Der SPP 1167-PQP und die stochastische Wettervorhersage
|
|
|
- Christopher Chapman
- 6 years ago
- Views:
Transcription



1 Der SPP 1167-PQP und die stochastische Wettervorhersage Andreas Hense 9. November 2007
2 Overview The priority program SPP1167: mission and structure The stochastic weather forecasting Introduction, Probabilities and the Bayes-Theorem Stochastic dynamics of weather (and climate) Modelling stochastic dynamics Verification and Calibration Assimilation Examples 1
3 History: first round table discussions 2000 and 2001 submission preproposal November 2001 withdrawal February 2002 Elbe flooding Summer 2002 finalization of proposal end of 2002 submission in February
4 approval by the senate of DFG in May 2003 for 6 years submission of individual proposals Oct. 2003, approval in January 2004 kick-off meeting in April 2004 second phase since April 2006, now halftime submission of last phase ( ) projects October 31st, 2007; review January 10th,2008
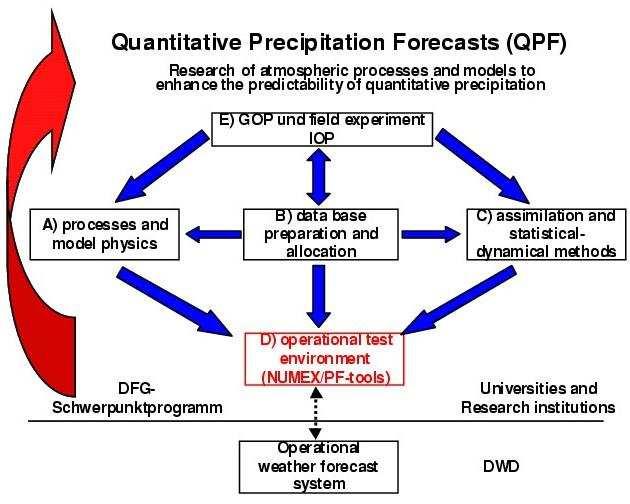
5 The goals from the initial proposal: Identification of physical and chemical processes responsible for the deficiencies in quantitative precipitation forecast Determination and use of the potentials of existing and new data and process descriptions to improve quantitative precipitation forecast Determination of predictability of weather forecast models by statisticodynamic analyses with respect to quantitative precipitation forecast 3
6 These goals are related to the following tasks Understanding of atmospheric processes relevant to precipitation formation has to be improved considerably. These processes have to be modeled in a more realistic manner. Initial distribution of the atmospheric water content in the three phases of vapor, liquid, and ice has to be improved by data that have not been used so far and new data. Their potential for quantitative precipitation forecast has to be quantified. 4
7 Methods of assimilating measurement data into atmospheric simulation models and application of these methods to data of any type for a statistico-dynamically consistent retrieval of the initial water distribution and, hence, optimum use of all data have to be improved. The stochastic character of precipitation has to be taken into account when using observational data, interpreting deterministic simulations, and developing alternative forecast strategies. 5
8 6
9 International Sister projects IHOP in USA CSIP in UK Quest-B in Belgium COPS-France MeteoSwiss/ETH Z urich University Vienna 7
10 Why did we include the stochastic aspect? for practical reasons to treat the physics of atmospheric dynamics correctly 8
11 Probabilities, probability densities and all those things.. o Observation space-time vector f model state space-time vector forecasts [ f, o] joint probability (density) of observations and model state [ o f] conditional probability (density) of observations given the model state 9
12 Why is the atmosphere a stochastic system? it is high-dimensional it is non linear 10
13 High - dimensionality total volume of the atmosphere: spherical shell thickness h 100km smallest unit volume V 0 1mm 3 = 10 9 m 3 within each unit volume about n i O(100) variables like Θ, p, ρ i, u, v, etc V 4πhR 2 Earth 4π10 5 ( ) m 3 V V V n i V
14 We need about numbers to characterize the actual state of the atmosphere T The observed state o is much smaller in dimension through a projection by measurements H: o = H( T ) + ɛ o detailed computations are impossible statistical physics: probability density description [ T ](t) with [( T )]d T = 1 12
15 The model approach high resolution global models: discrete spherical shell with about grid points unit volumes 20km 2 1km within each unit volume about n i O(10) variables like Θ, p, ρ i, u, v, etc 13
16 We can treat numerically about 10 9 degrees-of-freedom to characterize the actual state f of high resolution atmospheric model the remaining d-o-f s in the state description ( T = f introduce observational or aleatoric uncertainty ɛ o a variety of true states T are possible for a given model state f the influence of the remaining d-o-f s ( ) on the dynamics has to be parametrized introducing structural or epistemic uncertainty both have to be treated by probabilities 14
17 Additionally: atmosphere and its quasi-realistic model counterparts are nonlinear dynamical systems with embedded instabilities like convective instability inertial instability barotropic and baroclinic instability Nonlinearities and instabilities amplify small uncertainties (e.g. from the aleatoric part of initial conditions): The famous Lorenz butterfly (using the Lorenz (1984) model) 15
18 (Lorenz, 1984): Dynamics of two Rossbywaves (amplitudes y, z) of equal zonal wavelength in einem zonal symmetric zonal base flow (wavenumber zero) of strength x, forced by differential heating af. one of the Rossby waves is forced by orography or land-sea contrast (G). 16
19 Lorenz (1984) model: d dt x = ax y2 z 2 + af d y = xy y bxz + G dt d z = xz + bxy z dt 17
20 2.5 Zonaler Grundstrom Wahrscheinlichkeitsdichte Zonaler Grundstrom Zeit [d] Zeit [d]
21 Working hypothesis The uncertainty in the atmospheric dynamic evolution can only be adequately described by probabilities or probability densities pdf. 18
22 Consequences for verification (Murphy and Winkler, 1987): any comparison of simulation f and observation o e.g. for verification has be done using the joint pdf [ o, f]. can be done with the Bayes-theorem using conditional probabilities [ o, f] = [ o f][ f] = [ f o][ o] or [ f o] }{{} posterior = 1 [ o] [ o f] }{{} likelihood [ f] }{{} prior note that o = ( o t, o t+1,..., o t+τ ) and similar for f 19
23 [ f] describes the stochastic dynamics of the forecast model [ o f] = [ o f, H, λ] models the measurement process, λ unknown parameters describe the difference between the actual measurement H and its discrete analog H 20
24 Modelling the stochastic dynamics E.g. for a single deterministic model forecast [ f t+τ f t+τ 1 ] = δ( f t+τ M t+τ,t+τ 1 ( f t+τ 1 )) But how to proceed with ensembles of deterministic forecasts or even stochastic forecasts d f = F ( f) dt d f = F ( f) + G( f) dt d dt W (t) }{{} Random Walk Idea: Probability is like a mass and can not be lost along trajectories in phase space: d dt ([ f]d f) = 0 21
25 For an ensemble of a deterministic model this leads to the Liouville equation t [ f] + F f [ f] = 0 For an ensemble of a stochastic model and a general noise model one gets the Kramers-Moyal equation, which simplifies under Gaussian noise to the Fokker-Planck Equation t [ f] + f ( F [ f]) 1 f (Q }{{} f [ f]) = 0 } 2 {{} Drift Diffusion
26 The Fokker-Planck equation A linear, but high-dimensional advection-diffusion equation. no analytical solution in general Numerical treatment up to 20 dimensions possible Nice theory but of almost no practical use 22
27 Two (three) methods for treating stochastic dynamics: Estimation of [f] instead of calculation well known Monte Carlo (ensemble) forecasting sample from the initial value density [ f t ]: a specific initial condition integrate each sample separately in the deterministic case as f t+1 M t+1,t ( f t ): ensemble forecasting in the stochastic case decide for a special calculus f t+1 f t = F dt + GdW (t) which determines the value of the last integral 23
28 Ito or Stratonovich type the discrete 1-d case (Milstein scheme) f t+1 f t = F (t) t + G(t) W (t) G(t) d df G(t)( W 2 α I,S t) W (t) Gaussian white noise with mean zero and variance t α I,S = 1 in case of Ito calculus α I,S = 0 in case of Stratonovich calculus less well known stochastic projection f t = k g k ( ζ) f k (t) combination of both

29 the propqpf project: the deterministic GME ensemble system 24
30 the propqpf project: a GME ensemble system 25
31 Verification, Calibration and Model Output Statistics Verification at lead time τ and stationarity assumption [ f t+τ o t+τ ] = [ o t+τ f t+τ ][ f t+τ ] [ o t+τ ] [ o t+τ f t+τ ] = [ o t+τ f t+τ, H, λ] models the measurement process, λ set of unknown parameters describing the difference between the actual measurement H and its discrete analog H λ are fixed by maximizing [ o t+τ f t+τ ] [ f t+τ o t+τ ] = argmax λ ( [ o t+τ f t+τ ][ f t+τ ] ) [ o t+τ ] 1 = [ o t+τ ] argmax λ([ o t+τ f t+τ, λ][ f t+τ ]) 26
32 model output statistics MOS (Glahn and Lowry, 1972)
33 A MOS example (T. Winkelnkemper, diploma thesis) multiple linear regression with Kalman updating of regression coefficients T max Stuttgart August
34 if the set of free parameters λ is instead a part of the dynamical model [ f t+τ ] = [ f t+τ λ] we can calibrate the model by maximizing the posterior [ f t+τ o t+τ ] another type of calibration Bayesian Model Averaging BMA / dressing [ f t+τ o t+τ ] k w k ( o t+τ )[ f t+τ f (k) t+τ ] E{ k δ( f t+τ f (k) t+τ )} calibration is a necessary ingredient for ensemble forecasting 28
35 Data assimilation For weather ensemble prediction the probability density [ f t ] is not an unconditional probability density. It is conditioned on the observations at initial time [ f t+τ ] = [ f t o t ] Modern data assimilation systems (3d-var,4d-var) determine the most probable state of the model given the observations (with the additional assumption of a Gaussian density, see below) [ f t o t ]! = max 29
36 or [ f t o t ] [ o t f t ] [ f t ] }{{} First guess! = max (also used in remote sensing retrieval methods)
37 Theoretical consideration about the structure of the problem show that probabilistic treatment interrelates the verification, model output statistics, the calibration and the assimilation but is in its general form unusable: multidimensional integrals and optimization but allows one to boil down the problem and check the assumption necessary to arrive at a solvable problem Markov Chain Monte Carlo, stochastic fitting, Bayesian model averaging 30
38 Conclusions Stochastic weather forecasting and it s relatives are part of the SPP1167 mission Stochastic weather forecasting has its origin in the physics of atmospheric dynamics Stochastic weather forecasting can be structured through Bayes theorem A theoretical overview is necessary to assess the assumption for specific problems Avoid ad-hoc statistics 31
39 Announcement of a summerschool August/September 2008 in Potsdam jointly with SPP1167 PQP and SPP 1176 MetStroem on supercomputing and theoretical aspects of atmospheric dynamics organizer: Rupert Klein (Potsdam/Berlin), Nikos Nikiforakis (Oxford), Andreas Hense (Bonn) 32
The priority program SPP1167 Quantitative Precipitation Forecast PQP and the stochastic view of weather forecasting
 The priority program SPP1167 Quantitative Precipitation Forecast PQP and the stochastic view of weather forecasting Andreas Hense 9. November 2007 Overview The priority program SPP1167: mission and structure
The priority program SPP1167 Quantitative Precipitation Forecast PQP and the stochastic view of weather forecasting Andreas Hense 9. November 2007 Overview The priority program SPP1167: mission and structure
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Ergodicity in data assimilation methods
 Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
BAYESIAN PROCESSOR OF OUTPUT: A NEW TECHNIQUE FOR PROBABILISTIC WEATHER FORECASTING. Roman Krzysztofowicz
 BAYESIAN PROCESSOR OF OUTPUT: A NEW TECHNIQUE FOR PROBABILISTIC WEATHER FORECASTING By Roman Krzysztofowicz Department of Systems Engineering and Department of Statistics University of Virginia P.O. Box
BAYESIAN PROCESSOR OF OUTPUT: A NEW TECHNIQUE FOR PROBABILISTIC WEATHER FORECASTING By Roman Krzysztofowicz Department of Systems Engineering and Department of Statistics University of Virginia P.O. Box
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Smoothers: Types and Benchmarks
 Smoothers: Types and Benchmarks Patrick N. Raanes Oxford University, NERSC 8th International EnKF Workshop May 27, 2013 Chris Farmer, Irene Moroz Laurent Bertino NERSC Geir Evensen Abstract Talk builds
Smoothers: Types and Benchmarks Patrick N. Raanes Oxford University, NERSC 8th International EnKF Workshop May 27, 2013 Chris Farmer, Irene Moroz Laurent Bertino NERSC Geir Evensen Abstract Talk builds
Analytical Non-Linear Uncertainty Propagation: Theory And Implementation
 Analytical Non-Linear Uncertainty Propagation: Theory And Implementation Kohei Fujimoto 1), Daniel J. Scheeres 2), and K. Terry Alfriend 1) May 13, 2013 1) Texas A&M University 2) The University of Colorado
Analytical Non-Linear Uncertainty Propagation: Theory And Implementation Kohei Fujimoto 1), Daniel J. Scheeres 2), and K. Terry Alfriend 1) May 13, 2013 1) Texas A&M University 2) The University of Colorado
Model error and seasonal forecasting
 Model error and seasonal forecasting Antje Weisheimer European Centre for Medium-Range Weather Forecasts ECMWF, Reading, UK with thanks to Paco Doblas-Reyes and Tim Palmer Model error and model uncertainty
Model error and seasonal forecasting Antje Weisheimer European Centre for Medium-Range Weather Forecasts ECMWF, Reading, UK with thanks to Paco Doblas-Reyes and Tim Palmer Model error and model uncertainty
The Canadian approach to ensemble prediction
 The Canadian approach to ensemble prediction ECMWF 2017 Annual seminar: Ensemble prediction : past, present and future. Pieter Houtekamer Montreal, Canada Overview. The Canadian approach. What are the
The Canadian approach to ensemble prediction ECMWF 2017 Annual seminar: Ensemble prediction : past, present and future. Pieter Houtekamer Montreal, Canada Overview. The Canadian approach. What are the
Multivariate verification: Motivation, Complexity, Examples
 Multivariate verification: Motivation, Complexity, Examples A.Hense, A. Röpnack, J. Keune, R. Glowienka-Hense, S. Stolzenberger, H. Weinert Berlin, May, 5th 2017 Motivations for MV verification Data assimilation
Multivariate verification: Motivation, Complexity, Examples A.Hense, A. Röpnack, J. Keune, R. Glowienka-Hense, S. Stolzenberger, H. Weinert Berlin, May, 5th 2017 Motivations for MV verification Data assimilation
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
If we want to analyze experimental or simulated data we might encounter the following tasks:
 Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction
Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Models for models. Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research
 Models for models Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Outline Statistical models and tools Spatial fields (Wavelets) Climate regimes (Regression and clustering)
Models for models Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Outline Statistical models and tools Spatial fields (Wavelets) Climate regimes (Regression and clustering)
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
State-space Model. Eduardo Rossi University of Pavia. November Rossi State-space Model Financial Econometrics / 49
 State-space Model Eduardo Rossi University of Pavia November 2013 Rossi State-space Model Financial Econometrics - 2013 1 / 49 Outline 1 Introduction 2 The Kalman filter 3 Forecast errors 4 State smoothing
State-space Model Eduardo Rossi University of Pavia November 2013 Rossi State-space Model Financial Econometrics - 2013 1 / 49 Outline 1 Introduction 2 The Kalman filter 3 Forecast errors 4 State smoothing
State-space Model. Eduardo Rossi University of Pavia. November Rossi State-space Model Fin. Econometrics / 53
 State-space Model Eduardo Rossi University of Pavia November 2014 Rossi State-space Model Fin. Econometrics - 2014 1 / 53 Outline 1 Motivation 2 Introduction 3 The Kalman filter 4 Forecast errors 5 State
State-space Model Eduardo Rossi University of Pavia November 2014 Rossi State-space Model Fin. Econometrics - 2014 1 / 53 Outline 1 Motivation 2 Introduction 3 The Kalman filter 4 Forecast errors 5 State
Calibration of extreme temperature forecasts of MOS_EPS model over Romania with the Bayesian Model Averaging
 Volume 11 Issues 1-2 2014 Calibration of extreme temperature forecasts of MOS_EPS model over Romania with the Bayesian Model Averaging Mihaela-Silvana NEACSU National Meteorological Administration, Bucharest
Volume 11 Issues 1-2 2014 Calibration of extreme temperature forecasts of MOS_EPS model over Romania with the Bayesian Model Averaging Mihaela-Silvana NEACSU National Meteorological Administration, Bucharest
Consider the joint probability, P(x,y), shown as the contours in the figure above. P(x) is given by the integral of P(x,y) over all values of y.
, shown as the contours in the figure above. P(x) is given by the integral of P(x,y) over all values of y.") ATMO/OPTI 656b Spring 009 Bayesian Retrievals Note: This follows the discussion in Chapter of Rogers (000) As we have seen, the problem with the nadir viewing emission measurements is they do not contain
ATMO/OPTI 656b Spring 009 Bayesian Retrievals Note: This follows the discussion in Chapter of Rogers (000) As we have seen, the problem with the nadir viewing emission measurements is they do not contain
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling
 A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
Overview of Achievements October 2001 October 2003 Adrian Raftery, P.I. MURI Overview Presentation, 17 October 2003 c 2003 Adrian E.
 MURI Project: Integration and Visualization of Multisource Information for Mesoscale Meteorology: Statistical and Cognitive Approaches to Visualizing Uncertainty, 2001 2006 Overview of Achievements October
MURI Project: Integration and Visualization of Multisource Information for Mesoscale Meteorology: Statistical and Cognitive Approaches to Visualizing Uncertainty, 2001 2006 Overview of Achievements October
Control Theory in Physics and other Fields of Science
 Michael Schulz Control Theory in Physics and other Fields of Science Concepts, Tools, and Applications With 46 Figures Sprin ger 1 Introduction 1 1.1 The Aim of Control Theory 1 1.2 Dynamic State of Classical
Michael Schulz Control Theory in Physics and other Fields of Science Concepts, Tools, and Applications With 46 Figures Sprin ger 1 Introduction 1 1.1 The Aim of Control Theory 1 1.2 Dynamic State of Classical
Predictability is the degree to which a correct prediction or forecast of a system's state can be made either qualitatively or quantitatively.
 Predictability is the degree to which a correct prediction or forecast of a system's state can be made either qualitatively or quantitatively. The ability to make a skillful forecast requires both that
Predictability is the degree to which a correct prediction or forecast of a system's state can be made either qualitatively or quantitatively. The ability to make a skillful forecast requires both that
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
State and Parameter Estimation in Stochastic Dynamical Models
 State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
1. Current atmospheric DA systems 2. Coupling surface/atmospheric DA 3. Trends & ideas
 1 Current issues in atmospheric data assimilation and its relationship with surfaces François Bouttier GAME/CNRM Météo-France 2nd workshop on remote sensing and modeling of surface properties, Toulouse,
1 Current issues in atmospheric data assimilation and its relationship with surfaces François Bouttier GAME/CNRM Météo-France 2nd workshop on remote sensing and modeling of surface properties, Toulouse,
Inverse problems and uncertainty quantification in remote sensing
 1 / 38 Inverse problems and uncertainty quantification in remote sensing Johanna Tamminen Finnish Meterological Institute johanna.tamminen@fmi.fi ESA Earth Observation Summer School on Earth System Monitoring
1 / 38 Inverse problems and uncertainty quantification in remote sensing Johanna Tamminen Finnish Meterological Institute johanna.tamminen@fmi.fi ESA Earth Observation Summer School on Earth System Monitoring
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications
 Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Ensemble Kalman Filter
 Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Bayesian Statistics and Data Assimilation. Jonathan Stroud. Department of Statistics The George Washington University
 Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
Review. DS GA 1002 Statistical and Mathematical Models. Carlos Fernandez-Granda
 Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Chapter 6: Ensemble Forecasting and Atmospheric Predictability. Introduction
 Chapter 6: Ensemble Forecasting and Atmospheric Predictability Introduction Deterministic Chaos (what!?) In 1951 Charney indicated that forecast skill would break down, but he attributed it to model errors
Chapter 6: Ensemble Forecasting and Atmospheric Predictability Introduction Deterministic Chaos (what!?) In 1951 Charney indicated that forecast skill would break down, but he attributed it to model errors
Covariance Matrix Simplification For Efficient Uncertainty Management
 PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
Fundamentals of Data Assimila1on
 2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Kody Law Andy Majda Andrew Stuart Xin Tong Courant Institute New York University New York NY www.dtbkelly.com February 3, 2016 DPMMS, University of Cambridge
Data assimilation in high dimensions David Kelly Kody Law Andy Majda Andrew Stuart Xin Tong Courant Institute New York University New York NY www.dtbkelly.com February 3, 2016 DPMMS, University of Cambridge
Handbook of Stochastic Methods
 C. W. Gardiner Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences Third Edition With 30 Figures Springer Contents 1. A Historical Introduction 1 1.1 Motivation I 1.2 Some Historical
C. W. Gardiner Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences Third Edition With 30 Figures Springer Contents 1. A Historical Introduction 1 1.1 Motivation I 1.2 Some Historical
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Introduction to Data Assimilation
 Introduction to Data Assimilation Alan O Neill Data Assimilation Research Centre University of Reading What is data assimilation? Data assimilation is the technique whereby observational data are combined
Introduction to Data Assimilation Alan O Neill Data Assimilation Research Centre University of Reading What is data assimilation? Data assimilation is the technique whereby observational data are combined
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes
 Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
A Global Atmospheric Model. Joe Tribbia NCAR Turbulence Summer School July 2008
 A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen. Bayesian Learning. Tobias Scheffer, Niels Landwehr
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Continuum Limit of Forward Kolmogorov Equation Friday, March 06, :04 PM
 Continuum Limit of Forward Kolmogorov Equation Friday, March 06, 2015 2:04 PM Please note that one of the equations (for ordinary Brownian motion) in Problem 1 was corrected on Wednesday night. And actually
Continuum Limit of Forward Kolmogorov Equation Friday, March 06, 2015 2:04 PM Please note that one of the equations (for ordinary Brownian motion) in Problem 1 was corrected on Wednesday night. And actually
Coupled ocean-atmosphere ENSO bred vector
 Coupled ocean-atmosphere ENSO bred vector Shu-Chih Yang 1,2, Eugenia Kalnay 1, Michele Rienecker 2 and Ming Cai 3 1 ESSIC/AOSC, University of Maryland 2 GMAO, NASA/ Goddard Space Flight Center 3 Dept.
Coupled ocean-atmosphere ENSO bred vector Shu-Chih Yang 1,2, Eugenia Kalnay 1, Michele Rienecker 2 and Ming Cai 3 1 ESSIC/AOSC, University of Maryland 2 GMAO, NASA/ Goddard Space Flight Center 3 Dept.
Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics
 JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 99, NO. C, PAGES,143,162, MAY, 1994 Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics Geir
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 99, NO. C, PAGES,143,162, MAY, 1994 Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics Geir
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Forecasting and data assimilation
 Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Sub-kilometer-scale space-time stochastic rainfall simulation
 Picture: Huw Alexander Ogilvie Sub-kilometer-scale space-time stochastic rainfall simulation Lionel Benoit (University of Lausanne) Gregoire Mariethoz (University of Lausanne) Denis Allard (INRA Avignon)
Picture: Huw Alexander Ogilvie Sub-kilometer-scale space-time stochastic rainfall simulation Lionel Benoit (University of Lausanne) Gregoire Mariethoz (University of Lausanne) Denis Allard (INRA Avignon)
Stochastic methods for representing atmospheric model uncertainties in ECMWF's IFS model
 Stochastic methods for representing atmospheric model uncertainties in ECMWF's IFS model Sarah-Jane Lock Model Uncertainty, Research Department, ECMWF With thanks to Martin Leutbecher, Simon Lang, Pirkka
Stochastic methods for representing atmospheric model uncertainties in ECMWF's IFS model Sarah-Jane Lock Model Uncertainty, Research Department, ECMWF With thanks to Martin Leutbecher, Simon Lang, Pirkka
Modelling Under Risk and Uncertainty
 Modelling Under Risk and Uncertainty An Introduction to Statistical, Phenomenological and Computational Methods Etienne de Rocquigny Ecole Centrale Paris, Universite Paris-Saclay, France WILEY A John Wiley
Modelling Under Risk and Uncertainty An Introduction to Statistical, Phenomenological and Computational Methods Etienne de Rocquigny Ecole Centrale Paris, Universite Paris-Saclay, France WILEY A John Wiley
Detection theory 101 ELEC-E5410 Signal Processing for Communications
 Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Handbook of Stochastic Methods
 Springer Series in Synergetics 13 Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences von Crispin W Gardiner Neuausgabe Handbook of Stochastic Methods Gardiner schnell und portofrei
Springer Series in Synergetics 13 Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences von Crispin W Gardiner Neuausgabe Handbook of Stochastic Methods Gardiner schnell und portofrei
Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes
 Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes Ellida M. Khazen * 13395 Coppermine Rd. Apartment 410 Herndon VA 20171 USA Abstract
Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes Ellida M. Khazen * 13395 Coppermine Rd. Apartment 410 Herndon VA 20171 USA Abstract
Statistical Methods in Particle Physics Lecture 1: Bayesian methods
 Statistical Methods in Particle Physics Lecture 1: Bayesian methods SUSSP65 St Andrews 16 29 August 2009 Glen Cowan Physics Department Royal Holloway, University of London g.cowan@rhul.ac.uk www.pp.rhul.ac.uk/~cowan
Statistical Methods in Particle Physics Lecture 1: Bayesian methods SUSSP65 St Andrews 16 29 August 2009 Glen Cowan Physics Department Royal Holloway, University of London g.cowan@rhul.ac.uk www.pp.rhul.ac.uk/~cowan
Bred vectors: theory and applications in operational forecasting. Eugenia Kalnay Lecture 3 Alghero, May 2008
 Bred vectors: theory and applications in operational forecasting. Eugenia Kalnay Lecture 3 Alghero, May 2008 ca. 1974 Central theorem of chaos (Lorenz, 1960s): a) Unstable systems have finite predictability
Bred vectors: theory and applications in operational forecasting. Eugenia Kalnay Lecture 3 Alghero, May 2008 ca. 1974 Central theorem of chaos (Lorenz, 1960s): a) Unstable systems have finite predictability
Probing the covariance matrix
 Probing the covariance matrix Kenneth M. Hanson Los Alamos National Laboratory (ret.) BIE Users Group Meeting, September 24, 2013 This presentation available at http://kmh-lanl.hansonhub.com/ LA-UR-06-5241
Probing the covariance matrix Kenneth M. Hanson Los Alamos National Laboratory (ret.) BIE Users Group Meeting, September 24, 2013 This presentation available at http://kmh-lanl.hansonhub.com/ LA-UR-06-5241
Probabilities for climate projections
 Probabilities for climate projections Claudia Tebaldi, Reinhard Furrer Linda Mearns, Doug Nychka National Center for Atmospheric Research Richard Smith - UNC-Chapel Hill Steve Sain - CU-Denver Statistical
Probabilities for climate projections Claudia Tebaldi, Reinhard Furrer Linda Mearns, Doug Nychka National Center for Atmospheric Research Richard Smith - UNC-Chapel Hill Steve Sain - CU-Denver Statistical
At A Glance. UQ16 Mobile App.
 At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
Verification-Based Model Tuning
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Verification-Based Model Tuning Caren Marzban Applied Physics Laboratory, University of Washington 1013 N.E. 40th St. Seattle,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Verification-Based Model Tuning Caren Marzban Applied Physics Laboratory, University of Washington 1013 N.E. 40th St. Seattle,
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2014
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Supplementary Note on Bayesian analysis
 Supplementary Note on Bayesian analysis Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3, Madhusudhan Venkadesan
Supplementary Note on Bayesian analysis Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3, Madhusudhan Venkadesan
Development of Stochastic Artificial Neural Networks for Hydrological Prediction
 Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
An introduction to Bayesian statistics and model calibration and a host of related topics
 An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
Problem Selected Scores
 Statistics Ph.D. Qualifying Exam: Part II November 20, 2010 Student Name: 1. Answer 8 out of 12 problems. Mark the problems you selected in the following table. Problem 1 2 3 4 5 6 7 8 9 10 11 12 Selected
Statistics Ph.D. Qualifying Exam: Part II November 20, 2010 Student Name: 1. Answer 8 out of 12 problems. Mark the problems you selected in the following table. Problem 1 2 3 4 5 6 7 8 9 10 11 12 Selected
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Seminar: Data Assimilation
 Seminar: Data Assimilation Jonas Latz, Elisabeth Ullmann Chair of Numerical Mathematics (M2) Technical University of Munich Jonas Latz, Elisabeth Ullmann (TUM) Data Assimilation 1 / 28 Prerequisites Bachelor:
Seminar: Data Assimilation Jonas Latz, Elisabeth Ullmann Chair of Numerical Mathematics (M2) Technical University of Munich Jonas Latz, Elisabeth Ullmann (TUM) Data Assimilation 1 / 28 Prerequisites Bachelor:
Variational Learning : From exponential families to multilinear systems
 Variational Learning : From exponential families to multilinear systems Ananth Ranganathan th February 005 Abstract This note aims to give a general overview of variational inference on graphical models.
Variational Learning : From exponential families to multilinear systems Ananth Ranganathan th February 005 Abstract This note aims to give a general overview of variational inference on graphical models.
Lagrangian data assimilation for point vortex systems
 JOT J OURNAL OF TURBULENCE http://jot.iop.org/ Lagrangian data assimilation for point vortex systems Kayo Ide 1, Leonid Kuznetsov 2 and Christopher KRTJones 2 1 Department of Atmospheric Sciences and Institute
JOT J OURNAL OF TURBULENCE http://jot.iop.org/ Lagrangian data assimilation for point vortex systems Kayo Ide 1, Leonid Kuznetsov 2 and Christopher KRTJones 2 1 Department of Atmospheric Sciences and Institute
Application of the Ensemble Kalman Filter to History Matching
 Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Methods of Data Assimilation and Comparisons for Lagrangian Data
 Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
operational status and developments
 COSMO-DE DE-EPSEPS operational status and developments Christoph Gebhardt, Susanne Theis, Zied Ben Bouallègue, Michael Buchhold, Andreas Röpnack, Nina Schuhen Deutscher Wetterdienst, DWD COSMO-DE DE-EPSEPS
COSMO-DE DE-EPSEPS operational status and developments Christoph Gebhardt, Susanne Theis, Zied Ben Bouallègue, Michael Buchhold, Andreas Röpnack, Nina Schuhen Deutscher Wetterdienst, DWD COSMO-DE DE-EPSEPS
On a Data Assimilation Method coupling Kalman Filtering, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model
 On a Data Assimilation Method coupling, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model 2016 SIAM Conference on Uncertainty Quantification Basile Marchand 1, Ludovic
On a Data Assimilation Method coupling, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model 2016 SIAM Conference on Uncertainty Quantification Basile Marchand 1, Ludovic
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Inflow Forecasting for Hydropower Operations: Bayesian Model Averaging for Postprocessing Hydrological Ensembles
 Inflow Forecasting for Hydropower Operations: Bayesian Model Averaging for Postprocessing Hydrological Ensembles Andreas Kleiven, Ingelin Steinsland Norwegian University of Science & Technology Dept. of
Inflow Forecasting for Hydropower Operations: Bayesian Model Averaging for Postprocessing Hydrological Ensembles Andreas Kleiven, Ingelin Steinsland Norwegian University of Science & Technology Dept. of
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak
 Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Part 1: Expectation Propagation
 Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
First THORPEX International Science Symposium, Montreal
 Courtesy of Mel Shapiro Ladies and Gentlemen, The Rossby wave train you can find in the Thorpex Science Plan reached Europe on August 11, 2002. An upper level trough induced the development of a low pressure
Courtesy of Mel Shapiro Ladies and Gentlemen, The Rossby wave train you can find in the Thorpex Science Plan reached Europe on August 11, 2002. An upper level trough induced the development of a low pressure
The University of Auckland Applied Mathematics Bayesian Methods for Inverse Problems : why and how Colin Fox Tiangang Cui, Mike O Sullivan (Auckland),
,") The University of Auckland Applied Mathematics Bayesian Methods for Inverse Problems : why and how Colin Fox Tiangang Cui, Mike O Sullivan (Auckland), Geoff Nicholls (Statistics, Oxford) fox@math.auckland.ac.nz
The University of Auckland Applied Mathematics Bayesian Methods for Inverse Problems : why and how Colin Fox Tiangang Cui, Mike O Sullivan (Auckland), Geoff Nicholls (Statistics, Oxford) fox@math.auckland.ac.nz
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing
 Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Data Assimilation Research Testbed Tutorial
 Data Assimilation Research Testbed Tutorial Section 3: Hierarchical Group Filters and Localization Version 2.: September, 26 Anderson: Ensemble Tutorial 9//6 Ways to deal with regression sampling error:
Data Assimilation Research Testbed Tutorial Section 3: Hierarchical Group Filters and Localization Version 2.: September, 26 Anderson: Ensemble Tutorial 9//6 Ways to deal with regression sampling error:
Kalman Filter and Ensemble Kalman Filter
 Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Seamless Prediction. Hannah Christensen & Judith Berner. Climate and Global Dynamics Division National Center for Atmospheric Research, Boulder, CO
 Seamless Prediction Can we use shorter timescale forecasts to calibrate climate change projections? Hannah Christensen & Judith Berner Climate and Global Dynamics Division National Center for Atmospheric
Seamless Prediction Can we use shorter timescale forecasts to calibrate climate change projections? Hannah Christensen & Judith Berner Climate and Global Dynamics Division National Center for Atmospheric
Ensembles and Particle Filters for Ocean Data Assimilation
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Ensembles and Particle Filters for Ocean Data Assimilation Robert N. Miller College of Oceanic and Atmospheric Sciences
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Ensembles and Particle Filters for Ocean Data Assimilation Robert N. Miller College of Oceanic and Atmospheric Sciences
Climate Change: the Uncertainty of Certainty
 Climate Change: the Uncertainty of Certainty Reinhard Furrer, UZH JSS, Geneva Oct. 30, 2009 Collaboration with: Stephan Sain - NCAR Reto Knutti - ETHZ Claudia Tebaldi - Climate Central Ryan Ford, Doug
Climate Change: the Uncertainty of Certainty Reinhard Furrer, UZH JSS, Geneva Oct. 30, 2009 Collaboration with: Stephan Sain - NCAR Reto Knutti - ETHZ Claudia Tebaldi - Climate Central Ryan Ford, Doug
(Statistical Forecasting: with NWP). Notes from Kalnay (2003), appendix C Postprocessing of Numerical Model Output to Obtain Station Weather Forecasts
. Notes from Kalnay (2003), appendix C Postprocessing of Numerical Model Output to Obtain Station Weather Forecasts") 35 (Statistical Forecasting: with NWP). Notes from Kalnay (2003), appendix C Postprocessing of Numerical Model Output to Obtain Station Weather Forecasts If the numerical model forecasts are skillful,
35 (Statistical Forecasting: with NWP). Notes from Kalnay (2003), appendix C Postprocessing of Numerical Model Output to Obtain Station Weather Forecasts If the numerical model forecasts are skillful,