SIMULINK. MATLAB Softver za modeliranje, simulaciju i analizu dinamičkih sistema
|
|
|
- Ashley Lyons
- 6 years ago
- Views:
Transcription
1 SIMULINK MATLAB Softver za modeliranje, simulaciju i analizu dinamičkih sistema
2 Uopšteno o SIMULINK-u upotrebljava se za simulaciju dinamike sistema (u grafičkom okruženju) mogu se analizirati linearni, nelinearni, vremenski kontinualni ili diskretni multivarijabilni sistemi sa koncentrisanim parametrima radi kao proširenje MATLAB-a dodaje osobine karakteristične dinamičkim sistemima zadržava MATLAB-ovu funkcionalnost koristi se blok dijagram prozor kao glavni grafički alat model se formira kao blok dijagram upotrebom miša simulacija se ostvaruje upotrebom SIMULINK funkcija za numeričko rešavanje običnih diferencijalnih jednačina prvog reda
3 Upotreba SIMULINK-a upotrebljava se u dve faze formiranje simulacionog modela (Model-Based Design) analiza modela - simulacije U praksi se primenjuju oba koraka iterativno dok se ne dostignu željena ponašanja. Preporučuje se formiranje novog modela na osnovu postojedeg, tj. ne treba raditi sve iz početka.
4 Simulink proširenja Brojni hardver i softver se oslanjaju/proširuju Simulink Stateflow uvodi rad sa dijagramima stanja. Real-Time Workshop generiše C kod za real-time implementacije sistema u proizvodnji, dizajn embedded system-a. xpc Target zajedno sa x86-zasnovanim real-time sistemima pruža okruženje za simulacije i testiranje Simulink i Stateflow modela u relanom vremenu na PC računarima. Podržane su i druge brojne platforme (Infineon C166, Motorola 68HC12, Motorola MPC 555, TI C2000, TI C6000). Simulink HDL Coder omogudava automatsko generisanje VHDL i Verilog-a. SimEvents dodaje biblioteku grafičkih blokova za modelovanje redova čekanja. Pored vremenski zasnovanih (time-based) simulacija dodaje i vremenski diskretne simulacije zasnovane na događajima (event-based).
5 Formiranje simulacionog modela upotrebljavaju se blokovi tipična upotreba formiranje modela podseda na crtanje blok-dijagrama postoje biblioteke blokova Standardna, proširiva SIMULINK biblioteka korisnikova biblioteka blokovi se kopiraju iz biblioteke i povezuju vizuelno Kod složenih modela blokovi se mogu grupisati u hijerarhije blokovi poseduju parametre koji se postavljaju na željene vrednosti parametri blokova se mogu menjati i u toku simulacije programski interfejs (API) omogudava povezivanje sa proširenjima (simulacionim programima) i pisanje MATLAB koda.

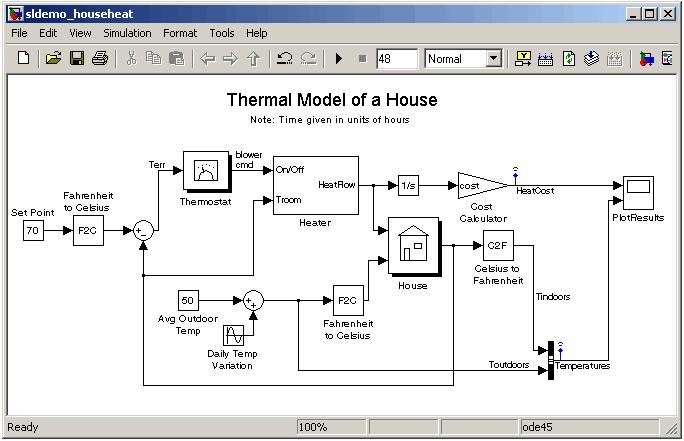
6 Primer modela

7 Simulink okruženje

8 Primer jednostavnog modela Generator signala 2 Pojacanje Mux Multiplekser Graf pera u MAT LAB
9 Blokovi Veliki broj predefinisanih blokova organizovanih u grupe blokova Continuous and discrete dynamics blocks, sadrže Integration, Unit Delay,... Algorithmic blocks, sadrže Sum, Product, Lookup Table,... Structural blocks, sadrže Mux, Switch, Bus Selector,... Blokovi se mogu prilagoditi (kastomizovati) ličnim potrebama i grupisati u vlastite biblioteke blokova Dodatne grupe blokova donose MATLAB proširenja Za aerospace, communications, radio frequency, signal processing, video and image processing,... Proširenja za modelovanje fizičkih sistema (mehaničkih, električnih, hidrauličnih komponenti): Simscape, SimDriveline, SimHydraulics, SimMechanics, SimPowerSystems.

10 Kontinualni i Diskontinualni blokovi
11 Blokovi Ulaza (izvora) i Izlaza (ponora)
12 Matematičke operacije

13 Rutiranje signala, Korisnikove f-je, Logičke i bit op.
14 Izgradnja modela Zasniva se na dovlačenju (drag & drop) blokova iz bibliotreke u grafički editor i njihovom povezivanju linijama koje uspostavljaju matematičke relacije. Model se može urediti upotrebom operacija poput: copy, paste, undo, align, distribute, resize. Model se može organizovati u nekoliko nivoa upotrebom hijerarhija podsistema i model referenci. Podsistem enkapsulira grupu blokova i signala u jedan blok Podsistemu se može kreirati izgled tako da se prikazuje kao atomski (nedeljiv) blok sa svojom slikom (ikonom) i okvirom dijaloga za unos parametara bloka (maskom). Pojedinačne komponente modela se mogu nezavisno simulirati, verifikovati, snimati u biblioteke komponente/podsistemi se mogu referencirati u modelima gde su upotrebljene Biblioteke su kompatibilne sa configuration management sistemima, poput CVS, ClearCase,...
15 Uslovno izvršavanje podsistema Tokom testiranja se mogu omoguditi/onemogučiti izvršavanja delova dizajniranog modela To se postiže upravljanjem logičkim signalima Logički signali pokredu izvršavanje podsistema u predefinisanim trenucima ili zasnovano na događajima u sistemu Složena logika takvih signala se može realizovati upotrebom dijagrama stanja u alatu Stateflow
16 Signali i parametri modela Mogu se definisati atributi signala i parametri pridruženi modelu Signali su vremenski promenljive vrednosti predstavljene linijama koje povezuju blokove Parametri su koeficijenti koji pomažu u definsanju dinamike i ponašanja sistema Atributi signala i parametara se mogu direktno postaviti na dijagramu modela ili u posebnom data dictionary Model Explorer omogudava uređenje data dictionary-ja Atributi signala i parametara: Tip podatka single, double, signed or unsigned 8-, 16- or 32-bit integers; Boolean; fixed-point Dimenzionlanost scalar, vector, matrix, or N-D arrays Realna ili kompleksna vrednost Min i max opseg, početna vrednost, inženjerske jedinice
17 Podržani su Pokretanje simulacije fixed-step and variable-step solveri, grafički debugger, model profiler. Simulacije se mogu pokretati interaktivno upotrebom Simulink GUI ili iz MATLAB komandne linije (m-datoteka) Modovi simulacija su: Normalan (podrazumevan) model se interpretira Accelerator ubrzava simulaciju kompajliranjem koda i dozvoljavanjem izmena parametara modela (blokova) Rapid Accelerator brži od Accelerator moda, ali sa manje interaktivnosti gde se izvršavanje odvija odvojeno od Simulink-a Postoje MATLAB komande za učitavanje i procesiranje podataka modela, parametara i vizuelizaciju rezultata.
18 Solveri Solveri su numerički integracioni algoritmi koji računaju vremenske promene promenljivih stanja modela Podržane su simulacije brojnih tipova modela, poput: vremenski kontinualnih (analog), vremenski diskretnih (digital), hibridnih (mixed-signal), i multirate sistema (sa više perioda odabiranja). Solveri mogu simulirati stiff sisteme i sisteme sa diskretnim promenama stanja (diskontinuiteti, trenutne promene dinamike). Parametri simulacionog algoritma se mogu podešavati. Uključuju: Tip i osobine solvera Početno i krajnje vreme simulacije Da li se učitavaju ili snimaju simulacioni podaci? Optimizacione i dijagnostičke informacije Podešenja se mogu snimiti sa modelom


19 Primer formiranja modela dinamičkog sistema
20 Primer
21 Pojedini podsistemi primera

22 Pregled rezultata simulacije primera
23 Osnovne grupe blokova (v4) ulazi - Sources izlazi - Sinks diskretni sistemi - Discrete linearni sistemi - Linear nelinearni sistemi - Nonlinear veze između blokova - Connections dodatni blokovi - Extras Sources Sinks Discrete Linear NonlinearConnections Extras SIMULINK Block Library (Version 1.3c)
24 Blokovi ulaza (v4) generator vremena - Clock generator diskretnog vremena - Digital clock generisanje vremenske funkcije tabelom koja se periodično ponavlja - Repeating Sequence generator konstantne vrednosti - Constant generator signala: sinusni, četvrtke, trougaoni ili beli šum - Signal Generator generator impulsa - Pulse Generator generator sinusnog oblika - Sine Wave generator jedinične funkcije - Step Input Signal Generator Sine Wave untitled.mat From File Random Number Signal S ource Library Digital Clock Repeating 1 Sequence Constant Step Input Band-Limi ted White Noise Chirp S ignal generator funkcije definisane podacima iz MAT datoteke - From File generator funkcije definisane podacima iz radnog prostora - From Workspace generator sinusnog oblika sa linearno rastudom frekvencijom - Chirp Signal generator serije slučajnih brojeva - Random Number generator ograničenog belog šuma - Band-Limited White Noise Clock 12:34 [T,U] From Workspace Pulse Generator
25 grafički prozor za prikaz vremenske promene veličina - Scope, Graph, Auto-Scale Graph Blokovi izlaza (v4) grafički prozor za prikaz promene jedne veličine u zavisnosti od druge - XY Graph smeštanje rezultata u MATLAB promenljivu - To Workspace smeštanje rezultata u MAT datoteku - To File zaustavljanje simulacije (kada je ulaz u blok <>0) - Stop Simulation promena koraka integracije (obično pri pojavi diskontinuiteta) - Hit Crossing Signal Sinks Library Scope Graph STOP Auto-S calestop S imulation Graph XY Gra ph yout To Workspace untitled.mat To File Hit Crossing
26 Blokovi vremenski diskretnih sistema (v4) kašnjenje jedne periode odabiranja - Unit Delay digitalni filter - Filter zadavanje linearnog model diskretnog sistema: u prostoru stanja - Discrete State-Space preko polinoma funkcije prenosa - Discrete Transfer Fcn preko nula i polova - Discrete Zero-Pole produživači signala nultog reda - Zero-Order Hold prvog reda - First-Order Hold Discrete-T ime Library 1/z Unit Delay 1 1+2z -1 Filter Zero-Order Hold (z-1) z(z-0.5) Discrete Zero-Pole diskretni integrator - Discrete-Time Integrator i integrator sa ograničavačem - Discrete-Time Limited Integrator 1 z+0.5 Discrete Transfer Fcn x(n+1)=ax(n)+bu(n) y(n)=cx(n)+du(n) Discrete S tate-space 1 z-1 First-Order Hold Discrete-T ime Discrete-T ime Integrator Limited Integrator
27 Blokovi linearnih sistema (v4) sabirač - Sum množač (unutrašnji proizvod vektora) - Inner Product Integrator diferencijator - Derivative pojačavač - Gain matrični pojačavač - Matrix Gain klizač kao pojačavač - Slider Gain zadavanje linearnog kontinualnog modela sistema: u prostoru stanja - State-Space preko polinoma funkcije prenosa - Transfer Fcn preko nula i polova - Zero-Pole + Sum 1/s Integrator 1 Gain 1 Linear Library K Matrix Gain s+1 Transfer Fcn x' = Ax+Bu y = Cx+Du. Inner Product du/dt Derivative 1.04 Slider Gain (s-1) s(s+1) State-S pace Zero-Po le
28 Nelinearne komp. (v4) Nonlinear Library znak broja (1,0,-1) - Sign apsolutna vrednost - Abs Sign Relay Backlash proizvod - Product Quantizer Dead Zone Coulombic Friction funkcija - Fcn * Abs histerezis - Backlash Product Abs Look-Up Table zona neosetljivosti - Dead Zone >= AND ograničavač gradijenta - Relational Logical Combinatorial Rate Limiter Operator Operator Logic zavisnost izlaza od ulaza data f(u) system MATLAB Function 1/s tablicom - Look-Up Table Fcn S-Function MAT LAB Fcn zavisnost izlaza od dva ulaza data tablicom - 2-D Look-Up Table 1/s relej - Relay Memory Transport Variable Delay prekidač, izlaz se prebacuje kada srednji ulaz pređe preko Transport zadate Delay vrednosti (parametra) - Switch transportno kašnjenje - Transport Delay... Saturation Rate Limiter 2-D Look-Up Table Switch Reset Integrator Limited Integrator
29 Nelinearne komponente - nastavak promenljivo transportno kašnjenje - Variable Transport Delay funkcija MATLAB-a - MATLAB Fcn S-Function diskretizovanje ulaza - Quantizer statičko trenje - Coulombic Friction relacioni operator - Relational Operator logički operator - Logical Operator kombinatorno logičko kolo - Combinatiorial Logic memorija (uvodi kašnjenje od jednog koraka integracije) - Memory integrator sa ograničavačem - Limited Integrator
30 Blokovi za veze (v4) multiplekser - Mux (upotrebljava se za grupisanje signala) demultiplekser - Demux ulaz u posmatrani model - Inport izlaz iz posmatranog modela - Outport Connections Library 1 Inport 1 Outport Mux Mux Demux Demux
31 Dodatni blokovi DEMOS Posebni blokovi (v4) primeri Flip-Flop-ovi: Latch, SR, D, JK kontroleri i PID kontroleri niskopropusni, visokopropusni i pojasni filtri analiza signala: auto i kros korelacija, spektar, spektar snage prevođenje koordinata između polarnog i Dekartovog koordinatnog sistema blokovi drugih Toolbox-ova identifikaciju sistema veštačke neuronske mreže analizu robustnosti sistema,... Additional blocks using the mask utility (documented in release notes): Controllers Conversion Filters SIMULINK Demos System ID Block Library Most commonly used blocks Flip-Flops PID ControllersAnalyzers Blocks and demos which require toolboxes: Robust Control Demos MuTools Demos Neural Networks
32 Analiza modela ugrađeni su brojni alati za analizu modela različiti simulacioni algoritmi formiranje linearnog modela sistema (linearizacija modela) nalaženje stacionarnih stanja tok simulacije se može pratiti tokom njenog rada krajnji rezultati se mogu preneti u MATLAB-ovo okruženje
33 Analiza modela načini upotrebe 1. potpuno interaktivan rad komande se zadaju iz menija rezultati se posmatraju u grafičkim prozorima Simulink-a 2. pokretanje simulacije iz MATLAB-a model se može formirati interaktivno pokretanje simulacije i preuzimanje rezultata se radi u MATLAB-u Postupak je fleksibilniji od predhodnog jer se dobijeni rezultati mogu dodatno obraditi upotrebom MATLAB-a 3. upotreba S-funkcija model dela sistema se opiše programski S-funkcijom postoji blok S-Function Ne postoji jasna granica izmeđe upotrebe ova tri načina, tj. načini se međusobno preklapaju. Način analize modela obično zavisi od faze razvoja modela.

 rezulatate.")
34 Analiza modela - Simulacija simulacija uključuje numeričku integraciju skupa diferencijalnih jednačina postoji nekoliko algoritama za integraciju: sa promenljivim korakom integracije sa fiksnim korakom integracije Zbog razlika u dinamičkom ponašanju različitih sistema, ni jedan algoritam ne garantuje da de za svaki model davati tačne i efikasne (brze) rezulatate. Za dobijanje tačnih rezultata treba požljivo izabrati metodu integracije i postaviti njene parametre.
35 iz menija iz komandne linije - MATLAB-a Pokretanje simulacije pokretanje simulacije iz MATLAB-a u odnosu na pokretanje simulacije iz menija ima vedu fleksibilnost, mogu se: zadati početna stanja formirati spoljašnji ulazi preko dodatne promenljive ut pokretati simulacije iz MATLAB skript datoteke, gde se parametri mogu programski menjati

36 Pokretanje simulacije iz menija Parametri algoritma se posebno postavljaju u dijalogu (v4): izbor algoritma integracije vremena početka i kraja simulacije: tstart i tfinal tolerancija, min. i maks. korak integracije: tol, minstep, maxstep imena promenljivih sa rezultatima simulacije: txy (vreme, prom. stanja, izlazi sistema kao [t,x,y]) Mogudnost izbora integracionog algoritma fiksnog i promenljivog koraka v7
37 Pokretanje simulacije iz komandne linije (v7) *t,x,y+ = sim( model,<timespan>,<options>,ut, p1, p2, ) <TIMESPAN> se zadaje na jedan od načina: TFinal, [TStart TFinal], ili [TStart OutputTimes TFinal]. <OPTIONS> se postavlja upotrebom simset UT = [T, U1,... Un] Primeri: sim( model',tfinal) *t,x,y+=sim( model',tfinal) sim( model',[tstart tfinal],simset('initialstate',x0)) sim( model',[tstart tfinal],simset('initialstate',1,'solver','ode23'))
38 Pokretanje simulacije iz komandne linije (v4) Parametri algoritma se zadaju kao argumenti *t,x,y+ = linsim( model, *tstart,tfinal+, x0, *tol,minstep,maxstep+, UT, p1, p2, ); ili krade, gde pojedini parametri imaju podrazumevane vrednosti *t,x,y+ = linsim( model, tfinal );
39 Izlazi modela - prikaz rezultata 1. Označavanje izlaza blokom za izlaz modela - prenos vrednosti kao izlaza modela u MATLAB - Prenos vrednosti kao ulaz u druge Simulink blokove 2. Grafički prikaz trajektorije pomodu Graph blokova 3. Prenos vrednosti u MATLAB pomodu To Workspace bloka 4. Zapis u datoteku - To File blok Step Input Step Input1 1 s+1 Transfer Fcn 1 s+1 Transfer Fcn1 Graph 1 Outport Step Input2 1 yout s+1 To Workspace Transfer Fcn2
40 Početna stanja primenjuju se u trenutku tstart nalaze se u samim blokovima mogu se postaviti (promeniti) iz komandne linije [t,x,y] = sim( model',tfinal,simset('initialstate',x0)) %v7 [t,x,y] = linsim( model, tfinal, x0 ) %v4 početna stanja postojedeg modela se mogu očitati pomodu [sizes,x0] = model sizes su podaci u modelu: broj ulaza, izlaza,...
41 Algebarske petlje 1 Constant + - Sum 1 Gain x To Workspace algebarske ili implicitne petlje se javljaju kada dva ili više blokova imaju direktan prenos svojih ulaza i formiraju povratnu spregu rešavaju se iterativno (u najviše 200 iteracija Newton-Raphson tehnikom) znatno umanjuju brzinu simulacije i treba ih izbegavati javljaju se kod: blokova sa pojačanjima vedine nelinearnih blokova funkcija prenosa sa jednakim stepenima brojioca i imenioca ili jednakim brojem nula i polova modela u prostoru stanja sa nenultom matricom D
42 Interpolacija podataka potrebna je zbog promenljivog koraka integracije dobijaju se neekvidistantne tačke koje se teško upoređuju MATLAB-ove funkcije za interpolaciju podataka procenjuju vrednosti u vremenskim trenucima različitim od poznatih metode: linearna interpolacija yint = table1( [ t, y ], tint ) interpolacija polinomom (1-D biharmonična interpolacija) yint = interp2( t, y, tint ) interpolacija kubnim splajnom yint = spline( t, y, tint ) Ove funkcije imaju i dodatne parametre.
43 Osobine simulacionih algoritama (v4) linsim upotrebljava se za linearne sisteme sa: funk. prenosa, modelima u prostoru stanja, modelima preko nula i polova, sabiračima i pojač. može se upotrebiti i za sisteme koji sadrže nelinearne elemente, ali ako su sastavljeni pretežno od linearnih elem. dobar je za stiff sisteme - sisteme sa jednovremeno prisutnom i brzom i sporom dinamikom rk23, rk45 najbolji za izrazito nelinearne i diskontinualne sisteme dobar za mešane kontinualne i diskretne sisteme loš za stiff sisteme...
44 gear Osobine simulacionih algoritama - nastavak... dobar za nelinearne i glatke sisteme dizajniran za stiff sisteme, a manje je efikasan za ostale loš za sisteme sa singularitetima i brzim poremedajima i promenema na ulazima adams dobar za nelinearne i glatke sisteme loš za sisteme sa vremenskim konstantama koje se menjaju u širokim granicama euler dobar samo za proveru rezultata generalno: izbegavati ga!
45 Primer (v4) opt = [1e-3, 1e-5, 10]; % tolerancija, min i max korak Tf = 20; x0 = [1; 1]; [tr23, xr23] = rk23( 'vdp', Tf, x0, opt ); plot( tr23, xr23 ) Van der Pol jednacina: X'' + ( X*X - 1 ) X' + X = 0 ili X1' = X1( 1 - X2*X2 ) - X2 X2' = X1 1 X2 1 - u * u (1-x2*x2) * - + X1' 1 s 1 s Scope X1
46 Poređenje metoda integracije (v4) tol=0.001 Metod Br. računanja izvoda Tačaka na izlazu Vremena računanja Greška (po tački) linsim ,37 0,0051 rk ,50 0,0023 rk ,0041 adams ,51 0,0019 gear ,91 0,0048 euler ,03 0,2881 referenca je rk45 sa tolerancijom od 1e-6 računato na PC486/33
47 Poređenje metoda integracije (v4) tol=0.1 Metod Br. računanja izvoda Tačaka na izlazu Vremena računanja Greška (po tački) linsim rk rk adams gear euler referenca je rk45 sa tolerancijom od 1e-6 računato na PC486/33
48 Vremenski diskretni modeli u Simulink-u sadrže diskretne blokove svaki blok ima ugrađene : odabirač na ulazu i produživač signala 0-tog reda na izlazu ulazi se osvežavaju (računaju) samo u trenucima odabiranja izlati imaju stalnu vrednost između dva trenutka odabiranja vreme odabiranja i ofset (opcija) su parametri bloka t = n T + ofset model može sadržati diskretne blokove sa različitim periodama odabirača modeli mogu biti sačinjeni isključivo od diskretnih blokova modeli mogu biti hibridni, sa pomešanim diskretnim i kontinualnim blokovima
49 Linearizacija modela funkcija linmod formira linearan vremenski kontinualan model na osnovu Simulink 'model'-a rez = linmod( model,x,u) gde su: ulazi i izlazi modela označeni ulaznim i izlaznim blokovima (iz biblioteke veza među blokovima) x i u nominalne vrednosti promenljivih stanja i ulaza - radna tačka oko koje se vrši linearizacija (mogu se izostaviti ako je radna tačka u 0) rez je dobijeni linearan model u nekoliko oblika: *A,B,C,D+ = linmod( model,x,u) [P, Q+ = linmod( model,x,u) struktura = linmod( model,x,u) kod vremenski diskretnih ili hibridnih modela upotrebljava se funkcija dlinmod, sa dodatnim parametrom - vremenom odabiranja Ts rez = dlinmod( model,ts,x,u)
50 Linearlizacija modela - primer» [a, b, c, d] = linmod( model2bloka') a = b = c = Inport + + Sum 1 s 2 +2s+1 Transfer Fcn1 1 2 Outport1 1 Outport d = 0 1 s+1 Transfer Fcn2
51 Linearlizacija modela primer 2 1 s+2.5 G6 1 In1.5 G1 10 s+2 G2 1.7 G3 2 s 2+s+2 G4 1 Out1 s+1 s 2+2s+7 G5 -K- G7» [a,b,c,d]=linmod('zad7blok');» tf(ss(a,b,c,d)) Transfer function: 17 s^ s^ s s^ s^ s^ s^ s^ s
52 Određivanje stacionarnih tačaka (trim) Za zadate vrednosti ulaza (i promenljivih stanja) mogu se odrediti vrednosti izlaza u ustaljenom stanju, i obrnuto Za zadate vrednosti izlaza mogu se odrediti vrednosti ulaza, ili kombinacija... Primer Odrediti vrednosti ulaza i promenljivih stanja koje na izlazu modela daju y=[1;1]» x = [0 0 0]'; u = 0; % početno pogađanje promenljivih stanja i ulaza» y = [1;1]; % željene vrednosti izlaza» ix = []; iu = []; % dozvoljene su promene vrednosti prom. stanja i ulaza» iy = [1;2]; % izlazi modela koji su fiksirani: 1. i 2.» [x, u, y, dx] = trim('model2bloka', x, u, y, ix, iu, iy) x = u = e-016 y = dx = 1.0e-015 *
53 Primer - Amortizer Nelinearan model: mx ( t) cx ( t) F m 10, c 5, F k k ( x( t)) ( x) 80x 3 f ( t) x ( t) x 1 x 2 2 ( t) f ( t) ( t) m c m x 2 80 ( t) m x 3 1 ( t)» *t,x,y+=sim( AmortizerNelin',20,*+,*0 10; );» plot(t,y) 0.8 Odziv x(t) na pobudu 10h(t)
54 Primer Amortizer stacionarno stanje Stacionarno stanje: mx ( t) cx ( t) 80x 3 ( t) f ( t) 80x 3 f» Upoc = 10; Xpoc = [1;1]; Ypoc = [1];» [Xnom, Unom, Ynom] = trim( AmortizerNelin', Xpoc, Upoc, Ypoc, [], 1, []) Xnom = Unom = 10 Ynom =
55 Primer Amortizer - linearizacija» *a,b,c,d+ = linmod( AmortizerNelin, Xnom, Unom) a = b = c = 1 0 d = 0» w = tf(ss(a,b,c,d)) Transfer function: s^ s + 6 Linearizacija modela mx ˆ( t) cxˆ( t) 80x 3 80x xˆ( t) 3 80x f, f 10 x mx ˆ( t) cxˆ( t) 240x xˆ( t) fˆ( t) 10 xˆ( t) 5xˆ( t) 60xˆ( t) fˆ( t) 3 2 f fˆ( t)
56 Primer Amortizer - poređenje Poređenje odziva linearnog i nelinearnog modela:» [y, t, x] = step(w, 25); % odziv na jediničnu pobudu» UT = [0 Unom+1; 25 Unom+1]; % pobuda je ustaljeno stanje + 1 (jed.pobuda)» [tn, xn, yn+ = sim( AmortizerNelin, 25, simset('initialstate',xnom), UT);» plot(t, y+ynom, tn, yn)
57 Kako SIMULINK funkcioniše 1. svi parametri blokova se izračunavaju u MATLAB-u i zamenjuju brojnim vrednostima 2. blokovi se sortiraju prema redosledu računanja (hijerarhija podsistema se ovde ignoriše) 3. proveravaju se dimenzije veza među blokovima (broj izlaza predhodnog se mora slagati sa brojem ulaza narednog bloka) 4. prva faza simulacije: računaju se izlazi svih blokova na osnovu (početnih) stanja 5. druga faza simulacije: iterativno se računaju izvodi na osnovu tekudeg vremena, ulaza i stanja. Izračunati izvodi se prosleđuju algoritmu za integraciju 6. osvežava se ekranski prikaz.
Projektovanje paralelnih algoritama II
 Projektovanje paralelnih algoritama II Primeri paralelnih algoritama, I deo Paralelni algoritmi za množenje matrica 1 Algoritmi za množenje matrica Ovde su data tri paralelna algoritma: Direktan algoritam
Projektovanje paralelnih algoritama II Primeri paralelnih algoritama, I deo Paralelni algoritmi za množenje matrica 1 Algoritmi za množenje matrica Ovde su data tri paralelna algoritma: Direktan algoritam
Mathcad sa algoritmima
 P R I M J E R I P R I M J E R I Mathcad sa algoritmima NAREDBE - elementarne obrade - sekvence Primjer 1 Napraviti algoritam za sabiranje dva broja. NAREDBE - elementarne obrade - sekvence Primjer 1 POČETAK
P R I M J E R I P R I M J E R I Mathcad sa algoritmima NAREDBE - elementarne obrade - sekvence Primjer 1 Napraviti algoritam za sabiranje dva broja. NAREDBE - elementarne obrade - sekvence Primjer 1 POČETAK
KLASIFIKACIJA NAIVNI BAJES. NIKOLA MILIKIĆ URL:
 KLASIFIKACIJA NAIVNI BAJES NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info ŠTA JE KLASIFIKACIJA? Zadatak određivanja klase kojoj neka instanca pripada instanca je opisana
KLASIFIKACIJA NAIVNI BAJES NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info ŠTA JE KLASIFIKACIJA? Zadatak određivanja klase kojoj neka instanca pripada instanca je opisana
Algoritam za množenje ulančanih matrica. Alen Kosanović Prirodoslovno-matematički fakultet Matematički odsjek
 Algoritam za množenje ulančanih matrica Alen Kosanović Prirodoslovno-matematički fakultet Matematički odsjek O problemu (1) Neka je A 1, A 2,, A n niz ulančanih matrica duljine n N, gdje su dimenzije matrice
Algoritam za množenje ulančanih matrica Alen Kosanović Prirodoslovno-matematički fakultet Matematički odsjek O problemu (1) Neka je A 1, A 2,, A n niz ulančanih matrica duljine n N, gdje su dimenzije matrice
Red veze za benzen. Slika 1.
 Red veze za benzen Benzen C 6 H 6 je aromatično ciklično jedinjenje. Njegove dve rezonantne forme (ili Kekuléove structure), prema teoriji valentne veze (VB) prikazuju se uobičajeno kao na slici 1 a),
Red veze za benzen Benzen C 6 H 6 je aromatično ciklično jedinjenje. Njegove dve rezonantne forme (ili Kekuléove structure), prema teoriji valentne veze (VB) prikazuju se uobičajeno kao na slici 1 a),
FTN Novi Sad Katedra za motore i vozila. Drumska vozila Uputstvo za izradu vučnog proračuna motornog vozila. 1. Ulazni podaci IZVOR:
 1. Ulazni podaci IZVOR: WWW.CARTODAY.COM 1. Ulazni podaci Masa / težina vozila Osovinske reakcije Raspodela težine napred / nazad Dimenzije pneumatika Čeona površina Koeficijent otpora vazduha Brzinska
1. Ulazni podaci IZVOR: WWW.CARTODAY.COM 1. Ulazni podaci Masa / težina vozila Osovinske reakcije Raspodela težine napred / nazad Dimenzije pneumatika Čeona površina Koeficijent otpora vazduha Brzinska
NEURONSKE MREŽE 1. predavanje
 NEURONSKE MREŽE 1. predavanje dr Zoran Ševarac sevarac@gmail.com FON, 2014. CILJ PREDAVANJA I VEŽBI IZ NEURONSKIH MREŽA Upoznavanje sa tehnologijom - osnovni pojmovi i modeli NM Mogućnosti i primena NM
NEURONSKE MREŽE 1. predavanje dr Zoran Ševarac sevarac@gmail.com FON, 2014. CILJ PREDAVANJA I VEŽBI IZ NEURONSKIH MREŽA Upoznavanje sa tehnologijom - osnovni pojmovi i modeli NM Mogućnosti i primena NM
DYNAMIC HEAT TRANSFER IN WALLS: LIMITATIONS OF HEAT FLUX METERS
 DYNAMI EAT TRANFER IN WALL: LIMITATION OF EAT FLUX METER DINAMIČKI PRENO TOPLOTE U ZIDOVIMA: OGRANIČENJA MERAČA TOPLOTNOG PROTOKA (TOPLOTNOG FLUKA) 1 I. Naveros a, b,. Ghiaus a a ETIL UMR58, INA-Lyon,
DYNAMI EAT TRANFER IN WALL: LIMITATION OF EAT FLUX METER DINAMIČKI PRENO TOPLOTE U ZIDOVIMA: OGRANIČENJA MERAČA TOPLOTNOG PROTOKA (TOPLOTNOG FLUKA) 1 I. Naveros a, b,. Ghiaus a a ETIL UMR58, INA-Lyon,
ANALYSIS OF INFLUENCE OF PARAMETERS ON TRANSFER FUNCTIONS OF APERIODIC MECHANISMS UDC Života Živković, Miloš Milošević, Ivan Ivanov
 UNIVERSITY OF NIŠ The scientific journal FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 6, 1999 pp. 675-681 Editor of series: Nenad Radojković, e-mail: radojkovic@ni.ac.yu Address: Univerzitetski
UNIVERSITY OF NIŠ The scientific journal FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 6, 1999 pp. 675-681 Editor of series: Nenad Radojković, e-mail: radojkovic@ni.ac.yu Address: Univerzitetski
Uvod u relacione baze podataka
 Uvod u relacione baze podataka Ana Spasić 2. čas 1 Mala studentska baza dosije (indeks, ime, prezime, datum rodjenja, mesto rodjenja, datum upisa) predmet (id predmeta, sifra, naziv, bodovi) ispitni rok
Uvod u relacione baze podataka Ana Spasić 2. čas 1 Mala studentska baza dosije (indeks, ime, prezime, datum rodjenja, mesto rodjenja, datum upisa) predmet (id predmeta, sifra, naziv, bodovi) ispitni rok
Index. 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202
 Index 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202 Absolute value block And zero-crossing detection, 11 In Clock model, 22 In Math Operations library, 23 Zero-crossing, turning
Index 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202 Absolute value block And zero-crossing detection, 11 In Clock model, 22 In Math Operations library, 23 Zero-crossing, turning
Šta je to mašinsko učenje?
 MAŠINSKO UČENJE Šta je to mašinsko učenje? Disciplina koja omogućava računarima da uče bez eksplicitnog programiranja (Arthur Samuel 1959). 1. Generalizacija znanja na osnovu prethodnog iskustva (podataka
MAŠINSKO UČENJE Šta je to mašinsko učenje? Disciplina koja omogućava računarima da uče bez eksplicitnog programiranja (Arthur Samuel 1959). 1. Generalizacija znanja na osnovu prethodnog iskustva (podataka
TEORIJA SKUPOVA Zadaci
 TEORIJA SKUPOVA Zadai LOGIKA 1 I. godina 1. Zapišite simbolima: ( x nije element skupa S (b) d je član skupa S () F je podskup slupa S (d) Skup S sadrži skup R 2. Neka je S { x;2x 6} = = i neka je b =
TEORIJA SKUPOVA Zadai LOGIKA 1 I. godina 1. Zapišite simbolima: ( x nije element skupa S (b) d je član skupa S () F je podskup slupa S (d) Skup S sadrži skup R 2. Neka je S { x;2x 6} = = i neka je b =
5 th INTERNATIONAL CONFERENCE Contemporary achievements in civil engineering 21. April Subotica, SERBIA
 5 th INTERNATIONAL CONFERENCE Contemporary achievements in civil engineering 21. April 2017. Subotica, SERBIA COMPUTER SIMULATION OF THE ORDER FREQUENCIES AMPLITUDES EXCITATION ON RESPONSE DYNAMIC 1D MODELS
5 th INTERNATIONAL CONFERENCE Contemporary achievements in civil engineering 21. April 2017. Subotica, SERBIA COMPUTER SIMULATION OF THE ORDER FREQUENCIES AMPLITUDES EXCITATION ON RESPONSE DYNAMIC 1D MODELS
MATHEMATICAL ANALYSIS OF PERFORMANCE OF A VIBRATORY BOWL FEEDER FOR FEEDING BOTTLE CAPS
 http://doi.org/10.24867/jpe-2018-02-055 JPE (2018) Vol.21 (2) Choudhary, M., Narang, R., Khanna, P. Original Scientific Paper MATHEMATICAL ANALYSIS OF PERFORMANCE OF A VIBRATORY BOWL FEEDER FOR FEEDING
http://doi.org/10.24867/jpe-2018-02-055 JPE (2018) Vol.21 (2) Choudhary, M., Narang, R., Khanna, P. Original Scientific Paper MATHEMATICAL ANALYSIS OF PERFORMANCE OF A VIBRATORY BOWL FEEDER FOR FEEDING
System Simulation using Matlab
 EE4314 Fall 2008 System Simulation using Matlab The purpose of this laboratory work is to provide experience with the Matlab software for system simulation. The laboratory work contains a guide for solving
EE4314 Fall 2008 System Simulation using Matlab The purpose of this laboratory work is to provide experience with the Matlab software for system simulation. The laboratory work contains a guide for solving
Summary Modeling of nonlinear reactive electronic circuits using artificial neural networks
 Summary Modeling of nonlinear reactive electronic circuits using artificial neural networks The problem of modeling of electronic components and circuits has been interesting since the first component
Summary Modeling of nonlinear reactive electronic circuits using artificial neural networks The problem of modeling of electronic components and circuits has been interesting since the first component
Metode praćenja planova
 Metode praćenja planova Klasična metoda praćenja Suvremene metode praćenja gantogram mrežni dijagram Metoda vrednovanja funkcionalnosti sustava Gantogram VREMENSKO TRAJANJE AKTIVNOSTI A K T I V N O S T
Metode praćenja planova Klasična metoda praćenja Suvremene metode praćenja gantogram mrežni dijagram Metoda vrednovanja funkcionalnosti sustava Gantogram VREMENSKO TRAJANJE AKTIVNOSTI A K T I V N O S T
Simulink Tutorial 1 CPE562
 Simulink Tutorial 1 CPE562 Week 1 Introduction to Simulink Familiarization with Simulink blocks Sources: Constants Sinks: Display Operations: Sum, Product, Add, Divide. Mathematical operations involving
Simulink Tutorial 1 CPE562 Week 1 Introduction to Simulink Familiarization with Simulink blocks Sources: Constants Sinks: Display Operations: Sum, Product, Add, Divide. Mathematical operations involving
AIR CURTAINS VAZDU[NE ZAVESE V H
 AIR CURTAINS V 15.000 H 21.000 KLIMA Co. 2 KLIMA Co. Flow and system stress should be known factors in air flow. The flow is gas quantity flowing through the system during given time unit and is measured
AIR CURTAINS V 15.000 H 21.000 KLIMA Co. 2 KLIMA Co. Flow and system stress should be known factors in air flow. The flow is gas quantity flowing through the system during given time unit and is measured
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Dynamic Systems. Simulation of. with MATLAB and Simulink. Harold Klee. Randal Allen SECOND EDITION. CRC Press. Taylor & Francis Group
 SECOND EDITION Simulation of Dynamic Systems with MATLAB and Simulink Harold Klee Randal Allen CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis
SECOND EDITION Simulation of Dynamic Systems with MATLAB and Simulink Harold Klee Randal Allen CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis
Regulisani elektromotorni pogoni sa asinhronim mašinama Direktna kontrola momenta
 Regulisani elektromotorni pogoni sa asinhronim mašinama Direktna kontrola momenta Istorijski pregled Opis metode Način realizacije Podešavanje parametara regulatora brine Pregled karakteristika Prevazilaženje
Regulisani elektromotorni pogoni sa asinhronim mašinama Direktna kontrola momenta Istorijski pregled Opis metode Način realizacije Podešavanje parametara regulatora brine Pregled karakteristika Prevazilaženje
APPROPRIATENESS OF GENETIC ALGORITHM USE FOR DISASSEMBLY SEQUENCE OPTIMIZATION
 JPE (2015) Vol.18 (2) Šebo, J. Original Scientific Paper APPROPRIATENESS OF GENETIC ALGORITHM USE FOR DISASSEMBLY SEQUENCE OPTIMIZATION Received: 17 July 2015 / Accepted: 25 Septembre 2015 Abstract: One
JPE (2015) Vol.18 (2) Šebo, J. Original Scientific Paper APPROPRIATENESS OF GENETIC ALGORITHM USE FOR DISASSEMBLY SEQUENCE OPTIMIZATION Received: 17 July 2015 / Accepted: 25 Septembre 2015 Abstract: One
U X. 1. Multivarijantna statistička analiza 1
 . Multivarijantna statistička analiza Standardizovana (normalizovana) vrednost obeležja Normalizovano odstupanje je mera varijacije koja pokazuje algebarsko odstupanje jedne vrednosti obeležja od aritmetičke
. Multivarijantna statistička analiza Standardizovana (normalizovana) vrednost obeležja Normalizovano odstupanje je mera varijacije koja pokazuje algebarsko odstupanje jedne vrednosti obeležja od aritmetičke
ANALYTICAL AND NUMERICAL PREDICTION OF SPRINGBACK IN SHEET METAL BENDING
 ANALYTICAL AND NUMERICAL PREDICTION OF SPRINGBACK IN SHEET METAL BENDING Slota Ján, Jurčišin Miroslav Department of Technologies and Materials, Faculty of Mechanical Engineering, Technical University of
ANALYTICAL AND NUMERICAL PREDICTION OF SPRINGBACK IN SHEET METAL BENDING Slota Ján, Jurčišin Miroslav Department of Technologies and Materials, Faculty of Mechanical Engineering, Technical University of
THE USE OF SCRIPT IN THE SOFTWARE GEMCOM ***
 MINING AND METALLURGY INSTITUTE BOR UDK: 622 ISSN: 2334-8836 (Štampano izdanje) ISSN: 2406-1395 (Online) UDK: 681.51:551:517.1(045)=111 doi:10.5937/mmeb1504053v Abstract Zoran Vaduvesković *, Daniel Kržanović
MINING AND METALLURGY INSTITUTE BOR UDK: 622 ISSN: 2334-8836 (Štampano izdanje) ISSN: 2406-1395 (Online) UDK: 681.51:551:517.1(045)=111 doi:10.5937/mmeb1504053v Abstract Zoran Vaduvesković *, Daniel Kržanović
Rešenja zadataka za vežbu na relacionoj algebri i relacionom računu
 Rešenja zadataka za vežbu na relacionoj algebri i relacionom računu 1. Izdvojiti ime i prezime studenata koji su rođeni u Beogradu. (DOSIJE WHERE MESTO_RODJENJA='Beograd')[IME, PREZIME] where mesto_rodjenja='beograd'
Rešenja zadataka za vežbu na relacionoj algebri i relacionom računu 1. Izdvojiti ime i prezime studenata koji su rođeni u Beogradu. (DOSIJE WHERE MESTO_RODJENJA='Beograd')[IME, PREZIME] where mesto_rodjenja='beograd'
Ivan Soldo. Sažetak. U članku se analiziraju različiti načini množenja matrica. Svaki od njih ilustriran je primjerom.
 Osječki matematički list 5(005), 8 Različiti načini množenja matrica Ivan Soldo Sažetak U članku se analiziraju različiti načini množenja matrica Svaki od njih ilustriran je primjerom Ključne riječi: linearni
Osječki matematički list 5(005), 8 Različiti načini množenja matrica Ivan Soldo Sažetak U članku se analiziraju različiti načini množenja matrica Svaki od njih ilustriran je primjerom Ključne riječi: linearni
INVESTIGATION OF UPSETTING OF CYLINDER BY CONICAL DIES
 INVESTIGATION OF UPSETTING OF CYLINDER BY CONICAL DIES D. Vilotic 1, M. Plancak M 1, A. Bramley 2 and F. Osman 2 1 University of Novi Sad, Yugoslavia; 2 University of Bath, England ABSTRACT Process of
INVESTIGATION OF UPSETTING OF CYLINDER BY CONICAL DIES D. Vilotic 1, M. Plancak M 1, A. Bramley 2 and F. Osman 2 1 University of Novi Sad, Yugoslavia; 2 University of Bath, England ABSTRACT Process of
TemidaLib sistem za rad sa velikim brojevima TemidaLib Multiprecision Arithmetic Library
 TemidaLib sistem za rad sa velikim brojevima TemidaLib Multiprecision Arithmetic Library Jelena Tomašević i Milena Vujošević-Janičić Matematički fakultet, Univerzitet u Beogradu Studentski trg 16, 11000
TemidaLib sistem za rad sa velikim brojevima TemidaLib Multiprecision Arithmetic Library Jelena Tomašević i Milena Vujošević-Janičić Matematički fakultet, Univerzitet u Beogradu Studentski trg 16, 11000
= 0 otherwise. Eu(n) = 0 and Eu(n)u(m) = δ n m
 = 0 and Eu(n)u(m) = δ n m") A-AE 567 Final Homework Spring 212 You will need Matlab and Simulink. You work must be neat and easy to read. Clearly, identify your answers in a box. You will loose points for poorly written work. You
A-AE 567 Final Homework Spring 212 You will need Matlab and Simulink. You work must be neat and easy to read. Clearly, identify your answers in a box. You will loose points for poorly written work. You
Simulink Modeling Tutorial
 Simulink Modeling Tutorial Train system Free body diagram and Newton's law Model Construction Running the Model Obtaining MATLAB Model In Simulink, it is very straightforward to represent a physical system
Simulink Modeling Tutorial Train system Free body diagram and Newton's law Model Construction Running the Model Obtaining MATLAB Model In Simulink, it is very straightforward to represent a physical system
6 th INTERNATIONAL CONFERENCE
 6 th INTERNATIONAL CONFERENCE Contemporary achievements in civil engineering 20. April 2018. Subotica, SERBIA ABSOLUTE MOVEMENTS OF LARGE DAMS ANALYSIS BY REGRESSION METHOD UTILIZATION Žarko Nestorović
6 th INTERNATIONAL CONFERENCE Contemporary achievements in civil engineering 20. April 2018. Subotica, SERBIA ABSOLUTE MOVEMENTS OF LARGE DAMS ANALYSIS BY REGRESSION METHOD UTILIZATION Žarko Nestorović
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
Digital Control of Electric Drives
 Digital Control of Electric Drives Logic Circuits - equential Description Form, Finite tate Machine (FM) Czech Technical University in Prague Faculty of Electrical Engineering Ver.. J. Zdenek 27 Logic
Digital Control of Electric Drives Logic Circuits - equential Description Form, Finite tate Machine (FM) Czech Technical University in Prague Faculty of Electrical Engineering Ver.. J. Zdenek 27 Logic
FPGA Resource Utilization Estimates for NI crio LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008
 FPGA Resource Utilization Estimates for NI crio-9104 LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008 Note: The numbers presented in this document are estimates. Actual resource usage for your
FPGA Resource Utilization Estimates for NI crio-9104 LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008 Note: The numbers presented in this document are estimates. Actual resource usage for your
CONTROL SYSTEMS LABORATORY ECE311 LAB 1: The Magnetic Ball Suspension System: Modelling and Simulation Using Matlab
 CONTROL SYSTEMS LABORATORY ECE311 LAB 1: The Magnetic Ball Suspension System: Modelling and Simulation Using Matlab 1 Introduction and Purpose The purpose of this experiment is to familiarize you with
CONTROL SYSTEMS LABORATORY ECE311 LAB 1: The Magnetic Ball Suspension System: Modelling and Simulation Using Matlab 1 Introduction and Purpose The purpose of this experiment is to familiarize you with
MODELING AND SIMULATION OF THE SELF - EXCITED STICK-SLIP SYSTEM USING BONDSIM TOOLS UDC :
 FACTA UNIVERSITATIS Series: Mechanical Engineering Vol. 2, N o, 2004, pp. 49-58 MODELING AND SIMULATION OF THE SELF - EXCITED STICK-SLIP SYSTEM USING BONDSIM TOOLS UDC 68.5.07:59.876.2 Vlastimir Nikolić,
FACTA UNIVERSITATIS Series: Mechanical Engineering Vol. 2, N o, 2004, pp. 49-58 MODELING AND SIMULATION OF THE SELF - EXCITED STICK-SLIP SYSTEM USING BONDSIM TOOLS UDC 68.5.07:59.876.2 Vlastimir Nikolić,
PRIPADNOST RJEŠENJA KVADRATNE JEDNAČINE DANOM INTERVALU
 MAT KOL Banja Luka) ISSN 0354 6969 p) ISSN 1986 58 o) Vol. XXI )015) 105 115 http://www.imvibl.org/dmbl/dmbl.htm PRIPADNOST RJEŠENJA KVADRATNE JEDNAČINE DANOM INTERVALU Bernadin Ibrahimpašić 1 Senka Ibrahimpašić
MAT KOL Banja Luka) ISSN 0354 6969 p) ISSN 1986 58 o) Vol. XXI )015) 105 115 http://www.imvibl.org/dmbl/dmbl.htm PRIPADNOST RJEŠENJA KVADRATNE JEDNAČINE DANOM INTERVALU Bernadin Ibrahimpašić 1 Senka Ibrahimpašić
Lecture 2. Today s Goal. Linearization Around a Trajectory, cont. Linearization Around a Trajectory. Linearization, cont d.
 Lecture Today s Goal Linearization Stability definitions Simulation in Matlab/Simulink To be able to linearize, bot around euilibria and trajectories eplain definitions of stability ceck local stability
Lecture Today s Goal Linearization Stability definitions Simulation in Matlab/Simulink To be able to linearize, bot around euilibria and trajectories eplain definitions of stability ceck local stability
Combinatorial Logic Design Multiplexers and ALUs CS 64: Computer Organization and Design Logic Lecture #13
 Combinatorial Logic Design Multiplexers and ALUs CS 64: Computer Organization and Design Logic Lecture #13 Ziad Matni Dept. of Computer Science, UCSB Administrative Re: Midterm Exam #2 Graded! 5/22/18
Combinatorial Logic Design Multiplexers and ALUs CS 64: Computer Organization and Design Logic Lecture #13 Ziad Matni Dept. of Computer Science, UCSB Administrative Re: Midterm Exam #2 Graded! 5/22/18
povezuju tačke na četiri različita načina (pravom linijom, splajnom,
 Origin Zadatak 1. Otvoriti Origin i kreirati novi projekat; U datasheet-u dodati novu kolonu; U project exploreru kreirati nove podfoldere: Data i Graphs; Prebaciti trenutni datasheet u podfolder Data;
Origin Zadatak 1. Otvoriti Origin i kreirati novi projekat; U datasheet-u dodati novu kolonu; U project exploreru kreirati nove podfoldere: Data i Graphs; Prebaciti trenutni datasheet u podfolder Data;
Zbirka ispitnih zadataka iz Baza Podataka 1 Ispiti i kolokvijumi u periodu
 Beogradski univerzitet Elektrotehnički fakultet Miloš Cvetanović Zbirka ispitnih zadataka iz Baza Podataka 1 Ispiti i kolokvijumi u periodu 2007-2011 Beograd, Januar 2012 Ispiti... 3 Januarski ispitni
Beogradski univerzitet Elektrotehnički fakultet Miloš Cvetanović Zbirka ispitnih zadataka iz Baza Podataka 1 Ispiti i kolokvijumi u periodu 2007-2011 Beograd, Januar 2012 Ispiti... 3 Januarski ispitni
Nonlinear Statistical Methodology Applied on Modeling the Growth Correlation of Some Global Macroeconomic Parameters
 Nonlinear Statistical Methodology Applied on Modeling the Growth Correlation of Some Global Macroeconomic Parameters Nonlinear Statistical Methodology Applied on Modeling the Growth Correlation of Some
Nonlinear Statistical Methodology Applied on Modeling the Growth Correlation of Some Global Macroeconomic Parameters Nonlinear Statistical Methodology Applied on Modeling the Growth Correlation of Some
Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013
 Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
x(n + 1) = Ax(n) and y(n) = Cx(n) + 2v(n) and C = x(0) = ξ 1 ξ 2 Ex(0)x(0) = I
 = Ax(n) and y(n) = Cx(n) + 2v(n) and C = x(0) = ξ 1 ξ 2 Ex(0)x(0) = I") A-AE 567 Final Homework Spring 213 You will need Matlab and Simulink. You work must be neat and easy to read. Clearly, identify your answers in a box. You will loose points for poorly written work. You
A-AE 567 Final Homework Spring 213 You will need Matlab and Simulink. You work must be neat and easy to read. Clearly, identify your answers in a box. You will loose points for poorly written work. You
Predmet:Nove fizičkohemijske metode Tema: Metode ispitivanja dinamike složenih reakcionih sistema
 Predmet:Nove fizičkohemijske metode Tema: Metode ispitivanja dinamike složenih reakcionih sistema Predavači: Ljiljana Kolar-Anić i Željko Čupić Sadržaj I čas 1. Složeni reakcioni sistemi 2. Dinamičke strukture
Predmet:Nove fizičkohemijske metode Tema: Metode ispitivanja dinamike složenih reakcionih sistema Predavači: Ljiljana Kolar-Anić i Željko Čupić Sadržaj I čas 1. Složeni reakcioni sistemi 2. Dinamičke strukture
FPGA Resource Utilization Estimates for NI PXI-7854R. LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008
 FPGA Resource Utilization Estimates for NI PXI-7854R LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008 Note: The numbers presented in this document are estimates. Actual resource usage for your
FPGA Resource Utilization Estimates for NI PXI-7854R LabVIEW FPGA Version: 8.6 NI-RIO Version: 3.0 Date: 8/5/2008 Note: The numbers presented in this document are estimates. Actual resource usage for your
VELOCITY PROFILES AT THE OUTLET OF THE DIFFERENT DESIGNED DIES FOR ALUMINIUM EXTRUSION
 VELOCITY PROFILES AT THE OUTLET OF THE DIFFERENT DESIGNED DIES FOR ALUMINIUM EXTRUSION J.Caloska, J. Lazarev, Faculty of Mechanical Engineering, University Cyril and Methodius, Skopje, Republic of Macedonia
VELOCITY PROFILES AT THE OUTLET OF THE DIFFERENT DESIGNED DIES FOR ALUMINIUM EXTRUSION J.Caloska, J. Lazarev, Faculty of Mechanical Engineering, University Cyril and Methodius, Skopje, Republic of Macedonia
MAGNETIC FIELD OF ELECTRICAL RADIANT HEATING SYSTEM
 UDK 537.612:697.27 DOI: 10.7562/SE2017.7.02.03 Original article www.safety.ni.ac.rs MIODRAG MILUTINOV 1 ANAMARIJA JUHAS 2 NEDA PEKARIĆ-NAĐ 3 1,2,3 University of Novi Sad, Faculty of Technical Sciences,
UDK 537.612:697.27 DOI: 10.7562/SE2017.7.02.03 Original article www.safety.ni.ac.rs MIODRAG MILUTINOV 1 ANAMARIJA JUHAS 2 NEDA PEKARIĆ-NAĐ 3 1,2,3 University of Novi Sad, Faculty of Technical Sciences,
Kontrolni uređaji s vremenskom odgodom za rasvjetu i klimu
 KOTROI SKOPOVI ZA RASVJETU I KIMA UREĐAJE Kontrolni i s vremenskom odgodom za rasvjetu i klimu Modularni dizajn, slobodna izmjena konfiguracije Sigurno. iski napon V Efikasno čuvanje energije Sigurnost.
KOTROI SKOPOVI ZA RASVJETU I KIMA UREĐAJE Kontrolni i s vremenskom odgodom za rasvjetu i klimu Modularni dizajn, slobodna izmjena konfiguracije Sigurno. iski napon V Efikasno čuvanje energije Sigurnost.
Vidyalankar S.E. Sem. III [CMPN] Digital Logic Design and Analysis Prelim Question Paper Solution
![Vidyalankar S.E. Sem. III [CMPN] Digital Logic Design and Analysis Prelim Question Paper Solution](/thumbs/90/103673562.jpg "Vidyalankar S.E. Sem. III [CMPN] Digital Logic Design and Analysis Prelim Question Paper Solution") . (a) (i) ( B C 5) H (A 2 B D) H S.E. Sem. III [CMPN] Digital Logic Design and Analysis Prelim Question Paper Solution ( B C 5) H (A 2 B D) H = (FFFF 698) H (ii) (2.3) 4 + (22.3) 4 2 2. 3 2. 3 2 3. 2 (2.3)
. (a) (i) ( B C 5) H (A 2 B D) H S.E. Sem. III [CMPN] Digital Logic Design and Analysis Prelim Question Paper Solution ( B C 5) H (A 2 B D) H = (FFFF 698) H (ii) (2.3) 4 + (22.3) 4 2 2. 3 2. 3 2 3. 2 (2.3)
Analysis and Application of FLL based on the Processing of the Input and Output Periods
 Online ISSN 1848-3380, Print ISSN 0005-1144 ATKAFF 57(1), 230 238(2016) Djurdje Perišić, Aleksandar Žorić, Marko Perišić, Dragan Mitić Analysis and Application of FLL based on the Processing of the Input
Online ISSN 1848-3380, Print ISSN 0005-1144 ATKAFF 57(1), 230 238(2016) Djurdje Perišić, Aleksandar Žorić, Marko Perišić, Dragan Mitić Analysis and Application of FLL based on the Processing of the Input
PRECIPITATION FORECAST USING STATISTICAL APPROACHES UDC 55:311.3
 FACTA UNIVERSITATIS Series: Working and Living Environmental Protection Vol. 10, N o 1, 2013, pp. 79-91 PRECIPITATION FORECAST USING STATISTICAL APPROACHES UDC 55:311.3 Mladjen Ćurić 1, Stanimir Ţivanović
FACTA UNIVERSITATIS Series: Working and Living Environmental Protection Vol. 10, N o 1, 2013, pp. 79-91 PRECIPITATION FORECAST USING STATISTICAL APPROACHES UDC 55:311.3 Mladjen Ćurić 1, Stanimir Ţivanović
LINEARNI MODELI STATISTIČKI PRAKTIKUM 2 2. VJEŽBE
 LINEARNI MODELI STATISTIČKI PRAKTIKUM 2 2. VJEŽBE Linearni model Promatramo jednodimenzionalni linearni model. Y = β 0 + p β k x k + ε k=1 x 1, x 2,..., x p - varijable poticaja (kontrolirane) ε - sl.
LINEARNI MODELI STATISTIČKI PRAKTIKUM 2 2. VJEŽBE Linearni model Promatramo jednodimenzionalni linearni model. Y = β 0 + p β k x k + ε k=1 x 1, x 2,..., x p - varijable poticaja (kontrolirane) ε - sl.
Today s Goal. Lecture 2. Linearization Around a Trajectory, cont. Linearization Around a Trajectory. Linearization, cont d.
 Lecture Today s Goal To be able to linearize, bot around euilibria and trajectories eplain definitions of stability ceck local stability and local controllability at euilibria simulate in Simulink Material
Lecture Today s Goal To be able to linearize, bot around euilibria and trajectories eplain definitions of stability ceck local stability and local controllability at euilibria simulate in Simulink Material
SYNCHRONIZATION OF HYDROMOTOR SPEEDS IN THE SYSTEM OF WHEEL DRIVE UDC : Radan Durković
 FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 7, 2000, pp. 863-869 SYNCHRONIZATION OF HYDROMOTOR SPEEDS IN THE SYSTEM OF WHEEL DRIVE UDC 621.22:62-254 Radan Durković The Faculty of Mechanical
FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 7, 2000, pp. 863-869 SYNCHRONIZATION OF HYDROMOTOR SPEEDS IN THE SYSTEM OF WHEEL DRIVE UDC 621.22:62-254 Radan Durković The Faculty of Mechanical
Šime Šuljić. Funkcije. Zadavanje funkcije i područje definicije. š2004š 1
 Šime Šuljić Funkcije Zadavanje funkcije i područje definicije š2004š 1 Iz povijesti Dvojica Francuza, Pierre de Fermat i Rene Descartes, posebno su zadužila matematiku unijevši ideju koordinatne metode
Šime Šuljić Funkcije Zadavanje funkcije i područje definicije š2004š 1 Iz povijesti Dvojica Francuza, Pierre de Fermat i Rene Descartes, posebno su zadužila matematiku unijevši ideju koordinatne metode
Linear Parameter Varying and Time-Varying Model Predictive Control
 Linear Parameter Varying and Time-Varying Model Predictive Control Alberto Bemporad - Model Predictive Control course - Academic year 016/17 0-1 Linear Parameter-Varying (LPV) MPC LTI prediction model
Linear Parameter Varying and Time-Varying Model Predictive Control Alberto Bemporad - Model Predictive Control course - Academic year 016/17 0-1 Linear Parameter-Varying (LPV) MPC LTI prediction model
REALIZACIJA SIMULATORA REAKTIVNE SNAGE ELEKTRANE TENT A RADI ISPITIVANJA GRUPNOG REGULATORA REAKTIVNE SNAGE
 Stručni rad UDK: 62.33.322 : 62.3.06.25 : 68.5.07 BIBLID:0350-8528(2008-2009),9.p. 57-68 REALIZACIJA SIMULATORA REAKTIVNE SNAGE ELEKTRANE TENT A RADI ISPITIVANJA GRUPNOG REGULATORA REAKTIVNE SNAGE Jasna
Stručni rad UDK: 62.33.322 : 62.3.06.25 : 68.5.07 BIBLID:0350-8528(2008-2009),9.p. 57-68 REALIZACIJA SIMULATORA REAKTIVNE SNAGE ELEKTRANE TENT A RADI ISPITIVANJA GRUPNOG REGULATORA REAKTIVNE SNAGE Jasna
Đorđe Đorđević, Dušan Petković, Darko Živković. University of Niš, The Faculty of Civil Engineering and Architecture, Serbia
 FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 6, N o 2, 2008, pp. 207-220 DOI:10.2298/FUACE0802207D THE APPLIANCE OF INTERVAL CALCULUS IN ESTIMATION OF PLATE DEFLECTION BY SOLVING
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 6, N o 2, 2008, pp. 207-220 DOI:10.2298/FUACE0802207D THE APPLIANCE OF INTERVAL CALCULUS IN ESTIMATION OF PLATE DEFLECTION BY SOLVING
Math Numerical Analysis Mid-Term Test Solutions
 Math 400 - Numerical Analysis Mid-Term Test Solutions. Short Answers (a) A sufficient and necessary condition for the bisection method to find a root of f(x) on the interval [a,b] is f(a)f(b) < 0 or f(a)
Math 400 - Numerical Analysis Mid-Term Test Solutions. Short Answers (a) A sufficient and necessary condition for the bisection method to find a root of f(x) on the interval [a,b] is f(a)f(b) < 0 or f(a)
DEVELOPMENT OF MATHEMATICAL MODELS TO PREDICT THE EFFECT OF INPUT PARAMETERS ON FEED RATE OF A RECIPROCATORY TUBE FUNNEL FEEDER
 http://doi.org/10.24867/jpe-2018-01-067 JPE (2018) Vol.21 (1) Jain, A., Bansal, P., Khanna, P. Preliminary Note DEVELOPMENT OF MATHEMATICAL MODELS TO PREDICT THE EFFECT OF INPUT PARAMETERS ON FEED RATE
http://doi.org/10.24867/jpe-2018-01-067 JPE (2018) Vol.21 (1) Jain, A., Bansal, P., Khanna, P. Preliminary Note DEVELOPMENT OF MATHEMATICAL MODELS TO PREDICT THE EFFECT OF INPUT PARAMETERS ON FEED RATE
DISTRIBUIRANI ALGORITMI I SISTEMI
 Postavka 7: međusobno isključivanje sa read/write promenljivama 1 DISTRIBUIRANI ALGORITMI I SISTEMI Iz kursa CSCE 668 Proleće 2014 Autor izvorne prezentacije: Prof. Jennifer Welch Read/Write deljene promenljive
Postavka 7: međusobno isključivanje sa read/write promenljivama 1 DISTRIBUIRANI ALGORITMI I SISTEMI Iz kursa CSCE 668 Proleće 2014 Autor izvorne prezentacije: Prof. Jennifer Welch Read/Write deljene promenljive
KOINTEGRACIJA (engl. Co-integration)
") KOINTEGRACIJA (engl. Co-integration) OSNOVNI METODOLOŠKI OKVIR ZA MODELIRANJE MAKROEKONOMSKIH VREMENSKIH SERIJA EKONOMSKE VREMENSKE SERIJE: NAJČEŠĆE POSEDUJU STOHASTIČKI TREND - NEPREDVIDIVO SE KREĆU TOKOM
KOINTEGRACIJA (engl. Co-integration) OSNOVNI METODOLOŠKI OKVIR ZA MODELIRANJE MAKROEKONOMSKIH VREMENSKIH SERIJA EKONOMSKE VREMENSKE SERIJE: NAJČEŠĆE POSEDUJU STOHASTIČKI TREND - NEPREDVIDIVO SE KREĆU TOKOM
Asian Journal of Science and Technology Vol. 4, Issue 08, pp , August, 2013 RESEARCH ARTICLE
 Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 4, Issue 08, pp.037-041, August, 2013 RESEARCH ARTICLE
Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 4, Issue 08, pp.037-041, August, 2013 RESEARCH ARTICLE
DOUBLE ARM JUGGLING SYSTEM Progress Presentation ECSE-4962 Control Systems Design
 DOUBLE ARM JUGGLING SYSTEM Progress Presentation ECSE-4962 Control Systems Design Group Members: John Kua Trinell Ball Linda Rivera Introduction Where are we? Bulk of Design and Build Complete Testing
DOUBLE ARM JUGGLING SYSTEM Progress Presentation ECSE-4962 Control Systems Design Group Members: John Kua Trinell Ball Linda Rivera Introduction Where are we? Bulk of Design and Build Complete Testing
Sample Test Paper - I
 Scheme G Sample Test Paper - I Course Name : Computer Engineering Group Marks : 25 Hours: 1 Hrs. Q.1) Attempt any THREE: 09 Marks a) Define i) Propagation delay ii) Fan-in iii) Fan-out b) Convert the following:
Scheme G Sample Test Paper - I Course Name : Computer Engineering Group Marks : 25 Hours: 1 Hrs. Q.1) Attempt any THREE: 09 Marks a) Define i) Propagation delay ii) Fan-in iii) Fan-out b) Convert the following:
Sequential Logic. Rab Nawaz Khan Jadoon DCS. Lecturer COMSATS Lahore Pakistan. Department of Computer Science
 Sequential Logic Rab Nawaz Khan Jadoon DCS COMSATS Institute of Information Technology Lecturer COMSATS Lahore Pakistan Digital Logic and Computer Design Sequential Logic Combinational circuits with memory
Sequential Logic Rab Nawaz Khan Jadoon DCS COMSATS Institute of Information Technology Lecturer COMSATS Lahore Pakistan Digital Logic and Computer Design Sequential Logic Combinational circuits with memory
Engineered System Design and Integration A semantic domain for modeling cyber-physical systems
 Engineered System Design and Integration A semantic domain for modeling cyber-physical systems Pieter J. Mosterman The importance of computation Together with theory and experimentation, computational
Engineered System Design and Integration A semantic domain for modeling cyber-physical systems Pieter J. Mosterman The importance of computation Together with theory and experimentation, computational
THE ROLE OF SINGULAR VALUES OF MEASURED FREQUENCY RESPONSE FUNCTION MATRIX IN MODAL DAMPING ESTIMATION (PART II: INVESTIGATIONS)
") Uloga singularnih vrijednosti izmjerene matrice funkcije frekventnog odziva u procjeni modalnog prigušenja (Dio II: Istraživanja) ISSN 33-365 (Print), ISSN 848-6339 (Online) DOI:.7559/TV-2492894527 THE
Uloga singularnih vrijednosti izmjerene matrice funkcije frekventnog odziva u procjeni modalnog prigušenja (Dio II: Istraživanja) ISSN 33-365 (Print), ISSN 848-6339 (Online) DOI:.7559/TV-2492894527 THE
3. Programiranje u Matlab-u
 3. Programiranje u Matlab-u 3.1 M-datoteke M-datoteka nije ništa drugo do obična tekstualna datoteka koja sadrži MATLAB komande i sačuvana je sa ekstenzijom.m. Postoje dva tipa M-datoteka, skriptovi i
3. Programiranje u Matlab-u 3.1 M-datoteke M-datoteka nije ništa drugo do obična tekstualna datoteka koja sadrži MATLAB komande i sačuvana je sa ekstenzijom.m. Postoje dva tipa M-datoteka, skriptovi i
SYSTEM IDENTIFICATION APPROACH APPLICATION FOR EVALUATION OF SYSTEM PROPERTIES DEGRADATION UDC : (045)=20
=20") FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 3, N o 1, 2004, pp. 9-22 SYSTEM IDENTIFICATION APPROACH APPLICATION FOR EVALUATION OF SYSTEM PROPERTIES DEGRADATION UDC 624.01:624.042.8(045)=20
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 3, N o 1, 2004, pp. 9-22 SYSTEM IDENTIFICATION APPROACH APPLICATION FOR EVALUATION OF SYSTEM PROPERTIES DEGRADATION UDC 624.01:624.042.8(045)=20
LOGIC CIRCUITS. Basic Experiment and Design of Electronics
 Basic Experiment and Design of Electronics LOGIC CIRCUITS Ho Kyung Kim, Ph.D. hokyung@pusan.ac.kr School of Mechanical Engineering Pusan National University Outline Combinational logic circuits Output
Basic Experiment and Design of Electronics LOGIC CIRCUITS Ho Kyung Kim, Ph.D. hokyung@pusan.ac.kr School of Mechanical Engineering Pusan National University Outline Combinational logic circuits Output
Miloš Brajović REKURZIVNO IZRAČUNAVANJE VREMENSKO-FREKVENCIJSKIH REPREZENTACIJA. magistarski rad
 UNIVERZITET CRNE GORE ELEKTROTEHNIČKI FAKULTET Miloš Brajović REKURZIVNO IZRAČUNAVANJE VREMENSKO-FREKVENCIJSKIH REPREZENTACIJA magistarski rad Podgorica, 23. UNIVERZITET CRNE GORE ELEKTROTEHNIČKI FAKULTET
UNIVERZITET CRNE GORE ELEKTROTEHNIČKI FAKULTET Miloš Brajović REKURZIVNO IZRAČUNAVANJE VREMENSKO-FREKVENCIJSKIH REPREZENTACIJA magistarski rad Podgorica, 23. UNIVERZITET CRNE GORE ELEKTROTEHNIČKI FAKULTET
Power System Control
 Power System Control Basic Control Engineering Prof. Wonhee Kim School of Energy Systems Engineering, Chung-Ang University 2 Contents Why feedback? System Modeling in Frequency Domain System Modeling in
Power System Control Basic Control Engineering Prof. Wonhee Kim School of Energy Systems Engineering, Chung-Ang University 2 Contents Why feedback? System Modeling in Frequency Domain System Modeling in
J. Sjöberg et al. (1995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 31, 12, str
:Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 31, 12, str") Dynamic Systems Identification Part - Nonlinear systems Reference: J. Sjöberg et al. (995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 3,, str. 69-74. Systems
Dynamic Systems Identification Part - Nonlinear systems Reference: J. Sjöberg et al. (995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 3,, str. 69-74. Systems
Unit 7 Sequential Circuits (Flip Flop, Registers)
") College of Computer and Information Sciences Department of Computer Science CSC 220: Computer Organization Unit 7 Sequential Circuits (Flip Flop, Registers) 2 SR Flip-Flop The SR flip-flop, also known
College of Computer and Information Sciences Department of Computer Science CSC 220: Computer Organization Unit 7 Sequential Circuits (Flip Flop, Registers) 2 SR Flip-Flop The SR flip-flop, also known
ON A JERK DYNAMICAL SYSTEM II UDC Sonja Gegovska-Zajkova 1, Ljubiša M. Kocic 2
 FACTA UNIVERSITATIS Series: Automatic Control and Robotics Vol. 10, N o 1, 2011, pp. 29-36 ON A JERK DYNAMICAL SYSTEM II UDC 681.5.01 517.93 Sonja Gegovska-Zajkova 1, Ljubiša M. Kocic 2 1 University Ss
FACTA UNIVERSITATIS Series: Automatic Control and Robotics Vol. 10, N o 1, 2011, pp. 29-36 ON A JERK DYNAMICAL SYSTEM II UDC 681.5.01 517.93 Sonja Gegovska-Zajkova 1, Ljubiša M. Kocic 2 1 University Ss
Simulacioni model direktne kontrole momenta sa diskretizovanim naponskim intenzitetima 1
 TECHNICS AND INFORMATICS IN EDUCATION 6 th International Conference, Faculty of Technical Sciences, Čačak, Serbia, 28 29th May 216 TEHNIKA I INFORMATIKA U OBRAZOVANJU 6. međunarodna konferencija, Fakultet
TECHNICS AND INFORMATICS IN EDUCATION 6 th International Conference, Faculty of Technical Sciences, Čačak, Serbia, 28 29th May 216 TEHNIKA I INFORMATIKA U OBRAZOVANJU 6. međunarodna konferencija, Fakultet
Slika 1. Slika 2. Da ne bismo stalno izbacivali elemente iz skupa, mi ćemo napraviti još jedan niz markirano, gde će
 Permutacije Zadatak. U vreći se nalazi n loptica različitih boja. Iz vreće izvlačimo redom jednu po jednu lopticu i stavljamo jednu pored druge. Koliko različitih redosleda boja možemo da dobijemo? Primer
Permutacije Zadatak. U vreći se nalazi n loptica različitih boja. Iz vreće izvlačimo redom jednu po jednu lopticu i stavljamo jednu pored druge. Koliko različitih redosleda boja možemo da dobijemo? Primer
Mathematical Modelling Using SimScape (Electrical Systems)
") Experiment Three Mathematical Modelling Using SimScape (Electrical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Model and simulate MultiDomain
Experiment Three Mathematical Modelling Using SimScape (Electrical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Model and simulate MultiDomain
Programiranje u realnom vremenu Bojan Furlan
 Programiranje u realnom vremenu Bojan Furlan Tri procesa sa D = T imaju sledeće karakteristike: Proces T C a 3 1 b 6 2 c 18 5 (a) Pokazati kako se može konstruisati ciklično izvršavanje ovih procesa. (b)
Programiranje u realnom vremenu Bojan Furlan Tri procesa sa D = T imaju sledeće karakteristike: Proces T C a 3 1 b 6 2 c 18 5 (a) Pokazati kako se može konstruisati ciklično izvršavanje ovih procesa. (b)
Numbering Systems. Computational Platforms. Scaling and Round-off Noise. Special Purpose. here that is dedicated architecture
 Computational Platforms Numbering Systems Basic Building Blocks Scaling and Round-off Noise Computational Platforms Viktor Öwall viktor.owall@eit.lth.seowall@eit lth Standard Processors or Special Purpose
Computational Platforms Numbering Systems Basic Building Blocks Scaling and Round-off Noise Computational Platforms Viktor Öwall viktor.owall@eit.lth.seowall@eit lth Standard Processors or Special Purpose
Sadržaj Preface...1 Computer-aided analysis of mathematical models (dr Arpad Takači) ...3
 ...3") Sadržaj Preface...1 Computer-aided analysis of mathematical models (dr Arpad Takači)...3 Modeliranje i simulacija...5 Modeliranje...5 Analitički i simulacioni modeli...6 Nivoi apstrakcije u modelu...7
Sadržaj Preface...1 Computer-aided analysis of mathematical models (dr Arpad Takači)...3 Modeliranje i simulacija...5 Modeliranje...5 Analitički i simulacioni modeli...6 Nivoi apstrakcije u modelu...7
Vidyalankar S.E. Sem. III [ETRX] Digital Circuits and Design Prelim Question Paper Solution
![Vidyalankar S.E. Sem. III [ETRX] Digital Circuits and Design Prelim Question Paper Solution](/thumbs/79/79145081.jpg "Vidyalankar S.E. Sem. III [ETRX] Digital Circuits and Design Prelim Question Paper Solution") S.E. Sem. III [ETRX] Digital Circuits and Design Prelim uestion Paper Solution. (a) Static Hazard Static hazards have two cases: static and static. static- hazard exists when the output variable should
S.E. Sem. III [ETRX] Digital Circuits and Design Prelim uestion Paper Solution. (a) Static Hazard Static hazards have two cases: static and static. static- hazard exists when the output variable should
Lab 6a: Pole Placement for the Inverted Pendulum
 Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Digital Logic: Boolean Algebra and Gates. Textbook Chapter 3
 Digital Logic: Boolean Algebra and Gates Textbook Chapter 3 Basic Logic Gates XOR CMPE12 Summer 2009 02-2 Truth Table The most basic representation of a logic function Lists the output for all possible
Digital Logic: Boolean Algebra and Gates Textbook Chapter 3 Basic Logic Gates XOR CMPE12 Summer 2009 02-2 Truth Table The most basic representation of a logic function Lists the output for all possible
Sequential Logic Circuits
 Chapter 4 Sequential Logic Circuits 4 1 The defining characteristic of a combinational circuit is that its output depends only on the current inputs applied to the circuit. The output of a sequential circuit,
Chapter 4 Sequential Logic Circuits 4 1 The defining characteristic of a combinational circuit is that its output depends only on the current inputs applied to the circuit. The output of a sequential circuit,
PARAMETRIC OPTIMIZATION OF EDM USING MULTI-RESPONSE SIGNAL-TO- NOISE RATIO TECHNIQUE
 JPE (2016) Vol.19 (2) Payal, H., Maheshwari, S., Bharti, S.P. Original Scientific Paper PARAMETRIC OPTIMIZATION OF EDM USING MULTI-RESPONSE SIGNAL-TO- NOISE RATIO TECHNIQUE Received: 31 October 2016 /
JPE (2016) Vol.19 (2) Payal, H., Maheshwari, S., Bharti, S.P. Original Scientific Paper PARAMETRIC OPTIMIZATION OF EDM USING MULTI-RESPONSE SIGNAL-TO- NOISE RATIO TECHNIQUE Received: 31 October 2016 /
Dynamic analysis of 2-D and 3-D quasi-brittle solids and structures by D/BEM
 THEORETICAL AND APPLIED MECHANICS vol. 27, pp. 39-48, 2002 Dynamic analysis of 2-D and 3-D quasi-brittle solids and structures by D/BEM George D.Hatzigeorgiou and Dimitri E.Beskos Submitted 12 February,
THEORETICAL AND APPLIED MECHANICS vol. 27, pp. 39-48, 2002 Dynamic analysis of 2-D and 3-D quasi-brittle solids and structures by D/BEM George D.Hatzigeorgiou and Dimitri E.Beskos Submitted 12 February,
LOGIC CIRCUITS. Basic Experiment and Design of Electronics. Ho Kyung Kim, Ph.D.
 Basic Experiment and Design of Electronics LOGIC CIRCUITS Ho Kyung Kim, Ph.D. hokyung@pusan.ac.kr School of Mechanical Engineering Pusan National University Digital IC packages TTL (transistor-transistor
Basic Experiment and Design of Electronics LOGIC CIRCUITS Ho Kyung Kim, Ph.D. hokyung@pusan.ac.kr School of Mechanical Engineering Pusan National University Digital IC packages TTL (transistor-transistor
Overview Lecture 1. Nonlinear Control and Servo systems Lecture 1. Course Material. Course Goal. Course Material, cont. Lectures and labs.
 Overview Lecture Nonlinear Control and Servo sstems Lecture Anders Rantzer Practical information Course contents Nonlinear control sstems phenomena Nonlinear differential equations Automatic Control LTH
Overview Lecture Nonlinear Control and Servo sstems Lecture Anders Rantzer Practical information Course contents Nonlinear control sstems phenomena Nonlinear differential equations Automatic Control LTH
OA07 ANNEX 4: SCOPE OF ACCREDITATION IN CALIBRATION
 OA07 ANNEX 4: SCOPE OF ACCREDITATION IN CALIBRATION Table of contents 1 TECHNICAL FIELDS... 2 2 PRESENTING THE SCOPE OF A CALIBRATION LABOORATORY... 2 3 CONSIDERING CHANGES TO SCOPES... 6 4 CHANGES WITH
OA07 ANNEX 4: SCOPE OF ACCREDITATION IN CALIBRATION Table of contents 1 TECHNICAL FIELDS... 2 2 PRESENTING THE SCOPE OF A CALIBRATION LABOORATORY... 2 3 CONSIDERING CHANGES TO SCOPES... 6 4 CHANGES WITH
ZANIMLJIV NAČIN IZRAČUNAVANJA NEKIH GRANIČNIH VRIJEDNOSTI FUNKCIJA. Šefket Arslanagić, Sarajevo, BiH
 MAT-KOL (Banja Luka) XXIII ()(7), -7 http://wwwimviblorg/dmbl/dmblhtm DOI: 75/МК7A ISSN 5-6969 (o) ISSN 986-588 (o) ZANIMLJIV NAČIN IZRAČUNAVANJA NEKIH GRANIČNIH VRIJEDNOSTI FUNKCIJA Šefket Arslanagić,
MAT-KOL (Banja Luka) XXIII ()(7), -7 http://wwwimviblorg/dmbl/dmblhtm DOI: 75/МК7A ISSN 5-6969 (o) ISSN 986-588 (o) ZANIMLJIV NAČIN IZRAČUNAVANJA NEKIH GRANIČNIH VRIJEDNOSTI FUNKCIJA Šefket Arslanagić,
Fundamentals of Digital Design
 Fundamentals of Digital Design Digital Radiation Measurement and Spectroscopy NE/RHP 537 1 Binary Number System The binary numeral system, or base-2 number system, is a numeral system that represents numeric
Fundamentals of Digital Design Digital Radiation Measurement and Spectroscopy NE/RHP 537 1 Binary Number System The binary numeral system, or base-2 number system, is a numeral system that represents numeric
ATOMSKA APSORP SORPCIJSKA TROSKOP
 ATOMSKA APSORP SORPCIJSKA SPEKTROS TROSKOP OPIJA Written by Bette Kreuz Produced by Ruth Dusenbery University of Michigan-Dearborn 2000 Apsorpcija i emisija svjetlosti Fizika svjetlosti Spectroskopija
ATOMSKA APSORP SORPCIJSKA SPEKTROS TROSKOP OPIJA Written by Bette Kreuz Produced by Ruth Dusenbery University of Michigan-Dearborn 2000 Apsorpcija i emisija svjetlosti Fizika svjetlosti Spectroskopija
Fajl koji je korišćen može se naći na
 Machine learning Tumačenje matrice konfuzije i podataka Fajl koji je korišćen može se naći na http://www.technologyforge.net/datasets/. Fajl se odnosi na pečurke (Edible mushrooms). Svaka instanca je definisana
Machine learning Tumačenje matrice konfuzije i podataka Fajl koji je korišćen može se naći na http://www.technologyforge.net/datasets/. Fajl se odnosi na pečurke (Edible mushrooms). Svaka instanca je definisana
MREŽNI DIJAGRAMI Planiranje
 MREŽNI DIJAGRAMI Planiranje 1 Mrežno planiranje se zasniva na grafičkom prikazivanju aktivnosti usmerenim dužima. Dužina duži nema značenja, a sa dijagrama se vidi međuzavisnost aktivnosti. U mrežnom planiranju
MREŽNI DIJAGRAMI Planiranje 1 Mrežno planiranje se zasniva na grafičkom prikazivanju aktivnosti usmerenim dužima. Dužina duži nema značenja, a sa dijagrama se vidi međuzavisnost aktivnosti. U mrežnom planiranju