VoI for Learning and Inference! in Sensor Networks!
|
|
|
- Ginger Norris
- 6 years ago
- Views:
Transcription
1 ARO MURI on Value-centered Information Theory for Adaptive Learning, Inference, Tracking, and Exploitation VoI for Learning and Inference in Sensor Networks Gene Whipps 1,2, Emre Ertin 2, Randy Moses 2 1 U.S. Army Research Laboratory, Networked Sensing & Fusion Branch 2 The Ohio State University, Dept. of Electrical & Computer Engineering
2
3 Two axes of progress Progress 1: Distributed decision fusion: Propose a distributed detection framework to analyze large, random sensor networks [Year2] Analyze performance versus network constraints and under imperfect communications Progress 2 [new]: Distributed/decentralized learning: Learn low-dimensional manifold structure in high dimensions using a mixture of factor analyzers framework. Apply distributed EM from locally sufficient statistics Derive decentralized EM to approximate distributed learning via consensus averaging in network neighborhoods
4 Progress 1: Distributed decision fusion in single-hop, random sensor networks Performance analysis of a large sensor network Distributed detection of a rare event Each sensor observes a source and computes local feature vector Local decisions sent to fusion center to estimate state H Goal: Quantify fusion detection performance as a function of sensor network density Challenge: Increasing sensor density requires decreasing per node data rate to meet network constraints Desensitize local sensor detections (increase τ) as network density increases Local thresholds τ Counting Rule Fusion threshold κ

5 Progress 1: Distributed decision fusion in single-hop, random sensor networks P M (=1-P D ) vs Sensor Density, Fixed H 0 communication traffic As sensor node density increases: Constrain the rate of sensor reporting to maintain the same average network communication load under H 0 Quantify performance under H 1 Prob. of missed detection P FA3 P P FA2 FA1 Sensor Density Perfect communications to fusion center.
6 Progress 1: Distributed decision fusion with communications collisions Imperfect communications: Slotted-ALOHA... Sensing Period k Comms Period k Sensing Period k+1 Comms Period k M 1 2 M... MAC Properties Poisson(λ) nodes sharing M slots Fusion delay is proportional to M Only sensors with local detections transmit Sensor nodes select a slot according to a discrete uniform distribution No collision avoidance mechanism is used No retransmissions are made if collisions occur At Fusion Center M 0 slots have no transmissions M 1 slots have (single) detection transmissions M C slots have collisions ( 1 detection) For assumed target parameters: Optimal Fusion Rule: α M 1 + β M C S-ALOHA, λh avg. nodes transmit Only sensors with detections transmit
7 Progress 1: Distributed decision fusion with communications collisions ROC, M=5 slots, λp0=0.5 Prob. of detection dotted: perfect comms solid: slotted ALOHA λp1=5 λp1=7 λp1=9 Pd vs M slots, Pfa=10-5, λp0=0.5 Prob. of false alarm Prob. of detection λp1=5 λp1=7 λp1=9 M (slots)
 or a neighborhood (decentralized) to")
8 Progress 2: Distributed learning of a mixture of factor analyzers Learning low-dimensional manifolds: Distributed and decentralized unsupervised learning of low dimensional manifold from high dimensional observations Each sensor observes its environment and computes local sufficient statistics Local statistics sent to fusion center (distributed) or a neighborhood (decentralized) to estimate global model Goal: Design unsupervised learning methods and study convergence properties Data lives on a lower dimensional subspace From: Saul, L. and Roweis, S., Think Globally, Fit Locally: Unsupervised Learning of Nonlinear Manifold, Technical Report MS CIS-02-18, University of Pennsylvania,
9 Progress 2: Distributed learning of MFAs VOI Approach: Gaussian Mixture Model (GMM) representation Locally linear approximation: Mixture of Factor Analyzers (MFA) Roweis, S., et al., 2001; Verbeek 2006 Fusion of GMM; Local sensors see only a subset of data modes Sensor estimate MFA means and low-rank covariances Consensus is used to align local estimates Express needed MFA representation as functions of means Modes are initialized by distributed or decentralized k-means Network information flow Distributed Each node has a comm path to a fusion center Decentralized Nodes are connected; no fusion center

10 Progress 2: Distributed learning of a mixture of factor analyzers Synthetic data example Unconstrained parameter estimates 21 Sensor nodes, 6D data; 1D NL manifold 1-σ lines centered on local means This is a depiction of the manifold in 2, 3 of the dimensions. Increases data likelihood Distributed data log-likelihood distributed decentralized Iterations on global estimates (decentralized: consensus iterations for each global iterate) Decentralized
11 Future and ongoing focus areas and collaborations Study VoI performance tradeoffs with respect to: network density, data complexity (number of mixtures), and network structure Study convergence rates of data representations with respect to network connectivity and data representation complexity. Investigate model order learning and adaptation in decentralized setting Investigate extensions to multiple sensor modalities. Compare alternative strategies for target manifold learning (Hero + Ertin)
Distributed Detection of Binary Decisions with Collisions in a Large, Random Network
 Distributed Detection of Binary Decisions with Collisions in a Large, Random Network Gene T Whipps, Emre Ertin, and Randolph L Moses US Army Research Laboratory, Adelphi, MD 2783 Department of Electrical
Distributed Detection of Binary Decisions with Collisions in a Large, Random Network Gene T Whipps, Emre Ertin, and Randolph L Moses US Army Research Laboratory, Adelphi, MD 2783 Department of Electrical
Threshold Considerations in Distributed Detection in a Network of Sensors.
 Threshold Considerations in Distributed Detection in a Network of Sensors. Gene T. Whipps 1,2, Emre Ertin 2, and Randolph L. Moses 2 1 US Army Research Laboratory, Adelphi, MD 20783 2 Department of Electrical
Threshold Considerations in Distributed Detection in a Network of Sensors. Gene T. Whipps 1,2, Emre Ertin 2, and Randolph L. Moses 2 1 US Army Research Laboratory, Adelphi, MD 20783 2 Department of Electrical
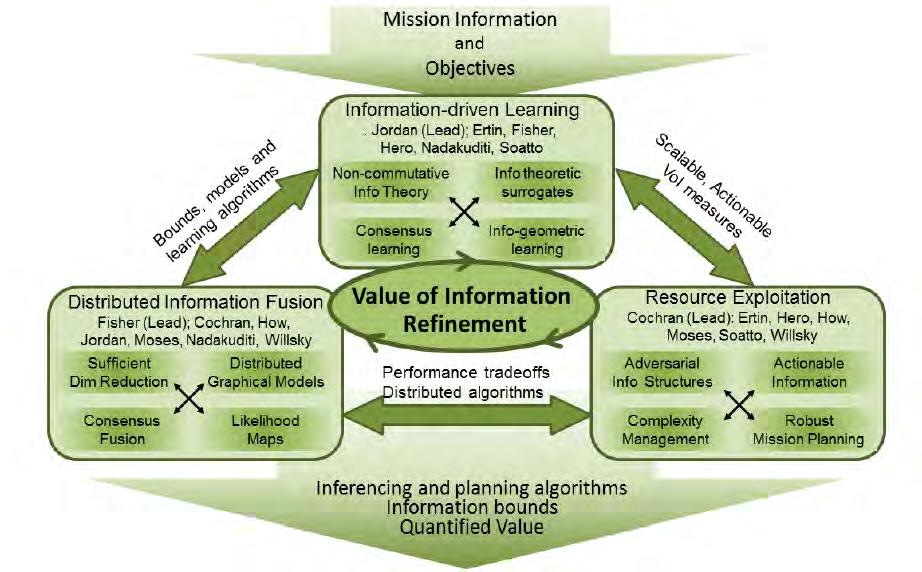
Information-driven learning, distributed fusion, and planning
 ARO ARO MURI MURI on on Value-centered Theory Theory for for Adaptive Learning, Inference, Tracking, and and Exploitation -driven learning, distributed fusion, and planning Co-PI Alfred Hero University
ARO ARO MURI MURI on on Value-centered Theory Theory for for Adaptive Learning, Inference, Tracking, and and Exploitation -driven learning, distributed fusion, and planning Co-PI Alfred Hero University
Distributed detection of topological changes in communication networks. Riccardo Lucchese, Damiano Varagnolo, Karl H. Johansson
 1 Distributed detection of topological changes in communication networks Riccardo Lucchese, Damiano Varagnolo, Karl H. Johansson Thanks to... 2 The need: detecting changes in topological networks 3 The
1 Distributed detection of topological changes in communication networks Riccardo Lucchese, Damiano Varagnolo, Karl H. Johansson Thanks to... 2 The need: detecting changes in topological networks 3 The
CS281 Section 4: Factor Analysis and PCA
 CS81 Section 4: Factor Analysis and PCA Scott Linderman At this point we have seen a variety of machine learning models, with a particular emphasis on models for supervised learning. In particular, we
CS81 Section 4: Factor Analysis and PCA Scott Linderman At this point we have seen a variety of machine learning models, with a particular emphasis on models for supervised learning. In particular, we
ACONSENSUS-BASEDDECENTRALIZEDEMFORAMIXTUREOFFACTORANALYZERS. Gene T. Whipps Emre Ertin Randolph L. Moses
 214 IEEE INERNAIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING, SEP. 21 24, 214, REIMS, FRANCE ACONSENSUS-BASEDDECENRALIZEDEMFORAMIXUREOFFACORANALYZERS Gene. Whipps Emre Ertin Randolph L. Moses
214 IEEE INERNAIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING, SEP. 21 24, 214, REIMS, FRANCE ACONSENSUS-BASEDDECENRALIZEDEMFORAMIXUREOFFACORANALYZERS Gene. Whipps Emre Ertin Randolph L. Moses
Gaussian Mixture Models
 Gaussian Mixture Models Pradeep Ravikumar Co-instructor: Manuela Veloso Machine Learning 10-701 Some slides courtesy of Eric Xing, Carlos Guestrin (One) bad case for K- means Clusters may overlap Some
Gaussian Mixture Models Pradeep Ravikumar Co-instructor: Manuela Veloso Machine Learning 10-701 Some slides courtesy of Eric Xing, Carlos Guestrin (One) bad case for K- means Clusters may overlap Some
Simultaneous and sequential detection of multiple interacting change points
 Simultaneous and sequential detection of multiple interacting change points Long Nguyen Department of Statistics University of Michigan Joint work with Ram Rajagopal (Stanford University) 1 Introduction
Simultaneous and sequential detection of multiple interacting change points Long Nguyen Department of Statistics University of Michigan Joint work with Ram Rajagopal (Stanford University) 1 Introduction
Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment
 Acoustical Society of America Meeting Fall 2005 Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment Vivek Varadarajan and Jeffrey Krolik Duke University Department
Acoustical Society of America Meeting Fall 2005 Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment Vivek Varadarajan and Jeffrey Krolik Duke University Department
Distributed Detection and Estimation in Wireless Sensor Networks: Resource Allocation, Fusion Rules, and Network Security
 Distributed Detection and Estimation in Wireless Sensor Networks: Resource Allocation, Fusion Rules, and Network Security Edmond Nurellari The University of Leeds, UK School of Electronic and Electrical
Distributed Detection and Estimation in Wireless Sensor Networks: Resource Allocation, Fusion Rules, and Network Security Edmond Nurellari The University of Leeds, UK School of Electronic and Electrical
Communication constraints and latency in Networked Control Systems
 Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
Novel spectrum sensing schemes for Cognitive Radio Networks
 Novel spectrum sensing schemes for Cognitive Radio Networks Cantabria University Santander, May, 2015 Supélec, SCEE Rennes, France 1 The Advanced Signal Processing Group http://gtas.unican.es The Advanced
Novel spectrum sensing schemes for Cognitive Radio Networks Cantabria University Santander, May, 2015 Supélec, SCEE Rennes, France 1 The Advanced Signal Processing Group http://gtas.unican.es The Advanced
Recovery of Low-Rank Plus Compressed Sparse Matrices with Application to Unveiling Traffic Anomalies
 July 12, 212 Recovery of Low-Rank Plus Compressed Sparse Matrices with Application to Unveiling Traffic Anomalies Morteza Mardani Dept. of ECE, University of Minnesota, Minneapolis, MN 55455 Acknowledgments:
July 12, 212 Recovery of Low-Rank Plus Compressed Sparse Matrices with Application to Unveiling Traffic Anomalies Morteza Mardani Dept. of ECE, University of Minnesota, Minneapolis, MN 55455 Acknowledgments:
Introduction to Statistical Inference
 Structural Health Monitoring Using Statistical Pattern Recognition Introduction to Statistical Inference Presented by Charles R. Farrar, Ph.D., P.E. Outline Introduce statistical decision making for Structural
Structural Health Monitoring Using Statistical Pattern Recognition Introduction to Statistical Inference Presented by Charles R. Farrar, Ph.D., P.E. Outline Introduce statistical decision making for Structural
Tuning the TCP Timeout Mechanism in Wireless Networks to Maximize Throughput via Stochastic Stopping Time Methods
 Tuning the TCP Timeout Mechanism in Wireless Networks to Maximize Throughput via Stochastic Stopping Time Methods George Papageorgiou and John S. Baras Abstract We present an optimization problem that
Tuning the TCP Timeout Mechanism in Wireless Networks to Maximize Throughput via Stochastic Stopping Time Methods George Papageorgiou and John S. Baras Abstract We present an optimization problem that
Adaptive Multi-Modal Sensing of General Concealed Targets
 Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
arxiv:cs/ v1 [cs.ni] 27 Feb 2007
![arxiv:cs/ v1 [cs.ni] 27 Feb 2007](/thumbs/95/126266395.jpg "arxiv:cs/ v1 [cs.ni] 27 Feb 2007") Joint Design and Separation Principle for Opportunistic Spectrum Access in the Presence of Sensing Errors Yunxia Chen, Qing Zhao, and Ananthram Swami Abstract arxiv:cs/0702158v1 [cs.ni] 27 Feb 2007 We
Joint Design and Separation Principle for Opportunistic Spectrum Access in the Presence of Sensing Errors Yunxia Chen, Qing Zhao, and Ananthram Swami Abstract arxiv:cs/0702158v1 [cs.ni] 27 Feb 2007 We
CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE
 CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE Anshul Sharma and Randolph L. Moses Department of Electrical Engineering, The Ohio State University, Columbus, OH 43210 ABSTRACT We have developed
CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE Anshul Sharma and Randolph L. Moses Department of Electrical Engineering, The Ohio State University, Columbus, OH 43210 ABSTRACT We have developed
APOCS: A RAPIDLY CONVERGENT SOURCE LOCALIZATION ALGORITHM FOR SENSOR NETWORKS. Doron Blatt and Alfred O. Hero, III
 APOCS: A RAPIDLY CONVERGENT SOURCE LOCALIZATION ALGORITHM FOR SENSOR NETWORKS Doron Blatt and Alfred O. Hero, III Department of Electrical Engineering and Computer Science, University of Michigan, Ann
APOCS: A RAPIDLY CONVERGENT SOURCE LOCALIZATION ALGORITHM FOR SENSOR NETWORKS Doron Blatt and Alfred O. Hero, III Department of Electrical Engineering and Computer Science, University of Michigan, Ann
MATCHED SUBSPACE DETECTORS FOR DISCRIMINATION OF TARGETS FROM TREES IN SAR IMAGERY
 MATCHED SUBSPACE DETECTORS FOR DISCRIMINATION OF TARGETS FROM TREES IN SAR IMAGERY A. Shanna and R. L. Moses Department of Electrical Engineering The Ohio State University Columbus, OH 43210 USA ABSTRACT
MATCHED SUBSPACE DETECTORS FOR DISCRIMINATION OF TARGETS FROM TREES IN SAR IMAGERY A. Shanna and R. L. Moses Department of Electrical Engineering The Ohio State University Columbus, OH 43210 USA ABSTRACT
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a
 Lecture 20.a") Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
2. What are the tradeoffs among different measures of error (e.g. probability of false alarm, probability of miss, etc.)?
?") ECE 830 / CS 76 Spring 06 Instructors: R. Willett & R. Nowak Lecture 3: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we
ECE 830 / CS 76 Spring 06 Instructors: R. Willett & R. Nowak Lecture 3: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we
Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics. 1 Executive summary
 ECE 830 Spring 207 Instructor: R. Willett Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we saw that the likelihood
ECE 830 Spring 207 Instructor: R. Willett Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we saw that the likelihood
Likelihood as a Method of Multi Sensor Data Fusion for Target Tracking
 Likelihood as a Method of Multi Sensor Data Fusion for Target Tracking A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio
Likelihood as a Method of Multi Sensor Data Fusion for Target Tracking A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio
Computer Vision Group Prof. Daniel Cremers. 6. Mixture Models and Expectation-Maximization
 Prof. Daniel Cremers 6. Mixture Models and Expectation-Maximization Motivation Often the introduction of latent (unobserved) random variables into a model can help to express complex (marginal) distributions
Prof. Daniel Cremers 6. Mixture Models and Expectation-Maximization Motivation Often the introduction of latent (unobserved) random variables into a model can help to express complex (marginal) distributions
Detection theory 101 ELEC-E5410 Signal Processing for Communications
 Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Decentralized Sequential Change Detection Using Physical Layer Fusion
 Decentralized Sequential Change Detection Using hysical Layer Fusion Leena Zacharias ECE Department Indian Institute of Science Bangalore, India Email: zleena@ece.iisc.ernet.in ajesh Sundaresan ECE Department
Decentralized Sequential Change Detection Using hysical Layer Fusion Leena Zacharias ECE Department Indian Institute of Science Bangalore, India Email: zleena@ece.iisc.ernet.in ajesh Sundaresan ECE Department
Multiple Bits Distributed Moving Horizon State Estimation for Wireless Sensor Networks. Ji an Luo
 Multiple Bits Distributed Moving Horizon State Estimation for Wireless Sensor Networks Ji an Luo 2008.6.6 Outline Background Problem Statement Main Results Simulation Study Conclusion Background Wireless
Multiple Bits Distributed Moving Horizon State Estimation for Wireless Sensor Networks Ji an Luo 2008.6.6 Outline Background Problem Statement Main Results Simulation Study Conclusion Background Wireless
If there exists a threshold k 0 such that. then we can take k = k 0 γ =0 and achieve a test of size α. c 2004 by Mark R. Bell,
 Recall The Neyman-Pearson Lemma Neyman-Pearson Lemma: Let Θ = {θ 0, θ }, and let F θ0 (x) be the cdf of the random vector X under hypothesis and F θ (x) be its cdf under hypothesis. Assume that the cdfs
Recall The Neyman-Pearson Lemma Neyman-Pearson Lemma: Let Θ = {θ 0, θ }, and let F θ0 (x) be the cdf of the random vector X under hypothesis and F θ (x) be its cdf under hypothesis. Assume that the cdfs
Lecture 3: Latent Variables Models and Learning with the EM Algorithm. Sam Roweis. Tuesday July25, 2006 Machine Learning Summer School, Taiwan
 Lecture 3: Latent Variables Models and Learning with the EM Algorithm Sam Roweis Tuesday July25, 2006 Machine Learning Summer School, Taiwan Latent Variable Models What to do when a variable z is always
Lecture 3: Latent Variables Models and Learning with the EM Algorithm Sam Roweis Tuesday July25, 2006 Machine Learning Summer School, Taiwan Latent Variable Models What to do when a variable z is always
Cooperative Spectrum Sensing for Cognitive Radios under Bandwidth Constraints
 Cooperative Spectrum Sensing for Cognitive Radios under Bandwidth Constraints Chunhua Sun, Wei Zhang, and haled Ben Letaief, Fellow, IEEE Department of Electronic and Computer Engineering The Hong ong
Cooperative Spectrum Sensing for Cognitive Radios under Bandwidth Constraints Chunhua Sun, Wei Zhang, and haled Ben Letaief, Fellow, IEEE Department of Electronic and Computer Engineering The Hong ong
Dynamic Multipath Estimation by Sequential Monte Carlo Methods
 Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming
 Stability Analysis in a Cognitive Radio System with Cooperative Beamforming Mohammed Karmoose 1 Ahmed Sultan 1 Moustafa Youseff 2 1 Electrical Engineering Dept, Alexandria University 2 E-JUST Agenda 1
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming Mohammed Karmoose 1 Ahmed Sultan 1 Moustafa Youseff 2 1 Electrical Engineering Dept, Alexandria University 2 E-JUST Agenda 1
arxiv: v1 [stat.co] 23 Apr 2018
![arxiv: v1 [stat.co] 23 Apr 2018](/thumbs/93/112368199.jpg "arxiv: v1 [stat.co] 23 Apr 2018") Bayesian Updating and Uncertainty Quantification using Sequential Tempered MCMC with the Rank-One Modified Metropolis Algorithm Thomas A. Catanach and James L. Beck arxiv:1804.08738v1 [stat.co] 23 Apr
Bayesian Updating and Uncertainty Quantification using Sequential Tempered MCMC with the Rank-One Modified Metropolis Algorithm Thomas A. Catanach and James L. Beck arxiv:1804.08738v1 [stat.co] 23 Apr
Nonlinear Dimensionality Reduction. Jose A. Costa
 Nonlinear Dimensionality Reduction Jose A. Costa Mathematics of Information Seminar, Dec. Motivation Many useful of signals such as: Image databases; Gene expression microarrays; Internet traffic time
Nonlinear Dimensionality Reduction Jose A. Costa Mathematics of Information Seminar, Dec. Motivation Many useful of signals such as: Image databases; Gene expression microarrays; Internet traffic time
Statistical Models and Algorithms for Real-Time Anomaly Detection Using Multi-Modal Data
 Statistical Models and Algorithms for Real-Time Anomaly Detection Using Multi-Modal Data Taposh Banerjee University of Texas at San Antonio Joint work with Gene Whipps (US Army Research Laboratory) Prudhvi
Statistical Models and Algorithms for Real-Time Anomaly Detection Using Multi-Modal Data Taposh Banerjee University of Texas at San Antonio Joint work with Gene Whipps (US Army Research Laboratory) Prudhvi
Distributed Estimation and Detection for Smart Grid
 Distributed Estimation and Detection for Smart Grid Texas A&M University Joint Wor with: S. Kar (CMU), R. Tandon (Princeton), H. V. Poor (Princeton), and J. M. F. Moura (CMU) 1 Distributed Estimation/Detection
Distributed Estimation and Detection for Smart Grid Texas A&M University Joint Wor with: S. Kar (CMU), R. Tandon (Princeton), H. V. Poor (Princeton), and J. M. F. Moura (CMU) 1 Distributed Estimation/Detection
4th IMPRS Astronomy Summer School Drawing Astrophysical Inferences from Data Sets
 4th IMPRS Astronomy Summer School Drawing Astrophysical Inferences from Data Sets William H. Press The University of Texas at Austin Lecture 6 IMPRS Summer School 2009, Prof. William H. Press 1 Mixture
4th IMPRS Astronomy Summer School Drawing Astrophysical Inferences from Data Sets William H. Press The University of Texas at Austin Lecture 6 IMPRS Summer School 2009, Prof. William H. Press 1 Mixture
Cooperative Spectrum Prediction for Improved Efficiency of Cognitive Radio Networks
 Cooperative Spectrum Prediction for Improved Efficiency of Cognitive Radio Networks by Nagwa Shaghluf B.S., Tripoli University, Tripoli, Libya, 2009 A Thesis Submitted in Partial Fulfillment of the Requirements
Cooperative Spectrum Prediction for Improved Efficiency of Cognitive Radio Networks by Nagwa Shaghluf B.S., Tripoli University, Tripoli, Libya, 2009 A Thesis Submitted in Partial Fulfillment of the Requirements
Focus was on solving matrix inversion problems Now we look at other properties of matrices Useful when A represents a transformations.
 Previously Focus was on solving matrix inversion problems Now we look at other properties of matrices Useful when A represents a transformations y = Ax Or A simply represents data Notion of eigenvectors,
Previously Focus was on solving matrix inversion problems Now we look at other properties of matrices Useful when A represents a transformations y = Ax Or A simply represents data Notion of eigenvectors,
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
ECE 521. Lecture 11 (not on midterm material) 13 February K-means clustering, Dimensionality reduction
 13 February K-means clustering, Dimensionality reduction") ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
Chapter 2. Binary and M-ary Hypothesis Testing 2.1 Introduction (Levy 2.1)
") Chapter 2. Binary and M-ary Hypothesis Testing 2.1 Introduction (Levy 2.1) Detection problems can usually be casted as binary or M-ary hypothesis testing problems. Applications: This chapter: Simple hypothesis
Chapter 2. Binary and M-ary Hypothesis Testing 2.1 Introduction (Levy 2.1) Detection problems can usually be casted as binary or M-ary hypothesis testing problems. Applications: This chapter: Simple hypothesis
WE consider the problem of detecting and localizing a material
 1886 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 Detection and Localization of Material Releases With Sparse Sensor Configurations Emily B. Fox, Student Member, IEEE, John W. Fisher,
1886 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 Detection and Localization of Material Releases With Sparse Sensor Configurations Emily B. Fox, Student Member, IEEE, John W. Fisher,
Fully-distributed spectrum sensing: application to cognitive radio
 Fully-distributed spectrum sensing: application to cognitive radio Philippe Ciblat Dpt Comelec, Télécom ParisTech Joint work with F. Iutzeler (PhD student funded by DGA grant) Cognitive radio principle
Fully-distributed spectrum sensing: application to cognitive radio Philippe Ciblat Dpt Comelec, Télécom ParisTech Joint work with F. Iutzeler (PhD student funded by DGA grant) Cognitive radio principle
Distributed estimation in sensor networks
 in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
Multiaccess Communication
 Information Networks p. 1 Multiaccess Communication Satellite systems, radio networks (WLAN), Ethernet segment The received signal is the sum of attenuated transmitted signals from a set of other nodes,
Information Networks p. 1 Multiaccess Communication Satellite systems, radio networks (WLAN), Ethernet segment The received signal is the sum of attenuated transmitted signals from a set of other nodes,
Optimal Transmission Strategies for Dynamic Spectrum Access in Cognitive Radio Networks. Senhua Huang, Xin Liu, and Zhi Ding
 1 Optimal Transmission Strategies for Dynamic Spectrum Access in Cognitive Radio Networks Senhua Huang, Xin Liu, and Zhi Ding Abstract Cognitive radio offers a promising technology to mitigate spectrum
1 Optimal Transmission Strategies for Dynamic Spectrum Access in Cognitive Radio Networks Senhua Huang, Xin Liu, and Zhi Ding Abstract Cognitive radio offers a promising technology to mitigate spectrum
QUANTIZATION FOR DISTRIBUTED ESTIMATION IN LARGE SCALE SENSOR NETWORKS
 QUANTIZATION FOR DISTRIBUTED ESTIMATION IN LARGE SCALE SENSOR NETWORKS Parvathinathan Venkitasubramaniam, Gökhan Mergen, Lang Tong and Ananthram Swami ABSTRACT We study the problem of quantization for
QUANTIZATION FOR DISTRIBUTED ESTIMATION IN LARGE SCALE SENSOR NETWORKS Parvathinathan Venkitasubramaniam, Gökhan Mergen, Lang Tong and Ananthram Swami ABSTRACT We study the problem of quantization for
Cooperatively Learning Footprints of Multiple Incumbent Transmitters by Using Cognitive Radio Networks
 Cooperatively Learning Footprints of Multiple Incumbent Transmitters by Using Cognitive Radio Networks Mihir Laghate, Student Member, IEEE, and Danijela Cabric, Senior Member, IEEE Abstract Energy measurements
Cooperatively Learning Footprints of Multiple Incumbent Transmitters by Using Cognitive Radio Networks Mihir Laghate, Student Member, IEEE, and Danijela Cabric, Senior Member, IEEE Abstract Energy measurements
TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT
 TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT Feng Lin, Robert C. Qiu, James P. Browning, Michael C. Wicks Cognitive Radio Institute, Department of Electrical and Computer
TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT Feng Lin, Robert C. Qiu, James P. Browning, Michael C. Wicks Cognitive Radio Institute, Department of Electrical and Computer
20 Unsupervised Learning and Principal Components Analysis (PCA)
") 116 Jonathan Richard Shewchuk 20 Unsupervised Learning and Principal Components Analysis (PCA) UNSUPERVISED LEARNING We have sample points, but no labels! No classes, no y-values, nothing to predict. Goal:
116 Jonathan Richard Shewchuk 20 Unsupervised Learning and Principal Components Analysis (PCA) UNSUPERVISED LEARNING We have sample points, but no labels! No classes, no y-values, nothing to predict. Goal:
Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University
 Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University Abnormal Activity Detection and Tracking 1 The Problem Goal: To track activities
Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University Abnormal Activity Detection and Tracking 1 The Problem Goal: To track activities
Dimension Reduction. David M. Blei. April 23, 2012
 Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
Machine Learning Techniques for Computer Vision
 Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Clustering K-means. Machine Learning CSE546. Sham Kakade University of Washington. November 15, Review: PCA Start: unsupervised learning
 Clustering K-means Machine Learning CSE546 Sham Kakade University of Washington November 15, 2016 1 Announcements: Project Milestones due date passed. HW3 due on Monday It ll be collaborative HW2 grades
Clustering K-means Machine Learning CSE546 Sham Kakade University of Washington November 15, 2016 1 Announcements: Project Milestones due date passed. HW3 due on Monday It ll be collaborative HW2 grades
بسم الله الرحمن الرحيم
 بسم الله الرحمن الرحيم Reliability Improvement of Distributed Detection in Clustered Wireless Sensor Networks 1 RELIABILITY IMPROVEMENT OF DISTRIBUTED DETECTION IN CLUSTERED WIRELESS SENSOR NETWORKS PH.D.
بسم الله الرحمن الرحيم Reliability Improvement of Distributed Detection in Clustered Wireless Sensor Networks 1 RELIABILITY IMPROVEMENT OF DISTRIBUTED DETECTION IN CLUSTERED WIRELESS SENSOR NETWORKS PH.D.
Wireless Internet Exercises
 Wireless Internet Exercises Prof. Alessandro Redondi 2018-05-28 1 WLAN 1.1 Exercise 1 A Wi-Fi network has the following features: Physical layer transmission rate: 54 Mbps MAC layer header: 28 bytes MAC
Wireless Internet Exercises Prof. Alessandro Redondi 2018-05-28 1 WLAN 1.1 Exercise 1 A Wi-Fi network has the following features: Physical layer transmission rate: 54 Mbps MAC layer header: 28 bytes MAC
Semi-Supervised Learning by Multi-Manifold Separation
 Semi-Supervised Learning by Multi-Manifold Separation Xiaojin (Jerry) Zhu Department of Computer Sciences University of Wisconsin Madison Joint work with Andrew Goldberg, Zhiting Xu, Aarti Singh, and Rob
Semi-Supervised Learning by Multi-Manifold Separation Xiaojin (Jerry) Zhu Department of Computer Sciences University of Wisconsin Madison Joint work with Andrew Goldberg, Zhiting Xu, Aarti Singh, and Rob
Efficient Sensor Network Planning Method. Using Approximate Potential Game
 Efficient Sensor Network Planning Method 1 Using Approximate Potential Game Su-Jin Lee, Young-Jin Park, and Han-Lim Choi, Member, IEEE arxiv:1707.00796v1 [cs.gt] 4 Jul 2017 Abstract This paper addresses
Efficient Sensor Network Planning Method 1 Using Approximate Potential Game Su-Jin Lee, Young-Jin Park, and Han-Lim Choi, Member, IEEE arxiv:1707.00796v1 [cs.gt] 4 Jul 2017 Abstract This paper addresses
MULTIPLE-CHANNEL DETECTION IN ACTIVE SENSING. Kaitlyn Beaudet and Douglas Cochran
 MULTIPLE-CHANNEL DETECTION IN ACTIVE SENSING Kaitlyn Beaudet and Douglas Cochran School of Electrical, Computer and Energy Engineering Arizona State University, Tempe AZ 85287-576 USA ABSTRACT The problem
MULTIPLE-CHANNEL DETECTION IN ACTIVE SENSING Kaitlyn Beaudet and Douglas Cochran School of Electrical, Computer and Energy Engineering Arizona State University, Tempe AZ 85287-576 USA ABSTRACT The problem
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Ensemble Methods. NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan
 Ensemble Methods NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan How do you make a decision? What do you want for lunch today?! What did you have last night?! What are your favorite
Ensemble Methods NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan How do you make a decision? What do you want for lunch today?! What did you have last night?! What are your favorite
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Thrust #3 Active Information Exploitation for Resource Management. Value of Information Sharing In Networked Systems. Doug Cochran
 ARO MURI on Value-centered Theory for Adaptive Learning, Inference, Tracking, and Exploitation Thrust #3 Active Exploitation for Resource Management Value Sharing In Networked Systems Doug Cochran Synopsis
ARO MURI on Value-centered Theory for Adaptive Learning, Inference, Tracking, and Exploitation Thrust #3 Active Exploitation for Resource Management Value Sharing In Networked Systems Doug Cochran Synopsis
Cooperative HARQ with Poisson Interference and Opportunistic Routing
 Cooperative HARQ with Poisson Interference and Opportunistic Routing Amogh Rajanna & Mostafa Kaveh Department of Electrical and Computer Engineering University of Minnesota, Minneapolis, MN USA. Outline
Cooperative HARQ with Poisson Interference and Opportunistic Routing Amogh Rajanna & Mostafa Kaveh Department of Electrical and Computer Engineering University of Minnesota, Minneapolis, MN USA. Outline
Opportunistic Spectrum Access for Energy-Constrained Cognitive Radios
 1206 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 8, NO. 3, MARCH 2009 Opportunistic Spectrum Access for Energy-Constrained Cognitive Radios Anh Tuan Hoang, Ying-Chang Liang, David Tung Chong Wong,
1206 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 8, NO. 3, MARCH 2009 Opportunistic Spectrum Access for Energy-Constrained Cognitive Radios Anh Tuan Hoang, Ying-Chang Liang, David Tung Chong Wong,
Clustering VS Classification
 MCQ Clustering VS Classification 1. What is the relation between the distance between clusters and the corresponding class discriminability? a. proportional b. inversely-proportional c. no-relation Ans:
MCQ Clustering VS Classification 1. What is the relation between the distance between clusters and the corresponding class discriminability? a. proportional b. inversely-proportional c. no-relation Ans:
Data-Efficient Quickest Change Detection
 Data-Efficient Quickest Change Detection Venu Veeravalli ECE Department & Coordinated Science Lab University of Illinois at Urbana-Champaign http://www.ifp.illinois.edu/~vvv (joint work with Taposh Banerjee)
Data-Efficient Quickest Change Detection Venu Veeravalli ECE Department & Coordinated Science Lab University of Illinois at Urbana-Champaign http://www.ifp.illinois.edu/~vvv (joint work with Taposh Banerjee)
Lecture 6: Gaussian Mixture Models (GMM)
") Helsinki Institute for Information Technology Lecture 6: Gaussian Mixture Models (GMM) Pedram Daee 3.11.2015 Outline Gaussian Mixture Models (GMM) Models Model families and parameters Parameter learning
Helsinki Institute for Information Technology Lecture 6: Gaussian Mixture Models (GMM) Pedram Daee 3.11.2015 Outline Gaussian Mixture Models (GMM) Models Model families and parameters Parameter learning
Decentralized Sequential Hypothesis Testing. Change Detection
 Decentralized Sequential Hypothesis Testing & Change Detection Giorgos Fellouris, Columbia University, NY, USA George V. Moustakides, University of Patras, Greece Outline Sequential hypothesis testing
Decentralized Sequential Hypothesis Testing & Change Detection Giorgos Fellouris, Columbia University, NY, USA George V. Moustakides, University of Patras, Greece Outline Sequential hypothesis testing
Machine Learning. CUNY Graduate Center, Spring Lectures 11-12: Unsupervised Learning 1. Professor Liang Huang.
 Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
RECENTLY, wireless sensor networks have been the object
 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 4, APRIL 2007 1511 Distributed Sequential Bayesian Estimation of a Diffusive Source in Wireless Sensor Networks Tong Zhao, Student Member, IEEE, and
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 4, APRIL 2007 1511 Distributed Sequential Bayesian Estimation of a Diffusive Source in Wireless Sensor Networks Tong Zhao, Student Member, IEEE, and
Analysis of DualCUSUM: a Distributed Energy Efficient Algorithm for Change Detection
 NCC 29, January 6-8, IIT Guwahati 29 of DualCUSUM: a Distributed Energy Efficient Algorithm for Change Detection Taposh Banerjee and Vinod Sharma Electrical Communication Engineering, Indian Institute
NCC 29, January 6-8, IIT Guwahati 29 of DualCUSUM: a Distributed Energy Efficient Algorithm for Change Detection Taposh Banerjee and Vinod Sharma Electrical Communication Engineering, Indian Institute
Lecture 7: Con3nuous Latent Variable Models
 CSC2515 Fall 2015 Introduc3on to Machine Learning Lecture 7: Con3nuous Latent Variable Models All lecture slides will be available as.pdf on the course website: http://www.cs.toronto.edu/~urtasun/courses/csc2515/
CSC2515 Fall 2015 Introduc3on to Machine Learning Lecture 7: Con3nuous Latent Variable Models All lecture slides will be available as.pdf on the course website: http://www.cs.toronto.edu/~urtasun/courses/csc2515/
Markov decision processes with threshold-based piecewise-linear optimal policies
 1/31 Markov decision processes with threshold-based piecewise-linear optimal policies T. Erseghe, A. Zanella, C. Codemo Dept. of Information Engineering, University of Padova, Italy Padova, June 2, 213
1/31 Markov decision processes with threshold-based piecewise-linear optimal policies T. Erseghe, A. Zanella, C. Codemo Dept. of Information Engineering, University of Padova, Italy Padova, June 2, 213
requests/sec. The total channel load is requests/sec. Using slot as the time unit, the total channel load is 50 ( ) = 1
 = 1") Prof. X. Shen E&CE 70 : Examples #2 Problem Consider the following Aloha systems. (a) A group of N users share a 56 kbps pure Aloha channel. Each user generates at a Passion rate of one 000-bit packet
Prof. X. Shen E&CE 70 : Examples #2 Problem Consider the following Aloha systems. (a) A group of N users share a 56 kbps pure Aloha channel. Each user generates at a Passion rate of one 000-bit packet
Bayesian Decision Theory
 Introduction to Pattern Recognition [ Part 4 ] Mahdi Vasighi Remarks It is quite common to assume that the data in each class are adequately described by a Gaussian distribution. Bayesian classifier is
Introduction to Pattern Recognition [ Part 4 ] Mahdi Vasighi Remarks It is quite common to assume that the data in each class are adequately described by a Gaussian distribution. Bayesian classifier is
Bayesian Networks Inference with Probabilistic Graphical Models
 4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
Data Analysis and Manifold Learning Lecture 6: Probabilistic PCA and Factor Analysis
 Data Analysis and Manifold Learning Lecture 6: Probabilistic PCA and Factor Analysis Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline of Lecture
Data Analysis and Manifold Learning Lecture 6: Probabilistic PCA and Factor Analysis Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline of Lecture
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
Distributed Inference and Learning with Byzantine Data
 Syracuse University SURFACE Dissertations - ALL SURFACE 8-1-2016 Distributed Inference and Learning with Byzantine Data Bhavya Kailkhura Syracuse University Follow this and additional works at: http://surface.syr.edu/etd
Syracuse University SURFACE Dissertations - ALL SURFACE 8-1-2016 Distributed Inference and Learning with Byzantine Data Bhavya Kailkhura Syracuse University Follow this and additional works at: http://surface.syr.edu/etd
L11: Pattern recognition principles
 L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
Distributed Particle Filters: Stability Results and Graph-based Compression of Weighted Particle Clouds
 Distributed Particle Filters: Stability Results and Graph-based Compression of Weighted Particle Clouds Michael Rabbat Joint with: Syamantak Datta Gupta and Mark Coates (McGill), and Stephane Blouin (DRDC)
Distributed Particle Filters: Stability Results and Graph-based Compression of Weighted Particle Clouds Michael Rabbat Joint with: Syamantak Datta Gupta and Mark Coates (McGill), and Stephane Blouin (DRDC)
Collaborative Target Detection in Wireless Sensor Networks with Reactive Mobility
 1 / 24 Collaborative Target Detection in Wireless Sensor Networks with Reactive Mobility Rui Tan 1 Guoliang Xing 1 Jianping Wang 1 Hing Cheung So 2 1 Department of Computer Science City University of Hong
1 / 24 Collaborative Target Detection in Wireless Sensor Networks with Reactive Mobility Rui Tan 1 Guoliang Xing 1 Jianping Wang 1 Hing Cheung So 2 1 Department of Computer Science City University of Hong
Accuracy and Decision Time for Decentralized Implementations of the Sequential Probability Ratio Test
 21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 ThA1.3 Accuracy Decision Time for Decentralized Implementations of the Sequential Probability Ratio Test Sra Hala
21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 ThA1.3 Accuracy Decision Time for Decentralized Implementations of the Sequential Probability Ratio Test Sra Hala
Energy-Efficient Noncoherent Signal Detection for Networked Sensors Using Ordered Transmissions
 Energy-Efficient Noncoherent Signal Detection for Networked Sensors Using Ordered Transmissions Ziad N. Rawas, Student Member, IEEE, Qian He, Member, IEEE, and Rick S. Blum, Fellow, IEEE Abstract Energy
Energy-Efficient Noncoherent Signal Detection for Networked Sensors Using Ordered Transmissions Ziad N. Rawas, Student Member, IEEE, Qian He, Member, IEEE, and Rick S. Blum, Fellow, IEEE Abstract Energy
ABSTRACT INTRODUCTION
 ABSTRACT Presented in this paper is an approach to fault diagnosis based on a unifying review of linear Gaussian models. The unifying review draws together different algorithms such as PCA, factor analysis,
ABSTRACT Presented in this paper is an approach to fault diagnosis based on a unifying review of linear Gaussian models. The unifying review draws together different algorithms such as PCA, factor analysis,
Lecture Outline. Target Tracking: Lecture 3 Maneuvering Target Tracking Issues. Maneuver Illustration. Maneuver Illustration. Maneuver Detection
 REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
Random Access Protocols ALOHA
 Random Access Protocols ALOHA 1 ALOHA Invented by N. Abramson in 1970-Pure ALOHA Uncontrolled users (no coordination among users) Same packet (frame) size Instant feedback Large (~ infinite) population
Random Access Protocols ALOHA 1 ALOHA Invented by N. Abramson in 1970-Pure ALOHA Uncontrolled users (no coordination among users) Same packet (frame) size Instant feedback Large (~ infinite) population
How to Deal with Multiple-Targets in Speaker Identification Systems?
 How to Deal with Multiple-Targets in Speaker Identification Systems? Yaniv Zigel and Moshe Wasserblat ICE Systems Ltd., Audio Analysis Group, P.O.B. 690 Ra anana 4307, Israel yanivz@nice.com Abstract In
How to Deal with Multiple-Targets in Speaker Identification Systems? Yaniv Zigel and Moshe Wasserblat ICE Systems Ltd., Audio Analysis Group, P.O.B. 690 Ra anana 4307, Israel yanivz@nice.com Abstract In
Clustering and Gaussian Mixture Models
 Clustering and Gaussian Mixture Models Piyush Rai IIT Kanpur Probabilistic Machine Learning (CS772A) Jan 25, 2016 Probabilistic Machine Learning (CS772A) Clustering and Gaussian Mixture Models 1 Recap
Clustering and Gaussian Mixture Models Piyush Rai IIT Kanpur Probabilistic Machine Learning (CS772A) Jan 25, 2016 Probabilistic Machine Learning (CS772A) Clustering and Gaussian Mixture Models 1 Recap
Introduction to Detection Theory
 Introduction to Detection Theory Detection Theory (a.k.a. decision theory or hypothesis testing) is concerned with situations where we need to make a decision on whether an event (out of M possible events)
Introduction to Detection Theory Detection Theory (a.k.a. decision theory or hypothesis testing) is concerned with situations where we need to make a decision on whether an event (out of M possible events)
Lecture 3: Pattern Classification
 EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
9/12/17. Types of learning. Modeling data. Supervised learning: Classification. Supervised learning: Regression. Unsupervised learning: Clustering
 Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Mixtures of Gaussians continued
 Mixtures of Gaussians continued Machine Learning CSE446 Carlos Guestrin University of Washington May 17, 2013 1 One) bad case for k-means n Clusters may overlap n Some clusters may be wider than others
Mixtures of Gaussians continued Machine Learning CSE446 Carlos Guestrin University of Washington May 17, 2013 1 One) bad case for k-means n Clusters may overlap n Some clusters may be wider than others
Distributed Constrained Recursive Nonlinear Least-Squares Estimation: Algorithms and Asymptotics
 1 Distributed Constrained Recursive Nonlinear Least-Squares Estimation: Algorithms and Asymptotics Anit Kumar Sahu, Student Member, IEEE, Soummya Kar, Member, IEEE, José M. F. Moura, Fellow, IEEE and H.
1 Distributed Constrained Recursive Nonlinear Least-Squares Estimation: Algorithms and Asymptotics Anit Kumar Sahu, Student Member, IEEE, Soummya Kar, Member, IEEE, José M. F. Moura, Fellow, IEEE and H.
Clustering K-means. Clustering images. Machine Learning CSE546 Carlos Guestrin University of Washington. November 4, 2014.
 Clustering K-means Machine Learning CSE546 Carlos Guestrin University of Washington November 4, 2014 1 Clustering images Set of Images [Goldberger et al.] 2 1 K-means Randomly initialize k centers µ (0)
Clustering K-means Machine Learning CSE546 Carlos Guestrin University of Washington November 4, 2014 1 Clustering images Set of Images [Goldberger et al.] 2 1 K-means Randomly initialize k centers µ (0)
Lecture 8: Signal Detection and Noise Assumption
 ECE 830 Fall 0 Statistical Signal Processing instructor: R. Nowak Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(0, σ I n n and S = [s, s,..., s n ] T
ECE 830 Fall 0 Statistical Signal Processing instructor: R. Nowak Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(0, σ I n n and S = [s, s,..., s n ] T
Detection Performance and Energy Efficiency of Sequential Detection in a Sensor Network
 Detection Performance and Energy Efficiency of Sequential Detection in a Sensor Network Lige Yu, Student Member, IEEE and Anthony Ephremides, Fellow, IEEE Department of Electrical and Computer Engineering
Detection Performance and Energy Efficiency of Sequential Detection in a Sensor Network Lige Yu, Student Member, IEEE and Anthony Ephremides, Fellow, IEEE Department of Electrical and Computer Engineering