Order Reduction of a Distributed Parameter PEM Fuel Cell Model
|
|
|
- Scott Sharp
- 5 years ago
- Views:
Transcription
 Intelligent Energy Limited, (2) Universitat Politècnica de Catalunya BarcelonaTech, (3) IRI (CSIC) 1 / 17")
1 Order Reduction of a Distributed Parameter PEM Fuel Cell Model María Sarmiento Carnevali 1 Carles Batlle Arnau 2 Maria Serra Prat 2,3 Immaculada Massana Hugas 2 (1) Intelligent Energy Limited, (2) Universitat Politècnica de Catalunya BarcelonaTech, (3) IRI (CSIC) 1 / 17 iberconappice2014
2 1 Introduction 2 Description of the system 3 Balanced truncation based model order reduction 4 Model order reduction of the PEMFC 5 Conclusions and outlook 2 / 17 iberconappice2014
3 Introduction Distributed parameter modeling required to accurately consider space variations important regarding the performance and durability of the Proton Exchange Membrane Fuel Cells (PEMFC). Large number of differential algebraic equations (DAE) obtained from discretizing a set of partial differential equations (PDE). Slow numerical simulations and difficulty to design model-based controllers. 3 / 17 iberconappice2014
4 Goal Obtaining an order reduced model, suitable to perform fast numerical simulations and design controllers for the original nonlinear model. How? Applying balanced truncation model order reduction techniques to a large dimension DAE system obtained from a first principles, PDE model of the PEMFC. Both the original full order discretized model and the reduced ones are implemented using in-house MATLAB R code. 4 / 17 iberconappice2014
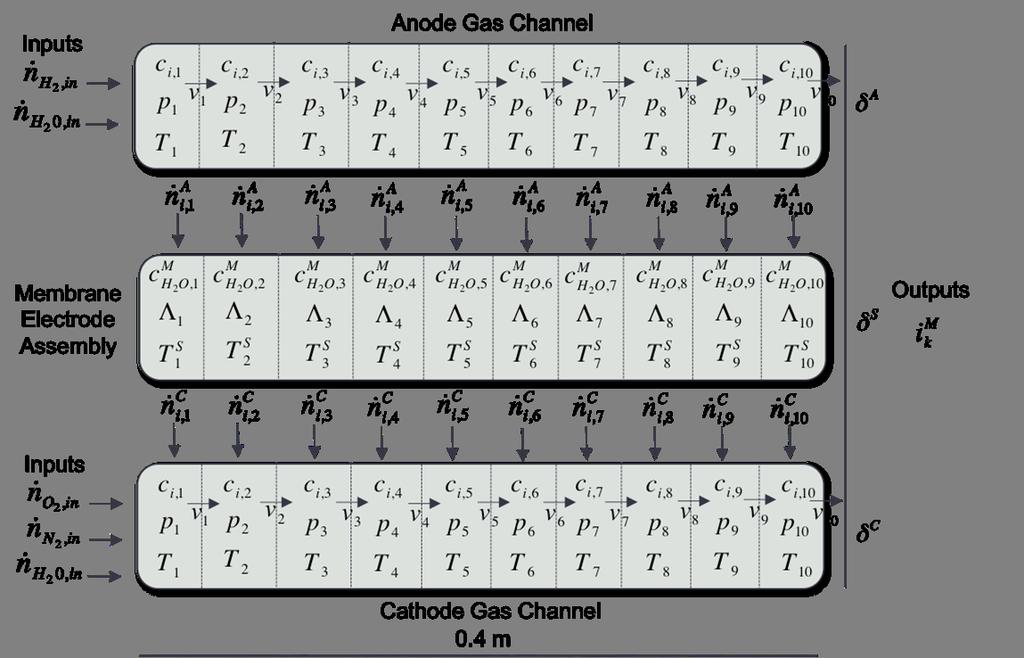
5 Description of the system Single-channel PEM Fuel Cell. 1d + 1 first principles (fluidic+thermal) simplified model for the gas channels, the gas diffusion and catalyst layers and the membrane (M. Sarmiento, M. Serra, C. Batlle, Distributed parameter model simulation tool for PEM fuel cells, International J. of Hydrogen Energy 39, (2014).) Inputs: Inlet flows of hydrogen and water (anode side), air and water (cathode side), inlet flow temperatures and cell voltage. Outputs: Membrane current profile along the channel. 10-segment grid along the channels, 110 states, 300 algebraic equations. 5 / 17 iberconappice2014
6 6 / 17 iberconappice2014
7 Balanced truncation based model order reduction Nonlinear control system (x R N, u R M, y R P, f(0) = 0) ẋ = f(x) + g(x)u, y = h(x). Controllability function L c (x) L c (x) = 1 0 inf u(t) 2 dt, x( ) = 0, x(0) = x. u L 2 ((,0),R M ) 2 Minimum 2-norm of the control to reach x from the origin. Observability function L o (x) L o (x) = y(t) 2 dt = h(x(t)) 2 dt, x(0) = x. 2-norm of the output signal obtained when the system is relaxed from the state x. 7 / 17 iberconappice2014
8 For linear control systems, ẋ = Ax + Bu, y = Cx assumed to be observable, controllable and Hurwitz, both L c (x) and L o (x) are quadratic functions L c (x) = 1 2 xt W 1 c x, L 0 (x) = 1 2 xt W o x, where W c > 0 and W o > 0, the controllability and observability Gramians, are the solutions to the matrix Lyapunov equations AW c + W c A T + BB T = 0, A T W o + W o A + C T C = 0. 8 / 17 iberconappice2014
9 W c provides information about the states that are easy to control (signals u of small norm can be used to reach them). W o allows to find the states that are easily observable (they produce outputs of large norm). One would like to select the states that score well on both counts, and this leads to the concept of balanced realization, for which W c = W o. The balanced realization is given by z = T x, and T can be computed by means of Cholesky factorizations of W c and W o. In the balanced realization, W c = W o = diag(σ 1, σ 2,..., σ N ), where σ 1 > σ 2 > > σ N > 0 are the Hankel singular values of the system. 9 / 17 iberconappice2014
10 The state with only nonzero coordinate z i is both easier to control and easier to observe than the one corresponding to z i+1. Balanced realization model order reduction is performed by keeping only the r first states in the balanced realization. This yields a system of order r with the same inputs and outputs. If G r is the transfer function of the truncated system and G that of the full one, one can show that σ r+1 G G r H 2 N i=r+1 The whole procedure depends on the controls and outputs that have been selected from the beginning. Hence, model order reduction can be tailored to discuss specific variables, by choosing them as outputs. σ i. 10 / 17 iberconappice2014
11 Model order reduction of the PEMFC System linearized around an equilibrium point, corresponding to 1.98A and 0.7V. To perform the reduction, we choose as inputs the 5 inlet flows (H 2 O, N 2 and O 2 in the cathode, and H 2 O and H 2 in the anode), their 2 temperatures and the voltage (8 in total), and the full current density profile as outputs (10). Algebraic constraints are explicitly solved, resulting in a state space of dimension / 17 iberconappice2014
12 Decay of the singular values of the linearized system. From this, one sees that there are some 10 important states from the point of view of the input/output map. Those states are, however, the transformed ones, and hence have no physical interpretation (this is a drawback of the procedure). 12 / 17 iberconappice2014
13 Simulations In order to test the reduced-model behavior, step input-output responses from the original model and reduced models of different orders were simulated and compared. Time responses of important variables to a voltage step change (from 0.7V to 0.8V ) at time 3s are shown. Figures show the comparison of three different order-reduced models with the original nonlinear full order model. The conclusion is that 11 states out of 110 are sufficient to approximate de 110-state nonlinear original model. 13 / 17 iberconappice2014
14 Membrane current density at z = / 17 iberconappice2014
15 One can select different outputs and repeat the process of model reduction. Again, 11 states are good enough to capture the input/output map. O 2 concentration at z = 10. Solid part temperature at z = / 17 iberconappice2014
16 H 2 concentration at z = 3. H 2 O anode water concentration at z = / 17 iberconappice2014
17 Conclusions and outlook Promising results have been found by applying an order reduction technique to a complex distributed parameter model of a PEM Fuel Cell. Balanced truncation model order reduction has been applied to a model obtained by spatial discretization and linearization around a working (equilibrium) point. Results have shown that reducing the order of the spatially discretized distributed parameter model from 110 states down to 11 states gives a very good approximation. An interesting next step is to study the range of operating conditions (around the equilibrium) for which the reduced model is valid. Presently, we are working towards using the reduced models to design model-based controllers. 17 / 17 iberconappice2014
3 Gramians and Balanced Realizations
 3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
Weighted balanced realization and model reduction for nonlinear systems
 Weighted balanced realization and model reduction for nonlinear systems Daisuke Tsubakino and Kenji Fujimoto Abstract In this paper a weighted balanced realization and model reduction for nonlinear systems
Weighted balanced realization and model reduction for nonlinear systems Daisuke Tsubakino and Kenji Fujimoto Abstract In this paper a weighted balanced realization and model reduction for nonlinear systems
The Important State Coordinates of a Nonlinear System
 The Important State Coordinates of a Nonlinear System Arthur J. Krener 1 University of California, Davis, CA and Naval Postgraduate School, Monterey, CA ajkrener@ucdavis.edu Summary. We offer an alternative
The Important State Coordinates of a Nonlinear System Arthur J. Krener 1 University of California, Davis, CA and Naval Postgraduate School, Monterey, CA ajkrener@ucdavis.edu Summary. We offer an alternative
Model reduction for linear systems by balancing
 Model reduction for linear systems by balancing Bart Besselink Jan C. Willems Center for Systems and Control Johann Bernoulli Institute for Mathematics and Computer Science University of Groningen, Groningen,
Model reduction for linear systems by balancing Bart Besselink Jan C. Willems Center for Systems and Control Johann Bernoulli Institute for Mathematics and Computer Science University of Groningen, Groningen,
Robust Multivariable Control
 Lecture 2 Anders Helmersson anders.helmersson@liu.se ISY/Reglerteknik Linköpings universitet Today s topics Today s topics Norms Today s topics Norms Representation of dynamic systems Today s topics Norms
Lecture 2 Anders Helmersson anders.helmersson@liu.se ISY/Reglerteknik Linköpings universitet Today s topics Today s topics Norms Today s topics Norms Representation of dynamic systems Today s topics Norms
Model Reduction for Unstable Systems
 Model Reduction for Unstable Systems Klajdi Sinani Virginia Tech klajdi@vt.edu Advisor: Serkan Gugercin October 22, 2015 (VT) SIAM October 22, 2015 1 / 26 Overview 1 Introduction 2 Interpolatory Model
Model Reduction for Unstable Systems Klajdi Sinani Virginia Tech klajdi@vt.edu Advisor: Serkan Gugercin October 22, 2015 (VT) SIAM October 22, 2015 1 / 26 Overview 1 Introduction 2 Interpolatory Model
Linearization problem. The simplest example
 Linear Systems Lecture 3 1 problem Consider a non-linear time-invariant system of the form ( ẋ(t f x(t u(t y(t g ( x(t u(t (1 such that x R n u R m y R p and Slide 1 A: f(xu f(xu g(xu and g(xu exist and
Linear Systems Lecture 3 1 problem Consider a non-linear time-invariant system of the form ( ẋ(t f x(t u(t y(t g ( x(t u(t (1 such that x R n u R m y R p and Slide 1 A: f(xu f(xu g(xu and g(xu exist and
Nonlinear Control Systems
 Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 5. Input-Output Stability DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs2012/ 2012 1 Input-Output Stability y = Hu H denotes
Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 5. Input-Output Stability DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs2012/ 2012 1 Input-Output Stability y = Hu H denotes
Balanced Truncation 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 2004: MODEL REDUCTION Balanced Truncation This lecture introduces balanced truncation for LTI
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 2004: MODEL REDUCTION Balanced Truncation This lecture introduces balanced truncation for LTI
7.1 Linear Systems Stability Consider the Continuous-Time (CT) Linear Time-Invariant (LTI) system
 Linear Time-Invariant (LTI) system") 7 Stability 7.1 Linear Systems Stability Consider the Continuous-Time (CT) Linear Time-Invariant (LTI) system ẋ(t) = A x(t), x(0) = x 0, A R n n, x 0 R n. (14) The origin x = 0 is a globally asymptotically
7 Stability 7.1 Linear Systems Stability Consider the Continuous-Time (CT) Linear Time-Invariant (LTI) system ẋ(t) = A x(t), x(0) = x 0, A R n n, x 0 R n. (14) The origin x = 0 is a globally asymptotically
arxiv: v1 [math.oc] 29 Apr 2017
![arxiv: v1 [math.oc] 29 Apr 2017](/thumbs/88/117680642.jpg "arxiv: v1 [math.oc] 29 Apr 2017") BALANCED TRUNCATION MODEL ORDER REDUCTION FOR QUADRATIC-BILINEAR CONTROL SYSTEMS PETER BENNER AND PAWAN GOYAL arxiv:175.16v1 [math.oc] 29 Apr 217 Abstract. We discuss balanced truncation model order reduction
BALANCED TRUNCATION MODEL ORDER REDUCTION FOR QUADRATIC-BILINEAR CONTROL SYSTEMS PETER BENNER AND PAWAN GOYAL arxiv:175.16v1 [math.oc] 29 Apr 217 Abstract. We discuss balanced truncation model order reduction
Modelling fuel cells in start-up and reactant starvation conditions
 Modelling fuel cells in start-up and reactant starvation conditions Brian Wetton Radu Bradean Keith Promislow Jean St Pierre Mathematics Department University of British Columbia www.math.ubc.ca/ wetton
Modelling fuel cells in start-up and reactant starvation conditions Brian Wetton Radu Bradean Keith Promislow Jean St Pierre Mathematics Department University of British Columbia www.math.ubc.ca/ wetton
Balancing of Lossless and Passive Systems
 Balancing of Lossless and Passive Systems Arjan van der Schaft Abstract Different balancing techniques are applied to lossless nonlinear systems, with open-loop balancing applied to their scattering representation.
Balancing of Lossless and Passive Systems Arjan van der Schaft Abstract Different balancing techniques are applied to lossless nonlinear systems, with open-loop balancing applied to their scattering representation.
BALANCING-RELATED MODEL REDUCTION FOR DATA-SPARSE SYSTEMS
 BALANCING-RELATED Peter Benner Professur Mathematik in Industrie und Technik Fakultät für Mathematik Technische Universität Chemnitz Computational Methods with Applications Harrachov, 19 25 August 2007
BALANCING-RELATED Peter Benner Professur Mathematik in Industrie und Technik Fakultät für Mathematik Technische Universität Chemnitz Computational Methods with Applications Harrachov, 19 25 August 2007
Balanced realization and model order reduction for nonlinear systems based on singular value analysis
 Balanced realization and model order reduction for nonlinear systems based on singular value analysis Kenji Fujimoto a, and Jacquelien M. A. Scherpen b a Department of Mechanical Science and Engineering
Balanced realization and model order reduction for nonlinear systems based on singular value analysis Kenji Fujimoto a, and Jacquelien M. A. Scherpen b a Department of Mechanical Science and Engineering
ME 234, Lyapunov and Riccati Problems. 1. This problem is to recall some facts and formulae you already know. e Aτ BB e A τ dτ
 ME 234, Lyapunov and Riccati Problems. This problem is to recall some facts and formulae you already know. (a) Let A and B be matrices of appropriate dimension. Show that (A, B) is controllable if and
ME 234, Lyapunov and Riccati Problems. This problem is to recall some facts and formulae you already know. (a) Let A and B be matrices of appropriate dimension. Show that (A, B) is controllable if and
Equilibrium points: continuous-time systems
 Capitolo 0 INTRODUCTION 81 Equilibrium points: continuous-time systems Let us consider the following continuous-time linear system ẋ(t) Ax(t)+Bu(t) y(t) Cx(t)+Du(t) The equilibrium points x 0 of the system
Capitolo 0 INTRODUCTION 81 Equilibrium points: continuous-time systems Let us consider the following continuous-time linear system ẋ(t) Ax(t)+Bu(t) y(t) Cx(t)+Du(t) The equilibrium points x 0 of the system
CDS Solutions to the Midterm Exam
 CDS 22 - Solutions to the Midterm Exam Instructor: Danielle C. Tarraf November 6, 27 Problem (a) Recall that the H norm of a transfer function is time-delay invariant. Hence: ( ) Ĝ(s) = s + a = sup /2
CDS 22 - Solutions to the Midterm Exam Instructor: Danielle C. Tarraf November 6, 27 Problem (a) Recall that the H norm of a transfer function is time-delay invariant. Hence: ( ) Ĝ(s) = s + a = sup /2
Hankel Optimal Model Reduction 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 2004: MODEL REDUCTION Hankel Optimal Model Reduction 1 This lecture covers both the theory and
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 2004: MODEL REDUCTION Hankel Optimal Model Reduction 1 This lecture covers both the theory and
Control Systems Design
 ELEC4410 Control Systems Design Lecture 14: Controllability Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 14: Controllability p.1/23 Outline
ELEC4410 Control Systems Design Lecture 14: Controllability Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 14: Controllability p.1/23 Outline
H 2 optimal model reduction - Wilson s conditions for the cross-gramian
 H 2 optimal model reduction - Wilson s conditions for the cross-gramian Ha Binh Minh a, Carles Batlle b a School of Applied Mathematics and Informatics, Hanoi University of Science and Technology, Dai
H 2 optimal model reduction - Wilson s conditions for the cross-gramian Ha Binh Minh a, Carles Batlle b a School of Applied Mathematics and Informatics, Hanoi University of Science and Technology, Dai
Grammians. Matthew M. Peet. Lecture 20: Grammians. Illinois Institute of Technology
 Grammians Matthew M. Peet Illinois Institute of Technology Lecture 2: Grammians Lyapunov Equations Proposition 1. Suppose A is Hurwitz and Q is a square matrix. Then X = e AT s Qe As ds is the unique solution
Grammians Matthew M. Peet Illinois Institute of Technology Lecture 2: Grammians Lyapunov Equations Proposition 1. Suppose A is Hurwitz and Q is a square matrix. Then X = e AT s Qe As ds is the unique solution
Optimal Control. Lecture 18. Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen. March 29, Ref: Bryson & Ho Chapter 4.
 Optimal Control Lecture 18 Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen Ref: Bryson & Ho Chapter 4. March 29, 2004 Outline Hamilton-Jacobi-Bellman (HJB) Equation Iterative solution of HJB Equation
Optimal Control Lecture 18 Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen Ref: Bryson & Ho Chapter 4. March 29, 2004 Outline Hamilton-Jacobi-Bellman (HJB) Equation Iterative solution of HJB Equation
1. Find the solution of the following uncontrolled linear system. 2 α 1 1
 Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Estimation of Optimum Operating Profile for PEMFC
 59 10.1149/1.3210559 The Electrochemical Society Estimation of Optimum Operating Profile for PEMFC Venkat Subramanian, Ravi Methekar, Venkatasailanathan Ramadesigan, Vijayasekaran Boovaragavan, Cynthia
59 10.1149/1.3210559 The Electrochemical Society Estimation of Optimum Operating Profile for PEMFC Venkat Subramanian, Ravi Methekar, Venkatasailanathan Ramadesigan, Vijayasekaran Boovaragavan, Cynthia
EE363 homework 8 solutions
 EE363 Prof. S. Boyd EE363 homework 8 solutions 1. Lyapunov condition for passivity. The system described by ẋ = f(x, u), y = g(x), x() =, with u(t), y(t) R m, is said to be passive if t u(τ) T y(τ) dτ
EE363 Prof. S. Boyd EE363 homework 8 solutions 1. Lyapunov condition for passivity. The system described by ẋ = f(x, u), y = g(x), x() =, with u(t), y(t) R m, is said to be passive if t u(τ) T y(τ) dτ
Efficient Implementation of Large Scale Lyapunov and Riccati Equation Solvers
 Efficient Implementation of Large Scale Lyapunov and Riccati Equation Solvers Jens Saak joint work with Peter Benner (MiIT) Professur Mathematik in Industrie und Technik (MiIT) Fakultät für Mathematik
Efficient Implementation of Large Scale Lyapunov and Riccati Equation Solvers Jens Saak joint work with Peter Benner (MiIT) Professur Mathematik in Industrie und Technik (MiIT) Fakultät für Mathematik
Nonlinear Control. Nonlinear Control Lecture # 3 Stability of Equilibrium Points
 Nonlinear Control Lecture # 3 Stability of Equilibrium Points The Invariance Principle Definitions Let x(t) be a solution of ẋ = f(x) A point p is a positive limit point of x(t) if there is a sequence
Nonlinear Control Lecture # 3 Stability of Equilibrium Points The Invariance Principle Definitions Let x(t) be a solution of ẋ = f(x) A point p is a positive limit point of x(t) if there is a sequence
Riccati Equations and Inequalities in Robust Control
 Riccati Equations and Inequalities in Robust Control Lianhao Yin Gabriel Ingesson Martin Karlsson Optimal Control LP4 2014 June 10, 2014 Lianhao Yin Gabriel Ingesson Martin Karlsson (LTH) H control problem
Riccati Equations and Inequalities in Robust Control Lianhao Yin Gabriel Ingesson Martin Karlsson Optimal Control LP4 2014 June 10, 2014 Lianhao Yin Gabriel Ingesson Martin Karlsson (LTH) H control problem
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 8: Basic Lyapunov Stability Theory
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 p.1/17 Stability in the sense of Lyapunov A
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 p.1/17 Stability in the sense of Lyapunov A
1 Controllability and Observability
 1 Controllability and Observability 1.1 Linear Time-Invariant (LTI) Systems State-space: Dimensions: Notation Transfer function: ẋ = Ax+Bu, x() = x, y = Cx+Du. x R n, u R m, y R p. Note that H(s) is always
1 Controllability and Observability 1.1 Linear Time-Invariant (LTI) Systems State-space: Dimensions: Notation Transfer function: ẋ = Ax+Bu, x() = x, y = Cx+Du. x R n, u R m, y R p. Note that H(s) is always
Observability. Dynamic Systems. Lecture 2 Observability. Observability, continuous time: Observability, discrete time: = h (2) (x, u, u)
 (x, u, u)") Observability Dynamic Systems Lecture 2 Observability Continuous time model: Discrete time model: ẋ(t) = f (x(t), u(t)), y(t) = h(x(t), u(t)) x(t + 1) = f (x(t), u(t)), y(t) = h(x(t)) Reglerteknik, ISY,
Observability Dynamic Systems Lecture 2 Observability Continuous time model: Discrete time model: ẋ(t) = f (x(t), u(t)), y(t) = h(x(t), u(t)) x(t + 1) = f (x(t), u(t)), y(t) = h(x(t)) Reglerteknik, ISY,
Homework Solution # 3
 ECSE 644 Optimal Control Feb, 4 Due: Feb 17, 4 (Tuesday) Homework Solution # 3 1 (5%) Consider the discrete nonlinear control system in Homework # For the optimal control and trajectory that you have found
ECSE 644 Optimal Control Feb, 4 Due: Feb 17, 4 (Tuesday) Homework Solution # 3 1 (5%) Consider the discrete nonlinear control system in Homework # For the optimal control and trajectory that you have found
A nemlineáris rendszer- és irányításelmélet alapjai Relative degree and Zero dynamics (Lie-derivatives)
") A nemlineáris rendszer- és irányításelmélet alapjai Relative degree and Zero dynamics (Lie-derivatives) Hangos Katalin BME Analízis Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium MTA Számítástechnikai
A nemlineáris rendszer- és irányításelmélet alapjai Relative degree and Zero dynamics (Lie-derivatives) Hangos Katalin BME Analízis Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium MTA Számítástechnikai
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 22: Balanced Realization Readings: DDV, Chapter 26 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 27, 2011 E. Frazzoli
6.241 Dynamic Systems and Control Lecture 22: Balanced Realization Readings: DDV, Chapter 26 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 27, 2011 E. Frazzoli
Review: control, feedback, etc. Today s topic: state-space models of systems; linearization
 Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
NUMERICAL ANALYSIS ON 36cm 2 PEM FUEL CELL FOR PERFORMANCE ENHANCEMENT
 NUMERICAL ANALYSIS ON 36cm 2 PEM FUEL CELL FOR PERFORMANCE ENHANCEMENT Lakshminarayanan V 1, Karthikeyan P 2, D. S. Kiran Kumar 1 and SMK Dhilip Kumar 1 1 Department of Mechanical Engineering, KGiSL Institute
NUMERICAL ANALYSIS ON 36cm 2 PEM FUEL CELL FOR PERFORMANCE ENHANCEMENT Lakshminarayanan V 1, Karthikeyan P 2, D. S. Kiran Kumar 1 and SMK Dhilip Kumar 1 1 Department of Mechanical Engineering, KGiSL Institute
Introduction to Modern Control MT 2016
 CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Lecture 2 First-order ordinary differential equations (ODE) Solution of a linear ODE Hints to nonlinear
CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Lecture 2 First-order ordinary differential equations (ODE) Solution of a linear ODE Hints to nonlinear
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science : Dynamic Systems Spring 2011
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.4: Dynamic Systems Spring Homework Solutions Exercise 3. a) We are given the single input LTI system: [
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.4: Dynamic Systems Spring Homework Solutions Exercise 3. a) We are given the single input LTI system: [
Gramians based model reduction for hybrid switched systems
 Gramians based model reduction for hybrid switched systems Y. Chahlaoui Younes.Chahlaoui@manchester.ac.uk Centre for Interdisciplinary Computational and Dynamical Analysis (CICADA) School of Mathematics
Gramians based model reduction for hybrid switched systems Y. Chahlaoui Younes.Chahlaoui@manchester.ac.uk Centre for Interdisciplinary Computational and Dynamical Analysis (CICADA) School of Mathematics
Global Analysis of Piecewise Linear Systems Using Impact Maps and Quadratic Surface Lyapunov Functions
 Global Analysis of Piecewise Linear Systems Using Impact Maps and Quadratic Surface Lyapunov Functions Jorge M. Gonçalves, Alexandre Megretski, Munther A. Dahleh Department of EECS, Room 35-41 MIT, Cambridge,
Global Analysis of Piecewise Linear Systems Using Impact Maps and Quadratic Surface Lyapunov Functions Jorge M. Gonçalves, Alexandre Megretski, Munther A. Dahleh Department of EECS, Room 35-41 MIT, Cambridge,
UCLA Chemical Engineering. Process & Control Systems Engineering Laboratory
 Constrained Innite-time Optimal Control Donald J. Chmielewski Chemical Engineering Department University of California Los Angeles February 23, 2000 Stochastic Formulation - Min Max Formulation - UCLA
Constrained Innite-time Optimal Control Donald J. Chmielewski Chemical Engineering Department University of California Los Angeles February 23, 2000 Stochastic Formulation - Min Max Formulation - UCLA
Modern Optimal Control
 Modern Optimal Control Matthew M. Peet Arizona State University Lecture 19: Stabilization via LMIs Optimization Optimization can be posed in functional form: min x F objective function : inequality constraints
Modern Optimal Control Matthew M. Peet Arizona State University Lecture 19: Stabilization via LMIs Optimization Optimization can be posed in functional form: min x F objective function : inequality constraints
Last lecture: Recurrence relations and differential equations. The solution to the differential equation dx
 Last lecture: Recurrence relations and differential equations The solution to the differential equation dx = ax is x(t) = ce ax, where c = x() is determined by the initial conditions x(t) Let X(t) = and
Last lecture: Recurrence relations and differential equations The solution to the differential equation dx = ax is x(t) = ce ax, where c = x() is determined by the initial conditions x(t) Let X(t) = and
Quadratic Stability of Dynamical Systems. Raktim Bhattacharya Aerospace Engineering, Texas A&M University
 .. Quadratic Stability of Dynamical Systems Raktim Bhattacharya Aerospace Engineering, Texas A&M University Quadratic Lyapunov Functions Quadratic Stability Dynamical system is quadratically stable if
.. Quadratic Stability of Dynamical Systems Raktim Bhattacharya Aerospace Engineering, Texas A&M University Quadratic Lyapunov Functions Quadratic Stability Dynamical system is quadratically stable if
Iterative Rational Krylov Algorithm for Unstable Dynamical Systems and Generalized Coprime Factorizations
 Iterative Rational Krylov Algorithm for Unstable Dynamical Systems and Generalized Coprime Factorizations Klajdi Sinani Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University
Iterative Rational Krylov Algorithm for Unstable Dynamical Systems and Generalized Coprime Factorizations Klajdi Sinani Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University
State Regulator. Advanced Control. design of controllers using pole placement and LQ design rules
 Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Intro. Computer Control Systems: F8
 Intro. Computer Control Systems: F8 Properties of state-space descriptions and feedback Dave Zachariah Dept. Information Technology, Div. Systems and Control 1 / 22 dave.zachariah@it.uu.se F7: Quiz! 2
Intro. Computer Control Systems: F8 Properties of state-space descriptions and feedback Dave Zachariah Dept. Information Technology, Div. Systems and Control 1 / 22 dave.zachariah@it.uu.se F7: Quiz! 2
Input to state Stability
 Input to state Stability Mini course, Universität Stuttgart, November 2004 Lars Grüne, Mathematisches Institut, Universität Bayreuth Part IV: Applications ISS Consider with solutions ϕ(t, x, w) ẋ(t) =
Input to state Stability Mini course, Universität Stuttgart, November 2004 Lars Grüne, Mathematisches Institut, Universität Bayreuth Part IV: Applications ISS Consider with solutions ϕ(t, x, w) ẋ(t) =
Observability. It was the property in Lyapunov stability which allowed us to resolve that
 Observability We have seen observability twice already It was the property which permitted us to retrieve the initial state from the initial data {u(0),y(0),u(1),y(1),...,u(n 1),y(n 1)} It was the property
Observability We have seen observability twice already It was the property which permitted us to retrieve the initial state from the initial data {u(0),y(0),u(1),y(1),...,u(n 1),y(n 1)} It was the property
Modeling the Behaviour of a Polymer Electrolyte Membrane within a Fuel Cell Using COMSOL
 Modeling the Behaviour of a Polymer Electrolyte Membrane within a Fuel Cell Using COMSOL S. Beharry 1 1 University of the West Indies, St. Augustine, Trinidad and Tobago Abstract: In recent years, scientists
Modeling the Behaviour of a Polymer Electrolyte Membrane within a Fuel Cell Using COMSOL S. Beharry 1 1 University of the West Indies, St. Augustine, Trinidad and Tobago Abstract: In recent years, scientists
1 Relative degree and local normal forms
 THE ZERO DYNAMICS OF A NONLINEAR SYSTEM 1 Relative degree and local normal orms The purpose o this Section is to show how single-input single-output nonlinear systems can be locally given, by means o a
THE ZERO DYNAMICS OF A NONLINEAR SYSTEM 1 Relative degree and local normal orms The purpose o this Section is to show how single-input single-output nonlinear systems can be locally given, by means o a
Dr. V.LAKSHMINARAYANAN Department of Mechanical Engineering, B V Raju Institute of Technology, Narsapur, Telangana,, India
 Parametric analysis performed on 49 cm 2 serpentine flow channel of PEM fuel cell by Taguchi method (Parametric analysis performed on PEMFC by Taguchi method) Dr. V.LAKSHMINARAYANAN Department of Mechanical
Parametric analysis performed on 49 cm 2 serpentine flow channel of PEM fuel cell by Taguchi method (Parametric analysis performed on PEMFC by Taguchi method) Dr. V.LAKSHMINARAYANAN Department of Mechanical
Controllability, Observability, Full State Feedback, Observer Based Control
 Multivariable Control Lecture 4 Controllability, Observability, Full State Feedback, Observer Based Control John T. Wen September 13, 24 Ref: 3.2-3.4 of Text Controllability ẋ = Ax + Bu; x() = x. At time
Multivariable Control Lecture 4 Controllability, Observability, Full State Feedback, Observer Based Control John T. Wen September 13, 24 Ref: 3.2-3.4 of Text Controllability ẋ = Ax + Bu; x() = x. At time
Lecture Note #6 (Chap.10)
") System Modeling and Identification Lecture Note #6 (Chap.) CBE 7 Korea University Prof. Dae Ryook Yang Chap. Model Approximation Model approximation Simplification, approximation and order reduction of
System Modeling and Identification Lecture Note #6 (Chap.) CBE 7 Korea University Prof. Dae Ryook Yang Chap. Model Approximation Model approximation Simplification, approximation and order reduction of
Minimum-Phase Property of Nonlinear Systems in Terms of a Dissipation Inequality
 Minimum-Phase Property of Nonlinear Systems in Terms of a Dissipation Inequality Christian Ebenbauer Institute for Systems Theory in Engineering, University of Stuttgart, 70550 Stuttgart, Germany ce@ist.uni-stuttgart.de
Minimum-Phase Property of Nonlinear Systems in Terms of a Dissipation Inequality Christian Ebenbauer Institute for Systems Theory in Engineering, University of Stuttgart, 70550 Stuttgart, Germany ce@ist.uni-stuttgart.de
Clustering-based State Aggregation of Dynamical Networks
 Clustering-based State Aggregation of Dynamical Networks Takayuki Ishizaki Ph.D. from Tokyo Institute of Technology (March 2012) Research Fellow of the Japan Society for the Promotion of Science More than
Clustering-based State Aggregation of Dynamical Networks Takayuki Ishizaki Ph.D. from Tokyo Institute of Technology (March 2012) Research Fellow of the Japan Society for the Promotion of Science More than
EEE582 Homework Problems
 EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
ẋ n = f n (x 1,...,x n,u 1,...,u m ) (5) y 1 = g 1 (x 1,...,x n,u 1,...,u m ) (6) y p = g p (x 1,...,x n,u 1,...,u m ) (7)
 (5) y 1 = g 1 (x 1,...,x n,u 1,...,u m ) (6) y p = g p (x 1,...,x n,u 1,...,u m ) (7)") EEE582 Topical Outline A.A. Rodriguez Fall 2007 GWC 352, 965-3712 The following represents a detailed topical outline of the course. It attempts to highlight most of the key concepts to be covered and
EEE582 Topical Outline A.A. Rodriguez Fall 2007 GWC 352, 965-3712 The following represents a detailed topical outline of the course. It attempts to highlight most of the key concepts to be covered and
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems. p. 1/1
 Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
Test 2 Review Math 1111 College Algebra
 Test 2 Review Math 1111 College Algebra 1. Begin by graphing the standard quadratic function f(x) = x 2. Then use transformations of this graph to graph the given function. g(x) = x 2 + 2 *a. b. c. d.
Test 2 Review Math 1111 College Algebra 1. Begin by graphing the standard quadratic function f(x) = x 2. Then use transformations of this graph to graph the given function. g(x) = x 2 + 2 *a. b. c. d.
Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems
 Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems Antoni Ras Departament de Matemàtica Aplicada 4 Universitat Politècnica de Catalunya Lecture goals To review the basic
Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems Antoni Ras Departament de Matemàtica Aplicada 4 Universitat Politècnica de Catalunya Lecture goals To review the basic
Lecture 8. Chapter 5: Input-Output Stability Chapter 6: Passivity Chapter 14: Passivity-Based Control. Eugenio Schuster.
 Lecture 8 Chapter 5: Input-Output Stability Chapter 6: Passivity Chapter 14: Passivity-Based Control Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture
Lecture 8 Chapter 5: Input-Output Stability Chapter 6: Passivity Chapter 14: Passivity-Based Control Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture
Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013
 Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013 Abstract As in optimal control theory, linear quadratic (LQ) differential games (DG) can be solved, even in high dimension,
Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013 Abstract As in optimal control theory, linear quadratic (LQ) differential games (DG) can be solved, even in high dimension,
Balanced Model Reduction
 1 Balanced Realization Balanced Model Reduction CEE 629. System Identification Duke University, Fall 17 A balanced realization is a realization for which the controllability gramian Q and the observability
1 Balanced Realization Balanced Model Reduction CEE 629. System Identification Duke University, Fall 17 A balanced realization is a realization for which the controllability gramian Q and the observability
Dynamic Analysis of an Ethanol Steam Reformer for Hydrogen Production
 Dynamic Analysis of an Ethanol Steam Reformer for Hydrogen Production Omar R. Llerena Pizarro a, Carlos Ocampo-Martinez b, Senior Member, IEEE, Maria Serra Prat b and José Luz Silveira c a Laboratory of
Dynamic Analysis of an Ethanol Steam Reformer for Hydrogen Production Omar R. Llerena Pizarro a, Carlos Ocampo-Martinez b, Senior Member, IEEE, Maria Serra Prat b and José Luz Silveira c a Laboratory of
OPTIMAL CONTROL. Sadegh Bolouki. Lecture slides for ECE 515. University of Illinois, Urbana-Champaign. Fall S. Bolouki (UIUC) 1 / 28
 1 / 28") OPTIMAL CONTROL Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 28 (Example from Optimal Control Theory, Kirk) Objective: To get from
OPTIMAL CONTROL Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 28 (Example from Optimal Control Theory, Kirk) Objective: To get from
Numerical Methods for ODEs. Lectures for PSU Summer Programs Xiantao Li
 Numerical Methods for ODEs Lectures for PSU Summer Programs Xiantao Li Outline Introduction Some Challenges Numerical methods for ODEs Stiff ODEs Accuracy Constrained dynamics Stability Coarse-graining
Numerical Methods for ODEs Lectures for PSU Summer Programs Xiantao Li Outline Introduction Some Challenges Numerical methods for ODEs Stiff ODEs Accuracy Constrained dynamics Stability Coarse-graining
Kalman Decomposition B 2. z = T 1 x, where C = ( C. z + u (7) T 1, and. where B = T, and
 T 1, and. where B = T, and") Kalman Decomposition Controllable / uncontrollable decomposition Suppose that the controllability matrix C R n n of a system has rank n 1
Kalman Decomposition Controllable / uncontrollable decomposition Suppose that the controllability matrix C R n n of a system has rank n 1
EE363 homework 7 solutions
 EE363 Prof. S. Boyd EE363 homework 7 solutions 1. Gain margin for a linear quadratic regulator. Let K be the optimal state feedback gain for the LQR problem with system ẋ = Ax + Bu, state cost matrix Q,
EE363 Prof. S. Boyd EE363 homework 7 solutions 1. Gain margin for a linear quadratic regulator. Let K be the optimal state feedback gain for the LQR problem with system ẋ = Ax + Bu, state cost matrix Q,
Lagrangian Analysis of 2D and 3D Ocean Flows from Eulerian Velocity Data
 Flows from Second-year Ph.D. student, Applied Math and Scientific Computing Project Advisor: Kayo Ide Department of Atmospheric and Oceanic Science Center for Scientific Computation and Mathematical Modeling
Flows from Second-year Ph.D. student, Applied Math and Scientific Computing Project Advisor: Kayo Ide Department of Atmospheric and Oceanic Science Center for Scientific Computation and Mathematical Modeling
Solution of Additional Exercises for Chapter 4
 1 1. (1) Try V (x) = 1 (x 1 + x ). Solution of Additional Exercises for Chapter 4 V (x) = x 1 ( x 1 + x ) x = x 1 x + x 1 x In the neighborhood of the origin, the term (x 1 + x ) dominates. Hence, the
1 1. (1) Try V (x) = 1 (x 1 + x ). Solution of Additional Exercises for Chapter 4 V (x) = x 1 ( x 1 + x ) x = x 1 x + x 1 x In the neighborhood of the origin, the term (x 1 + x ) dominates. Hence, the
Linear Matrix Inequality (LMI)
") Linear Matrix Inequality (LMI) A linear matrix inequality is an expression of the form where F (x) F 0 + x 1 F 1 + + x m F m > 0 (1) x = (x 1,, x m ) R m, F 0,, F m are real symmetric matrices, and the
Linear Matrix Inequality (LMI) A linear matrix inequality is an expression of the form where F (x) F 0 + x 1 F 1 + + x m F m > 0 (1) x = (x 1,, x m ) R m, F 0,, F m are real symmetric matrices, and the
ECE504: Lecture 8. D. Richard Brown III. Worcester Polytechnic Institute. 28-Oct-2008
 ECE504: Lecture 8 D. Richard Brown III Worcester Polytechnic Institute 28-Oct-2008 Worcester Polytechnic Institute D. Richard Brown III 28-Oct-2008 1 / 30 Lecture 8 Major Topics ECE504: Lecture 8 We are
ECE504: Lecture 8 D. Richard Brown III Worcester Polytechnic Institute 28-Oct-2008 Worcester Polytechnic Institute D. Richard Brown III 28-Oct-2008 1 / 30 Lecture 8 Major Topics ECE504: Lecture 8 We are
Applied Math Qualifying Exam 11 October Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems.
 Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
CME 345: MODEL REDUCTION
 CME 345: MODEL REDUCTION Balanced Truncation Charbel Farhat & David Amsallem Stanford University cfarhat@stanford.edu These slides are based on the recommended textbook: A.C. Antoulas, Approximation of
CME 345: MODEL REDUCTION Balanced Truncation Charbel Farhat & David Amsallem Stanford University cfarhat@stanford.edu These slides are based on the recommended textbook: A.C. Antoulas, Approximation of
Lecture 4. Chapter 4: Lyapunov Stability. Eugenio Schuster. Mechanical Engineering and Mechanics Lehigh University.
 Lecture 4 Chapter 4: Lyapunov Stability Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 4 p. 1/86 Autonomous Systems Consider the autonomous system ẋ
Lecture 4 Chapter 4: Lyapunov Stability Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 4 p. 1/86 Autonomous Systems Consider the autonomous system ẋ
Problem Set 8 Solutions 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6245: MULTIVARIABLE CONTROL SYSTEMS by A Megretski Problem Set 8 Solutions 1 The problem set deals with H-Infinity
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6245: MULTIVARIABLE CONTROL SYSTEMS by A Megretski Problem Set 8 Solutions 1 The problem set deals with H-Infinity
Pseudospectra and Nonnormal Dynamical Systems
 Pseudospectra and Nonnormal Dynamical Systems Mark Embree and Russell Carden Computational and Applied Mathematics Rice University Houston, Texas ELGERSBURG MARCH 1 Overview of the Course These lectures
Pseudospectra and Nonnormal Dynamical Systems Mark Embree and Russell Carden Computational and Applied Mathematics Rice University Houston, Texas ELGERSBURG MARCH 1 Overview of the Course These lectures
DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION
 Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
Available online at ScienceDirect. IFAC PapersOnLine 50-1 (2017)
") Available online at www.sciencedirect.com ScienceDirect IFAC PapersOnLine 5-1 (217) 1188 1193 Temperature control of open-cathode PEM fuel cells Stephan Strahl Ramon Costa-Castelló Institut de Robòtica
Available online at www.sciencedirect.com ScienceDirect IFAC PapersOnLine 5-1 (217) 1188 1193 Temperature control of open-cathode PEM fuel cells Stephan Strahl Ramon Costa-Castelló Institut de Robòtica
EE C128 / ME C134 Feedback Control Systems
 EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
Lecture 10: Singular Perturbations and Averaging 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.243j (Fall 2003): DYNAMICS OF NONLINEAR SYSTEMS by A. Megretski Lecture 10: Singular Perturbations and
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.243j (Fall 2003): DYNAMICS OF NONLINEAR SYSTEMS by A. Megretski Lecture 10: Singular Perturbations and
Problem 1 Cost of an Infinite Horizon LQR
 THE UNIVERSITY OF TEXAS AT SAN ANTONIO EE 5243 INTRODUCTION TO CYBER-PHYSICAL SYSTEMS H O M E W O R K # 5 Ahmad F. Taha October 12, 215 Homework Instructions: 1. Type your solutions in the LATEX homework
THE UNIVERSITY OF TEXAS AT SAN ANTONIO EE 5243 INTRODUCTION TO CYBER-PHYSICAL SYSTEMS H O M E W O R K # 5 Ahmad F. Taha October 12, 215 Homework Instructions: 1. Type your solutions in the LATEX homework
Lecture Note #6 (Chap.10)
") System Modeling and Identification Lecture Note #6 (Chap.) CBE 7 Korea University Prof. Dae Ryoo Yang Chap. Model Approximation Model approximation Simplification, approximation and order reduction of
System Modeling and Identification Lecture Note #6 (Chap.) CBE 7 Korea University Prof. Dae Ryoo Yang Chap. Model Approximation Model approximation Simplification, approximation and order reduction of
BALANCING AS A MOMENT MATCHING PROBLEM
 BALANCING AS A MOMENT MATCHING PROBLEM T.C. IONESCU, J.M.A. SCHERPEN, O.V. IFTIME, AND A. ASTOLFI Abstract. In this paper, we treat a time-domain moment matching problem associated to balanced truncation.
BALANCING AS A MOMENT MATCHING PROBLEM T.C. IONESCU, J.M.A. SCHERPEN, O.V. IFTIME, AND A. ASTOLFI Abstract. In this paper, we treat a time-domain moment matching problem associated to balanced truncation.
Mathematical Modeling for a PEM Fuel Cell.
 Mathematical Modeling for a PEM Fuel Cell. Mentor: Dr. Christopher Raymond, NJIT. Group Jutta Bikowski, Colorado State University Aranya Chakrabortty, RPI Kamyar Hazaveh, Georgia Institute of Technology
Mathematical Modeling for a PEM Fuel Cell. Mentor: Dr. Christopher Raymond, NJIT. Group Jutta Bikowski, Colorado State University Aranya Chakrabortty, RPI Kamyar Hazaveh, Georgia Institute of Technology
Nonlinear Control Lecture # 14 Input-Output Stability. Nonlinear Control
 Nonlinear Control Lecture # 14 Input-Output Stability L Stability Input-Output Models: y = Hu u(t) is a piecewise continuous function of t and belongs to a linear space of signals The space of bounded
Nonlinear Control Lecture # 14 Input-Output Stability L Stability Input-Output Models: y = Hu u(t) is a piecewise continuous function of t and belongs to a linear space of signals The space of bounded
Moving Frontiers in Model Reduction Using Numerical Linear Algebra
 Using Numerical Linear Algebra Max-Planck-Institute for Dynamics of Complex Technical Systems Computational Methods in Systems and Control Theory Group Magdeburg, Germany Technische Universität Chemnitz
Using Numerical Linear Algebra Max-Planck-Institute for Dynamics of Complex Technical Systems Computational Methods in Systems and Control Theory Group Magdeburg, Germany Technische Universität Chemnitz
Krylov Subspace Methods for Nonlinear Model Reduction
 MAX PLANCK INSTITUT Conference in honour of Nancy Nichols 70th birthday Reading, 2 3 July 2012 Krylov Subspace Methods for Nonlinear Model Reduction Peter Benner and Tobias Breiten Max Planck Institute
MAX PLANCK INSTITUT Conference in honour of Nancy Nichols 70th birthday Reading, 2 3 July 2012 Krylov Subspace Methods for Nonlinear Model Reduction Peter Benner and Tobias Breiten Max Planck Institute
Modeling as a tool for understanding the MEA. Henrik Ekström Utö Summer School, June 22 nd 2010
 Modeling as a tool for understanding the MEA Henrik Ekström Utö Summer School, June 22 nd 2010 COMSOL Multiphysics and Electrochemistry Modeling The software is based on the finite element method A number
Modeling as a tool for understanding the MEA Henrik Ekström Utö Summer School, June 22 nd 2010 COMSOL Multiphysics and Electrochemistry Modeling The software is based on the finite element method A number
Chapter 3 - Solved Problems
 Chapter 3 - Solved Problems Solved Problem 3.. A nonlinear system has an input-output model given by dy(t) + ( + 0.2y(t))y(t) = u(t) + 0.2u(t) 3 () 3.. Compute the operating point(s) for u Q = 2. (assume
Chapter 3 - Solved Problems Solved Problem 3.. A nonlinear system has an input-output model given by dy(t) + ( + 0.2y(t))y(t) = u(t) + 0.2u(t) 3 () 3.. Compute the operating point(s) for u Q = 2. (assume
Input-to-state stability and interconnected Systems
 10th Elgersburg School Day 1 Input-to-state stability and interconnected Systems Sergey Dashkovskiy Universität Würzburg Elgersburg, March 5, 2018 1/20 Introduction Consider Solution: ẋ := dx dt = ax,
10th Elgersburg School Day 1 Input-to-state stability and interconnected Systems Sergey Dashkovskiy Universität Würzburg Elgersburg, March 5, 2018 1/20 Introduction Consider Solution: ẋ := dx dt = ax,
LMIs for Observability and Observer Design
 LMIs for Observability and Observer Design Matthew M. Peet Arizona State University Lecture 06: LMIs for Observability and Observer Design Observability Consider a system with no input: ẋ(t) = Ax(t), x(0)
LMIs for Observability and Observer Design Matthew M. Peet Arizona State University Lecture 06: LMIs for Observability and Observer Design Observability Consider a system with no input: ẋ(t) = Ax(t), x(0)
Oxidation and Reduction. Oxidation and Reduction
 Oxidation and Reduction ϒ When an element loses an electron, the process is called oxidation: Na(s) Na + (aq) + e - ϒ The net charge on an atom is called its oxidation state in this case, Na(s) has an
Oxidation and Reduction ϒ When an element loses an electron, the process is called oxidation: Na(s) Na + (aq) + e - ϒ The net charge on an atom is called its oxidation state in this case, Na(s) has an
Linear System Theory
 Linear System Theory Wonhee Kim Chapter 6: Controllability & Observability Chapter 7: Minimal Realizations May 2, 217 1 / 31 Recap State space equation Linear Algebra Solutions of LTI and LTV system Stability
Linear System Theory Wonhee Kim Chapter 6: Controllability & Observability Chapter 7: Minimal Realizations May 2, 217 1 / 31 Recap State space equation Linear Algebra Solutions of LTI and LTV system Stability
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
Optimizing Economic Performance using Model Predictive Control
 Optimizing Economic Performance using Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering Second Workshop on Computational Issues in Nonlinear Control Monterey,
Optimizing Economic Performance using Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering Second Workshop on Computational Issues in Nonlinear Control Monterey,