2.152 Course Notes Contraction Analysis MIT, 2005
|
|
|
- Aubrey Adams
- 6 years ago
- Views:
Transcription
1 2.152 Course Notes Contraction Analysis MIT, 2005 Jean-Jacques Slotine
2 Contraction Theory ẋ = f(x, t) If Θ(x, t) such that, uniformly x, t 0, F = ( Θ + Θ f x )Θ 1 < 0 Θ(x, t) T Θ(x, t) > 0 then all solutions converge exponentially to a single trajectory, independently of the initial conditions. Proof: Consider virtual displacements, δx = x(t,x o) x o δz = Θδx 1 2 dx o d dt δz 2 λ F δz 2 and path integration at fixed time.
3 Observer Lorenz attractor ẋ = σ (y x) ẏ = ρ x y x z ż = β z + x y Observer { ŷ = ρ x ŷ x ẑ ẑ = β ẑ + x ŷ J = [ 1 x x β ] < 0

4 One-Way Coupling { ẋ 1 = f(x 1, t) ẋ 2 = f(x 2, t) + u(x 1 ) u(x 2 ) If f u is contracting in an input-independent metric, then x 2 x 1 exponentially regardless of initial conditions. Extends to networks with chain or tree structure.
5 Combinations of Contracting Systems Parallel d dt δz = i α i (t) d dt δz i with α i (t) > 0, same metric Hierarchies ( ) d δz1 dt δz 2 = ( ) ( ) F1 0 δz1 F 2 δz 2 G 2 with G 2 bounded Feedback ( ) d δz1 dt δz 2 = ( ) ( ) F1 G 1 δz1 F 2 δz 2 G 2 with λ(f 1 ) λ(f 2 ) > 1 4 min K>0 σ2 (KG 1 + G T 2 ) uniformly
6 Translation and Scaling in Space and Time Multiresolutions Contracting mother system ẋ = f(x, t), constant metric. Then ẋ = f(a i (t)x b i (t), t) is contracting in the same metric, for any b i (t) and any a i (t) > 0 uniformly. So is ẋ = i α i (t) f(a i (t)x b i (t), t) for any uniformly positive α i (t). May in turn obtain α i (t) from hierarchy. So is ɛ(t) ẋ = i α i (t) f(a i (t)x b i (t), β i (t)) with ɛ(t) > 0, β i (t) 0.
7 Smooth nonlinear maps y = g(x 1,..., x n,t) where the x i are states of contracting systems (of possibly different metrics). Then δy 0 exponentially as long as all y x i are bounded. Similarly, given a contracting system of state x, boundedness of all J (i) up to order j implies exponential convergence to zero of all δx (i) up to order j + 1. The nonlinear maps may depend accordingly on time-derivatives of the x i. Any combination of all of the above
8 Parallel Combinations Control Primitives Dynamics f and primitives φ i all contracting in the same Θ(x) ẋ = f(x, t) + i α i (t) φ i (x, t) α i (t) > 0 More generally ẋ = f(x, t) + B(x, t) u Assume control primitives u = p i (x, t) make the closed-loop system contracting in common metric, i. Then any convex combination u = α i (t) p i (x, t) α i (t) 0 α i (t) = 1 i i yields a contracting dynamics in the same metric.
9 Hierarchies Composite Variables ṡ = φ(s, t) contracting by choice of control law x + λ x = s contracting by definition of s Qualitative dynamics. For instance, react faster to larger errors x x+(λ 1 +λ 2 x ) x = s x = (λ 1 +2λ 2 x ) More generally x (n) = f(x, ẋ,..., x (n 1), u, t) Target contracting system x (n) = g(x, ẋ,..., x (n 1), t) Choosing s = x (n 1) x (n 1) r d dt x(n 1) r = k s + g yields g = ṡ + k s x (n)
10 Hierarchies Motor Primitives (again) ẋ = f(x, t) + i α i (t) φ i (x, t) The α i (t) could be outputs of contracting systems higher up Periodic α i (t) lead to periodic x
11 Adaptive Combinations z = f(z, t) f(z d, t) W(z, t)ã z(t) = z(t) z d (t) â = PW T (z, t) z ã(t) = â(t) a V = d dt ( zt z + ã T P 1 ã ) = 2 z T 1 o f z (z d + λ z)dλ z Local adaptation loops: Overall sytem is nominal contracting network, driven by terms W(z, t)ã 0 Exploit physics W c (z, t)a c W(z, t)a = W c (z, t)a c + W o (z, t)a o is contracting in the same metric as f Use W c (z d, t) in place of W c (z, t) in the adaptation V = 2 z T 1 o f c z (z d + λ z)dλ z f c = f + W c a c
12 Partial Contraction Consider a nonlinear system in the form ẋ = f(x, x, t) and assume that the auxiliary system ẏ = f(y, x, t) is contracting. If a particular solution of the auxiliary system verifies a smooth specific property, then all trajectories of the original system verify this property exponentially. Proof: Another particular solution of the auxiliary system is y(t) = x(t), t 0.
13 Typically, contraction analysis not based on error signal. Rather, show closed-loop contraction, x d (t) particular solution (control) observer contraction, x(t) particular solution (estimation) More generally partial contraction, virtual contracting system such that x(t) and x d (t) are particular solutions (controller) ˆx(t) and x(t) are particular solutions (observer) Other forms of synchronization
 contracting then x 1 and x 2 converge exponentially regardless of")
14 Two-Way Coupling If the dynamics equations verify ẋ 1 h(x 1, t) = ẋ 2 h(x 2, t) with, in an input-independent metric, h(x, t) contracting then x 1 and x 2 converge exponentially regardless of initial conditions.
15 Proof: Define ẋ 1 h(x 1, t) = ẋ 2 h(x 2, t) = g(x 1, x 2, t) Construct an auxiliary system ẏ = h(y, t) + g(x 1, x 2, t) Two particular solutions y = x 1 (t) y = x 2 (t)
16 Example: Van der Pol oscillators { ẍ 1 + α(x 2 1 1)ẋ 1 + ω 2 x 1 = ακ 1 (ẋ 2 ẋ 1 ) ẍ 2 + α(x 2 2 1)ẋ 2 + ω 2 x 2 = ακ 2 (ẋ 1 ẋ 2 ) ẍ 1 +α(x κ 1 + κ 2 1)ẋ 1 +ω 2 x 1 = ẍ 2 +α(x κ 1 + κ 2 1)ẋ 2 +ω 2 x 2 Synchronize if κ 1 + κ 2 > 1
17 Feedback-induced oscillations Diffusion-driven instability Alan Turing, 1952 Stephen Smale, 1976 { ẍ 1 + α(x κ 1)ẋ 1 + ω 2 x 1 = ακ(ẋ 2 ẋ 1 ) ẍ 2 + α(x κ 1)ẋ 2 + ω 2 x 2 = ακ(ẋ 1 ẋ 2 ) can be written { ẍ 1 + α(x 2 1 1)ẋ 1 + ω 2 x 1 = ακ(ẋ 2 + ẋ 1 ) ẍ 2 + α(x 2 2 1)ẋ 2 + ω 2 x 2 = ακ(ẋ 1 + ẋ 2 ) so that x 2 and x 1 synchronize, for κ > 1 2.
18 { Feedback-induced oscillations ẍ 1 + α(x κ 1)ẋ 1 + ω 2 x 1 = ακ(ẋ 2 ẋ 1 ) ẍ 2 + α(x κ 1)ẋ 2 + ω 2 x 2 = ακ(ẋ 1 ẋ 2 ) Anti-synchronize if κ > 1 2
19 FitzHugh-Nagumo (1963) A classical model of spiking neurons, Hodgkin-Huxley { v = c(v + w 1 3 v3 + I) ẇ = 1 (v a + bw) c simplification of Defining Θ = [ c ] leads to generalized Jacobian F = [ c(1 v2 ) 1 1 b c ] Use coupling in v
20 Izhikevich (2004) A richer simplification of Hodgkin-Huxley { v = 0.04v 2 + 5v u + I u = a (b v u) with explicit after-spike resetting If v +30mV, then { v c u u + d Different qualitative responses based on parameter values
21
22 Analysis { v = 0.04v 2 + 5v u + I u = a (b v u) If v +30mV, then { v c u u + d Defining Θ = [ ] ab leads to generalized Jacobians F = [ ] 0.08v + 5 ab ab a F = [ ] Use coupling in v
23 Generalized Networks Consider a network of n identical systems ẋ i = f(x i, t) j N i K ji (x i x j ) Construct an auxiliary system ẏ i = f(y i, t) j N i K ji (y i y j ) K 0 Synchronization condition n y j + K 0 j=1 n x j (t) j=1 λ m+1 (L) > max i λ max (J is ) uniformly λ m+1 is first nonzero eigenvalue of coupling matrix L. That is, K 0 > 0, and K ij = K ji > 0, i, j N the network is connected λ max (J is ) is bounded and couplings are strong enough
24 Switching Networks Models of schooling fish, flocking birds, cooperating vehicles δz T δz decreases exponentially although derivative may be discontinous
25 Toy version of the proof Continuous Vicsek ẋ i = K (x i x j ) j N i (t) Auxiliary system ẏ i = K (y i y j ) K j N i (t) n (y j x j ) j=1 is contracting for K > 0 since v T J v = v j v i 2 K active links n v i 2 K i=1
26 Nonlinear couplings ẋ i = f(x i, t) + j N i u ji ( x j x i, x, t ) u ji (0, x, t) = 0 Conditions now apply to K ji = u ji ( x j x i, x, t ) (x j x i ). Such systems can be written, without loss of generality, as ẋ i = f(x i, t) + j N i K ji (x, t ) (x j x i ) Conditions apply directly to K = K(x, t ), as seen from ẏ i = f(y i, t) j N i K ji (x, t ) (y i y j ) K 0 n y j + K 0 j=1 n x j (t) j=1 For instance u ji = ( C ji (t) + L ji (t) x j x i ) (x j x i )
27 Positive semi-definite couplings K ijs = [ K ijs ] J is = [ ] J11s J 12 J T 12 J 22s i Sufficient condition for synchronization for large enough K ijs i, J 22s < 0 and λ max (J 11s ), σ max (J 12 ) bounded
28 Improve Synchronization Process Increasing the coupling gain for a link Adding an extra link..... K K..... K K.....
29 Graph Laplacian L = T K T = diag( j k ij) For an undirected graph, L is symmetric positive definite Graph diameter D, maximum distance (number of links) Mean distance ρ Standard results on D and ρ translate into sufficient conditions for synchronization where D < 4 nα or ρ < α = max i λ max (J is ) λ min (K) 2 α(n 1) + n 2 2(n 1)
30 Networks with Different Structures With n one-way ring structure λ min (K) O(n 2 ) + star structure λ min (K) O(1) all-to-all structure λ min (K) O( 1 n ) 0 Specifically, λ min (K) ring 4 λ min (K) open chain
31 Leader Following ẋ 0 = f(x 0, t) = f(x i, t) + ẋ i j N i (t) Global convergence to x 0 (γ i (t) = 0, 1 K ji (x j x i ) + γ i K 0i (x 0 x i ) i γ i(t) 1 t ) Different leaders x j 0 of arbitrary dynamics can define different group primitives which can be combined. Contraction of the followers dynamics (i = 1,..., n) ẋ i = f(x i, t) + j N i K ji (x j x i ) + j α j (t) γ j i K j 0i (x j 0 x i ) is preserved if α j (t) 1 t 0 j For subsystems with different dynamics, can combine MITwith knowledge leaders through local adaptation mechanisms.
32 Fast Inhibition ẋ i = f(x i, t) + j N i K ji (x j x i ) i = 1,..., n A single inhibitory link between two arbitrary elements has the ability to turn off the entire network. ẋ a = f(x a, t) + K ja (x j x a ) + K ( x b x a ) j N a ẋ b = f(x b, t) + K jb (x j x b ) + K ( x a x b ) j N b
33 Fast Inhibition t
34 Concurrent Synchronization Under simple conditions on the coupling strengths, the group globally exponentially synchronizes, thus providing synchronized inputs to the outer elements. So does the group. Regardless of the dynamics, connections, or inputs of the other systems. "As stable" as global exponential convergence to an equilibrium. But now to a possibly very complex coordinated behavior. The invariance itself (but not the convergence) is closely related to the notion of input-symmetry. Evolution-friendly.

35 Global exponential concurrent synchronization = Contraction to a flow-invariant linear subspace Simple conditions based on Jacobians Combination properties
36 Contraction to a Linear Subspace Theorem Consider a linear subspace M invariant for ẋ = f(x, t), let V be the orthornormal projection on M. If V ( f x) V < 0 uniformly, then all solutions converge exponentially to M. More generally, with metric Θ(x, t) Θ(x, t) on M, if ( F = Θ + ΘV f ) x V Θ 1 < 0 uniformly Proof With V V + U U = I and z = Vx, ż = Vf(V z + U Ux, t) The auxiliary contracting system ẏ = Vf(V y + U Ux, t) has y(t) = z(t) and y(t) = 0 as particular solutions.
37 For instance, for a system of the form ẋ {} = f {} (x {} ) Lx {} global exponential sync to linear invariant subspace M if [ ] λ min (VL s V f{} (x {}, t) ) > sup λ max x {},t x {} s Note percolation effect M A M B M A M B λ min (V A J s V A) λ min (V B J s V B) For identical systems subsystems and diffusion couplings [ ] f(x, t) λ min (VL s V ) > sup λ max x,t x as before, and simple extensions. s
38 Balanced diffusive networks A balanced network is a directed diffusive network which verifies for each node i j i K ij = j i K ji Because of this property, the symmetric part of its Laplacian matrix is itself the Laplacian matrix of a well-defined undirected graph. Thus, the positive definiteness of VLV is equivalent to the connectedness of the underlying undirected graph. For general networks, compute directly whether VL s V > 0.
39 Generalized diffusive connections { ẋ1 = f 1 (x 1, t) + ka (Bx 2 Ax 1 ) ẋ 2 = f 2 (x 2, t) + kb (Ax 1 Bx 2 ) where x 1 and x 2 can be of different dimensions, and A and B are constant matrices of appropriate dimensions. ( f1 ) ( ) x A J = 1 A A f 2 kl, where L = B x 2 B A B B L = L T 0 since ( ( ) ) x1 x 1 x 2 L = Ax x 1 Bx Assume that the subspace M : Ax 1 Bx 2 = 0 is flowinvariant. Using the projection V on M (so VLV > 0), for upper bounded individual Jacobians, large enough k ensures exponential convergence to M. By recursion for larger systems.
40 Excitatory-only networks { ẋ1 = f(x 1, t) + kx 2 ẋ 2 = f(x 2, t) + kx 1 J = ( f(x1,t) x 1 0 f(x 0 2,t) x 2 ) + k ( ) span{(1, 1)} is flow-invariant, with V = 1 2 (1 1) The projected Jacobian is 1 2 ( f(x 1,t) x 1 + f(x 2,t) x 2 ) k. Exponential synchronization for k > sup x,t f x. In the case of diffusive connections, once the elements are synchronized, the coupling terms disappear, so that each individual element exhibits its natural, uncoupled behaviour. This is not the case with excitatory-only connections.
41 COMBINATIONS OF CONCURRENTLY SYNCHRONIZING GROUPS Under mild conditions, global convergence to a concurrently synchronized regime is preserved under basic system combinations such as parallel, negative feedback, and hierarchies. As a result, stable concurrently synchronized aggregates of arbitrary size can be constructed. Reflects combination properties of contracting systems.
42 Input-symmetry preservation assumption Two independent groups G i of dynamical elements, each with a flow-invariant subspace M i, with V i (J i ) s V i < 0. Connect the elements of G 1 to the elements of G 2 while preserving input-symmetry for each group. Then, M 1 M 2 remains a flow-invariant subspace of the new global space. The projection on (M 1 M 2 ) is V = ( ) V V 2 where V i has been rescaled into V i for orthonormality. All results extend by recursion to combinations of arbitrary size.
43 Negative Feedback ( ) J1 kj J = 12 J 12 J 2 Metric Θ(x, t) Θ(x, t) = k > 0 ( I 0 0 ki ) on (M 1 M 2 ) Generalized projected Jacobian ( V Θ(VJV )Θ 1 = 1 J 1 V 1 k 1 V 1( kj 12)V 2 kv 2 J 12 V 1 V 2J 2 V 2 ) < 0
44 Hierarchies J = ( ) J1 0 J 12 J 2 Metric Θ(x, t) Θ(x, t) = ( I 0 0 ɛ 2 I ) on (M 1 M 2 ) Generalized projected Jacobian ( V Θ(VJV )Θ 1 = 1 J 1 V 1 0 ɛv 2J 12 V 1 V 2J 2 V 2 for bounded V 2J 12 V 1. ) < 0
45 Parallel V [ i α i(t)(j i ) s ] V = i α i(t) [V (J i ) s V ] Note superposition of different dynamics within one group. For instance, assume that for a given system ẋ = f(x, t), several types of additive couplings L i (x, t) lead stably to the same invariant set, but to different synchronized behaviors. Then any convex combination ( α i (t) 0, α i i(t) = 1 ) of the couplings will lead stably to the same invariant set. Indeed, f(x, t) i α i (t) L i (x, t) = i α i (t) [ f(x, t) L i (x, t) ] < 0 The L i (x, t) can be viewed as synchronization primitives to shape the final behavior of the combination.
46 Building concurrent synchronization one system at a time Connect single dynamics G 1 to all other elements G 2. Input-symmetry is preserved for each aspiring sync subgroup of G 2 if 1 2 connections are identical for each element. Modifying 2 1 connections does not alter input-symmetry. (M 1 M 2 ) = M 2, so concurrent synchronization and convergence rate of the combined system only depend on the parameters and states of G 2. For diffusion couplings, the projected Jacobian is V 2 ( J ind 2 K 1 2 L int ) V 2 so increase either K 1 2 or L int.
47 EXAMPLE: COINCIDENCE DETECTION, SEGMENTATION Global excitatory neuron o O... O O O FN neurons I 1 I 2 I n 1 I n
48
49 EXAMPLE: SYMMETRY DETECTION


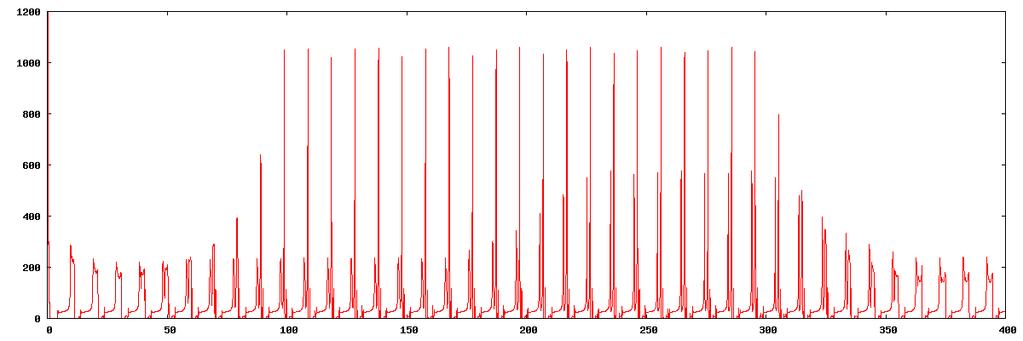
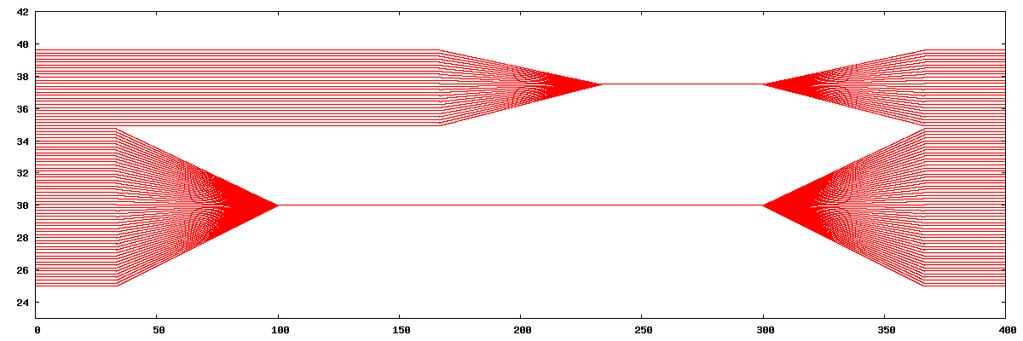
50 56 60 symmetric image 21 FN pairs on first layer, sum 8 8 inputs. At t = T/2, the window is exactly at the center of the image. v2 v1 on top layer
51 Example: Locomotion Central Pattern Generators modelled as coupled nonlinear oscillators delivering phase-locked signals. Coupled Andronov-Hopf oscillators (constant ρ, θ limit cycle) ẋ 1 = f(x 1 ) + k(rx 2 x 1 ) ẋ 2 = f(x 2 ) + k(rx 3 x 2 ) f = ( ) x y x3 xy 2 x + y y 3 yx 2 ẋ 3 = f(x 3 ) + k(rx 1 x 3 ) ( 1 R = The linear subspace M = {(R 2 (x), R(x), x) : x R 2 } is flow-invariant, and is also a subset of Null(L s ), where ) = 2π 3 rotation ẋ {} = f {} (x {} ) k Lx {} MIT The characteristic polynomial of L s is X 2 (X 3/2 )
52 The characteristic polynomial of L s is X 2 (X 3/2 ) 4. Since M is 2-dimensional, it is exactly the nullspace of L s. This implies in turn that M is the eigenspace corresponding to the eigenvalue 3/2. The eigenvalues of J s (x, y) are 1 (x 2 +y 2 ) and 1 3(x 2 +y 2 ), which are upper-bounded by 1. Thus, for k > 2/3, global exponential convergence to a ± 2π -phase-locked state. 3 Can be easily generalized to larger systems, gait primitives.
53 Extensions Not symmetric ẋ 1 = f(x 1 ) + k 1 (R 1 x 2 x 1 ) ẋ 2 = f(x 2 ) + k 2 (R 2 x 3 x 2 ) ẋ 3 = f(x 3 ) + k 3 (R 3 x 1 x 3 ) with arbitrary phase-locking R 1 R 2 R 3 = I 2. Not diffusive ẋ 1 = f(x 1 ) + krx 2 ẋ 2 = f(x 2 ) + krx 3 ẋ 3 = f(x 3 ) + krx 1 The limit cycle s radius varies with k. Larger systems, gait primitives.
Stable Concurrent Synchronization in Dynamic System Networks
 Stable Concurrent Synchronization in Dynamic System Networks Quang-Cuong Pham a Jean-Jacques Slotine b a Département d Informatique, École Normale Supérieure, 45 rue d Ulm, 755 Paris, France b Nonlinear
Stable Concurrent Synchronization in Dynamic System Networks Quang-Cuong Pham a Jean-Jacques Slotine b a Département d Informatique, École Normale Supérieure, 45 rue d Ulm, 755 Paris, France b Nonlinear
On Partial Contraction Analysis for Coupled Nonlinear Oscillators
 On Partial Contraction Analysis for Coupled Nonlinear Oscillators Wei Wang and Jean-Jacques E. Slotine Nonlinear Systems Laboratory Massachusetts Institute of Technology Cambridge, Massachusetts, 0139,
On Partial Contraction Analysis for Coupled Nonlinear Oscillators Wei Wang and Jean-Jacques E. Slotine Nonlinear Systems Laboratory Massachusetts Institute of Technology Cambridge, Massachusetts, 0139,
Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems
 IEEE TRANSACTIONS ON ROBOTICS Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques Slotine Abstract Concurrent synchronization is
IEEE TRANSACTIONS ON ROBOTICS Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques Slotine Abstract Concurrent synchronization is
DISTRIBUTED and decentralized synchronization of large
 686 IEEE TRANSACTIONS ON ROBOTICS, VOL. 25, NO. 3, JUNE 2009 Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques E. Slotine Abstract
686 IEEE TRANSACTIONS ON ROBOTICS, VOL. 25, NO. 3, JUNE 2009 Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques E. Slotine Abstract
Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems
 Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques Slotine arxiv:7.79v [math.oc 8 Nov 8 Abstract Concurrent synchronization is
Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems Soon-Jo Chung, Member, IEEE, and Jean-Jacques Slotine arxiv:7.79v [math.oc 8 Nov 8 Abstract Concurrent synchronization is
Cooperative Robot Control and Synchronization of Lagrangian Systems
 Cooperative Robot Control and Synchronization of Lagrangian Systems Soon-Jo Chung and Jean-Jacques E. Slotine Abstract arxiv:7.79v [math.oc] Dec 7 This article presents a simple synchronization framework
Cooperative Robot Control and Synchronization of Lagrangian Systems Soon-Jo Chung and Jean-Jacques E. Slotine Abstract arxiv:7.79v [math.oc] Dec 7 This article presents a simple synchronization framework
Stability and Robustness Analysis of Nonlinear Systems via Contraction Metrics and SOS Programming
 arxiv:math/0603313v1 [math.oc 13 Mar 2006 Stability and Robustness Analysis of Nonlinear Systems via Contraction Metrics and SOS Programming Erin M. Aylward 1 Pablo A. Parrilo 1 Jean-Jacques E. Slotine
arxiv:math/0603313v1 [math.oc 13 Mar 2006 Stability and Robustness Analysis of Nonlinear Systems via Contraction Metrics and SOS Programming Erin M. Aylward 1 Pablo A. Parrilo 1 Jean-Jacques E. Slotine
LMI Methods in Optimal and Robust Control
 LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
Examples include: (a) the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling
 the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling") 1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
Multi-Robotic Systems
 CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
1 The Observability Canonical Form
 NONLINEAR OBSERVERS AND SEPARATION PRINCIPLE 1 The Observability Canonical Form In this Chapter we discuss the design of observers for nonlinear systems modelled by equations of the form ẋ = f(x, u) (1)
NONLINEAR OBSERVERS AND SEPARATION PRINCIPLE 1 The Observability Canonical Form In this Chapter we discuss the design of observers for nonlinear systems modelled by equations of the form ẋ = f(x, u) (1)
Stabilization and Passivity-Based Control
 DISC Systems and Control Theory of Nonlinear Systems, 2010 1 Stabilization and Passivity-Based Control Lecture 8 Nonlinear Dynamical Control Systems, Chapter 10, plus handout from R. Sepulchre, Constructive
DISC Systems and Control Theory of Nonlinear Systems, 2010 1 Stabilization and Passivity-Based Control Lecture 8 Nonlinear Dynamical Control Systems, Chapter 10, plus handout from R. Sepulchre, Constructive
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
1. Find the solution of the following uncontrolled linear system. 2 α 1 1
 Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Nonlinear Systems Theory
 Nonlinear Systems Theory Matthew M. Peet Arizona State University Lecture 2: Nonlinear Systems Theory Overview Our next goal is to extend LMI s and optimization to nonlinear systems analysis. Today we
Nonlinear Systems Theory Matthew M. Peet Arizona State University Lecture 2: Nonlinear Systems Theory Overview Our next goal is to extend LMI s and optimization to nonlinear systems analysis. Today we
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Course Summary Math 211
 Course Summary Math 211 table of contents I. Functions of several variables. II. R n. III. Derivatives. IV. Taylor s Theorem. V. Differential Geometry. VI. Applications. 1. Best affine approximations.
Course Summary Math 211 table of contents I. Functions of several variables. II. R n. III. Derivatives. IV. Taylor s Theorem. V. Differential Geometry. VI. Applications. 1. Best affine approximations.
Topic # /31 Feedback Control Systems. Analysis of Nonlinear Systems Lyapunov Stability Analysis
 Topic # 16.30/31 Feedback Control Systems Analysis of Nonlinear Systems Lyapunov Stability Analysis Fall 010 16.30/31 Lyapunov Stability Analysis Very general method to prove (or disprove) stability of
Topic # 16.30/31 Feedback Control Systems Analysis of Nonlinear Systems Lyapunov Stability Analysis Fall 010 16.30/31 Lyapunov Stability Analysis Very general method to prove (or disprove) stability of
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
Chap. 3. Controlled Systems, Controllability
 Chap. 3. Controlled Systems, Controllability 1. Controllability of Linear Systems 1.1. Kalman s Criterion Consider the linear system ẋ = Ax + Bu where x R n : state vector and u R m : input vector. A :
Chap. 3. Controlled Systems, Controllability 1. Controllability of Linear Systems 1.1. Kalman s Criterion Consider the linear system ẋ = Ax + Bu where x R n : state vector and u R m : input vector. A :
d(x n, x) d(x n, x nk ) + d(x nk, x) where we chose any fixed k > N
 d(x n, x nk ) + d(x nk, x) where we chose any fixed k > N") Problem 1. Let f : A R R have the property that for every x A, there exists ɛ > 0 such that f(t) > ɛ if t (x ɛ, x + ɛ) A. If the set A is compact, prove there exists c > 0 such that f(x) > c for all x
Problem 1. Let f : A R R have the property that for every x A, there exists ɛ > 0 such that f(t) > ɛ if t (x ɛ, x + ɛ) A. If the set A is compact, prove there exists c > 0 such that f(x) > c for all x
Chimera states in networks of biological neurons and coupled damped pendulums
 in neural models in networks of pendulum-like elements in networks of biological neurons and coupled damped pendulums J. Hizanidis 1, V. Kanas 2, A. Bezerianos 3, and T. Bountis 4 1 National Center for
in neural models in networks of pendulum-like elements in networks of biological neurons and coupled damped pendulums J. Hizanidis 1, V. Kanas 2, A. Bezerianos 3, and T. Bountis 4 1 National Center for
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
Graph Theoretic Methods in the Stability of Vehicle Formations
 Graph Theoretic Methods in the Stability of Vehicle Formations G. Lafferriere, J. Caughman, A. Williams gerardol@pd.edu, caughman@pd.edu, ancaw@pd.edu Abstract This paper investigates the stabilization
Graph Theoretic Methods in the Stability of Vehicle Formations G. Lafferriere, J. Caughman, A. Williams gerardol@pd.edu, caughman@pd.edu, ancaw@pd.edu Abstract This paper investigates the stabilization
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
High-Gain Observers in Nonlinear Feedback Control. Lecture # 2 Separation Principle
 High-Gain Observers in Nonlinear Feedback Control Lecture # 2 Separation Principle High-Gain ObserversinNonlinear Feedback ControlLecture # 2Separation Principle p. 1/4 The Class of Systems ẋ = Ax + Bφ(x,
High-Gain Observers in Nonlinear Feedback Control Lecture # 2 Separation Principle High-Gain ObserversinNonlinear Feedback ControlLecture # 2Separation Principle p. 1/4 The Class of Systems ẋ = Ax + Bφ(x,
Output Feedback and State Feedback. EL2620 Nonlinear Control. Nonlinear Observers. Nonlinear Controllers. ẋ = f(x,u), y = h(x)
, y = h(x)") Output Feedback and State Feedback EL2620 Nonlinear Control Lecture 10 Exact feedback linearization Input-output linearization Lyapunov-based control design methods ẋ = f(x,u) y = h(x) Output feedback:
Output Feedback and State Feedback EL2620 Nonlinear Control Lecture 10 Exact feedback linearization Input-output linearization Lyapunov-based control design methods ẋ = f(x,u) y = h(x) Output feedback:
TEST CODE: PMB SYLLABUS
 TEST CODE: PMB SYLLABUS Convergence and divergence of sequence and series; Cauchy sequence and completeness; Bolzano-Weierstrass theorem; continuity, uniform continuity, differentiability; directional
TEST CODE: PMB SYLLABUS Convergence and divergence of sequence and series; Cauchy sequence and completeness; Bolzano-Weierstrass theorem; continuity, uniform continuity, differentiability; directional
j=1 [We will show that the triangle inequality holds for each p-norm in Chapter 3 Section 6.] The 1-norm is A F = tr(a H A).
![j=1 [We will show that the triangle inequality holds for each p-norm in Chapter 3 Section 6.] The 1-norm is A F = tr(a H A).](/thumbs/88/117636161.jpg "j=1 [We will show that the triangle inequality holds for each p-norm in Chapter 3 Section 6.] The 1-norm is A F = tr(a H A).") Math 344 Lecture #19 3.5 Normed Linear Spaces Definition 3.5.1. A seminorm on a vector space V over F is a map : V R that for all x, y V and for all α F satisfies (i) x 0 (positivity), (ii) αx = α x (scale
Math 344 Lecture #19 3.5 Normed Linear Spaces Definition 3.5.1. A seminorm on a vector space V over F is a map : V R that for all x, y V and for all α F satisfies (i) x 0 (positivity), (ii) αx = α x (scale
x 3y 2z = 6 1.2) 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7
 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7") Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
Bio-Inspired Adaptive Cooperative Control of Heterogeneous Robotic Networks
 Bio-Inspired Adaptive Cooperative Control of Heterogeneous Robotic Networks Insu Chang and Soon-Jo Chung University of Illinois at Urbana-Champaign, Urbana, IL 61801 We introduce a new adaptive cooperative
Bio-Inspired Adaptive Cooperative Control of Heterogeneous Robotic Networks Insu Chang and Soon-Jo Chung University of Illinois at Urbana-Champaign, Urbana, IL 61801 We introduce a new adaptive cooperative
Sec. 1.1: Basics of Vectors
 Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 1. Linear systems Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Linear systems 1.1 Differential Equations 1.2 Linear flows 1.3 Linear maps
B5.6 Nonlinear Systems 1. Linear systems Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Linear systems 1.1 Differential Equations 1.2 Linear flows 1.3 Linear maps
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 57 Outline 1 Lecture 13: Linear System - Stability
Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 57 Outline 1 Lecture 13: Linear System - Stability
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
SOLVABLE VARIATIONAL PROBLEMS IN N STATISTICAL MECHANICS
 SOLVABLE VARIATIONAL PROBLEMS IN NON EQUILIBRIUM STATISTICAL MECHANICS University of L Aquila October 2013 Tullio Levi Civita Lecture 2013 Coauthors Lorenzo Bertini Alberto De Sole Alessandra Faggionato
SOLVABLE VARIATIONAL PROBLEMS IN NON EQUILIBRIUM STATISTICAL MECHANICS University of L Aquila October 2013 Tullio Levi Civita Lecture 2013 Coauthors Lorenzo Bertini Alberto De Sole Alessandra Faggionato
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Practice Problems for Final Exam
 Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Krylov Subspace Methods for Nonlinear Model Reduction
 MAX PLANCK INSTITUT Conference in honour of Nancy Nichols 70th birthday Reading, 2 3 July 2012 Krylov Subspace Methods for Nonlinear Model Reduction Peter Benner and Tobias Breiten Max Planck Institute
MAX PLANCK INSTITUT Conference in honour of Nancy Nichols 70th birthday Reading, 2 3 July 2012 Krylov Subspace Methods for Nonlinear Model Reduction Peter Benner and Tobias Breiten Max Planck Institute
Problem Set 5: Solutions Math 201A: Fall 2016
 Problem Set 5: s Math 21A: Fall 216 Problem 1. Define f : [1, ) [1, ) by f(x) = x + 1/x. Show that f(x) f(y) < x y for all x, y [1, ) with x y, but f has no fixed point. Why doesn t this example contradict
Problem Set 5: s Math 21A: Fall 216 Problem 1. Define f : [1, ) [1, ) by f(x) = x + 1/x. Show that f(x) f(y) < x y for all x, y [1, ) with x y, but f has no fixed point. Why doesn t this example contradict
Control and synchronization in systems coupled via a complex network
 Control and synchronization in systems coupled via a complex network Chai Wah Wu May 29, 2009 2009 IBM Corporation Synchronization in nonlinear dynamical systems Synchronization in groups of nonlinear
Control and synchronization in systems coupled via a complex network Chai Wah Wu May 29, 2009 2009 IBM Corporation Synchronization in nonlinear dynamical systems Synchronization in groups of nonlinear
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Continuous Functions on Metric Spaces
 Continuous Functions on Metric Spaces Math 201A, Fall 2016 1 Continuous functions Definition 1. Let (X, d X ) and (Y, d Y ) be metric spaces. A function f : X Y is continuous at a X if for every ɛ > 0
Continuous Functions on Metric Spaces Math 201A, Fall 2016 1 Continuous functions Definition 1. Let (X, d X ) and (Y, d Y ) be metric spaces. A function f : X Y is continuous at a X if for every ɛ > 0
System Control Engineering 0
 System Control Engineering 0 Koichi Hashimoto Graduate School of Information Sciences Text: Nonlinear Control Systems Analysis and Design, Wiley Author: Horacio J. Marquez Web: http://www.ic.is.tohoku.ac.jp/~koichi/system_control/
System Control Engineering 0 Koichi Hashimoto Graduate School of Information Sciences Text: Nonlinear Control Systems Analysis and Design, Wiley Author: Horacio J. Marquez Web: http://www.ic.is.tohoku.ac.jp/~koichi/system_control/
Contraction Based Adaptive Control of a Class of Nonlinear Systems
 9 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -, 9 WeB4.5 Contraction Based Adaptive Control of a Class of Nonlinear Systems B. B. Sharma and I. N. Kar, Member IEEE Abstract
9 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -, 9 WeB4.5 Contraction Based Adaptive Control of a Class of Nonlinear Systems B. B. Sharma and I. N. Kar, Member IEEE Abstract
Nonlinear Control Systems
 Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 7. Feedback Linearization IST-DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs1/ 1 1 Feedback Linearization Given a nonlinear
Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 7. Feedback Linearization IST-DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs1/ 1 1 Feedback Linearization Given a nonlinear
Exam in TMA4195 Mathematical Modeling Solutions
 Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
LINEAR ALGEBRA BOOT CAMP WEEK 4: THE SPECTRAL THEOREM
 LINEAR ALGEBRA BOOT CAMP WEEK 4: THE SPECTRAL THEOREM Unless otherwise stated, all vector spaces in this worksheet are finite dimensional and the scalar field F is R or C. Definition 1. A linear operator
LINEAR ALGEBRA BOOT CAMP WEEK 4: THE SPECTRAL THEOREM Unless otherwise stated, all vector spaces in this worksheet are finite dimensional and the scalar field F is R or C. Definition 1. A linear operator
Chapter #4 EEE8086-EEE8115. Robust and Adaptive Control Systems
 Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
Problem List MATH 5173 Spring, 2014
 Problem List MATH 5173 Spring, 2014 The notation p/n means the problem with number n on page p of Perko. 1. 5/3 [Due Wednesday, January 15] 2. 6/5 and describe the relationship of the phase portraits [Due
Problem List MATH 5173 Spring, 2014 The notation p/n means the problem with number n on page p of Perko. 1. 5/3 [Due Wednesday, January 15] 2. 6/5 and describe the relationship of the phase portraits [Due
MULTI-AGENT TRACKING OF A HIGH-DIMENSIONAL ACTIVE LEADER WITH SWITCHING TOPOLOGY
 Jrl Syst Sci & Complexity (2009) 22: 722 731 MULTI-AGENT TRACKING OF A HIGH-DIMENSIONAL ACTIVE LEADER WITH SWITCHING TOPOLOGY Yiguang HONG Xiaoli WANG Received: 11 May 2009 / Revised: 16 June 2009 c 2009
Jrl Syst Sci & Complexity (2009) 22: 722 731 MULTI-AGENT TRACKING OF A HIGH-DIMENSIONAL ACTIVE LEADER WITH SWITCHING TOPOLOGY Yiguang HONG Xiaoli WANG Received: 11 May 2009 / Revised: 16 June 2009 c 2009
ACM/CMS 107 Linear Analysis & Applications Fall 2016 Assignment 4: Linear ODEs and Control Theory Due: 5th December 2016
 ACM/CMS 17 Linear Analysis & Applications Fall 216 Assignment 4: Linear ODEs and Control Theory Due: 5th December 216 Introduction Systems of ordinary differential equations (ODEs) can be used to describe
ACM/CMS 17 Linear Analysis & Applications Fall 216 Assignment 4: Linear ODEs and Control Theory Due: 5th December 216 Introduction Systems of ordinary differential equations (ODEs) can be used to describe
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Nonlinear equations. Norms for R n. Convergence orders for iterative methods
 Nonlinear equations Norms for R n Assume that X is a vector space. A norm is a mapping X R with x such that for all x, y X, α R x = = x = αx = α x x + y x + y We define the following norms on the vector
Nonlinear equations Norms for R n Assume that X is a vector space. A norm is a mapping X R with x such that for all x, y X, α R x = = x = αx = α x x + y x + y We define the following norms on the vector
converges as well if x < 1. 1 x n x n 1 1 = 2 a nx n
 Solve the following 6 problems. 1. Prove that if series n=1 a nx n converges for all x such that x < 1, then the series n=1 a n xn 1 x converges as well if x < 1. n For x < 1, x n 0 as n, so there exists
Solve the following 6 problems. 1. Prove that if series n=1 a nx n converges for all x such that x < 1, then the series n=1 a n xn 1 x converges as well if x < 1. n For x < 1, x n 0 as n, so there exists
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games
 Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
PH.D. PRELIMINARY EXAMINATION MATHEMATICS
 UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering FALL SEMESTER 2014 Structural Engineering, Mechanics and Materials NAME PH.D. PRELIMINARY EXAMINATION MATHEMATICS Problem
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering FALL SEMESTER 2014 Structural Engineering, Mechanics and Materials NAME PH.D. PRELIMINARY EXAMINATION MATHEMATICS Problem
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
1. Nonlinear Equations. This lecture note excerpted parts from Michael Heath and Max Gunzburger. f(x) = 0
 = 0") Numerical Analysis 1 1. Nonlinear Equations This lecture note excerpted parts from Michael Heath and Max Gunzburger. Given function f, we seek value x for which where f : D R n R n is nonlinear. f(x) =
Numerical Analysis 1 1. Nonlinear Equations This lecture note excerpted parts from Michael Heath and Max Gunzburger. Given function f, we seek value x for which where f : D R n R n is nonlinear. f(x) =
Dynamical Systems in Neuroscience: Elementary Bifurcations
 Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Introduction to Nonlinear Control Lecture # 3 Time-Varying and Perturbed Systems
 p. 1/5 Introduction to Nonlinear Control Lecture # 3 Time-Varying and Perturbed Systems p. 2/5 Time-varying Systems ẋ = f(t, x) f(t, x) is piecewise continuous in t and locally Lipschitz in x for all t
p. 1/5 Introduction to Nonlinear Control Lecture # 3 Time-Varying and Perturbed Systems p. 2/5 Time-varying Systems ẋ = f(t, x) f(t, x) is piecewise continuous in t and locally Lipschitz in x for all t
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
Chapter Two: Numerical Methods for Elliptic PDEs. 1 Finite Difference Methods for Elliptic PDEs
 Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Input-Output and Input-State Linearization Zero Dynamics of Nonlinear Systems Hanz Richter Mechanical Engineering Department Cleveland State University
MCE693/793: Analysis and Control of Nonlinear Systems Input-Output and Input-State Linearization Zero Dynamics of Nonlinear Systems Hanz Richter Mechanical Engineering Department Cleveland State University
CALCULUS JIA-MING (FRANK) LIOU
 LIOU") CALCULUS JIA-MING (FRANK) LIOU Abstract. Contents. Power Series.. Polynomials and Formal Power Series.2. Radius of Convergence 2.3. Derivative and Antiderivative of Power Series 4.4. Power Series Expansion
CALCULUS JIA-MING (FRANK) LIOU Abstract. Contents. Power Series.. Polynomials and Formal Power Series.2. Radius of Convergence 2.3. Derivative and Antiderivative of Power Series 4.4. Power Series Expansion
Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs
 Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs Štefan Knotek, Kristian Hengster-Movric and Michael Šebek Department of Control Engineering, Czech Technical University, Prague,
Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs Štefan Knotek, Kristian Hengster-Movric and Michael Šebek Department of Control Engineering, Czech Technical University, Prague,
Consensus, Flocking and Opinion Dynamics
 Consensus, Flocking and Opinion Dynamics Antoine Girard Laboratoire Jean Kuntzmann, Université de Grenoble antoine.girard@imag.fr International Summer School of Automatic Control GIPSA Lab, Grenoble, France,
Consensus, Flocking and Opinion Dynamics Antoine Girard Laboratoire Jean Kuntzmann, Université de Grenoble antoine.girard@imag.fr International Summer School of Automatic Control GIPSA Lab, Grenoble, France,
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
Nonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State Stability
 p. 1/1 Nonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State Stability p. 2/1 Perturbed Systems: Nonvanishing Perturbation Nominal System: Perturbed System: ẋ = f(x), f(0) = 0 ẋ
p. 1/1 Nonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State Stability p. 2/1 Perturbed Systems: Nonvanishing Perturbation Nominal System: Perturbed System: ẋ = f(x), f(0) = 0 ẋ
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems. p. 1/1
 Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
A conjecture on sustained oscillations for a closed-loop heat equation
 A conjecture on sustained oscillations for a closed-loop heat equation C.I. Byrnes, D.S. Gilliam Abstract The conjecture in this paper represents an initial step aimed toward understanding and shaping
A conjecture on sustained oscillations for a closed-loop heat equation C.I. Byrnes, D.S. Gilliam Abstract The conjecture in this paper represents an initial step aimed toward understanding and shaping
Operator-Theoretic Characterization of Eventually Monotone Systems
 Operator-Theoretic Characterization of Eventually Monotone Systems eventual positivity has also been introduced to control theory [], []), while providing a number of powerful results. For example, in
Operator-Theoretic Characterization of Eventually Monotone Systems eventual positivity has also been introduced to control theory [], []), while providing a number of powerful results. For example, in
Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators
 Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators Ranjeetha Bharath and Jean-Jacques Slotine Massachusetts Institute of Technology ABSTRACT This work explores
Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators Ranjeetha Bharath and Jean-Jacques Slotine Massachusetts Institute of Technology ABSTRACT This work explores
Mathematics for Economists
 Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Nonlinear Control. Nonlinear Control Lecture # 2 Stability of Equilibrium Points
 Nonlinear Control Lecture # 2 Stability of Equilibrium Points Basic Concepts ẋ = f(x) f is locally Lipschitz over a domain D R n Suppose x D is an equilibrium point; that is, f( x) = 0 Characterize and
Nonlinear Control Lecture # 2 Stability of Equilibrium Points Basic Concepts ẋ = f(x) f is locally Lipschitz over a domain D R n Suppose x D is an equilibrium point; that is, f( x) = 0 Characterize and
Multivariable Calculus
 2 Multivariable Calculus 2.1 Limits and Continuity Problem 2.1.1 (Fa94) Let the function f : R n R n satisfy the following two conditions: (i) f (K ) is compact whenever K is a compact subset of R n. (ii)
2 Multivariable Calculus 2.1 Limits and Continuity Problem 2.1.1 (Fa94) Let the function f : R n R n satisfy the following two conditions: (i) f (K ) is compact whenever K is a compact subset of R n. (ii)
Polynomial level-set methods for nonlinear dynamical systems analysis
 Proceedings of the Allerton Conference on Communication, Control and Computing pages 64 649, 8-3 September 5. 5.7..4 Polynomial level-set methods for nonlinear dynamical systems analysis Ta-Chung Wang,4
Proceedings of the Allerton Conference on Communication, Control and Computing pages 64 649, 8-3 September 5. 5.7..4 Polynomial level-set methods for nonlinear dynamical systems analysis Ta-Chung Wang,4
Solution of Additional Exercises for Chapter 4
 1 1. (1) Try V (x) = 1 (x 1 + x ). Solution of Additional Exercises for Chapter 4 V (x) = x 1 ( x 1 + x ) x = x 1 x + x 1 x In the neighborhood of the origin, the term (x 1 + x ) dominates. Hence, the
1 1. (1) Try V (x) = 1 (x 1 + x ). Solution of Additional Exercises for Chapter 4 V (x) = x 1 ( x 1 + x ) x = x 1 x + x 1 x In the neighborhood of the origin, the term (x 1 + x ) dominates. Hence, the
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Partial Differential Equations
 Part II Partial Differential Equations Year 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2015 Paper 4, Section II 29E Partial Differential Equations 72 (a) Show that the Cauchy problem for u(x,
Part II Partial Differential Equations Year 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2015 Paper 4, Section II 29E Partial Differential Equations 72 (a) Show that the Cauchy problem for u(x,
Weak convergence and large deviation theory
 First Prev Next Go To Go Back Full Screen Close Quit 1 Weak convergence and large deviation theory Large deviation principle Convergence in distribution The Bryc-Varadhan theorem Tightness and Prohorov
First Prev Next Go To Go Back Full Screen Close Quit 1 Weak convergence and large deviation theory Large deviation principle Convergence in distribution The Bryc-Varadhan theorem Tightness and Prohorov
Poincaré Map, Floquet Theory, and Stability of Periodic Orbits
 Poincaré Map, Floquet Theory, and Stability of Periodic Orbits CDS140A Lecturer: W.S. Koon Fall, 2006 1 Poincaré Maps Definition (Poincaré Map): Consider ẋ = f(x) with periodic solution x(t). Construct
Poincaré Map, Floquet Theory, and Stability of Periodic Orbits CDS140A Lecturer: W.S. Koon Fall, 2006 1 Poincaré Maps Definition (Poincaré Map): Consider ẋ = f(x) with periodic solution x(t). Construct
On the Stability of the Best Reply Map for Noncooperative Differential Games
 On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
Robust Synchronization in Networks of Compartmental Systems. Milad Alekajbaf
 Robust Synchronization in Networks of Compartmental Systems by Milad Alekajbaf A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of
Robust Synchronization in Networks of Compartmental Systems by Milad Alekajbaf A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of
Lecture 10: Singular Perturbations and Averaging 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.243j (Fall 2003): DYNAMICS OF NONLINEAR SYSTEMS by A. Megretski Lecture 10: Singular Perturbations and
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.243j (Fall 2003): DYNAMICS OF NONLINEAR SYSTEMS by A. Megretski Lecture 10: Singular Perturbations and
Introduction to Nonlinear Control Lecture # 4 Passivity
 p. 1/6 Introduction to Nonlinear Control Lecture # 4 Passivity È p. 2/6 Memoryless Functions ¹ y È Ý Ù È È È È u (b) µ power inflow = uy Resistor is passive if uy 0 p. 3/6 y y y u u u (a) (b) (c) Passive
p. 1/6 Introduction to Nonlinear Control Lecture # 4 Passivity È p. 2/6 Memoryless Functions ¹ y È Ý Ù È È È È u (b) µ power inflow = uy Resistor is passive if uy 0 p. 3/6 y y y u u u (a) (b) (c) Passive
MA5510 Ordinary Differential Equation, Fall, 2014
 MA551 Ordinary Differential Equation, Fall, 214 9/3/214 Linear systems of ordinary differential equations: Consider the first order linear equation for some constant a. The solution is given by such that
MA551 Ordinary Differential Equation, Fall, 214 9/3/214 Linear systems of ordinary differential equations: Consider the first order linear equation for some constant a. The solution is given by such that
The goal of this chapter is to study linear systems of ordinary differential equations: dt,..., dx ) T
 T") 1 1 Linear Systems The goal of this chapter is to study linear systems of ordinary differential equations: ẋ = Ax, x(0) = x 0, (1) where x R n, A is an n n matrix and ẋ = dx ( dt = dx1 dt,..., dx ) T n.
1 1 Linear Systems The goal of this chapter is to study linear systems of ordinary differential equations: ẋ = Ax, x(0) = x 0, (1) where x R n, A is an n n matrix and ẋ = dx ( dt = dx1 dt,..., dx ) T n.
arxiv: v3 [math.ds] 12 Jun 2013
![arxiv: v3 [math.ds] 12 Jun 2013](/thumbs/81/82952637.jpg "arxiv: v3 [math.ds] 12 Jun 2013") Isostables, isochrons, and Koopman spectrum for the action-angle representation of stable fixed point dynamics A. Mauroy, I. Mezic, and J. Moehlis Department of Mechanical Engineering, University of California
Isostables, isochrons, and Koopman spectrum for the action-angle representation of stable fixed point dynamics A. Mauroy, I. Mezic, and J. Moehlis Department of Mechanical Engineering, University of California
1. If 1, ω, ω 2, -----, ω 9 are the 10 th roots of unity, then (1 + ω) (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0
 (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0") 4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
Introduction to Geometric Control
 Introduction to Geometric Control Relative Degree Consider the square (no of inputs = no of outputs = p) affine control system ẋ = f(x) + g(x)u = f(x) + [ g (x),, g p (x) ] u () h (x) y = h(x) = (2) h
Introduction to Geometric Control Relative Degree Consider the square (no of inputs = no of outputs = p) affine control system ẋ = f(x) + g(x)u = f(x) + [ g (x),, g p (x) ] u () h (x) y = h(x) = (2) h
An introduction to Mathematical Theory of Control
 An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
Part II. Dynamical Systems. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
(3) Let Y be a totally bounded subset of a metric space X. Then the closure Y of Y
 Let Y be a totally bounded subset of a metric space X. Then the closure Y of Y") () Consider A = { q Q : q 2 2} as a subset of the metric space (Q, d), where d(x, y) = x y. Then A is A) closed but not open in Q B) open but not closed in Q C) neither open nor closed in Q D) both open
() Consider A = { q Q : q 2 2} as a subset of the metric space (Q, d), where d(x, y) = x y. Then A is A) closed but not open in Q B) open but not closed in Q C) neither open nor closed in Q D) both open
Control Systems. Internal Stability - LTI systems. L. Lanari
 Control Systems Internal Stability - LTI systems L. Lanari outline LTI systems: definitions conditions South stability criterion equilibrium points Nonlinear systems: equilibrium points examples stable
Control Systems Internal Stability - LTI systems L. Lanari outline LTI systems: definitions conditions South stability criterion equilibrium points Nonlinear systems: equilibrium points examples stable