Semismooth Hybrid Systems. Paul I. Barton and Mehmet Yunt Process Systems Engineering Laboratory Massachusetts Institute of Technology
|
|
|
- Baldwin Hutchinson
- 5 years ago
- Views:
Transcription
1 Semismooth Hybrid Systems Paul I. Barton and Mehmet Yunt Process Systems Engineering Laboratory Massachusetts Institute of Technology
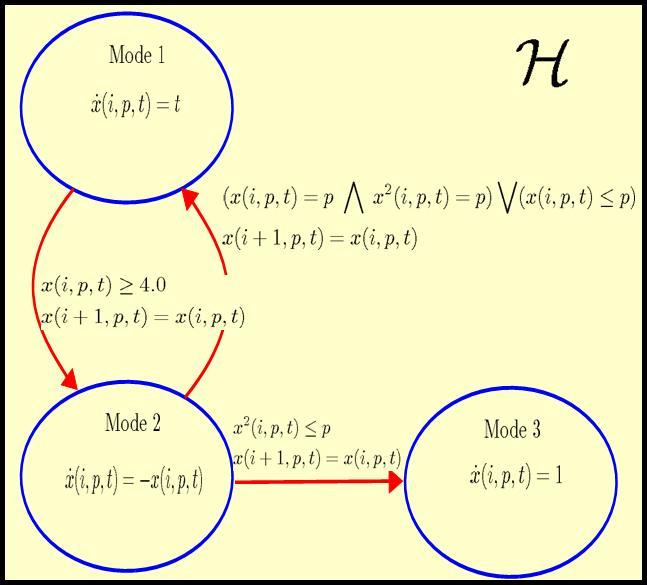
2 Continuous Time Hybrid Automaton (deterministic) 4/21
3 Hybrid Automaton Epoch and Mode Sequences Epoch 1 Mode 1 Mode 2 Epoch 3 Epoch 2
4 Control Parameterization
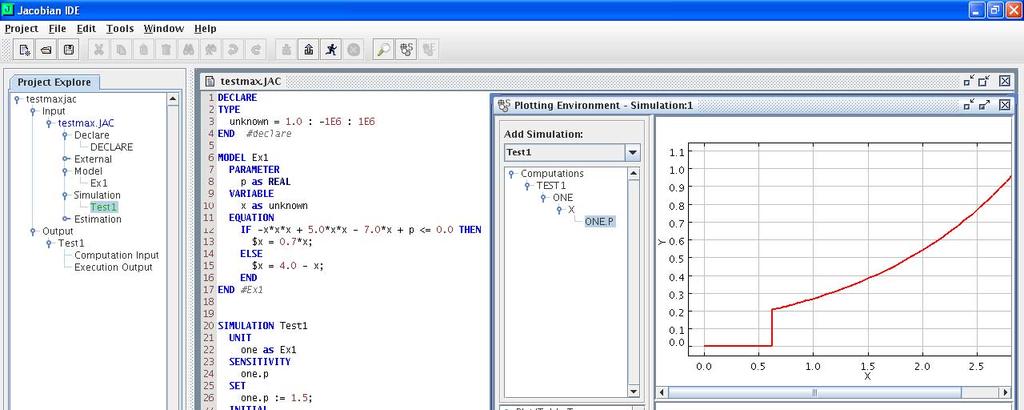
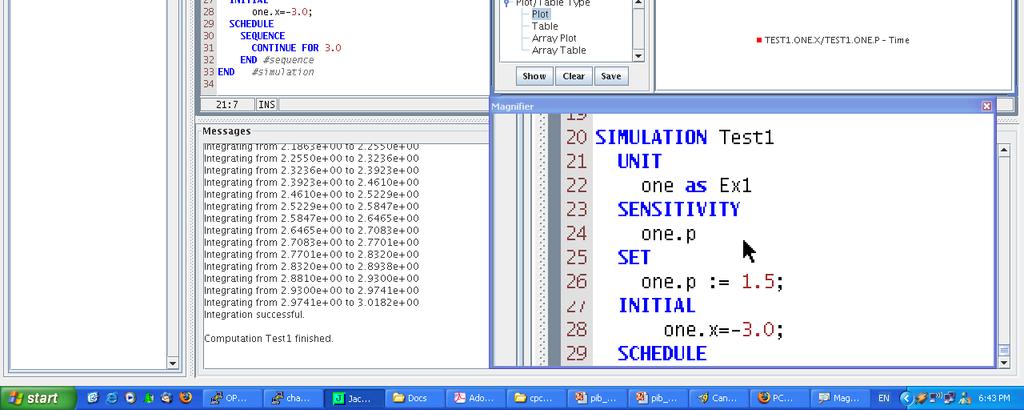
5 Jacobian
6 Nonsmoothness Example 6/21
7 Nonsmoothness Example
8 Discontinuous Example
9 Discontinuous Example
10 Classification of Optimization Problems with Hybrid Systems Embedded Mode sequence does not vary - usually smooth multi-stage dynamic optimization Semismooth hybrid systems nonsmooth, mode sequence can vary Continuous but not semismooth hybrid systems Discontinuous hybrid systems

11 Nonsmooth Analysis Locally Lipschitz Continuous Functions


12 Nonsmooth Analysis: Generalized Gradient Differentiable functions gradients Convex functions subdifferentials Locally Lipschitz continuous functions generalized gradient* *F. H. Clarke, Optimization and Nonsmooth Analysis, Classics in Applied Mathematics 5, SIAM, 1990


13 Nonsmooth Analysis: Calculation of the Generalized Gradient
14 Nonsmooth Analysis: Optimization using Generalized Gradients

15 Nonsmooth Analysis: Descent Direction Main issue: the whole generalized gradient usually cannot be calculated.
16 Nonsmooth Optimization: Bundle Methods 1,2 Question: How do we obtain a direction of descent given only an element of the generalized gradient and the objective value at x? Answer: Keep a set of auxiliary points close to x called the bundle. Create a piecewise linear approximation of the generalized directional derivative at x using the bundle and improve the approximation if necessary. Calculate an approximation to the generalized gradient using the piecewise linear approximation. Calculate a direction of descent for the piecewise linear approximation Update the bundle as necessary. Bundle methods require the existence of the directional derivative with certain continuity properties w.r.t. to the direction (semismoothness) for convergence Nonsmooth Optimization, Analysis and Algorithms and Applications to Optimal Control, Marko Makela and Pekka Neittaanmaki, World Scientific, Singapore, Krzysztof C. Kiwiel, Methods of Descent for Nondifferentiable Optimization, Lecture Notes in Mathematics, no. 1133, Springer-Verlag, Berlin, R. Mifflin, Semismooth and Semiconvex Functions in Constrained Optimization, SIAM Journal of Control and Optimization, vol. 15, no. 6, pp , November 1977.
17 Semismooth Hybrid Systems Under which assumptions are the states of the hybrid system semismooth mappings of the parameters and time? Two distinct classes: Class A: Continuous Vector Field Across Transitions Class B: Discontinuous Vector Field Across Transitions
18 Semismooth Hybrid Systems: Class A Class A Semismooth Hybrid Systems: Reset functions are identities All functions are continuously differentiable w.r.t. parameters and states A single continuous vector field can be constructed on the product space of states and parameters irrespective of modes The dynamics do not explicitly depend on time Transitions have a reversible nature. Transitions depend on parameters and states As a consequence, the states are locally Lipschitz continuous and semismooth functions with respect to the parameters
19 Class A Semismooth Hybrid Systems Tumor Chemotherapy Example 1 This hybrid system satisfies the conditions to be a class A semismooth hybrid system 1. Model modified from J. C. Panetta & J. Adam, A mathematical model of cycle-specific chemotherapy. Mathematical and Computer Modeling, 22, 67-82, 1995
20 Class A Semismooth Hybrid Systems Flux Balance Analysis Models I R4 R1 R3 X Y Z R2 R5 Metabolism Chemical Reactions Internal External R1 X Y R4 X R2 Y X R5 -Z R3 Y Z R1 R2 R3 R4 R5 X Y Z Stoichiometry Matrix, A
21 Class A Semismooth Hybrid Systems Flux Balance Analysis Models II Reactions inside the organism occur at a very fast time scale: quasi steady-state approximation Steady-state does not determine all fluxes uniquely The metabolism can be formulated as a linear program where the metabolism is assumed to optimize an objective (e.g., growth of biomass) The linear program is solved to determine the fluxes
22 Class A Semismooth Hybrid Systems Flux Balance Analysis Models III The dynamics of the mass of external chemical species and reaction volume are:
23 Class A Semismooth Hybrid Systems Flux Balance Analysis Models IV Flux Balance Models can be analyzed as hybrid systems The discrete state is determined by the embedded linear program Substitute with equivalent KKT conditions to yield a complementarity system The solution of the linear program is determined by a selection of columns of the stoichiometry matrix Each selection represents a potential discrete state There are exponentially many discrete states, hence mixed-integer reformulations are not practical
24 Semismooth Hybrid Systems: Class A Flux Balance Analysis Models V v and b are locally Lipschitz continuous functions of their bounds. States are locally Lipschitz continuous and semismooth functions of the parameters and time. Assumptions The linear program has always a unique solution for the elements of v and b of interest, f, v L, v U, b L, b U are continuously differentiable functions of their arguments.
25 Class A Semismooth Hybrid Systems Flux Balance Analysis Models VI: S. Cerevisiae


26 Class A Semismooth Hybrid Systems Flux Balance Analysis Models VII: S. Cerevisiae* Ethanol membrane exchange rate and biomass production rate as functions of the glucose and oxygen membrane exchange bounds * FBA model courtesy of Jared Hjersted and Professor Michael A. Henson, University of Massachusetts, Amherst


27 Class A Semismooth Hybrid Systems Flux Balance Analysis Models VIII: S. Cerevisiae The biomass and ethanol concentrations after 1 hour for different feed rates and oxygen concentrations.
28 Class B Semismooth Hybrid Systems Restrictions on the structure of the hybrid system A subset of the states which have identity resets across all transitions is considered in objective function and constraints All functions are continuously differentiable w.r.t. parameters and states The vector fields may be discontinuous across transitions The initial discrete state is not a function of the parameters and initial continuous state cannot trigger an event at the initial time Events occur when the evolution of the continuous state reaches non-intersecting smooth surfaces in the state space Intersection of these surfaces is only allowed if all intersecting surfaces correspond to transitions to the same mode

29 Class B Semismooth Hybrid Systems Restrictions on the execution of the hybrid system No Zeno or deadlock phenomena Transversality condition: when the continuous evolution reaches an event triggering surface, it does so non-tangentially to the surface

30 Class B Semismooth Hybrid Systems Flux Balance Analysis Models IX A change in the stoichiometry matrix or the objective for a FBA model can also be analyzed in the framework of hybrid systems Local Lipschitz continuity and semismoothness can be recovered if the transitions and events satisfy conditions for class B systems
31 Class B Semismooth Hybrid Systems Diver Example I
32 Semismooth Hybrid Systems: Class B: Diver Example II

33 Semismooth Hybrid Systems: Class B: Diver Example III The constraint is nonsmooth. The hybrid system has discontinuous vector fields. There are resetting states. The transitions are not reversible
34 Semismooth Hybrid System: Calculation of an Element of the Generalized Gradient Under the assumptions for semismooth hybrid systems, the following formula is used to calculate an element of the generalized gradient: One of the limits can exactly be calculated with the algorithms used to calculate parametric sensitivities in case the discrete state trajectory is constant I. I. S. Galán, W. F. Feehery, P. I. Barton, "Parametric Sensitivity Functions for Hybrid Discrete/Continuous Systems", Applied Numerical Mathematics, 31(1):17-48, (1999)

35 Semismooth Hybrid Systems: Optimization Once an element of the generalized gradient is obtained, a direct method can be used for optimization
36 Optimization Tumor Chemotherapy Example II The hybrid system satisfies the conditions to be a class A semismooth hybrid system
37 Optimization Tumor Chemotherapy Example III The optimal drug profile for a thirty day treatment is determined using control vector parameterization. The aim is to minimize the number of tumor cells (Q + P) subject to the constraint that the healthy cell population is above a certain number at the end of thirty days. min P( i, p, t ) + Q( i, p, t ) p f st. : Y( i, p, t ) 1 10 p = f f 30 j j { u, u :1, 2,...,30} A t = B j 0 u 20.0 A j 0 u 20.0 B f 6
38 Optimization Tumor Chemotherapy Example IV Exact penalty is used with a freely available bundle solver I. Multi-start is needed due to nonconvexity of the optimization problem. I. Ladislav Lukšan, Jan Vlček, Algorithm 811: NDA: algorithms for nondifferentiable optimization, ACM Transactions on Mathematical Software, 27(2) : , (2001)
39 Optimization Tumor Chemotherapy Example IV Tumor Cell Population and Healthy Cell Population Evolution P +Q Y Initial 1.0e12 1.0e9 Final 1.8e10 1.0e6
40 Optimization Tumor Chemotherapy Example VI Drug A concentration and doses Drug B concentration and doses
41 Optimization Drug doses were obtained in case drug resistance is ignored. Smooth problem solved with SNOPT using multi-start. Doses applied to the original model. P +Q Y Initial 1.0e12 1.0e9 Final (Original) Final (Smooth) 1.8e10 3.9e10 1.0e6 1.0e6
42 Conclusions Finding the optimal mode sequence is a fundamental challenge in the optimization of hybrid systems Broad class of semismooth hybrid systems for which nonsmooth optimization can find optimal mode sequences Mixed-integer formulations also possible Global mixed-integer dynamic optimization
43 Future Work Exploit structure of semismooth hybrid automata in nonsmooth optimization methods Methods for nonsemismooth and discontinuous hybrid automata?

44 THE END

45 Another Simple Example I
46 Another Simple Example II Analysis of the nonsmoothness requires some mathematics: Nonsmooth Analysis.
47 Semismooth Hybrid Systems: Class A: Valves Q is the flow across the valve, pressures P in and P out are the states of the system, valve opening, u, is the parameter. Slight reformulation is necessary to make the equations continuously differentiable at zero pressure difference due to the square root.
48 Semismooth Hybrid Systems: Class A: Models with Friction Certain models with friction are of class A. The friction force is a continuously differentiable function of the states and parameters.
A quasisecant method for minimizing nonsmooth functions
 A quasisecant method for minimizing nonsmooth functions Adil M. Bagirov and Asef Nazari Ganjehlou Centre for Informatics and Applied Optimization, School of Information Technology and Mathematical Sciences,
A quasisecant method for minimizing nonsmooth functions Adil M. Bagirov and Asef Nazari Ganjehlou Centre for Informatics and Applied Optimization, School of Information Technology and Mathematical Sciences,
Nonsmooth Dynamic Optimization of Systems with Varying Structure. Mehmet Yunt
 Nonsmooth Dynamic Optimization of Systems with Varying Structure by Mehmet Yunt Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of Doctor
Nonsmooth Dynamic Optimization of Systems with Varying Structure by Mehmet Yunt Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of Doctor
ON A CLASS OF NONSMOOTH COMPOSITE FUNCTIONS
 MATHEMATICS OF OPERATIONS RESEARCH Vol. 28, No. 4, November 2003, pp. 677 692 Printed in U.S.A. ON A CLASS OF NONSMOOTH COMPOSITE FUNCTIONS ALEXANDER SHAPIRO We discuss in this paper a class of nonsmooth
MATHEMATICS OF OPERATIONS RESEARCH Vol. 28, No. 4, November 2003, pp. 677 692 Printed in U.S.A. ON A CLASS OF NONSMOOTH COMPOSITE FUNCTIONS ALEXANDER SHAPIRO We discuss in this paper a class of nonsmooth
Sensitivity Analysis for Nonsmooth Dynamic Systems. Kamil Ahmad Khan
 Sensitivity Analysis for Nonsmooth Dynamic Systems by Kamil Ahmad Khan B.S.E., Chemical Engineering, Princeton University (2009) M.S. Chemical Engineering Practice, Massachusetts Institute of Technology
Sensitivity Analysis for Nonsmooth Dynamic Systems by Kamil Ahmad Khan B.S.E., Chemical Engineering, Princeton University (2009) M.S. Chemical Engineering Practice, Massachusetts Institute of Technology
Hybrid Systems - Lecture n. 3 Lyapunov stability
 OUTLINE Focus: stability of equilibrium point Hybrid Systems - Lecture n. 3 Lyapunov stability Maria Prandini DEI - Politecnico di Milano E-mail: prandini@elet.polimi.it continuous systems decribed by
OUTLINE Focus: stability of equilibrium point Hybrid Systems - Lecture n. 3 Lyapunov stability Maria Prandini DEI - Politecnico di Milano E-mail: prandini@elet.polimi.it continuous systems decribed by
A Continuation Method for the Solution of Monotone Variational Inequality Problems
 A Continuation Method for the Solution of Monotone Variational Inequality Problems Christian Kanzow Institute of Applied Mathematics University of Hamburg Bundesstrasse 55 D 20146 Hamburg Germany e-mail:
A Continuation Method for the Solution of Monotone Variational Inequality Problems Christian Kanzow Institute of Applied Mathematics University of Hamburg Bundesstrasse 55 D 20146 Hamburg Germany e-mail:
Algorithms for Nonsmooth Optimization
 Algorithms for Nonsmooth Optimization Frank E. Curtis, Lehigh University presented at Center for Optimization and Statistical Learning, Northwestern University 2 March 2018 Algorithms for Nonsmooth Optimization
Algorithms for Nonsmooth Optimization Frank E. Curtis, Lehigh University presented at Center for Optimization and Statistical Learning, Northwestern University 2 March 2018 Algorithms for Nonsmooth Optimization
Limited Memory Bundle Algorithm for Large Bound Constrained Nonsmooth Minimization Problems
 Reports of the Department of Mathematical Information Technology Series B. Scientific Computing No. B. 1/2006 Limited Memory Bundle Algorithm for Large Bound Constrained Nonsmooth Minimization Problems
Reports of the Department of Mathematical Information Technology Series B. Scientific Computing No. B. 1/2006 Limited Memory Bundle Algorithm for Large Bound Constrained Nonsmooth Minimization Problems
Introduction. New Nonsmooth Trust Region Method for Unconstraint Locally Lipschitz Optimization Problems
 New Nonsmooth Trust Region Method for Unconstraint Locally Lipschitz Optimization Problems Z. Akbari 1, R. Yousefpour 2, M. R. Peyghami 3 1 Department of Mathematics, K.N. Toosi University of Technology,
New Nonsmooth Trust Region Method for Unconstraint Locally Lipschitz Optimization Problems Z. Akbari 1, R. Yousefpour 2, M. R. Peyghami 3 1 Department of Mathematics, K.N. Toosi University of Technology,
Marjo Haarala. Large-Scale Nonsmooth Optimization
 JYVÄSKYLÄ STUDIES IN COMPUTING 40 Marjo Haarala Large-Scale Nonsmooth Optimization Variable Metric Bundle Method with Limited Memory Esitetään Jyväskylän yliopiston informaatioteknologian tiedekunnan suostumuksella
JYVÄSKYLÄ STUDIES IN COMPUTING 40 Marjo Haarala Large-Scale Nonsmooth Optimization Variable Metric Bundle Method with Limited Memory Esitetään Jyväskylän yliopiston informaatioteknologian tiedekunnan suostumuksella
Hybrid Systems Course Lyapunov stability
 Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
ON GAP FUNCTIONS OF VARIATIONAL INEQUALITY IN A BANACH SPACE. Sangho Kum and Gue Myung Lee. 1. Introduction
 J. Korean Math. Soc. 38 (2001), No. 3, pp. 683 695 ON GAP FUNCTIONS OF VARIATIONAL INEQUALITY IN A BANACH SPACE Sangho Kum and Gue Myung Lee Abstract. In this paper we are concerned with theoretical properties
J. Korean Math. Soc. 38 (2001), No. 3, pp. 683 695 ON GAP FUNCTIONS OF VARIATIONAL INEQUALITY IN A BANACH SPACE Sangho Kum and Gue Myung Lee Abstract. In this paper we are concerned with theoretical properties
Comparison of formulations and solution methods for image restoration problems
 INSTITUTE OF PHYSICS PUBLISHING Inverse Problems 7 (2) 977 995 INVERSE PROBLEMS PII: S266-56()2336-7 Comparison of formulations and solution methods for image restoration problems Tommi Kärkkäinen, Kirsi
INSTITUTE OF PHYSICS PUBLISHING Inverse Problems 7 (2) 977 995 INVERSE PROBLEMS PII: S266-56()2336-7 Comparison of formulations and solution methods for image restoration problems Tommi Kärkkäinen, Kirsi
On Second-order Properties of the Moreau-Yosida Regularization for Constrained Nonsmooth Convex Programs
 On Second-order Properties of the Moreau-Yosida Regularization for Constrained Nonsmooth Convex Programs Fanwen Meng,2 ; Gongyun Zhao Department of Mathematics National University of Singapore 2 Science
On Second-order Properties of the Moreau-Yosida Regularization for Constrained Nonsmooth Convex Programs Fanwen Meng,2 ; Gongyun Zhao Department of Mathematics National University of Singapore 2 Science
Lehrstuhl B für Mechanik Technische Universität München D Garching Germany
 DISPLACEMENT POTENTIALS IN NON-SMOOTH DYNAMICS CH. GLOCKER Lehrstuhl B für Mechanik Technische Universität München D-85747 Garching Germany Abstract. The paper treats the evaluation of the accelerations
DISPLACEMENT POTENTIALS IN NON-SMOOTH DYNAMICS CH. GLOCKER Lehrstuhl B für Mechanik Technische Universität München D-85747 Garching Germany Abstract. The paper treats the evaluation of the accelerations
MS&E 318 (CME 338) Large-Scale Numerical Optimization
 Large-Scale Numerical Optimization") Stanford University, Management Science & Engineering (and ICME) MS&E 318 (CME 338) Large-Scale Numerical Optimization 1 Origins Instructor: Michael Saunders Spring 2015 Notes 9: Augmented Lagrangian Methods
Stanford University, Management Science & Engineering (and ICME) MS&E 318 (CME 338) Large-Scale Numerical Optimization 1 Origins Instructor: Michael Saunders Spring 2015 Notes 9: Augmented Lagrangian Methods
A level set method for solving free boundary problems associated with obstacles
 A level set method for solving free boundary problems associated with obstacles K. Majava University of Jyväskylä, Department of Mathematical Information Technology, P.O. Box 35 (Agora), FIN-44 University
A level set method for solving free boundary problems associated with obstacles K. Majava University of Jyväskylä, Department of Mathematical Information Technology, P.O. Box 35 (Agora), FIN-44 University
On Nesterov s Random Coordinate Descent Algorithms - Continued
 On Nesterov s Random Coordinate Descent Algorithms - Continued Zheng Xu University of Texas At Arlington February 20, 2015 1 Revisit Random Coordinate Descent The Random Coordinate Descent Upper and Lower
On Nesterov s Random Coordinate Descent Algorithms - Continued Zheng Xu University of Texas At Arlington February 20, 2015 1 Revisit Random Coordinate Descent The Random Coordinate Descent Upper and Lower
On the Inherent Robustness of Suboptimal Model Predictive Control
 On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical and Biological Engineering and Computer
On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical and Biological Engineering and Computer
Lecture 6: September 17
 10-725/36-725: Convex Optimization Fall 2015 Lecturer: Ryan Tibshirani Lecture 6: September 17 Scribes: Scribes: Wenjun Wang, Satwik Kottur, Zhiding Yu Note: LaTeX template courtesy of UC Berkeley EECS
10-725/36-725: Convex Optimization Fall 2015 Lecturer: Ryan Tibshirani Lecture 6: September 17 Scribes: Scribes: Wenjun Wang, Satwik Kottur, Zhiding Yu Note: LaTeX template courtesy of UC Berkeley EECS
The nonsmooth Newton method on Riemannian manifolds
 The nonsmooth Newton method on Riemannian manifolds C. Lageman, U. Helmke, J.H. Manton 1 Introduction Solving nonlinear equations in Euclidean space is a frequently occurring problem in optimization and
The nonsmooth Newton method on Riemannian manifolds C. Lageman, U. Helmke, J.H. Manton 1 Introduction Solving nonlinear equations in Euclidean space is a frequently occurring problem in optimization and
EE291E Lecture Notes 3 Autonomous Hybrid Automata
 EE9E Lecture Notes 3 Autonomous Hybrid Automata Claire J. Tomlin January, 8 The lecture notes for this course are based on the first draft of a research monograph: Hybrid Systems. The monograph is copyright
EE9E Lecture Notes 3 Autonomous Hybrid Automata Claire J. Tomlin January, 8 The lecture notes for this course are based on the first draft of a research monograph: Hybrid Systems. The monograph is copyright
LIMITED MEMORY BUNDLE METHOD FOR LARGE BOUND CONSTRAINED NONSMOOTH OPTIMIZATION: CONVERGENCE ANALYSIS
 LIMITED MEMORY BUNDLE METHOD FOR LARGE BOUND CONSTRAINED NONSMOOTH OPTIMIZATION: CONVERGENCE ANALYSIS Napsu Karmitsa 1 Marko M. Mäkelä 2 Department of Mathematics, University of Turku, FI-20014 Turku,
LIMITED MEMORY BUNDLE METHOD FOR LARGE BOUND CONSTRAINED NONSMOOTH OPTIMIZATION: CONVERGENCE ANALYSIS Napsu Karmitsa 1 Marko M. Mäkelä 2 Department of Mathematics, University of Turku, FI-20014 Turku,
Newton-type Methods for Solving the Nonsmooth Equations with Finitely Many Maximum Functions
 260 Journal of Advances in Applied Mathematics, Vol. 1, No. 4, October 2016 https://dx.doi.org/10.22606/jaam.2016.14006 Newton-type Methods for Solving the Nonsmooth Equations with Finitely Many Maximum
260 Journal of Advances in Applied Mathematics, Vol. 1, No. 4, October 2016 https://dx.doi.org/10.22606/jaam.2016.14006 Newton-type Methods for Solving the Nonsmooth Equations with Finitely Many Maximum
Research Article Sufficient Optimality and Sensitivity Analysis of a Parameterized Min-Max Programming
 Applied Mathematics Volume 2012, Article ID 692325, 9 pages doi:10.1155/2012/692325 Research Article Sufficient Optimality and Sensitivity Analysis of a Parameterized Min-Max Programming Huijuan Xiong,
Applied Mathematics Volume 2012, Article ID 692325, 9 pages doi:10.1155/2012/692325 Research Article Sufficient Optimality and Sensitivity Analysis of a Parameterized Min-Max Programming Huijuan Xiong,
Comparison of Modern Stochastic Optimization Algorithms
 Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Inverse Problems and Optimal Design in Electricity and Magnetism
 Inverse Problems and Optimal Design in Electricity and Magnetism P. Neittaanmäki Department of Mathematics, University of Jyväskylä M. Rudnicki Institute of Electrical Engineering, Warsaw and A. Savini
Inverse Problems and Optimal Design in Electricity and Magnetism P. Neittaanmäki Department of Mathematics, University of Jyväskylä M. Rudnicki Institute of Electrical Engineering, Warsaw and A. Savini
A second order primal-dual algorithm for nonsmooth convex composite optimization
 2017 IEEE 56th Annual Conference on Decision and Control (CDC) December 12-15, 2017, Melbourne, Australia A second order primal-dual algorithm for nonsmooth convex composite optimization Neil K. Dhingra,
2017 IEEE 56th Annual Conference on Decision and Control (CDC) December 12-15, 2017, Melbourne, Australia A second order primal-dual algorithm for nonsmooth convex composite optimization Neil K. Dhingra,
Introduction. A Modified Steepest Descent Method Based on BFGS Method for Locally Lipschitz Functions. R. Yousefpour 1
 A Modified Steepest Descent Method Based on BFGS Method for Locally Lipschitz Functions R. Yousefpour 1 1 Department Mathematical Sciences, University of Mazandaran, Babolsar, Iran; yousefpour@umz.ac.ir
A Modified Steepest Descent Method Based on BFGS Method for Locally Lipschitz Functions R. Yousefpour 1 1 Department Mathematical Sciences, University of Mazandaran, Babolsar, Iran; yousefpour@umz.ac.ir
ON REGULARITY CONDITIONS FOR COMPLEMENTARITY PROBLEMS
 ON REGULARITY CONDITIONS FOR COMPLEMENTARITY PROBLEMS A. F. Izmailov and A. S. Kurennoy December 011 ABSTRACT In the context of mixed complementarity problems various concepts of solution regularity are
ON REGULARITY CONDITIONS FOR COMPLEMENTARITY PROBLEMS A. F. Izmailov and A. S. Kurennoy December 011 ABSTRACT In the context of mixed complementarity problems various concepts of solution regularity are
Generalized Derivatives for Solutions of Parametric Ordinary Differential Equations with Non-differentiable Right-Hand Sides
 Generalized Derivatives for Solutions of Parametric Ordinary Differential Equations with Non-differentiable Right-Hand Sides The MIT Faculty has made this article openly available. Please share how this
Generalized Derivatives for Solutions of Parametric Ordinary Differential Equations with Non-differentiable Right-Hand Sides The MIT Faculty has made this article openly available. Please share how this
A globally and R-linearly convergent hybrid HS and PRP method and its inexact version with applications
 A globally and R-linearly convergent hybrid HS and PRP method and its inexact version with applications Weijun Zhou 28 October 20 Abstract A hybrid HS and PRP type conjugate gradient method for smooth
A globally and R-linearly convergent hybrid HS and PRP method and its inexact version with applications Weijun Zhou 28 October 20 Abstract A hybrid HS and PRP type conjugate gradient method for smooth
AN INTERIOR-POINT METHOD FOR NONLINEAR OPTIMIZATION PROBLEMS WITH LOCATABLE AND SEPARABLE NONSMOOTHNESS
 AN INTERIOR-POINT METHOD FOR NONLINEAR OPTIMIZATION PROBLEMS WITH LOCATABLE AND SEPARABLE NONSMOOTHNESS MARTIN SCHMIDT Abstract. Many real-world optimization models comse nonconvex and nonlinear as well
AN INTERIOR-POINT METHOD FOR NONLINEAR OPTIMIZATION PROBLEMS WITH LOCATABLE AND SEPARABLE NONSMOOTHNESS MARTIN SCHMIDT Abstract. Many real-world optimization models comse nonconvex and nonlinear as well
STABILITY ANALYSIS AND CONTROL DESIGN
 STABILITY ANALYSIS AND CONTROL DESIGN WITH IMPACTS AND FRICTION Michael Posa Massachusetts Institute of Technology Collaboration with Mark Tobenkin and Russ Tedrake ICRA Workshop on Robust Optimization-Based
STABILITY ANALYSIS AND CONTROL DESIGN WITH IMPACTS AND FRICTION Michael Posa Massachusetts Institute of Technology Collaboration with Mark Tobenkin and Russ Tedrake ICRA Workshop on Robust Optimization-Based
LCPI method to find optimal solutions of nonlinear programming problems
 ISSN 1 746-7233, Engl, UK World Journal of Modelling Simulation Vol. 14 2018) No. 1, pp. 50-57 LCPI method to find optimal solutions of nonlinear programming problems M.H. Noori Skari, M. Ghaznavi * Faculty
ISSN 1 746-7233, Engl, UK World Journal of Modelling Simulation Vol. 14 2018) No. 1, pp. 50-57 LCPI method to find optimal solutions of nonlinear programming problems M.H. Noori Skari, M. Ghaznavi * Faculty
Dynamical Systems Revisited: Hybrid Systems with Zeno Executions
 Dynamical Systems Revisited: Hybrid Systems with Zeno Executions Jun Zhang, Karl Henrik Johansson, John Lygeros, and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
Dynamical Systems Revisited: Hybrid Systems with Zeno Executions Jun Zhang, Karl Henrik Johansson, John Lygeros, and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
University of California. Berkeley, CA fzhangjun johans lygeros Abstract
 Dynamical Systems Revisited: Hybrid Systems with Zeno Executions Jun Zhang, Karl Henrik Johansson y, John Lygeros, and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
Dynamical Systems Revisited: Hybrid Systems with Zeno Executions Jun Zhang, Karl Henrik Johansson y, John Lygeros, and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
FIXED POINTS IN THE FAMILY OF CONVEX REPRESENTATIONS OF A MAXIMAL MONOTONE OPERATOR
 PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 FIXED POINTS IN THE FAMILY OF CONVEX REPRESENTATIONS OF A MAXIMAL MONOTONE OPERATOR B. F. SVAITER
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 FIXED POINTS IN THE FAMILY OF CONVEX REPRESENTATIONS OF A MAXIMAL MONOTONE OPERATOR B. F. SVAITER
A COMPARATIVE STUDY ON OPTIMIZATION METHODS FOR THE CONSTRAINED NONLINEAR PROGRAMMING PROBLEMS
 A COMPARATIVE STUDY ON OPTIMIZATION METHODS FOR THE CONSTRAINED NONLINEAR PROGRAMMING PROBLEMS OZGUR YENIAY Received 2 August 2004 and in revised form 12 November 2004 Constrained nonlinear programming
A COMPARATIVE STUDY ON OPTIMIZATION METHODS FOR THE CONSTRAINED NONLINEAR PROGRAMMING PROBLEMS OZGUR YENIAY Received 2 August 2004 and in revised form 12 November 2004 Constrained nonlinear programming
APPROXIMATING SUBDIFFERENTIALS BY RANDOM SAMPLING OF GRADIENTS
 MATHEMATICS OF OPERATIONS RESEARCH Vol. 27, No. 3, August 2002, pp. 567 584 Printed in U.S.A. APPROXIMATING SUBDIFFERENTIALS BY RANDOM SAMPLING OF GRADIENTS J. V. BURKE, A. S. LEWIS, and M. L. OVERTON
MATHEMATICS OF OPERATIONS RESEARCH Vol. 27, No. 3, August 2002, pp. 567 584 Printed in U.S.A. APPROXIMATING SUBDIFFERENTIALS BY RANDOM SAMPLING OF GRADIENTS J. V. BURKE, A. S. LEWIS, and M. L. OVERTON
A CHARACTERIZATION OF STRICT LOCAL MINIMIZERS OF ORDER ONE FOR STATIC MINMAX PROBLEMS IN THE PARAMETRIC CONSTRAINT CASE
 Journal of Applied Analysis Vol. 6, No. 1 (2000), pp. 139 148 A CHARACTERIZATION OF STRICT LOCAL MINIMIZERS OF ORDER ONE FOR STATIC MINMAX PROBLEMS IN THE PARAMETRIC CONSTRAINT CASE A. W. A. TAHA Received
Journal of Applied Analysis Vol. 6, No. 1 (2000), pp. 139 148 A CHARACTERIZATION OF STRICT LOCAL MINIMIZERS OF ORDER ONE FOR STATIC MINMAX PROBLEMS IN THE PARAMETRIC CONSTRAINT CASE A. W. A. TAHA Received
Coordinate Update Algorithm Short Course Subgradients and Subgradient Methods
 Coordinate Update Algorithm Short Course Subgradients and Subgradient Methods Instructor: Wotao Yin (UCLA Math) Summer 2016 1 / 30 Notation f : H R { } is a closed proper convex function domf := {x R n
Coordinate Update Algorithm Short Course Subgradients and Subgradient Methods Instructor: Wotao Yin (UCLA Math) Summer 2016 1 / 30 Notation f : H R { } is a closed proper convex function domf := {x R n
Spectral gradient projection method for solving nonlinear monotone equations
 Journal of Computational and Applied Mathematics 196 (2006) 478 484 www.elsevier.com/locate/cam Spectral gradient projection method for solving nonlinear monotone equations Li Zhang, Weijun Zhou Department
Journal of Computational and Applied Mathematics 196 (2006) 478 484 www.elsevier.com/locate/cam Spectral gradient projection method for solving nonlinear monotone equations Li Zhang, Weijun Zhou Department
Journal of Convex Analysis (accepted for publication) A HYBRID PROJECTION PROXIMAL POINT ALGORITHM. M. V. Solodov and B. F.
 A HYBRID PROJECTION PROXIMAL POINT ALGORITHM. M. V. Solodov and B. F.") Journal of Convex Analysis (accepted for publication) A HYBRID PROJECTION PROXIMAL POINT ALGORITHM M. V. Solodov and B. F. Svaiter January 27, 1997 (Revised August 24, 1998) ABSTRACT We propose a modification
Journal of Convex Analysis (accepted for publication) A HYBRID PROJECTION PROXIMAL POINT ALGORITHM M. V. Solodov and B. F. Svaiter January 27, 1997 (Revised August 24, 1998) ABSTRACT We propose a modification
Lecture 19 Algorithms for VIs KKT Conditions-based Ideas. November 16, 2008
 Lecture 19 Algorithms for VIs KKT Conditions-based Ideas November 16, 2008 Outline for solution of VIs Algorithms for general VIs Two basic approaches: First approach reformulates (and solves) the KKT
Lecture 19 Algorithms for VIs KKT Conditions-based Ideas November 16, 2008 Outline for solution of VIs Algorithms for general VIs Two basic approaches: First approach reformulates (and solves) the KKT
Nonsmooth analysis of connected oil well system
 Nonsmooth analysis of connected oil well system Marius Reed December 9, 27 TKP458 - Chemical Engineering, Specialization Project Department of chemical engineering Norwegian University of Science and Technology
Nonsmooth analysis of connected oil well system Marius Reed December 9, 27 TKP458 - Chemical Engineering, Specialization Project Department of chemical engineering Norwegian University of Science and Technology
Subgradient Method. Ryan Tibshirani Convex Optimization
 Subgradient Method Ryan Tibshirani Convex Optimization 10-725 Consider the problem Last last time: gradient descent min x f(x) for f convex and differentiable, dom(f) = R n. Gradient descent: choose initial
Subgradient Method Ryan Tibshirani Convex Optimization 10-725 Consider the problem Last last time: gradient descent min x f(x) for f convex and differentiable, dom(f) = R n. Gradient descent: choose initial
ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION. 1. Introduction. f 0 (x)
") ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION JIAWANG NIE AND KRISTIAN RANESTAD Abstract. Consider the polynomial optimization problem whose objective and constraints are all described by multivariate polynomials.
ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION JIAWANG NIE AND KRISTIAN RANESTAD Abstract. Consider the polynomial optimization problem whose objective and constraints are all described by multivariate polynomials.
AN ELECTRIC circuit containing a switch controlled by
 878 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: ANALOG AND DIGITAL SIGNAL PROCESSING, VOL. 46, NO. 7, JULY 1999 Bifurcation of Switched Nonlinear Dynamical Systems Takuji Kousaka, Member, IEEE, Tetsushi
878 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: ANALOG AND DIGITAL SIGNAL PROCESSING, VOL. 46, NO. 7, JULY 1999 Bifurcation of Switched Nonlinear Dynamical Systems Takuji Kousaka, Member, IEEE, Tetsushi
Kaisa Joki Adil M. Bagirov Napsu Karmitsa Marko M. Mäkelä. New Proximal Bundle Method for Nonsmooth DC Optimization
 Kaisa Joki Adil M. Bagirov Napsu Karmitsa Marko M. Mäkelä New Proximal Bundle Method for Nonsmooth DC Optimization TUCS Technical Report No 1130, February 2015 New Proximal Bundle Method for Nonsmooth
Kaisa Joki Adil M. Bagirov Napsu Karmitsa Marko M. Mäkelä New Proximal Bundle Method for Nonsmooth DC Optimization TUCS Technical Report No 1130, February 2015 New Proximal Bundle Method for Nonsmooth
LARGE SCALE NONLINEAR OPTIMIZATION
 Ettore Majorana Centre for Scientific Culture International School of Mathematics G. Stampacchia Erice, Italy 40th Workshop LARGE SCALE NONLINEAR OPTIMIZATION 22 June - 1 July 2004. ABSTRACTS of the invited
Ettore Majorana Centre for Scientific Culture International School of Mathematics G. Stampacchia Erice, Italy 40th Workshop LARGE SCALE NONLINEAR OPTIMIZATION 22 June - 1 July 2004. ABSTRACTS of the invited
Embedded Systems 5. Synchronous Composition. Lee/Seshia Section 6.2
 Embedded Systems 5-1 - Synchronous Composition Lee/Seshia Section 6.2 Important semantic model for concurrent composition Here: composition of actors Foundation of Statecharts, Simulink, synchronous programming
Embedded Systems 5-1 - Synchronous Composition Lee/Seshia Section 6.2 Important semantic model for concurrent composition Here: composition of actors Foundation of Statecharts, Simulink, synchronous programming
Strategies for Numerical Integration of Discontinuous DAE Models
 European Symposium on Computer Arded Aided Process Engineering 15 L. Puigjaner and A. Espuña (Editors) 25 Elsevier Science B.V. All rights reserved. Strategies for Numerical Integration of Discontinuous
European Symposium on Computer Arded Aided Process Engineering 15 L. Puigjaner and A. Espuña (Editors) 25 Elsevier Science B.V. All rights reserved. Strategies for Numerical Integration of Discontinuous
Sliding Modes in Control and Optimization
 Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
Convergence of Stationary Points of Sample Average Two-Stage Stochastic Programs: A Generalized Equation Approach
 MATHEMATICS OF OPERATIONS RESEARCH Vol. 36, No. 3, August 2011, pp. 568 592 issn 0364-765X eissn 1526-5471 11 3603 0568 doi 10.1287/moor.1110.0506 2011 INFORMS Convergence of Stationary Points of Sample
MATHEMATICS OF OPERATIONS RESEARCH Vol. 36, No. 3, August 2011, pp. 568 592 issn 0364-765X eissn 1526-5471 11 3603 0568 doi 10.1287/moor.1110.0506 2011 INFORMS Convergence of Stationary Points of Sample
PDE-Constrained and Nonsmooth Optimization
 Frank E. Curtis October 1, 2009 Outline PDE-Constrained Optimization Introduction Newton s method Inexactness Results Summary and future work Nonsmooth Optimization Sequential quadratic programming (SQP)
Frank E. Curtis October 1, 2009 Outline PDE-Constrained Optimization Introduction Newton s method Inexactness Results Summary and future work Nonsmooth Optimization Sequential quadratic programming (SQP)
Numerical optimization
 Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Affine covariant Semi-smooth Newton in function space
 Affine covariant Semi-smooth Newton in function space Anton Schiela March 14, 2018 These are lecture notes of my talks given for the Winter School Modern Methods in Nonsmooth Optimization that was held
Affine covariant Semi-smooth Newton in function space Anton Schiela March 14, 2018 These are lecture notes of my talks given for the Winter School Modern Methods in Nonsmooth Optimization that was held
Convergence of a Gauss Pseudospectral Method for Optimal Control
 Convergence of a Gauss Pseudospectral Method for Optimal Control Hongyan Hou William W. Hager Anil V. Rao A convergence theory is presented for approximations of continuous-time optimal control problems
Convergence of a Gauss Pseudospectral Method for Optimal Control Hongyan Hou William W. Hager Anil V. Rao A convergence theory is presented for approximations of continuous-time optimal control problems
Nonlinear Optimization for Optimal Control
 Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Relationships between upper exhausters and the basic subdifferential in variational analysis
 J. Math. Anal. Appl. 334 (2007) 261 272 www.elsevier.com/locate/jmaa Relationships between upper exhausters and the basic subdifferential in variational analysis Vera Roshchina City University of Hong
J. Math. Anal. Appl. 334 (2007) 261 272 www.elsevier.com/locate/jmaa Relationships between upper exhausters and the basic subdifferential in variational analysis Vera Roshchina City University of Hong
Variational Analysis and Tame Optimization
 Variational Analysis and Tame Optimization Aris Daniilidis http://mat.uab.cat/~arisd Universitat Autònoma de Barcelona April 15 17, 2010 PLAN OF THE TALK Nonsmooth analysis Genericity of pathological situations
Variational Analysis and Tame Optimization Aris Daniilidis http://mat.uab.cat/~arisd Universitat Autònoma de Barcelona April 15 17, 2010 PLAN OF THE TALK Nonsmooth analysis Genericity of pathological situations
SOR- and Jacobi-type Iterative Methods for Solving l 1 -l 2 Problems by Way of Fenchel Duality 1
 SOR- and Jacobi-type Iterative Methods for Solving l 1 -l 2 Problems by Way of Fenchel Duality 1 Masao Fukushima 2 July 17 2010; revised February 4 2011 Abstract We present an SOR-type algorithm and a
SOR- and Jacobi-type Iterative Methods for Solving l 1 -l 2 Problems by Way of Fenchel Duality 1 Masao Fukushima 2 July 17 2010; revised February 4 2011 Abstract We present an SOR-type algorithm and a
Contents. Preface. 1 Introduction Optimization view on mathematical models NLP models, black-box versus explicit expression 3
 Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
One Mirror Descent Algorithm for Convex Constrained Optimization Problems with Non-Standard Growth Properties
 One Mirror Descent Algorithm for Convex Constrained Optimization Problems with Non-Standard Growth Properties Fedor S. Stonyakin 1 and Alexander A. Titov 1 V. I. Vernadsky Crimean Federal University, Simferopol,
One Mirror Descent Algorithm for Convex Constrained Optimization Problems with Non-Standard Growth Properties Fedor S. Stonyakin 1 and Alexander A. Titov 1 V. I. Vernadsky Crimean Federal University, Simferopol,
Primal-dual Subgradient Method for Convex Problems with Functional Constraints
 Primal-dual Subgradient Method for Convex Problems with Functional Constraints Yurii Nesterov, CORE/INMA (UCL) Workshop on embedded optimization EMBOPT2014 September 9, 2014 (Lucca) Yu. Nesterov Primal-dual
Primal-dual Subgradient Method for Convex Problems with Functional Constraints Yurii Nesterov, CORE/INMA (UCL) Workshop on embedded optimization EMBOPT2014 September 9, 2014 (Lucca) Yu. Nesterov Primal-dual
A FRITZ JOHN APPROACH TO FIRST ORDER OPTIMALITY CONDITIONS FOR MATHEMATICAL PROGRAMS WITH EQUILIBRIUM CONSTRAINTS
 A FRITZ JOHN APPROACH TO FIRST ORDER OPTIMALITY CONDITIONS FOR MATHEMATICAL PROGRAMS WITH EQUILIBRIUM CONSTRAINTS Michael L. Flegel and Christian Kanzow University of Würzburg Institute of Applied Mathematics
A FRITZ JOHN APPROACH TO FIRST ORDER OPTIMALITY CONDITIONS FOR MATHEMATICAL PROGRAMS WITH EQUILIBRIUM CONSTRAINTS Michael L. Flegel and Christian Kanzow University of Würzburg Institute of Applied Mathematics
20 J.-S. CHEN, C.-H. KO AND X.-R. WU. : R 2 R is given by. Recently, the generalized Fischer-Burmeister function ϕ p : R2 R, which includes
 016 0 J.-S. CHEN, C.-H. KO AND X.-R. WU whereas the natural residual function ϕ : R R is given by ϕ (a, b) = a (a b) + = min{a, b}. Recently, the generalized Fischer-Burmeister function ϕ p : R R, which
016 0 J.-S. CHEN, C.-H. KO AND X.-R. WU whereas the natural residual function ϕ : R R is given by ϕ (a, b) = a (a b) + = min{a, b}. Recently, the generalized Fischer-Burmeister function ϕ p : R R, which
Motivation Subgradient Method Stochastic Subgradient Method. Convex Optimization. Lecture 15 - Gradient Descent in Machine Learning
 Convex Optimization Lecture 15 - Gradient Descent in Machine Learning Instructor: Yuanzhang Xiao University of Hawaii at Manoa Fall 2017 1 / 21 Today s Lecture 1 Motivation 2 Subgradient Method 3 Stochastic
Convex Optimization Lecture 15 - Gradient Descent in Machine Learning Instructor: Yuanzhang Xiao University of Hawaii at Manoa Fall 2017 1 / 21 Today s Lecture 1 Motivation 2 Subgradient Method 3 Stochastic
Uniqueness of Generalized Equilibrium for Box Constrained Problems and Applications
 Uniqueness of Generalized Equilibrium for Box Constrained Problems and Applications Alp Simsek Department of Electrical Engineering and Computer Science Massachusetts Institute of Technology Asuman E.
Uniqueness of Generalized Equilibrium for Box Constrained Problems and Applications Alp Simsek Department of Electrical Engineering and Computer Science Massachusetts Institute of Technology Asuman E.
Optimality Conditions for Nonsmooth Convex Optimization
 Optimality Conditions for Nonsmooth Convex Optimization Sangkyun Lee Oct 22, 2014 Let us consider a convex function f : R n R, where R is the extended real field, R := R {, + }, which is proper (f never
Optimality Conditions for Nonsmooth Convex Optimization Sangkyun Lee Oct 22, 2014 Let us consider a convex function f : R n R, where R is the extended real field, R := R {, + }, which is proper (f never
4y Springer NONLINEAR INTEGER PROGRAMMING
 NONLINEAR INTEGER PROGRAMMING DUAN LI Department of Systems Engineering and Engineering Management The Chinese University of Hong Kong Shatin, N. T. Hong Kong XIAOLING SUN Department of Mathematics Shanghai
NONLINEAR INTEGER PROGRAMMING DUAN LI Department of Systems Engineering and Engineering Management The Chinese University of Hong Kong Shatin, N. T. Hong Kong XIAOLING SUN Department of Mathematics Shanghai
Multiobjective optimization methods
 Multiobjective optimization methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi spring 2014 TIES483 Nonlinear optimization No-preference methods DM not available (e.g. online optimization)
Multiobjective optimization methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi spring 2014 TIES483 Nonlinear optimization No-preference methods DM not available (e.g. online optimization)
Lecture 25: November 27
 10-725: Optimization Fall 2012 Lecture 25: November 27 Lecturer: Ryan Tibshirani Scribes: Matt Wytock, Supreeth Achar Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
10-725: Optimization Fall 2012 Lecture 25: November 27 Lecturer: Ryan Tibshirani Scribes: Matt Wytock, Supreeth Achar Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
Data Science - Convex optimization and application
 1 Data Science - Convex optimization and application Data Science - Convex optimization and application Summary We begin by some illustrations in challenging topics in modern data science. Then, this session
1 Data Science - Convex optimization and application Data Science - Convex optimization and application Summary We begin by some illustrations in challenging topics in modern data science. Then, this session
On the Inherent Robustness of Suboptimal Model Predictive Control
 On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical & Biological Engineering Computer
On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical & Biological Engineering Computer
Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems
 Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems Thore Graepel and Nicol N. Schraudolph Institute of Computational Science ETH Zürich, Switzerland {graepel,schraudo}@inf.ethz.ch
Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems Thore Graepel and Nicol N. Schraudolph Institute of Computational Science ETH Zürich, Switzerland {graepel,schraudo}@inf.ethz.ch
Subdifferential representation of convex functions: refinements and applications
 Subdifferential representation of convex functions: refinements and applications Joël Benoist & Aris Daniilidis Abstract Every lower semicontinuous convex function can be represented through its subdifferential
Subdifferential representation of convex functions: refinements and applications Joël Benoist & Aris Daniilidis Abstract Every lower semicontinuous convex function can be represented through its subdifferential
A Remark on the Regularity of Solutions of Maxwell s Equations on Lipschitz Domains
 A Remark on the Regularity of Solutions of Maxwell s Equations on Lipschitz Domains Martin Costabel Abstract Let u be a vector field on a bounded Lipschitz domain in R 3, and let u together with its divergence
A Remark on the Regularity of Solutions of Maxwell s Equations on Lipschitz Domains Martin Costabel Abstract Let u be a vector field on a bounded Lipschitz domain in R 3, and let u together with its divergence
Global Optimality Conditions in Maximizing a Convex Quadratic Function under Convex Quadratic Constraints
 Journal of Global Optimization 21: 445 455, 2001. 2001 Kluwer Academic Publishers. Printed in the Netherlands. 445 Global Optimality Conditions in Maximizing a Convex Quadratic Function under Convex Quadratic
Journal of Global Optimization 21: 445 455, 2001. 2001 Kluwer Academic Publishers. Printed in the Netherlands. 445 Global Optimality Conditions in Maximizing a Convex Quadratic Function under Convex Quadratic
Near-Potential Games: Geometry and Dynamics
 Near-Potential Games: Geometry and Dynamics Ozan Candogan, Asuman Ozdaglar and Pablo A. Parrilo January 29, 2012 Abstract Potential games are a special class of games for which many adaptive user dynamics
Near-Potential Games: Geometry and Dynamics Ozan Candogan, Asuman Ozdaglar and Pablo A. Parrilo January 29, 2012 Abstract Potential games are a special class of games for which many adaptive user dynamics
A Proximal Method for Identifying Active Manifolds
 A Proximal Method for Identifying Active Manifolds W.L. Hare April 18, 2006 Abstract The minimization of an objective function over a constraint set can often be simplified if the active manifold of the
A Proximal Method for Identifying Active Manifolds W.L. Hare April 18, 2006 Abstract The minimization of an objective function over a constraint set can often be simplified if the active manifold of the
Systematic Tuning of Nonlinear Power System Controllers
 Proceedings of the 22 IEEE International Conference on Control Applications September 8-2, 22 Glasgow, Scotland, U.K. Systematic Tuning of Nonlinear Power System Controllers Ian A. Hiskens Department of
Proceedings of the 22 IEEE International Conference on Control Applications September 8-2, 22 Glasgow, Scotland, U.K. Systematic Tuning of Nonlinear Power System Controllers Ian A. Hiskens Department of
WHEN ARE THE (UN)CONSTRAINED STATIONARY POINTS OF THE IMPLICIT LAGRANGIAN GLOBAL SOLUTIONS?
CONSTRAINED STATIONARY POINTS OF THE IMPLICIT LAGRANGIAN GLOBAL SOLUTIONS?") WHEN ARE THE (UN)CONSTRAINED STATIONARY POINTS OF THE IMPLICIT LAGRANGIAN GLOBAL SOLUTIONS? Francisco Facchinei a,1 and Christian Kanzow b a Università di Roma La Sapienza Dipartimento di Informatica e
WHEN ARE THE (UN)CONSTRAINED STATIONARY POINTS OF THE IMPLICIT LAGRANGIAN GLOBAL SOLUTIONS? Francisco Facchinei a,1 and Christian Kanzow b a Università di Roma La Sapienza Dipartimento di Informatica e
Accelerated Block-Coordinate Relaxation for Regularized Optimization
 Accelerated Block-Coordinate Relaxation for Regularized Optimization Stephen J. Wright Computer Sciences University of Wisconsin, Madison October 09, 2012 Problem descriptions Consider where f is smooth
Accelerated Block-Coordinate Relaxation for Regularized Optimization Stephen J. Wright Computer Sciences University of Wisconsin, Madison October 09, 2012 Problem descriptions Consider where f is smooth
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Part 4. Decomposition Algorithms
 In the name of God Part 4. 4.4. Column Generation for the Constrained Shortest Path Problem Spring 2010 Instructor: Dr. Masoud Yaghini Constrained Shortest Path Problem Constrained Shortest Path Problem
In the name of God Part 4. 4.4. Column Generation for the Constrained Shortest Path Problem Spring 2010 Instructor: Dr. Masoud Yaghini Constrained Shortest Path Problem Constrained Shortest Path Problem
Subgradient Descent. David S. Rosenberg. New York University. February 7, 2018
 Subgradient Descent David S. Rosenberg New York University February 7, 2018 David S. Rosenberg (New York University) DS-GA 1003 / CSCI-GA 2567 February 7, 2018 1 / 43 Contents 1 Motivation and Review:
Subgradient Descent David S. Rosenberg New York University February 7, 2018 David S. Rosenberg (New York University) DS-GA 1003 / CSCI-GA 2567 February 7, 2018 1 / 43 Contents 1 Motivation and Review:
Convergence of Simultaneous Perturbation Stochastic Approximation for Nondifferentiable Optimization
 1 Convergence of Simultaneous Perturbation Stochastic Approximation for Nondifferentiable Optimization Ying He yhe@engr.colostate.edu Electrical and Computer Engineering Colorado State University Fort
1 Convergence of Simultaneous Perturbation Stochastic Approximation for Nondifferentiable Optimization Ying He yhe@engr.colostate.edu Electrical and Computer Engineering Colorado State University Fort
system of equations. In particular, we give a complete characterization of the Q-superlinear
 INEXACT NEWTON METHODS FOR SEMISMOOTH EQUATIONS WITH APPLICATIONS TO VARIATIONAL INEQUALITY PROBLEMS Francisco Facchinei 1, Andreas Fischer 2 and Christian Kanzow 3 1 Dipartimento di Informatica e Sistemistica
INEXACT NEWTON METHODS FOR SEMISMOOTH EQUATIONS WITH APPLICATIONS TO VARIATIONAL INEQUALITY PROBLEMS Francisco Facchinei 1, Andreas Fischer 2 and Christian Kanzow 3 1 Dipartimento di Informatica e Sistemistica
Lecture Note 7: Switching Stabilization via Control-Lyapunov Function
 ECE7850: Hybrid Systems:Theory and Applications Lecture Note 7: Switching Stabilization via Control-Lyapunov Function Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio
ECE7850: Hybrid Systems:Theory and Applications Lecture Note 7: Switching Stabilization via Control-Lyapunov Function Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Modeling of Methane Hydrate Evolution
 Numerical Modeling of Methane Hydrate Evolution Nathan L. Gibson Joint work with F. P. Medina, M. Peszynska, R. E. Showalter Department of Mathematics SIAM Annual Meeting 2013 Friday, July 12 This work
Numerical Modeling of Methane Hydrate Evolution Nathan L. Gibson Joint work with F. P. Medina, M. Peszynska, R. E. Showalter Department of Mathematics SIAM Annual Meeting 2013 Friday, July 12 This work
1. f(β) 0 (that is, β is a feasible point for the constraints)
 0 (that is, β is a feasible point for the constraints)") xvi 2. The lasso for linear models 2.10 Bibliographic notes Appendix Convex optimization with constraints In this Appendix we present an overview of convex optimization concepts that are particularly useful
xvi 2. The lasso for linear models 2.10 Bibliographic notes Appendix Convex optimization with constraints In this Appendix we present an overview of convex optimization concepts that are particularly useful
6. Multiple Reactions
 6. Multiple Reactions o Selectivity and Yield o Reactions in Series - To give maximum selectivity o Algorithm for Multiple Reactions o Applications of Algorithm o Multiple Reactions-Gas Phase 0. Types
6. Multiple Reactions o Selectivity and Yield o Reactions in Series - To give maximum selectivity o Algorithm for Multiple Reactions o Applications of Algorithm o Multiple Reactions-Gas Phase 0. Types
Ville-Pekka Eronen Marko M. Mäkelä Tapio Westerlund. Nonsmooth Extended Cutting Plane Method for Generally Convex MINLP Problems
 Ville-Pekka Eronen Marko M. Mäkelä Tapio Westerlund Nonsmooth Extended Cutting Plane Method for Generally Convex MINLP Problems TUCS Technical Report No 1055, July 2012 Nonsmooth Extended Cutting Plane
Ville-Pekka Eronen Marko M. Mäkelä Tapio Westerlund Nonsmooth Extended Cutting Plane Method for Generally Convex MINLP Problems TUCS Technical Report No 1055, July 2012 Nonsmooth Extended Cutting Plane
A derivative-free nonmonotone line search and its application to the spectral residual method
 IMA Journal of Numerical Analysis (2009) 29, 814 825 doi:10.1093/imanum/drn019 Advance Access publication on November 14, 2008 A derivative-free nonmonotone line search and its application to the spectral
IMA Journal of Numerical Analysis (2009) 29, 814 825 doi:10.1093/imanum/drn019 Advance Access publication on November 14, 2008 A derivative-free nonmonotone line search and its application to the spectral
McMaster University. Advanced Optimization Laboratory. Title: A Proximal Method for Identifying Active Manifolds. Authors: Warren L.
 McMaster University Advanced Optimization Laboratory Title: A Proximal Method for Identifying Active Manifolds Authors: Warren L. Hare AdvOl-Report No. 2006/07 April 2006, Hamilton, Ontario, Canada A Proximal
McMaster University Advanced Optimization Laboratory Title: A Proximal Method for Identifying Active Manifolds Authors: Warren L. Hare AdvOl-Report No. 2006/07 April 2006, Hamilton, Ontario, Canada A Proximal
A convergence result for an Outer Approximation Scheme
 A convergence result for an Outer Approximation Scheme R. S. Burachik Engenharia de Sistemas e Computação, COPPE-UFRJ, CP 68511, Rio de Janeiro, RJ, CEP 21941-972, Brazil regi@cos.ufrj.br J. O. Lopes Departamento
A convergence result for an Outer Approximation Scheme R. S. Burachik Engenharia de Sistemas e Computação, COPPE-UFRJ, CP 68511, Rio de Janeiro, RJ, CEP 21941-972, Brazil regi@cos.ufrj.br J. O. Lopes Departamento
Hybrid Routhian Reduction of Lagrangian Hybrid Systems
 Hybrid Routhian Reduction of Lagrangian Hybrid Systems Aaron D. Ames and Shankar Sastry Department of Electrical Engineering and Computer Sciences University of California at Berkeley Berkeley, CA 94720
Hybrid Routhian Reduction of Lagrangian Hybrid Systems Aaron D. Ames and Shankar Sastry Department of Electrical Engineering and Computer Sciences University of California at Berkeley Berkeley, CA 94720