Designing Information Devices and Systems II Fall 2015 Note 22
|
|
|
- Marcus Sanders
- 6 years ago
- Views:
Transcription
 = (A BKC)x(k) + BKr(k) y(k) = Cx(k) In fact, people have called feedback, \"automatic control\" because one is automatically controlling the actuators to the system through this feedback loop.")
1 EE 16B Designing Information Devices and Systems II Fall 2015 Note 22 Notes taken by John Noonan (11/12) Graphing of the State Solutions Open loop x(k + 1) = Ax(k) + Bu(k) y(k) = Cx(k) Closed loop x(k + 1) = (A BKC)x(k) + BKr(k) y(k) = Cx(k) In fact, people have called feedback, "automatic control" because one is automatically controlling the actuators to the system through this feedback loop. Using our open loop terms (since this holds for both the open loop and closed loop system... we derived that: u(0) u(1) x(k) = A k x 0 + [A k 1 BA k 2. B...B].. u(k 1) EE 16B, Fall 2015, Note 22 1
2 These represent columns of the matrix. If there is just a single input to the system then the matrix on the left will be a single column but if there are multiple inputs, the matrix will expand in the columns. - Last time we looked at different cases: Case A: Zero Input u(0) = u(1) =... = u(k 1) = 0 and we asked, "how does x(k) - the state trajectory / solution look like for different patterns of eigenvalues of the matrix A. Case 1: A is diagonalizable. This means that A has n linearly independent eigenvectors, which further implies that we can use them to form a basis for our state space. In particular, we can write our initial state x 0 as a linear combination of sigmas and v s (the eigenvectors). x 0 = σ 1 v 1 + σ 2 v σ n v n. The eigenvectors can be complex, so if there is a complex eigenvector, it has to appear with its complex conjugate pair, so the imaginary parts cancel out. Example: n = 2 (however this is general, so it applies to any finite n) x 0 = σ 1 v 1 + σ 2 v 2 We do this because there is a particularly simple form to the solution: x(k) = A k (σ 1 v 1 + σ 2 v 2 ) Since the sigmas are scalars, we can bring them outside. x(k) = σ 1 λ k 1 v 1 + σ 2 λ k 2 v 2 Last time we focused on what happened when our eigenvalues are all real. The unit circle is important because, as we see from the equation we just wrote, if these eigenvalues have magnitude greater than 1, the solution x(k) will blow up as k gets large. If the magnitude is less than 1, the solution will decay. So, it is important to think about the concept of stability with regard to the magnitude of the eigenvalues. Back to the unit circle, even if the eigenvalues are inside the unit circle or on the unit circle, what are the type of patterns will we see in the response? We looked at combinations of eigenvalues when the eigenvalues were repeated at the same spot. When the eigenvalues were on the negative real axis, we saw this periodic or oscillatory behavior in the solutions. And for the eigenvalues that were on the positive real axis, we saw a constant decay as long as the magnitudes were strictly less than 1. And if the eigenvalues were on the unit circle, we saw that the solution was the same as the initial condition. Let s consider case f) where the eigenvalues appear in complex conjugate pairs. Before we proceed, what happens when the eigenvalue is 1 (the other eigenvalue is less than 1) - in relation to the Page Rank problem - is that it converges to that first eigenvector. EE 16B, Fall 2015, Note 22 2

3 Revisit of cases of real eigenvalues A is diagonalizable and n = 2 Case (b): λ 1,λ 2 R λ 1 < 1, λ 2 < 1 λ 1,λ 2 > 0. A is in general diagonalizable, not diagonal. Remark: If A is diagonal, then the eigenvectors v 1 and v 2 will be the x 1 and x 2 axes. In general, when A is diagonalizable, they are not the x 1 and x 2 axes, but we know that they are linearly independent, so they span R 2 Now let s "graph x(k)"... meaning, let s plot x 2 (k) vs x 1 (k). We know that the initial condition is a linear combination of the eigenvectors. Since v 1 and v 2 span R 2, x 0 could be anywhere. Now, we need to determine the solution as k goes to infinity. Recall: (b) Now, we re starting off with an initial condition where both coordinates are positive and equal to each other. The magnitude of the eigenvalues was 0.5 which tells us that whatever the initial condition is, we re going to see that the solution is: We only see the trajectory go in. If we start on v 1, we will stay on v 1. We will still converge to 0, but on v 1. EE 16B, Fall 2015, Note 22 3

4 If we start on v 2, we will converge to 0 and stay on v 2. If we start off the eigenvectors, we stay on a linear combination of the eigenvectors in a "star burst" pattern. Note: we are not plotting with respect to time. Case 2: λ 1,λ 2 R λ 1, λ 2 < 1 λ 1,λ 2 > 0. λ 1 = 0.1,λ 2 = 0.9 The eigenvector v 1 is the eigenvector corresponding to λ 1 so it is much closer in to the zero than v 2. Now, consider the initial point shown in green. The trajectory will converge towards v 2 as it goes toward the origin. If it starts on v 1, it will stay on v 1, and if starts on v 2, it will stay on v 2, but off of v 1, it will tend to converge to v 2. How they curve in depends on the relative magnitude of the eigenvalues. In general, we care about stability and the shape of the solution. Remember: x 0 = σ 1 v 1 + σ 2 v 2 if x 0 is on v 1 ; x 0 = σ 1 v 1. EE 16B, Fall 2015, Note 22 4

 from that point converging towards v 1 to the origin.")
5 Also, note that we cannot have solutions crossing in the plane. We will get a unique solution for each start point. Example: If we start on the positive real axis (shown in green), we will get the trajectory shown (also in green) from that point converging towards v 1 to the origin. Case 3: λ 1, λ 2 < 1 λ 1 > 0 > λ 2 EE 16B, Fall 2015, Note 22 5


6 If we start on v 1, we will stay on v 1 and converge to 0. If we start on v 2, we will stay on v 2, but we will jump back and forth between positive points and negative points on the v 2 line. The convergence to 0 will also happen faster since the eigenvalue is close to 0. We get the following trajectories: The geometry of the convergence depends on the eigenvectors, and it depends on the relative magnitudes of the eigenvalues with respect to the eigenvectors. Now, let s look at the "overshoot" case: We want it to step up and stay at 1, but we get oscillatory overshoot behavior. What does this say about the eigenvalue associated to x 1 (say, it s a diagonal system)? This is indicative of the eigenvalue being on the negative real axis. It is converging to something that is not zero, where it s magnitude has to be between 0 and Case 4: λ 1,λ 2 R λ 1,λ 2 > 0. λ 1 > 1 > λ 2. Again, if we start on an eigenvector, we will stay on an eigenvector, but now because the eigenvalue is EE 16B, Fall 2015, Note 22 6

 but the other eigenvalue is less than 1, then we get something called a \"saddle condition,\" and the trajectory")
7 greater than 1, the trajectory will go off the eigenvector, shown in the diagram. If we start at a point very close to v 1, the trajectory will take off in the v 1 direction. If we start at a point very close to v 2, the trajectory will start to go in the v 2 direction, but then turn around and take off in the v 1 direction. Remember, to be unstable, there needs to be an eigenvalue which is greater than 1. Also, if one of the eigenvalues is greater than 1 (which means that it is not stable) but the other eigenvalue is less than 1, then we get something called a "saddle condition," and the trajectory looks like the following: The reason it is called a "saddle" is because if we consider a saddle for a horse, and we roll a marble down the center line of the saddle, and it is perfect without noise, it s just going to converge at the center point. This EE 16B, Fall 2015, Note 22 7
 - Example: The case when the eigenvalues are complex.")

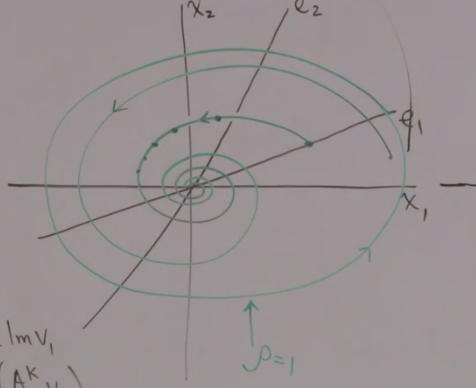
8 corresponds to our stable eigenvector. But as soon as we start at a point just off of that stable eigenvector, the trajectories should diverge away and go off to infinity. (Also, based on what we ve drawn, the eigenvalue of the stable eigenvector would be negative.) - Example: The case when the eigenvalues are complex. As we discussed, they have to appear in complex conjugate pairs. Case 5: λ 1,λ 2 C λ 1 = λ 2. v 1 = e 1 + je 2 v 2 = e 1 je 2 λ 1 = ρe jθ λ 2 = ρe jθ x 0 = αv 1 + ᾱv 2, α = α 1 + jα 2. So, x 0 = α 1 e 1 + α 2 e 2, where e 1 corresponds to the real part and e 2 corresponds to the imaginary part. Now, we no longer have the property that if we start on e 1, we will stay on e 1. EE 16B, Fall 2015, Note 22 8
 + jsin(θk)(e 1 + je 2 )) x(k) = α 1 ρ k cos(θk)e 1 + α 2 ρ k sin(θk)e 1 α 1 ρ k sin(θk)e 2 + α 2 ρ k cos(θk)e 2 In general, the solution will oscillate around the vectors v 1 and")

9 x 0 = α 1 e 1 + α 2 e 2 = α 1 Re(v 1 ) + α 2 Im(v 1 ) x(k) = A k x 0 = α 1 Re(A k v 1 ) + α 2 Im(A k v 1 ) = α 1 Re(λ k v 1 ) + α 2 Im(λ k v 1 ) x(k) = α 1 Re(ρ k (cos(θk) + jsin(θk)(e 1 + je 2 )) + α 2 Im(ρ k (cos(θk) + jsin(θk)(e 1 + je 2 )) x(k) = α 1 ρ k cos(θk)e 1 + α 2 ρ k sin(θk)e 1 α 1 ρ k sin(θk)e 2 + α 2 ρ k cos(θk)e 2 In general, the solution will oscillate around the vectors v 1 and v 2. The magnitude of the trajectory will depend on ρ, but the oscillation will depend on θ. In particular, at each time k, we will pick up a new point, and the frequency of that point depends on θk. So, we start off at some initial point. Then, the next point will have magnitude which is defined by the magnitude ρ and a phase which is defined by the phase of the eigenvalue times the particular value of k. If we have complex eigenvalue pairs which have magnitude greater than 1, then the spirals will basically go off to infinity. The trajectory will spiral out with growing and growing radius because of the dependence on ρ k - that magnitude will get greater and greater as k gets large. The complex component of the eigenvalues is contributing a phase which gives an oscillatory component in the underlying trajectory of the solution. Now, if ρ is 1, meaning the eigenvalues are on the unit circle, then the trajectory will be an ellipse. EE 16B, Fall 2015, Note 22 9


10 We give names to these trajectories. When it is spiraling in, it is called a "focus." When it is circling about in an oscillatory behavior, we call that a "center behavior." And the real cases done previously are called "nodes." EE 16B, Fall 2015, Note 22 10


11 EE 16B, Fall 2015, Note 22 11
MITOCW ocw f99-lec23_300k
 MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
Systems of Linear ODEs
 P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
Automatic Control Systems theory overview (discrete time systems)
") Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
ODE, part 2. Dynamical systems, differential equations
 ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
MTH 464: Computational Linear Algebra
 MTH 464: Computational Linear Algebra Lecture Outlines Exam 4 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University April 15, 2018 Linear Algebra (MTH 464)
MTH 464: Computational Linear Algebra Lecture Outlines Exam 4 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University April 15, 2018 Linear Algebra (MTH 464)
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d
; 9.5 Eigenvalues and Eigenvectors, cont d") Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Module 9: State Feedback Control Design Lecture Note 1
 Module 9: State Feedback Control Design Lecture Note 1 The design techniques described in the preceding lectures are based on the transfer function of a system. In this lecture we would discuss the state
Module 9: State Feedback Control Design Lecture Note 1 The design techniques described in the preceding lectures are based on the transfer function of a system. In this lecture we would discuss the state
NPTEL NATIONAL PROGRAMME ON TECHNOLOGY ENHANCED LEARNING IIT BOMBAY CDEEP IIT BOMBAY ADVANCE PROCESS CONTROL. Prof.
 NPTEL NATIONAL PROGRAMME ON TECHNOLOGY ENHANCED LEARNING IIT BOMBAY CDEEP IIT BOMBAY ADVANCE PROCESS CONTROL Prof. Sachin Patwardhan Department of Chemical Engineering, IIT Bombay Lecture No. 13 Stability
NPTEL NATIONAL PROGRAMME ON TECHNOLOGY ENHANCED LEARNING IIT BOMBAY CDEEP IIT BOMBAY ADVANCE PROCESS CONTROL Prof. Sachin Patwardhan Department of Chemical Engineering, IIT Bombay Lecture No. 13 Stability
DIAGONALIZATION. In order to see the implications of this definition, let us consider the following example Example 1. Consider the matrix
 DIAGONALIZATION Definition We say that a matrix A of size n n is diagonalizable if there is a basis of R n consisting of eigenvectors of A ie if there are n linearly independent vectors v v n such that
DIAGONALIZATION Definition We say that a matrix A of size n n is diagonalizable if there is a basis of R n consisting of eigenvectors of A ie if there are n linearly independent vectors v v n such that
Damped Oscillators (revisited)
") Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form
 Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Autonomous Systems and Stability
 LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
(Refer Slide Time: 00:32)
") Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
Eigenvalues, Eigenvectors, and an Intro to PCA
 Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
Copyright (c) 2006 Warren Weckesser
 2006 Warren Weckesser") 2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
Math 1270 Honors ODE I Fall, 2008 Class notes # 14. x 0 = F (x; y) y 0 = G (x; y) u 0 = au + bv = cu + dv
 y 0 = G (x; y) u 0 = au + bv = cu + dv") Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Eigenspaces in Recursive Sequences
 Eigenspaces in Recursive Sequences Ben Galin September 5, 005 One of the areas of study in discrete mathematics deals with sequences, in particular, infinite sequences An infinite sequence can be defined
Eigenspaces in Recursive Sequences Ben Galin September 5, 005 One of the areas of study in discrete mathematics deals with sequences, in particular, infinite sequences An infinite sequence can be defined
Name Solutions Linear Algebra; Test 3. Throughout the test simplify all answers except where stated otherwise.
 Name Solutions Linear Algebra; Test 3 Throughout the test simplify all answers except where stated otherwise. 1) Find the following: (10 points) ( ) Or note that so the rows are linearly independent, so
Name Solutions Linear Algebra; Test 3 Throughout the test simplify all answers except where stated otherwise. 1) Find the following: (10 points) ( ) Or note that so the rows are linearly independent, so
Phase portraits in two dimensions
 Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Rural/Urban Migration: The Dynamics of Eigenvectors
 * Analysis of the Dynamic Structure of a System * Rural/Urban Migration: The Dynamics of Eigenvectors EGR 326 April 11, 2019 1. Develop the system model and create the Matlab/Simulink model 2. Plot and
* Analysis of the Dynamic Structure of a System * Rural/Urban Migration: The Dynamics of Eigenvectors EGR 326 April 11, 2019 1. Develop the system model and create the Matlab/Simulink model 2. Plot and
Lecture Notes for Math 251: ODE and PDE. Lecture 27: 7.8 Repeated Eigenvalues
 Lecture Notes for Math 25: ODE and PDE. Lecture 27: 7.8 Repeated Eigenvalues Shawn D. Ryan Spring 22 Repeated Eigenvalues Last Time: We studied phase portraits and systems of differential equations with
Lecture Notes for Math 25: ODE and PDE. Lecture 27: 7.8 Repeated Eigenvalues Shawn D. Ryan Spring 22 Repeated Eigenvalues Last Time: We studied phase portraits and systems of differential equations with
Linear Algebra Practice Problems
 Linear Algebra Practice Problems Math 24 Calculus III Summer 25, Session II. Determine whether the given set is a vector space. If not, give at least one axiom that is not satisfied. Unless otherwise stated,
Linear Algebra Practice Problems Math 24 Calculus III Summer 25, Session II. Determine whether the given set is a vector space. If not, give at least one axiom that is not satisfied. Unless otherwise stated,
Homogeneous Constant Matrix Systems, Part II
 4 Homogeneous Constant Matrix Systems, Part II Let us now expand our discussions begun in the previous chapter, and consider homogeneous constant matrix systems whose matrices either have complex eigenvalues
4 Homogeneous Constant Matrix Systems, Part II Let us now expand our discussions begun in the previous chapter, and consider homogeneous constant matrix systems whose matrices either have complex eigenvalues
Modeling Prey and Predator Populations
 Modeling Prey and Predator Populations Alison Pool and Lydia Silva December 15, 2006 Abstract In this document, we will explore the modeling of two populations based on their relation to one another. Specifically
Modeling Prey and Predator Populations Alison Pool and Lydia Silva December 15, 2006 Abstract In this document, we will explore the modeling of two populations based on their relation to one another. Specifically
APPLICATIONS The eigenvalues are λ = 5, 5. An orthonormal basis of eigenvectors consists of
 CHAPTER III APPLICATIONS The eigenvalues are λ =, An orthonormal basis of eigenvectors consists of, The eigenvalues are λ =, A basis of eigenvectors consists of, 4 which are not perpendicular However,
CHAPTER III APPLICATIONS The eigenvalues are λ =, An orthonormal basis of eigenvectors consists of, The eigenvalues are λ =, A basis of eigenvectors consists of, 4 which are not perpendicular However,
Dynamical Systems. August 13, 2013
 Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
c 1 v 1 + c 2 v 2 = 0 c 1 λ 1 v 1 + c 2 λ 1 v 2 = 0
 LECTURE LECTURE 2 0. Distinct eigenvalues I haven t gotten around to stating the following important theorem: Theorem: A matrix with n distinct eigenvalues is diagonalizable. Proof (Sketch) Suppose n =
LECTURE LECTURE 2 0. Distinct eigenvalues I haven t gotten around to stating the following important theorem: Theorem: A matrix with n distinct eigenvalues is diagonalizable. Proof (Sketch) Suppose n =
Lecture 6 Positive Definite Matrices
 Linear Algebra Lecture 6 Positive Definite Matrices Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Spring 2017 2017/6/8 Lecture 6: Positive Definite Matrices
Linear Algebra Lecture 6 Positive Definite Matrices Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Spring 2017 2017/6/8 Lecture 6: Positive Definite Matrices
Appendix: A Computer-Generated Portrait Gallery
 Appendi: A Computer-Generated Portrait Galler There are a number of public-domain computer programs which produce phase portraits for 2 2 autonomous sstems. One has the option of displaing the trajectories
Appendi: A Computer-Generated Portrait Galler There are a number of public-domain computer programs which produce phase portraits for 2 2 autonomous sstems. One has the option of displaing the trajectories
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Linear Algebra Review
 Chapter 1 Linear Algebra Review It is assumed that you have had a course in linear algebra, and are familiar with matrix multiplication, eigenvectors, etc. I will review some of these terms here, but quite
Chapter 1 Linear Algebra Review It is assumed that you have had a course in linear algebra, and are familiar with matrix multiplication, eigenvectors, etc. I will review some of these terms here, but quite
Lecture 10: Powers of Matrices, Difference Equations
 Lecture 10: Powers of Matrices, Difference Equations Difference Equations A difference equation, also sometimes called a recurrence equation is an equation that defines a sequence recursively, i.e. each
Lecture 10: Powers of Matrices, Difference Equations Difference Equations A difference equation, also sometimes called a recurrence equation is an equation that defines a sequence recursively, i.e. each
Control Over Packet-Dropping Channels
 Chapter 6 Control Over Packet-Dropping Channels So far, we have considered the issue of reliability in two different elements of the feedback loop. In Chapter 4, we studied estimator-based methods to diagnose
Chapter 6 Control Over Packet-Dropping Channels So far, we have considered the issue of reliability in two different elements of the feedback loop. In Chapter 4, we studied estimator-based methods to diagnose
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Physics I: Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology. Indian Institute of Technology, Kharagpur
 Physics I: Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology Indian Institute of Technology, Kharagpur Lecture No 03 Damped Oscillator II We were discussing, the damped oscillator
Physics I: Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology Indian Institute of Technology, Kharagpur Lecture No 03 Damped Oscillator II We were discussing, the damped oscillator
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Eigenvalues, Eigenvectors, and an Intro to PCA
 Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
MATH 320, WEEK 11: Eigenvalues and Eigenvectors
 MATH 30, WEEK : Eigenvalues and Eigenvectors Eigenvalues and Eigenvectors We have learned about several vector spaces which naturally arise from matrix operations In particular, we have learned about the
MATH 30, WEEK : Eigenvalues and Eigenvectors Eigenvalues and Eigenvectors We have learned about several vector spaces which naturally arise from matrix operations In particular, we have learned about the
The Jordan Normal Form and its Applications
 The and its Applications Jeremy IMPACT Brigham Young University A square matrix A is a linear operator on {R, C} n. A is diagonalizable if and only if it has n linearly independent eigenvectors. What happens
The and its Applications Jeremy IMPACT Brigham Young University A square matrix A is a linear operator on {R, C} n. A is diagonalizable if and only if it has n linearly independent eigenvectors. What happens
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Designing Information Devices and Systems II Spring 2018 J. Roychowdhury and M. Maharbiz Discussion 6B
 EECS 16B Designing Information Devices and Systems II Spring 2018 J. Roychowdhury and M. Maharbiz Discussion 6B 1 Stability 1.1 Discrete time systems A discrete time system is of the form: xt + 1 A xt
EECS 16B Designing Information Devices and Systems II Spring 2018 J. Roychowdhury and M. Maharbiz Discussion 6B 1 Stability 1.1 Discrete time systems A discrete time system is of the form: xt + 1 A xt
Linear Algebra Review
 Chapter 1 Linear Algebra Review It is assumed that you have had a beginning course in linear algebra, and are familiar with matrix multiplication, eigenvectors, etc I will review some of these terms here,
Chapter 1 Linear Algebra Review It is assumed that you have had a beginning course in linear algebra, and are familiar with matrix multiplication, eigenvectors, etc I will review some of these terms here,
(a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? Solution: dim N(A) 1, since rank(a) 3. Ax =
 If A is a 3 by 4 matrix, what does this tell us about its nullspace? Solution: dim N(A) 1, since rank(a) 3. Ax =") . (5 points) (a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? dim N(A), since rank(a) 3. (b) If we also know that Ax = has no solution, what do we know about the rank of A? C(A)
. (5 points) (a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? dim N(A), since rank(a) 3. (b) If we also know that Ax = has no solution, what do we know about the rank of A? C(A)
Module 07 Controllability and Controller Design of Dynamical LTI Systems
 Module 07 Controllability and Controller Design of Dynamical LTI Systems Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ataha October
Module 07 Controllability and Controller Design of Dynamical LTI Systems Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ataha October
Eigenvalues, Eigenvectors, and an Intro to PCA
 Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
Eigenvalues, Eigenvectors, and an Intro to PCA Eigenvalues, Eigenvectors, and an Intro to PCA Changing Basis We ve talked so far about re-writing our data using a new set of variables, or a new basis.
Final Review Sheet. B = (1, 1 + 3x, 1 + x 2 ) then 2 + 3x + 6x 2
 then 2 + 3x + 6x 2") Final Review Sheet The final will cover Sections Chapters 1,2,3 and 4, as well as sections 5.1-5.4, 6.1-6.2 and 7.1-7.3 from chapters 5,6 and 7. This is essentially all material covered this term. Watch
Final Review Sheet The final will cover Sections Chapters 1,2,3 and 4, as well as sections 5.1-5.4, 6.1-6.2 and 7.1-7.3 from chapters 5,6 and 7. This is essentially all material covered this term. Watch
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]
![[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]](/thumbs/82/86615903.jpg "[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]") Math 43 Review Notes [Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty Dot Product If v (v, v, v 3 and w (w, w, w 3, then the
Math 43 Review Notes [Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty Dot Product If v (v, v, v 3 and w (w, w, w 3, then the
Matrices related to linear transformations
 Math 4326 Fall 207 Matrices related to linear transformations We have encountered several ways in which matrices relate to linear transformations. In this note, I summarize the important facts and formulas
Math 4326 Fall 207 Matrices related to linear transformations We have encountered several ways in which matrices relate to linear transformations. In this note, I summarize the important facts and formulas
Digital Control Systems State Feedback Control
 Digital Control Systems State Feedback Control Illustrating the Effects of Closed-Loop Eigenvalue Location and Control Saturation for a Stable Open-Loop System Continuous-Time System Gs () Y() s 1 = =
Digital Control Systems State Feedback Control Illustrating the Effects of Closed-Loop Eigenvalue Location and Control Saturation for a Stable Open-Loop System Continuous-Time System Gs () Y() s 1 = =
GROUP THEORY PRIMER. New terms: so(2n), so(2n+1), symplectic algebra sp(2n)
, so(2n+1), symplectic algebra sp(2n)") GROUP THEORY PRIMER New terms: so(2n), so(2n+1), symplectic algebra sp(2n) 1. Some examples of semi-simple Lie algebras In the previous chapter, we developed the idea of understanding semi-simple Lie algebras
GROUP THEORY PRIMER New terms: so(2n), so(2n+1), symplectic algebra sp(2n) 1. Some examples of semi-simple Lie algebras In the previous chapter, we developed the idea of understanding semi-simple Lie algebras
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Understand the existence and uniqueness theorems and what they tell you about solutions to initial value problems.
 Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
Solutions to Final Exam
 Solutions to Final Exam. Let A be a 3 5 matrix. Let b be a nonzero 5-vector. Assume that the nullity of A is. (a) What is the rank of A? 3 (b) Are the rows of A linearly independent? (c) Are the columns
Solutions to Final Exam. Let A be a 3 5 matrix. Let b be a nonzero 5-vector. Assume that the nullity of A is. (a) What is the rank of A? 3 (b) Are the rows of A linearly independent? (c) Are the columns
8 Eigenvectors and the Anisotropic Multivariate Gaussian Distribution
 Eigenvectors and the Anisotropic Multivariate Gaussian Distribution Eigenvectors and the Anisotropic Multivariate Gaussian Distribution EIGENVECTORS [I don t know if you were properly taught about eigenvectors
Eigenvectors and the Anisotropic Multivariate Gaussian Distribution Eigenvectors and the Anisotropic Multivariate Gaussian Distribution EIGENVECTORS [I don t know if you were properly taught about eigenvectors
Eigenvalues and Eigenvectors
 Eigenvalues and Eigenvectors Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Eigenvalues and Eigenvectors Fall 2015 1 / 14 Introduction We define eigenvalues and eigenvectors. We discuss how to
Eigenvalues and Eigenvectors Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Eigenvalues and Eigenvectors Fall 2015 1 / 14 Introduction We define eigenvalues and eigenvectors. We discuss how to
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
EE16B Designing Information Devices and Systems II
 EE6B M. Lustig, EECS UC Berkeley EE6B Designing Information Devices and Systems II Lecture 6B Cont. stability of Linear State Models Controllability Today Last time: Derived stability conditions for disc.
EE6B M. Lustig, EECS UC Berkeley EE6B Designing Information Devices and Systems II Lecture 6B Cont. stability of Linear State Models Controllability Today Last time: Derived stability conditions for disc.
Chapter 1 Review of Equations and Inequalities
 Chapter 1 Review of Equations and Inequalities Part I Review of Basic Equations Recall that an equation is an expression with an equal sign in the middle. Also recall that, if a question asks you to solve
Chapter 1 Review of Equations and Inequalities Part I Review of Basic Equations Recall that an equation is an expression with an equal sign in the middle. Also recall that, if a question asks you to solve
Math 1553 Worksheet 5.3, 5.5
 Math Worksheet, Answer yes / no / maybe In each case, A is a matrix whose entries are real a) If A is a matrix with characteristic polynomial λ(λ ), then the - eigenspace is -dimensional b) If A is an
Math Worksheet, Answer yes / no / maybe In each case, A is a matrix whose entries are real a) If A is a matrix with characteristic polynomial λ(λ ), then the - eigenspace is -dimensional b) If A is an
What is A + B? What is A B? What is AB? What is BA? What is A 2? and B = QUESTION 2. What is the reduced row echelon matrix of A =
 STUDENT S COMPANIONS IN BASIC MATH: THE ELEVENTH Matrix Reloaded by Block Buster Presumably you know the first part of matrix story, including its basic operations (addition and multiplication) and row
STUDENT S COMPANIONS IN BASIC MATH: THE ELEVENTH Matrix Reloaded by Block Buster Presumably you know the first part of matrix story, including its basic operations (addition and multiplication) and row
Linear Algebra Exercises
 9. 8.03 Linear Algebra Exercises 9A. Matrix Multiplication, Rank, Echelon Form 9A-. Which of the following matrices is in row-echelon form? 2 0 0 5 0 (i) (ii) (iii) (iv) 0 0 0 (v) [ 0 ] 0 0 0 0 0 0 0 9A-2.
9. 8.03 Linear Algebra Exercises 9A. Matrix Multiplication, Rank, Echelon Form 9A-. Which of the following matrices is in row-echelon form? 2 0 0 5 0 (i) (ii) (iii) (iv) 0 0 0 (v) [ 0 ] 0 0 0 0 0 0 0 9A-2.
MAT 22B - Lecture Notes
 MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
Symbolic Dynamics of Digital Signal Processing Systems
 Symbolic Dynamics of Digital Signal Processing Systems Dr. Bingo Wing-Kuen Ling School of Engineering, University of Lincoln. Brayford Pool, Lincoln, Lincolnshire, LN6 7TS, United Kingdom. Email: wling@lincoln.ac.uk
Symbolic Dynamics of Digital Signal Processing Systems Dr. Bingo Wing-Kuen Ling School of Engineering, University of Lincoln. Brayford Pool, Lincoln, Lincolnshire, LN6 7TS, United Kingdom. Email: wling@lincoln.ac.uk
MIT Final Exam Solutions, Spring 2017
 MIT 8.6 Final Exam Solutions, Spring 7 Problem : For some real matrix A, the following vectors form a basis for its column space and null space: C(A) = span,, N(A) = span,,. (a) What is the size m n of
MIT 8.6 Final Exam Solutions, Spring 7 Problem : For some real matrix A, the following vectors form a basis for its column space and null space: C(A) = span,, N(A) = span,,. (a) What is the size m n of
Pre-Calculus Notes Section 12.2 Evaluating Limits DAY ONE: Lets look at finding the following limits using the calculator and algebraically.
 Pre-Calculus Notes Name Section. Evaluating Limits DAY ONE: Lets look at finding the following its using the calculator and algebraicall. 4 E. ) 4 QUESTION: As the values get closer to 4, what are the
Pre-Calculus Notes Name Section. Evaluating Limits DAY ONE: Lets look at finding the following its using the calculator and algebraicall. 4 E. ) 4 QUESTION: As the values get closer to 4, what are the
4F3 - Predictive Control
 4F3 Predictive Control - Discrete-time systems p. 1/30 4F3 - Predictive Control Discrete-time State Space Control Theory For reference only Jan Maciejowski jmm@eng.cam.ac.uk 4F3 Predictive Control - Discrete-time
4F3 Predictive Control - Discrete-time systems p. 1/30 4F3 - Predictive Control Discrete-time State Space Control Theory For reference only Jan Maciejowski jmm@eng.cam.ac.uk 4F3 Predictive Control - Discrete-time
Linear Algebra Review
 Appendix E Linear Algebra Review In this review we consider linear equations of the form Ax = b, where x R n, b R m, and A R m n. Such equations arise often in this textbook. This review is a succinct
Appendix E Linear Algebra Review In this review we consider linear equations of the form Ax = b, where x R n, b R m, and A R m n. Such equations arise often in this textbook. This review is a succinct
Real Analysis Prof. S.H. Kulkarni Department of Mathematics Indian Institute of Technology, Madras. Lecture - 13 Conditional Convergence
 Real Analysis Prof. S.H. Kulkarni Department of Mathematics Indian Institute of Technology, Madras Lecture - 13 Conditional Convergence Now, there are a few things that are remaining in the discussion
Real Analysis Prof. S.H. Kulkarni Department of Mathematics Indian Institute of Technology, Madras Lecture - 13 Conditional Convergence Now, there are a few things that are remaining in the discussion
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
1. What is the determinant of the following matrix? a 1 a 2 4a 3 2a 2 b 1 b 2 4b 3 2b c 1. = 4, then det
 What is the determinant of the following matrix? 3 4 3 4 3 4 4 3 A 0 B 8 C 55 D 0 E 60 If det a a a 3 b b b 3 c c c 3 = 4, then det a a 4a 3 a b b 4b 3 b c c c 3 c = A 8 B 6 C 4 D E 3 Let A be an n n matrix
What is the determinant of the following matrix? 3 4 3 4 3 4 4 3 A 0 B 8 C 55 D 0 E 60 If det a a a 3 b b b 3 c c c 3 = 4, then det a a 4a 3 a b b 4b 3 b c c c 3 c = A 8 B 6 C 4 D E 3 Let A be an n n matrix
Section 5.5. Complex Eigenvalues
 Section 5.5 Complex Eigenvalues A Matrix with No Eigenvectors Consider the matrix for the linear transformation for rotation by π/4 in the plane. The matrix is: A = 1 ( ) 1 1. 2 1 1 This matrix has no
Section 5.5 Complex Eigenvalues A Matrix with No Eigenvectors Consider the matrix for the linear transformation for rotation by π/4 in the plane. The matrix is: A = 1 ( ) 1 1. 2 1 1 This matrix has no
Recitation 8: Graphs and Adjacency Matrices
 Math 1b TA: Padraic Bartlett Recitation 8: Graphs and Adjacency Matrices Week 8 Caltech 2011 1 Random Question Suppose you take a large triangle XY Z, and divide it up with straight line segments into
Math 1b TA: Padraic Bartlett Recitation 8: Graphs and Adjacency Matrices Week 8 Caltech 2011 1 Random Question Suppose you take a large triangle XY Z, and divide it up with straight line segments into
MITOCW watch?v=poho4pztw78
 MITOCW watch?v=poho4pztw78 GILBERT STRANG: OK. So this is a video in which we go for second-order equations, constant coefficients. We look for the impulse response, the key function in this whole business,
MITOCW watch?v=poho4pztw78 GILBERT STRANG: OK. So this is a video in which we go for second-order equations, constant coefficients. We look for the impulse response, the key function in this whole business,
MITOCW watch?v=ztnnigvy5iq
 MITOCW watch?v=ztnnigvy5iq GILBERT STRANG: OK. So this is a "prepare the way" video about symmetric matrices and complex matrices. We'll see symmetric matrices in second order systems of differential equations.
MITOCW watch?v=ztnnigvy5iq GILBERT STRANG: OK. So this is a "prepare the way" video about symmetric matrices and complex matrices. We'll see symmetric matrices in second order systems of differential equations.
systems of linear di erential If the homogeneous linear di erential system is diagonalizable,
 G. NAGY ODE October, 8.. Homogeneous Linear Differential Systems Section Objective(s): Linear Di erential Systems. Diagonalizable Systems. Real Distinct Eigenvalues. Complex Eigenvalues. Repeated Eigenvalues.
G. NAGY ODE October, 8.. Homogeneous Linear Differential Systems Section Objective(s): Linear Di erential Systems. Diagonalizable Systems. Real Distinct Eigenvalues. Complex Eigenvalues. Repeated Eigenvalues.
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Matrices and Deformation
 ES 111 Mathematical Methods in the Earth Sciences Matrices and Deformation Lecture Outline 13 - Thurs 9th Nov 2017 Strain Ellipse and Eigenvectors One way of thinking about a matrix is that it operates
ES 111 Mathematical Methods in the Earth Sciences Matrices and Deformation Lecture Outline 13 - Thurs 9th Nov 2017 Strain Ellipse and Eigenvectors One way of thinking about a matrix is that it operates
MITOCW ocw f99-lec30_300k
 MITOCW ocw-18.06-f99-lec30_300k OK, this is the lecture on linear transformations. Actually, linear algebra courses used to begin with this lecture, so you could say I'm beginning this course again by
MITOCW ocw-18.06-f99-lec30_300k OK, this is the lecture on linear transformations. Actually, linear algebra courses used to begin with this lecture, so you could say I'm beginning this course again by
9.4 Polar Coordinates
 9.4 Polar Coordinates Polar coordinates uses distance and direction to specify a location in a plane. The origin in a polar system is a fixed point from which a ray, O, is drawn and we call the ray the
9.4 Polar Coordinates Polar coordinates uses distance and direction to specify a location in a plane. The origin in a polar system is a fixed point from which a ray, O, is drawn and we call the ray the
Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW
 Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW Objective The purpose of this lab is to increase your familiarity with LabVIEW, increase your mechanical modeling prowess, and give you simulation
Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW Objective The purpose of this lab is to increase your familiarity with LabVIEW, increase your mechanical modeling prowess, and give you simulation
(b) If a multiple of one row of A is added to another row to produce B then det(b) =det(a).
 If a multiple of one row of A is added to another row to produce B then det(b) =det(a).") .(5pts) Let B = 5 5. Compute det(b). (a) (b) (c) 6 (d) (e) 6.(5pts) Determine which statement is not always true for n n matrices A and B. (a) If two rows of A are interchanged to produce B, then det(b)
.(5pts) Let B = 5 5. Compute det(b). (a) (b) (c) 6 (d) (e) 6.(5pts) Determine which statement is not always true for n n matrices A and B. (a) If two rows of A are interchanged to produce B, then det(b)
Quantum Mechanics- I Prof. Dr. S. Lakshmi Bala Department of Physics Indian Institute of Technology, Madras
 Quantum Mechanics- I Prof. Dr. S. Lakshmi Bala Department of Physics Indian Institute of Technology, Madras Lecture - 6 Postulates of Quantum Mechanics II (Refer Slide Time: 00:07) In my last lecture,
Quantum Mechanics- I Prof. Dr. S. Lakshmi Bala Department of Physics Indian Institute of Technology, Madras Lecture - 6 Postulates of Quantum Mechanics II (Refer Slide Time: 00:07) In my last lecture,
6 EIGENVALUES AND EIGENVECTORS
 6 EIGENVALUES AND EIGENVECTORS INTRODUCTION TO EIGENVALUES 61 Linear equations Ax = b come from steady state problems Eigenvalues have their greatest importance in dynamic problems The solution of du/dt
6 EIGENVALUES AND EIGENVECTORS INTRODUCTION TO EIGENVALUES 61 Linear equations Ax = b come from steady state problems Eigenvalues have their greatest importance in dynamic problems The solution of du/dt
Differential Equations
 This document was written and copyrighted by Paul Dawkins. Use of this document and its online version is governed by the Terms and Conditions of Use located at. The online version of this document is
This document was written and copyrighted by Paul Dawkins. Use of this document and its online version is governed by the Terms and Conditions of Use located at. The online version of this document is
Analysis of Discrete-Time Systems
 TU Berlin Discrete-Time Control Systems 1 Analysis of Discrete-Time Systems Overview Stability Sensitivity and Robustness Controllability, Reachability, Observability, and Detectabiliy TU Berlin Discrete-Time
TU Berlin Discrete-Time Control Systems 1 Analysis of Discrete-Time Systems Overview Stability Sensitivity and Robustness Controllability, Reachability, Observability, and Detectabiliy TU Berlin Discrete-Time
Modeling Prey-Predator Populations
 Modeling Prey-Predator Populations Alison Pool and Lydia Silva December 13, 2006 Alison Pool and Lydia Silva () Modeling Prey-Predator Populations December 13, 2006 1 / 25 1 Introduction 1 Our Populations
Modeling Prey-Predator Populations Alison Pool and Lydia Silva December 13, 2006 Alison Pool and Lydia Silva () Modeling Prey-Predator Populations December 13, 2006 1 / 25 1 Introduction 1 Our Populations
Linear Algebra, Summer 2011, pt. 2
 Linear Algebra, Summer 2, pt. 2 June 8, 2 Contents Inverses. 2 Vector Spaces. 3 2. Examples of vector spaces..................... 3 2.2 The column space......................... 6 2.3 The null space...........................
Linear Algebra, Summer 2, pt. 2 June 8, 2 Contents Inverses. 2 Vector Spaces. 3 2. Examples of vector spaces..................... 3 2.2 The column space......................... 6 2.3 The null space...........................
Designing Information Devices and Systems I Spring 2019 Lecture Notes Note 10
 EECS 6A Designing Information Devices and Systems I Spring 209 Lecture Notes Note 0 0. Change of Basis for Vectors Previously, we have seen that matrices can be interpreted as linear transformations between
EECS 6A Designing Information Devices and Systems I Spring 209 Lecture Notes Note 0 0. Change of Basis for Vectors Previously, we have seen that matrices can be interpreted as linear transformations between
A Brief Outline of Math 355
 A Brief Outline of Math 355 Lecture 1 The geometry of linear equations; elimination with matrices A system of m linear equations with n unknowns can be thought of geometrically as m hyperplanes intersecting
A Brief Outline of Math 355 Lecture 1 The geometry of linear equations; elimination with matrices A system of m linear equations with n unknowns can be thought of geometrically as m hyperplanes intersecting
Properties of Open-Loop Controllers
 Properties of Open-Loop Controllers Sven Laur University of Tarty 1 Basics of Open-Loop Controller Design Two most common tasks in controller design is regulation and signal tracking. Regulating controllers
Properties of Open-Loop Controllers Sven Laur University of Tarty 1 Basics of Open-Loop Controller Design Two most common tasks in controller design is regulation and signal tracking. Regulating controllers
Understanding the Matrix Exponential
 Transformations Understanding the Matrix Exponential Lecture 8 Math 634 9/17/99 Now that we have a representation of the solution of constant-coefficient initial-value problems, we should ask ourselves:
Transformations Understanding the Matrix Exponential Lecture 8 Math 634 9/17/99 Now that we have a representation of the solution of constant-coefficient initial-value problems, we should ask ourselves:
Chapter 1A -- Real Numbers. iff. Math Symbols: Sets of Numbers
 Fry Texas A&M University! Fall 2016! Math 150 Notes! Section 1A! Page 1 Chapter 1A -- Real Numbers Math Symbols: iff or Example: Let A = {2, 4, 6, 8, 10, 12, 14, 16,...} and let B = {3, 6, 9, 12, 15, 18,
Fry Texas A&M University! Fall 2016! Math 150 Notes! Section 1A! Page 1 Chapter 1A -- Real Numbers Math Symbols: iff or Example: Let A = {2, 4, 6, 8, 10, 12, 14, 16,...} and let B = {3, 6, 9, 12, 15, 18,
Slope Fields: Graphing Solutions Without the Solutions
 8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,