COMM 602: Digital Signal Processing. Lecture 8. Digital Filter Design
|
|
|
- Dwain Brown
- 5 years ago
- Views:
Transcription
1 COMM 60: Digital Signal Proeing Leture 8 Digital Filter Deign

2 Remember: Filter Type

3 Filter Band

4 Pratial Filter peifiation
5 Pratial Filter peifiation H ellipti H

6 Pratial Filter peifiation p p
7 IIR Filter M M
8 IIR Filter Deign Deign mean alulation of the oeffiient of the differene equation or the tranfer funtion. We ue Analog filter deign and then we onvert the deign into digital domain beaue: Analog filter deign i a well developed field and highly advaned. Analog filter deign uually give loed form olution. Extenive table are available for analog filter deign.

9 IIR Filter Deign Method of IIR Filter Deign: - Impule invariant - Step invariant - Bilinear tranformation.
10 Impule Invariant Method Step of Deign:
11 Example: Convert the following analog filter ytem funtion into a digital IIR filter by mean of the impule invariane method: H a h a t H a 3e 0. 5t a 0.5nT n t 3e a h 3 tnt where 3 a H e 0.5T n n n Zh a nt hn 3a n0 n0 3 a
12 Example (Contd. H 0. It i lear that ha a pole at 5 a 3 b 0, a y(n But H ha a pole at a e 0.5T
13 Example: Convert the following analog filter ytem funtion into a digital IIR filter by mean of the impule invariane method:
14 Charateriti of Analog Filter Butterworth Filter: All pole filter (no ero, with no ripple in both the paband and top band. The normalied Butterworth tranfer funtion are: Filter Order Tranfer Funtion 3 3 : ( Every Cut off of i frequeny the ana log divided by filter for LPF
15 Example: Uing the impule invariant method deign a LP digital filter atifying the following requirement: The analog angular ut off frequeny i 000 (rad/e, Sampling rate=000 H, t order Butterworth filter. Solution H a h a ( ( t / e t h a ( nt 000 e h( n 000 e (000 nt n / H( 000 /( a 000 a 000 e n (000 n/ 000 where a e /
16 Example: Uing the impule invariant method deign a LP digital filter atifying the following requirement: The digital ut off angular frequeny i 0. (rad/e, Sampling rate=500 H, nd order Butterworth filter. Solution / in / in ( / ( / ( / ( / ( / / ( / (00 / ( t e t e t h H t t a a F
17 n e n h F T ubtitute nt e n h n nt in ( / in ( 0. / ( o in(0. 00 ( o in( ( o in( in( ( ( e e e H e a e a e H Then a a an and e X e n x Sine a a a tranform Z a tranform Z an
18 Step Invariant Method Step of Deign: ( Find H( of the analog filter. u( t ( (3 Find tep repone Find a(nt by a(t ampling H ( (3 Find H(Z a( nt (4 Realiation
19 Example: T T nt t e e H nt u e nt a t u e t a Then / ( / ( ( H a(t ( H( H( ( ( 5 5 ( ( ( 5 5 ( ( ( ( 5 Solution filter onvert it to digital 5 T.F: Given the analog

20 Bilinear Tranformation See Text book For the derivation Of thi equation tan T Page 74
21 Bilinear Tranformation Derivation of: (
22


23 Frequeny Warping Effet tan T
24 Propertie of Bilinear Tranformation Let T. Putting σ j in equation (, we may repreent a : r e and arg( jθ tan where the radiu and angle are defined ( tan ( σ r ( σ for 0 From ( and (3 we have : r for 0 r for 0 r for 0 tan / by : ( (3
25 Propertie of Bilinear Tranformation Aordingly, we may tate the propertie of bilinear tranformation: ( The left-half -plane i mapped onto the interior of the unit irle in the -plane. ( The entire j axi of the -plane i mapped onto one omplete revolution of the unit irle in the -plane (3 The right-half of the -plane i mapped onto the exterior of the unit irle in the -plane. Then if the analog filter i table and aual, the reulting digital filter i alo aual and table.
26 BILINEAR Z TRANSFORMATION (Contd. S-Plane Z-Plane = - Unit Cirle = LHS J-axi RHS

27 Step of Bilinear Tranformation H( tan T H(
28 Example: H( tan T For T=
29 H H(
30 H xn yn
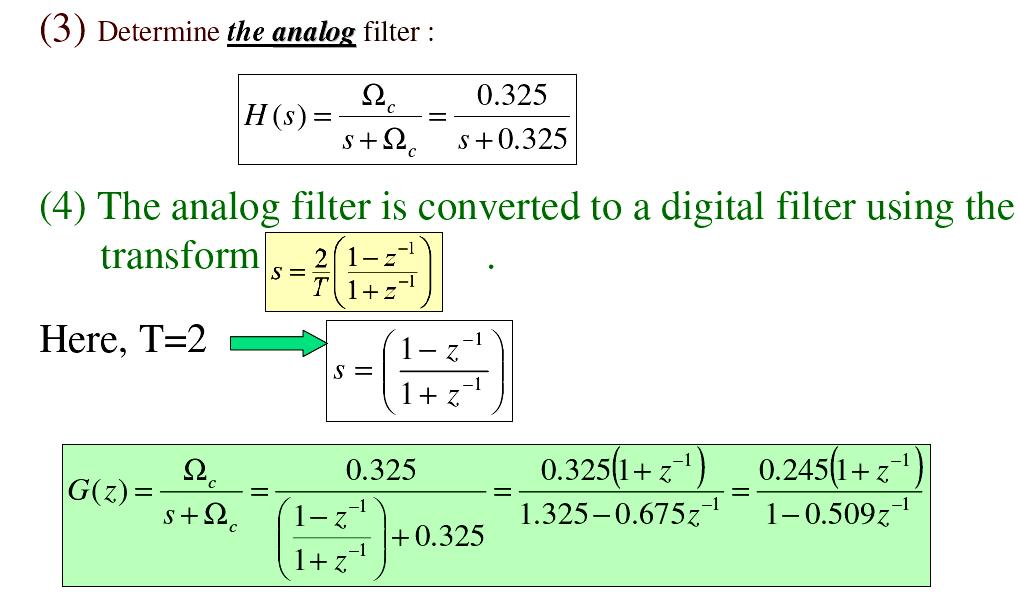
31 Example: H T T H T H Convert the following analog filter ytem funtion into a digital IIR filter by mean of the bilinear tranformation method: Solution
32 Example (Contd T H T H T T H T T T H
33 Example (Contd. For T= H 3 T T 0.5 T T T 0.5 T H 0.333
34 Butterworth Filter Order A A For H j and H j, the analog filter order N i determined by the equation: A log A N log A A
35 Tranformation of LPF to Other Filter 0 ˆ 0 u l ˆ 0 ˆ u l
36 Example: Ue the bilinear Tranformation method to: T= tan T =0.55
37 Example (ont.:
38 Example: Deign a 3 rd order Butterworth LPF to have a utoff frequeny of.53 rad/e uing bilinear tranformation. olution T=
39
40
41 Example: Uing bilinear tranformation, deign IIR filter that atifie thee peifiation: LPF with maximum ripple allowed in the paband =0.93, the maximum ripple allowed in the topband =0., paband edge frequeny= 0.5*pi, and topband edge frequeny=0.5*pi. The pre-warped analog frequenie are: olution p p 0.5 tan tan tan tan ( rad ( rad The required amplitude are: A A p p A A p p
42 Example: The required order i: p p A A N log log log log N The utoff frequeny i the frequeny at whih the amplitude i Let N =. p N p A A p p
43 Example:
44 Example:
45 Example:
46
47 Example:

48 Remember: -3 db Cut-off frequeny
Design of Digital Filters
 Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Lecture #9 Continuous time filter
 Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture 10 Filtering: Applied Concepts
 Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
Digital Signal Processing
 Digital Signal Proceing IIR Filter Deign Manar Mohaien Office: F8 Email: manar.ubhi@kut.ac.kr School of IT Engineering Review of the Precedent Lecture Propertie of FIR Filter Application of FIR Filter
Digital Signal Proceing IIR Filter Deign Manar Mohaien Office: F8 Email: manar.ubhi@kut.ac.kr School of IT Engineering Review of the Precedent Lecture Propertie of FIR Filter Application of FIR Filter
Chapter 6 Control Systems Design by Root-Locus Method. Lag-Lead Compensation. Lag lead Compensation Techniques Based on the Root-Locus Approach.
 hapter 6 ontrol Sytem Deign by Root-Lou Method Lag-Lead ompenation Lag lead ompenation ehnique Baed on the Root-Lou Approah. γ β K, ( γ >, β > ) In deigning lag lead ompenator, we onider two ae where γ
hapter 6 ontrol Sytem Deign by Root-Lou Method Lag-Lead ompenation Lag lead ompenation ehnique Baed on the Root-Lou Approah. γ β K, ( γ >, β > ) In deigning lag lead ompenator, we onider two ae where γ
MAHALAKSHMI ENGINEERING COLLEGE-TRICHY
 DIGITAL SIGNAL PROCESSING DEPT./SEM.: CSE /VII DIGITAL FILTER DESIGN-IIR & FIR FILTER DESIGN PART-A. Lit the different type of tructure for realiation of IIR ytem? AUC APR 09 The different type of tructure
DIGITAL SIGNAL PROCESSING DEPT./SEM.: CSE /VII DIGITAL FILTER DESIGN-IIR & FIR FILTER DESIGN PART-A. Lit the different type of tructure for realiation of IIR ytem? AUC APR 09 The different type of tructure
5.5 Application of Frequency Response: Signal Filters
 44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
Design By Emulation (Indirect Method)
") Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
ME 375 FINAL EXAM Wednesday, May 6, 2009
 ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
Chapter 7: IIR Filter Design Techniques
 IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
Designing of Analog Filters.
 Deigning of Analog Filter. Aliaing and recontruction filter are analog filter, therefore we need to undertand the deign of analog filter firt before going into the deign of digital filter. Further the
Deigning of Analog Filter. Aliaing and recontruction filter are analog filter, therefore we need to undertand the deign of analog filter firt before going into the deign of digital filter. Further the
Digital Control System
 Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Lag-Lead Compensator Design
 Lag-Lead Compenator Deign ELEC 3 Spring 08 Lag or Lead Struture A bai ompenator onit of a gain, one real pole and one real zero Two type: phae-lead and phae-lag Phae-lead: provide poitive phae hift and
Lag-Lead Compenator Deign ELEC 3 Spring 08 Lag or Lead Struture A bai ompenator onit of a gain, one real pole and one real zero Two type: phae-lead and phae-lag Phae-lead: provide poitive phae hift and
Properties of Z-transform Transform 1 Linearity a
 Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
Spring 2014 EE 445S Real-Time Digital Signal Processing Laboratory. Homework #0 Solutions on Review of Signals and Systems Material
 Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Part A: Signal Processing. Professor E. Ambikairajah UNSW, Australia
 Part A: Signal Proceing Chapter 5: Digital Filter Deign 5. Chooing between FIR and IIR filter 5. Deign Technique 5.3 IIR filter Deign 5.3. Impule Invariant Method 5.3. Bilinear Tranformation 5.3.3 Digital
Part A: Signal Proceing Chapter 5: Digital Filter Deign 5. Chooing between FIR and IIR filter 5. Deign Technique 5.3 IIR filter Deign 5.3. Impule Invariant Method 5.3. Bilinear Tranformation 5.3.3 Digital
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 8 - IIR Filters (II)
") Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 27 Lecture 8 Outline Introduction Digital
Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 27 Lecture 8 Outline Introduction Digital
Computer Engineering 4TL4: Digital Signal Processing (Fall 2003) Solutions to Final Exam
 Solutions to Final Exam") Computer Engineering TL: Digital Signal Proessing (Fall 3) Solutions to Final Exam The step response ynof a ausal, stable LTI system is: n [ ] = [ yn ] un, [ ] where un [ ] is the unit step funtion a Find
Computer Engineering TL: Digital Signal Proessing (Fall 3) Solutions to Final Exam The step response ynof a ausal, stable LTI system is: n [ ] = [ yn ] un, [ ] where un [ ] is the unit step funtion a Find
Digital Control System
 Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
Chapter 2: Problem Solutions
 Chapter 2: Solution Dicrete Time Proceing of Continuou Time Signal Sampling à 2.. : Conider a inuoidal ignal and let u ample it at a frequency F 2kHz. xt 3co000t 0. a) Determine and expreion for the ampled
Chapter 2: Solution Dicrete Time Proceing of Continuou Time Signal Sampling à 2.. : Conider a inuoidal ignal and let u ample it at a frequency F 2kHz. xt 3co000t 0. a) Determine and expreion for the ampled
( ) 2. 1) Bode plots/transfer functions. a. Draw magnitude and phase bode plots for the transfer function
 2. 1) Bode plots/transfer functions. a. Draw magnitude and phase bode plots for the transfer function") ECSE CP7 olution Spring 5 ) Bode plot/tranfer function a. Draw magnitude and phae bode plot for the tranfer function H( ). ( ) ( E4) In your magnitude plot, indicate correction at the pole and zero. Step
ECSE CP7 olution Spring 5 ) Bode plot/tranfer function a. Draw magnitude and phae bode plot for the tranfer function H( ). ( ) ( E4) In your magnitude plot, indicate correction at the pole and zero. Step
Chapter 7. Root Locus Analysis
 Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
Lecture 8 - IIR Filters (II)
") Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 24 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 29 Lecture 8 Outline Introduction Digital
Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 24 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 29 Lecture 8 Outline Introduction Digital
Chapter 7: Filter Design 7.1 Practical Filter Terminology
 hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
Compensation Techniques
 D Compenation ehnique Performane peifiation for the loed-loop ytem Stability ranient repone Æ, M (ettling time, overhoot) or phae and gain margin Steady-tate repone Æ e (teady tate error) rial and error
D Compenation ehnique Performane peifiation for the loed-loop ytem Stability ranient repone Æ, M (ettling time, overhoot) or phae and gain margin Steady-tate repone Æ e (teady tate error) rial and error
PID CONTROL. Presentation kindly provided by Dr Andy Clegg. Advanced Control Technology Consortium (ACTC)
") PID CONTROL Preentation kindly provided by Dr Andy Clegg Advaned Control Tehnology Conortium (ACTC) Preentation Overview Introdution PID parameteriation and truture Effet of PID term Proportional, Integral
PID CONTROL Preentation kindly provided by Dr Andy Clegg Advaned Control Tehnology Conortium (ACTC) Preentation Overview Introdution PID parameteriation and truture Effet of PID term Proportional, Integral
Simple FIR Digital Filters. Simple FIR Digital Filters. Simple Digital Filters. Simple FIR Digital Filters. Simple FIR Digital Filters
 Simple Digital Filters Later in the ourse we shall review various methods of designing frequeny-seletive filters satisfying presribed speifiations We now desribe several low-order FIR and IIR digital filters
Simple Digital Filters Later in the ourse we shall review various methods of designing frequeny-seletive filters satisfying presribed speifiations We now desribe several low-order FIR and IIR digital filters
EE 521: Instrumentation and Measurements
 Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
2. SYNTHESIS OF ANALOG FILTERS
 ,. SYNTHESIS OF ANALO FILTERS 9. a) H BW ( j ) = -------------------------------- where ε =.A max ε N A max = log Hj ( ) = ( ) ε log( ) A min = log Hj ( ) = ( ) ε log N N.A min ----- ε = -------------------------------
,. SYNTHESIS OF ANALO FILTERS 9. a) H BW ( j ) = -------------------------------- where ε =.A max ε N A max = log Hj ( ) = ( ) ε log( ) A min = log Hj ( ) = ( ) ε log N N.A min ----- ε = -------------------------------
THE SOLAR SYSTEM. We begin with an inertial system and locate the planet and the sun with respect to it. Then. F m. Then
 THE SOLAR SYSTEM We now want to apply what we have learned to the olar ytem. Hitorially thi wa the great teting ground for mehani and provided ome of it greatet triumph, uh a the diovery of the outer planet.
THE SOLAR SYSTEM We now want to apply what we have learned to the olar ytem. Hitorially thi wa the great teting ground for mehani and provided ome of it greatet triumph, uh a the diovery of the outer planet.
Today. ESE 531: Digital Signal Processing. IIR Filter Design. Impulse Invariance. Impulse Invariance. Impulse Invariance. ω < π.
 Today ESE 53: Digital Signal Processing! IIR Filter Design " Lec 8: March 30, 207 IIR Filters and Adaptive Filters " Bilinear Transformation! Transformation of DT Filters! Adaptive Filters! LMS Algorithm
Today ESE 53: Digital Signal Processing! IIR Filter Design " Lec 8: March 30, 207 IIR Filters and Adaptive Filters " Bilinear Transformation! Transformation of DT Filters! Adaptive Filters! LMS Algorithm
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. R 4 := 100 kohm
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
DIGITAL SIGNAL PROCESSING. Chapter 6 IIR Filter Design
 DIGITAL SIGNAL PROCESSING Chapter 6 IIR Filter Design OER Digital Signal Processing by Dr. Norizam Sulaiman work is under licensed Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International
DIGITAL SIGNAL PROCESSING Chapter 6 IIR Filter Design OER Digital Signal Processing by Dr. Norizam Sulaiman work is under licensed Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. Solutions to Assignment 3 February 2005.
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
ME 375 EXAM #1 Tuesday February 21, 2006
 ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
CHAPTER 4 DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL
 98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
UVa Course on Physics of Particle Accelerators
 UVa Coure on Phyi of Partile Aelerator B. Norum Univerity of Virginia G. A. Krafft Jefferon Lab 3/7/6 Leture x dx d () () Peudoharmoni Solution = give β β β () ( o µ + α in µ ) β () () β x dx ( + α() α
UVa Coure on Phyi of Partile Aelerator B. Norum Univerity of Virginia G. A. Krafft Jefferon Lab 3/7/6 Leture x dx d () () Peudoharmoni Solution = give β β β () ( o µ + α in µ ) β () () β x dx ( + α() α
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 LINEAR CONTROL SYSTEMS Ali Karimour Aoiate Profeor Ferdowi Univerity of Mahhad Leture 0 Leture 0 Frequeny domain hart Toi to be overed inlude: Relative tability meaure for minimum hae ytem. ain margin.
LINEAR CONTROL SYSTEMS Ali Karimour Aoiate Profeor Ferdowi Univerity of Mahhad Leture 0 Leture 0 Frequeny domain hart Toi to be overed inlude: Relative tability meaure for minimum hae ytem. ain margin.
Solutions. Digital Control Systems ( ) 120 minutes examination time + 15 minutes reading time at the beginning of the exam
 120 minutes examination time + 15 minutes reading time at the beginning of the exam") BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
ECE 3510 Root Locus Design Examples. PI To eliminate steady-state error (for constant inputs) & perfect rejection of constant disturbances
 & perfect rejection of constant disturbances") ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
Chapter 4: Applications of Fourier Representations. Chih-Wei Liu
 Chapter 4: Application of Fourier Repreentation Chih-Wei Liu Outline Introduction Fourier ranform of Periodic Signal Convolution/Multiplication with Non-Periodic Signal Fourier ranform of Dicrete-ime Signal
Chapter 4: Application of Fourier Repreentation Chih-Wei Liu Outline Introduction Fourier ranform of Periodic Signal Convolution/Multiplication with Non-Periodic Signal Fourier ranform of Dicrete-ime Signal
Question 1 Equivalent Circuits
 MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
Chapter 4. Simulations. 4.1 Introduction
 Chapter 4 Simulation 4.1 Introdution In the previou hapter, a methodology ha been developed that will be ued to perform the ontrol needed for atuator haraterization. A tudy uing thi methodology allowed
Chapter 4 Simulation 4.1 Introdution In the previou hapter, a methodology ha been developed that will be ued to perform the ontrol needed for atuator haraterization. A tudy uing thi methodology allowed
PS403 - Digital Signal processing
 PS403 - Digital Signal processing 6. DSP - Recursive (IIR) Digital Filters Key Text: Digital Signal Processing with Computer Applications (2 nd Ed.) Paul A Lynn and Wolfgang Fuerst, (Publisher: John Wiley
PS403 - Digital Signal processing 6. DSP - Recursive (IIR) Digital Filters Key Text: Digital Signal Processing with Computer Applications (2 nd Ed.) Paul A Lynn and Wolfgang Fuerst, (Publisher: John Wiley
Digital Filter Specifications. Digital Filter Specifications. Digital Filter Design. Digital Filter Specifications. Digital Filter Specifications
 Digital Filter Deign Objetive - Determinatin f a realiable tranfer funtin G() arximating a given frequeny rene eifiatin i an imrtant te in the develment f a digital filter If an IIR filter i deired, G()
Digital Filter Deign Objetive - Determinatin f a realiable tranfer funtin G() arximating a given frequeny rene eifiatin i an imrtant te in the develment f a digital filter If an IIR filter i deired, G()
HOMEWORK ASSIGNMENT #2
 Texa A&M Univerity Electrical Engineering Department ELEN Integrated Active Filter Deign Methodologie Alberto Valde-Garcia TAMU ID# 000 17 September 0, 001 HOMEWORK ASSIGNMENT # PROBLEM 1 Obtain at leat
Texa A&M Univerity Electrical Engineering Department ELEN Integrated Active Filter Deign Methodologie Alberto Valde-Garcia TAMU ID# 000 17 September 0, 001 HOMEWORK ASSIGNMENT # PROBLEM 1 Obtain at leat
MODERN CONTROL SYSTEMS
 MODERN CONTROL SYSTEMS Lecture 1 Root Locu Emam Fathy Department of Electrical and Control Engineering email: emfmz@aat.edu http://www.aat.edu/cv.php?dip_unit=346&er=68525 1 Introduction What i root locu?
MODERN CONTROL SYSTEMS Lecture 1 Root Locu Emam Fathy Department of Electrical and Control Engineering email: emfmz@aat.edu http://www.aat.edu/cv.php?dip_unit=346&er=68525 1 Introduction What i root locu?
Digital Signal Processing Lecture 8 - Filter Design - IIR
 Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Lecture 5 Frequency Response of FIR Systems (III)
") EE3054 Signal and Sytem Lecture 5 Frequency Repone of FIR Sytem (III Yao Wang Polytechnic Univerity Mot of the lide included are extracted from lecture preentation prepared by McClellan and Schafer Licene
EE3054 Signal and Sytem Lecture 5 Frequency Repone of FIR Sytem (III Yao Wang Polytechnic Univerity Mot of the lide included are extracted from lecture preentation prepared by McClellan and Schafer Licene
FINITE WORD LENGTH EFFECTS IN DSP
 FINITE WORD LENGTH EFFECTS IN DSP PREPARED BY GUIDED BY Snehal Gor Dr. Srianth T. ABSTRACT We now that omputers store numbers not with infinite preision but rather in some approximation that an be paed
FINITE WORD LENGTH EFFECTS IN DSP PREPARED BY GUIDED BY Snehal Gor Dr. Srianth T. ABSTRACT We now that omputers store numbers not with infinite preision but rather in some approximation that an be paed
Lecture 4. Chapter 11 Nise. Controller Design via Frequency Response. G. Hovland 2004
 METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
Massachusetts Institute of Technology Dynamics and Control II
 I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
V. IIR Digital Filters
 Digital Signal Processing 5 March 5, V. IIR Digital Filters (Deleted in 7 Syllabus). (dded in 7 Syllabus). 7 Syllabus: nalog filter approximations Butterworth and Chebyshev, Design of IIR digital filters
Digital Signal Processing 5 March 5, V. IIR Digital Filters (Deleted in 7 Syllabus). (dded in 7 Syllabus). 7 Syllabus: nalog filter approximations Butterworth and Chebyshev, Design of IIR digital filters
A Simple Approach to Synthesizing Naïve Quantized Control for Reference Tracking
 A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
ME 375 FINAL EXAM SOLUTIONS Friday December 17, 2004
 ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
Roadmap for Discrete-Time Signal Processing
 EE 4G Note: Chapter 8 Continuou-time Signal co(πf Roadmap for Dicrete-ime Signal Proceing.5 -.5 -..4.6.8..4.6.8 Dicrete-time Signal (Section 8.).5 -.5 -..4.6.8..4.6.8 Sampling Period econd (or ampling
EE 4G Note: Chapter 8 Continuou-time Signal co(πf Roadmap for Dicrete-ime Signal Proceing.5 -.5 -..4.6.8..4.6.8 Dicrete-time Signal (Section 8.).5 -.5 -..4.6.8..4.6.8 Sampling Period econd (or ampling
Sampling and the Discrete Fourier Transform
 Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Exercises for lectures 20 Digital Control
 Exercie for lecture 0 Digital Control Micael Šebek Automatic control 06-4- Sampling: and z relationip for complex pole Continuou ignal Laplace tranform wit pole Dicrete ignal z-tranform, t y( t) e in t,
Exercie for lecture 0 Digital Control Micael Šebek Automatic control 06-4- Sampling: and z relationip for complex pole Continuou ignal Laplace tranform wit pole Dicrete ignal z-tranform, t y( t) e in t,
EE Control Systems LECTURE 6
 Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #24 Tuesday, November 4, 2003 6.8 IIR Filter Design Properties of IIR Filters: IIR filters may be unstable Causal IIR filters with rational system
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #24 Tuesday, November 4, 2003 6.8 IIR Filter Design Properties of IIR Filters: IIR filters may be unstable Causal IIR filters with rational system
Digital Signal Processing IIR Filter Design via Bilinear Transform
 Digital Signal Processing IIR Filter Design via Bilinear Transform D. Richard Brown III D. Richard Brown III 1 / 12 Basic Procedure We assume here that we ve already decided to use an IIR filter. The basic
Digital Signal Processing IIR Filter Design via Bilinear Transform D. Richard Brown III D. Richard Brown III 1 / 12 Basic Procedure We assume here that we ve already decided to use an IIR filter. The basic
Chapter 13. Root Locus Introduction
 Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Digital Control & Digital Filters. Lectures 21 & 22
 Digital Controls & Digital Filters Lectures 2 & 22, Professor Department of Electrical and Computer Engineering Colorado State University Spring 205 Review of Analog Filters-Cont. Types of Analog Filters:
Digital Controls & Digital Filters Lectures 2 & 22, Professor Department of Electrical and Computer Engineering Colorado State University Spring 205 Review of Analog Filters-Cont. Types of Analog Filters:
NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE
... MATRICULATION NUMBER... SIGNATURE") POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
EE 508 Lecture 16. Filter Transformations. Lowpass to Bandpass Lowpass to Highpass Lowpass to Band-reject
 EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
Analysis of Step Response, Impulse and Ramp Response in the Continuous Stirred Tank Reactor System
 ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
6.447 rad/sec and ln (% OS /100) tan Thus pc. the testing point is s 3.33 j5.519
 tan Thus pc. the testing point is s 3.33 j5.519") 9. a. 3.33, n T ln(% OS /100) 2 2 ln (% OS /100) 0.517. Thu n 6.7 rad/ec and the teting point i 3.33 j5.519. b. Summation of angle including the compenating zero i -106.691, The compenator pole mut contribute
9. a. 3.33, n T ln(% OS /100) 2 2 ln (% OS /100) 0.517. Thu n 6.7 rad/ec and the teting point i 3.33 j5.519. b. Summation of angle including the compenating zero i -106.691, The compenator pole mut contribute
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. I Reading:
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. I Reading:
CONTROL SYSTEMS. Chapter 2 : Block Diagram & Signal Flow Graphs GATE Objective & Numerical Type Questions
 ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ELEG 5173L Digital Signal Processing Ch. 5 Digital Filters
 Department of Electrical Engineering University of Aransas ELEG 573L Digital Signal Processing Ch. 5 Digital Filters Dr. Jingxian Wu wuj@uar.edu OUTLINE 2 FIR and IIR Filters Filter Structures Analog Filters
Department of Electrical Engineering University of Aransas ELEG 573L Digital Signal Processing Ch. 5 Digital Filters Dr. Jingxian Wu wuj@uar.edu OUTLINE 2 FIR and IIR Filters Filter Structures Analog Filters
is the cut off frequency in rads.
 0 ELETRIAL IRUITS 9. HIGH RDER ATIVE FILTERS (With Tle) Introdution Thi development explin how to deign Butterworth (Mximlly Flt) or heyhev (Equl Ripple) Low P, High P or Bnd P tive filter. Thi tretment
0 ELETRIAL IRUITS 9. HIGH RDER ATIVE FILTERS (With Tle) Introdution Thi development explin how to deign Butterworth (Mximlly Flt) or heyhev (Equl Ripple) Low P, High P or Bnd P tive filter. Thi tretment
( 1) EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms
 EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms") EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
EE 508 Lecture 16. Filter Transformations. Lowpass to Bandpass Lowpass to Highpass Lowpass to Band-reject
 EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Flat Paband/Stopband Filter T j T j Lowpa Bandpa T j T j Highpa Bandreject Review from Lat
EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Flat Paband/Stopband Filter T j T j Lowpa Bandpa T j T j Highpa Bandreject Review from Lat
Chapter 4 Interconnection of LTI Systems
 Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
Sidelobe-Suppression Technique Applied To Binary Phase Barker Codes
 Journal of Engineering and Development, Vol. 16, No.4, De. 01 ISSN 1813-78 Sidelobe-Suppreion Tehnique Applied To Binary Phae Barker Code Aitant Profeor Dr. Imail M. Jaber Al-Mutaniriya Univerity College
Journal of Engineering and Development, Vol. 16, No.4, De. 01 ISSN 1813-78 Sidelobe-Suppreion Tehnique Applied To Binary Phae Barker Code Aitant Profeor Dr. Imail M. Jaber Al-Mutaniriya Univerity College
Linear System Fundamentals
 Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
Correction for Simple System Example and Notes on Laplace Transforms / Deviation Variables ECHE 550 Fall 2002
 Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Filter Analysis and Design
 Filter Analysis and Design Butterworth Filters Butterworth filters have a transfer function whose squared magnitude has the form H a ( jω ) 2 = 1 ( ) 2n. 1+ ω / ω c * M. J. Roberts - All Rights Reserved
Filter Analysis and Design Butterworth Filters Butterworth filters have a transfer function whose squared magnitude has the form H a ( jω ) 2 = 1 ( ) 2n. 1+ ω / ω c * M. J. Roberts - All Rights Reserved
Lecture 9 Infinite Impulse Response Filters
 Lecture 9 Infinite Impulse Response Filters Outline 9 Infinite Impulse Response Filters 9 First-Order Low-Pass Filter 93 IIR Filter Design 5 93 CT Butterworth filter design 5 93 Bilinear transform 7 9
Lecture 9 Infinite Impulse Response Filters Outline 9 Infinite Impulse Response Filters 9 First-Order Low-Pass Filter 93 IIR Filter Design 5 93 CT Butterworth filter design 5 93 Bilinear transform 7 9
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
LTV System Modelling
 Helinki Univerit of Technolog S-72.333 Potgraduate Coure in Radiocommunication Fall 2000 LTV Stem Modelling Heikki Lorentz Sonera Entrum O heikki.lorentz@onera.fi Januar 23 rd 200 Content. Introduction
Helinki Univerit of Technolog S-72.333 Potgraduate Coure in Radiocommunication Fall 2000 LTV Stem Modelling Heikki Lorentz Sonera Entrum O heikki.lorentz@onera.fi Januar 23 rd 200 Content. Introduction
EE 508 Lecture 16. Filter Transformations. Lowpass to Bandpass Lowpass to Highpass Lowpass to Band-reject
 EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
CHAPTER 13 FILTERS AND TUNED AMPLIFIERS
 HAPTE FILTES AND TUNED AMPLIFIES hapter Outline. Filter Traniion, Type and Specification. The Filter Tranfer Function. Butterworth and hebyhev Filter. Firt Order and Second Order Filter Function.5 The
HAPTE FILTES AND TUNED AMPLIFIES hapter Outline. Filter Traniion, Type and Specification. The Filter Tranfer Function. Butterworth and hebyhev Filter. Firt Order and Second Order Filter Function.5 The
Lecture 3 - Design of Digital Filters
 Lecture 3 - Design of Digital Filters 3.1 Simple filters In the previous lecture we considered the polynomial fit as a case example of designing a smoothing filter. The approximation to an ideal LPF can
Lecture 3 - Design of Digital Filters 3.1 Simple filters In the previous lecture we considered the polynomial fit as a case example of designing a smoothing filter. The approximation to an ideal LPF can
Lecture 8 - SISO Loop Design
 Lecture 8 - SISO Loop Deign Deign approache, given pec Loophaping: in-band and out-of-band pec Fundamental deign limitation for the loop Gorinevky Control Engineering 8-1 Modern Control Theory Appy reult
Lecture 8 - SISO Loop Deign Deign approache, given pec Loophaping: in-band and out-of-band pec Fundamental deign limitation for the loop Gorinevky Control Engineering 8-1 Modern Control Theory Appy reult
6.003 (Fall 2011) Quiz #3 November 16, 2011
 Quiz #3 November 16, 2011") 6.003 (Fall 2011) Quiz #3 November 16, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 3 1 pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
6.003 (Fall 2011) Quiz #3 November 16, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 3 1 pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
UNIT - III PART A. 2. Mention any two techniques for digitizing the transfer function of an analog filter?
 UNIT - III PART A. Mention the important features of the IIR filters? i) The physically realizable IIR filters does not have linear phase. ii) The IIR filter specification includes the desired characteristics
UNIT - III PART A. Mention the important features of the IIR filters? i) The physically realizable IIR filters does not have linear phase. ii) The IIR filter specification includes the desired characteristics
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
Behavioral thermal modeling for quad-core microprocessors
 Behavioral thermal modeling for quad-core microproceor Duo Li and Sheldon X.-D. Tan Department of Electrical Engineering Univerity of California, Riveride, CA Murli Tirumala Intel Corporation Outline Introduction
Behavioral thermal modeling for quad-core microproceor Duo Li and Sheldon X.-D. Tan Department of Electrical Engineering Univerity of California, Riveride, CA Murli Tirumala Intel Corporation Outline Introduction
Design of IIR filters
 Design of IIR filters Standard methods of design of digital infinite impulse response (IIR) filters usually consist of three steps, namely: 1 design of a continuous-time (CT) prototype low-pass filter;
Design of IIR filters Standard methods of design of digital infinite impulse response (IIR) filters usually consist of three steps, namely: 1 design of a continuous-time (CT) prototype low-pass filter;
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω