Measurements...8 7. Units...9 8.
Reference Guide Contents...1 1. General Scientific Terminology...2 2. Types of Errors...3 3. Scientific Notation...4 4. Significant Figures...6 5. Graphs...7 6. Making Measurements...8 7. Units...9 8.
BULOVA MODELS. Selfwinding and. Watches. Specifications 12EBA 12 EBAD 12 ECAD 12 EBACD 12 ECACD. . i -... ~.~.. '. Movement: Self-winding mechanism
 DIAL SIDE TRAIN SIDE BULOVA MODELS Scale 1:1 12EBA 12 EBAD 12 ECAD Selfwinding and Selfwinding Watches 12 EBAC 12 EBACD 12 ECACD Date Specifications Movement: Self-winding mechanism 12'12'" lever escapement.
DIAL SIDE TRAIN SIDE BULOVA MODELS Scale 1:1 12EBA 12 EBAD 12 ECAD Selfwinding and Selfwinding Watches 12 EBAC 12 EBACD 12 ECACD Date Specifications Movement: Self-winding mechanism 12'12'" lever escapement.
Webreview Torque and Rotation Practice Test
 Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
KEY CONCEPTS AND PROCESS SKILLS
 Measuring 74 40- to 2-3 50-minute sessions ACTIVITY OVERVIEW L A B O R AT O R Y Students use a cart, ramp, and track to measure the time it takes for a cart to roll 100 centimeters. They then calculate
Measuring 74 40- to 2-3 50-minute sessions ACTIVITY OVERVIEW L A B O R AT O R Y Students use a cart, ramp, and track to measure the time it takes for a cart to roll 100 centimeters. They then calculate
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
4.2. Visualize: Assess: Note that the climber does not touch the sides of the crevasse so there are no forces from the crevasse walls.
 4.1. Solve: A force is basically a push or a pull on an object. There are five basic characteristics of forces. (i) A force has an agent that is the direct and immediate source of the push or pull. (ii)
4.1. Solve: A force is basically a push or a pull on an object. There are five basic characteristics of forces. (i) A force has an agent that is the direct and immediate source of the push or pull. (ii)
Unit 7 Trigonometry Project Name Key Project Information
 Unit 7 Trigonometry Project Name Key Project Information What is it? This project will be a series of tasks that you must complete on your own. Specific instructions are given for each task, but all must
Unit 7 Trigonometry Project Name Key Project Information What is it? This project will be a series of tasks that you must complete on your own. Specific instructions are given for each task, but all must
Work, Power, & Machines
 Work, Power, & Machines 1 What is work? To many people, the word work means something they do to earn money. The word work also means exerting a force with your muscles. 1 What is work? Someone might say
Work, Power, & Machines 1 What is work? To many people, the word work means something they do to earn money. The word work also means exerting a force with your muscles. 1 What is work? Someone might say
Identification system for short product names. Changes/amendments at a glance. 2 Bosch Rexroth AG OBB omega modules R ( )
") Omega Modules OBB 2 OBB omega modules R9990079 (206-05) Identification system for short product names Short product name Example: O B B - 085 - N N - System = Omega module Guideway = Ball Rail System Drive
Omega Modules OBB 2 OBB omega modules R9990079 (206-05) Identification system for short product names Short product name Example: O B B - 085 - N N - System = Omega module Guideway = Ball Rail System Drive
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
CV3000 Series. Characterized Insert Control Valves
 CV3000 Series Characterized Insert Control Valves The CV3000 Series is a v-type control valve for precise control allowing high pressure drop capability with straight-through flow and bubble-tight shut
CV3000 Series Characterized Insert Control Valves The CV3000 Series is a v-type control valve for precise control allowing high pressure drop capability with straight-through flow and bubble-tight shut
IN RE INVESTIGATION OF AN ACCIDENT WHICH OCCURRED ON THE UNION PACIFIC RAILROAD AT MENOKEN; KANS., ON JULY 24, 1930.
 IN RE INVESTIGATION OF AN ACCIDENT WHICH OCCURRED ON THE UNION PACIFIC RAILROAD AT MENOKEN; KANS., ON JULY 24, 1930. On July 24, 1930, there was a rear-end collision between two freight trains on the Union
IN RE INVESTIGATION OF AN ACCIDENT WHICH OCCURRED ON THE UNION PACIFIC RAILROAD AT MENOKEN; KANS., ON JULY 24, 1930. On July 24, 1930, there was a rear-end collision between two freight trains on the Union
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Final Project Physics 590. Mary-Kate McGlinchey MISEP Summer 2005
 Final Project Physics 590 Mary-Kate McGlinchey MISEP Summer 2005 Lesson Objectives: Students will be able to Identify the relationship between motion and a reference point. Identify the two factors that
Final Project Physics 590 Mary-Kate McGlinchey MISEP Summer 2005 Lesson Objectives: Students will be able to Identify the relationship between motion and a reference point. Identify the two factors that
Physics 12. Unit 5 Circular Motion and Gravitation Part 1
 Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
Remove this sheet AFTER the exam starts and place your name and section on the next page.
 EF 151 Final Exam, Spring, 2014 Page 1 of 10 Remove this sheet AFTER the exam starts and place your name and section on the next page. Instructions: Guidelines: Do not open the test until you are told
EF 151 Final Exam, Spring, 2014 Page 1 of 10 Remove this sheet AFTER the exam starts and place your name and section on the next page. Instructions: Guidelines: Do not open the test until you are told
Section 1: Work and Power. Section 2: Using Machines. Section 3: Simple Machines
 Table of Contents Chapter: Work and Simple Machines Section 1: Work and Power Section 2: Using Machines Section 3: Simple Machines 1 Work and Power What is work? Work is done when a force causes an object
Table of Contents Chapter: Work and Simple Machines Section 1: Work and Power Section 2: Using Machines Section 3: Simple Machines 1 Work and Power What is work? Work is done when a force causes an object