Outline. Learning Objectives. References. Lecture 2: Second-order Systems
|
|
|
- Bernadette Stafford
- 5 years ago
- Views:
Transcription
1 Outline Lecture 2: Second-order Systems! Techniques based on linear systems analysis! Phase-plane analysis! Example: Neanderthal / Early man competition! Hartman-Grobman theorem -- validity of linearizations! Example: Duffing s equation Dr. Meeko Oishi Electrical and Computer Engineering University of British Columbia, BC moishi@ece.ubc.ca 1! Nonlinear analysis of 2 nd order systems! Closed orbits! Bendixon s theorem! Limit cycles! Index theory and Poincare theorem! Poincare-Bendixon theorem 2 Learning Objectives References! Stability through linearization! Compute the similarity transformation that results in a Jordanform state matrix! Analyze a linear system in modal coordinates and relate to stability of nonlinear system near an equilibrium point (Hartmann-Grobman)! Closed orbits and limit cycles in 2D! Distinguish between a closed orbit and a limit cycle! Determine whether a closed orbit exists (Bendixson s)! Determine whether a closed orbit exists in a given set of the state-space (Poincare-Bendixson)! Use Index theory to determine how many equilibria exist in a region of the state-space (n-dimensions)! Khalil! Section 1.2! Section 2.1, ! Sastry! Section 2.2,



!")



!")



2 ! Goal: Determine stability of the nonlinear system around a given equilibrium point.! Method: Analyze the linear system (an easy problem) and use Hartman-Grobman Theorem to make claims about the nonlinear system (a harder problem)! Any linear system can be transformed via a similarity transformation into real Jordan form Nonlinear system Linearization about an equilibrium point Linear system (dynamics of deviations from the equilibrium point)! The phase portrait of the system in modal coordinates depends on the form of J! The catch: Cannot apply blindly! 5 6! Case 1a:! 1!! 2! Case 1b:! 1 =0 or! 2 =0! Case 2:! Case 3: (dependent eigenvectors)! Case 1c:! 1 =! 2 =! (independent eigenvectors) 7 8


,! (0,(A-sB)/D),! ((A-B)/D, 0)!")


3 Ex. #3: Neanderthal extinction Ex. #3: Neanderthal extinction! Similar to Lotka-Volterra competition equations! Neanderthals competed with Early Modern Man approximately 50,000 years ago! Parameters! Birth rate A! Death rate B (Neanderthals), s!b (Early Man)! Competition coefficient D! Similarity parameter s! J. C. Flores, A Mathematical Model for Neanderthal Extinction, Journal of Theoretical Biology, Volume 191, Issue 3, 7 April 1998, Pages ! Show that the equilibria are! (0,0),! (0,(A-sB)/D),! ((A-B)/D, 0)! Compute the eigenvalues of the Jacobian matrix at each isolated equilibium point.! Show that the only stable equilibrium point corresponds to Neanderthals extinction and a surviving population of Early Modern Man Hartman-Grobman Theorem Heart Rhythms: stable foci If the linearization about equilibrium point x* of the nonlinear system (1) (2) Has no eigenvalues on the imaginary axis, then there exists a continuous map h (that has a continuous inverse), Which takes trajectories from (2) and maps them onto those of (1)

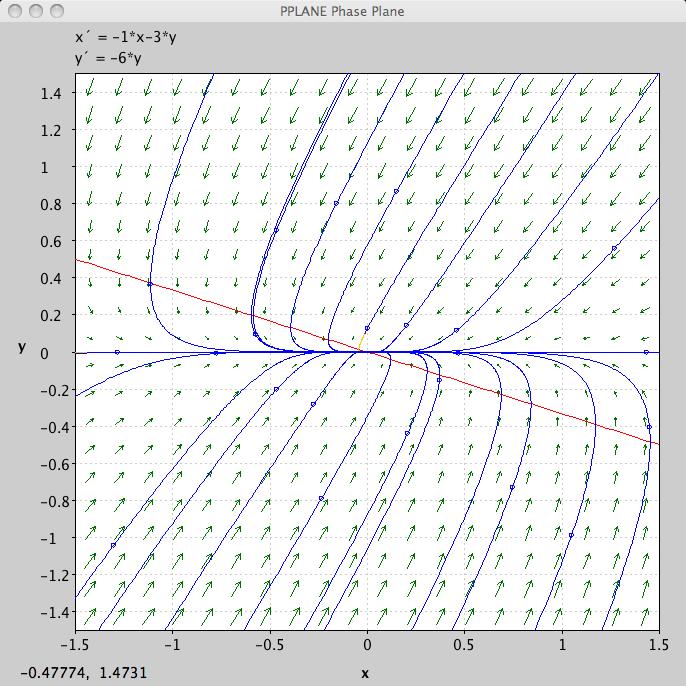
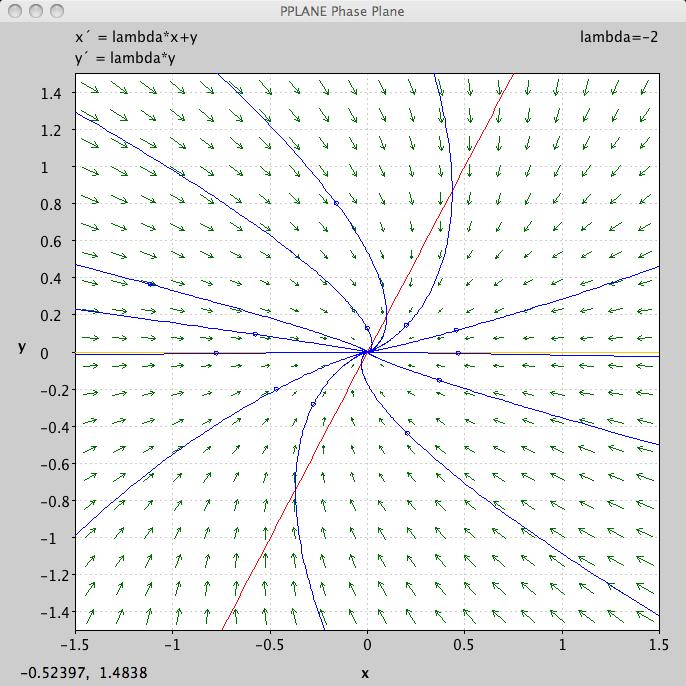

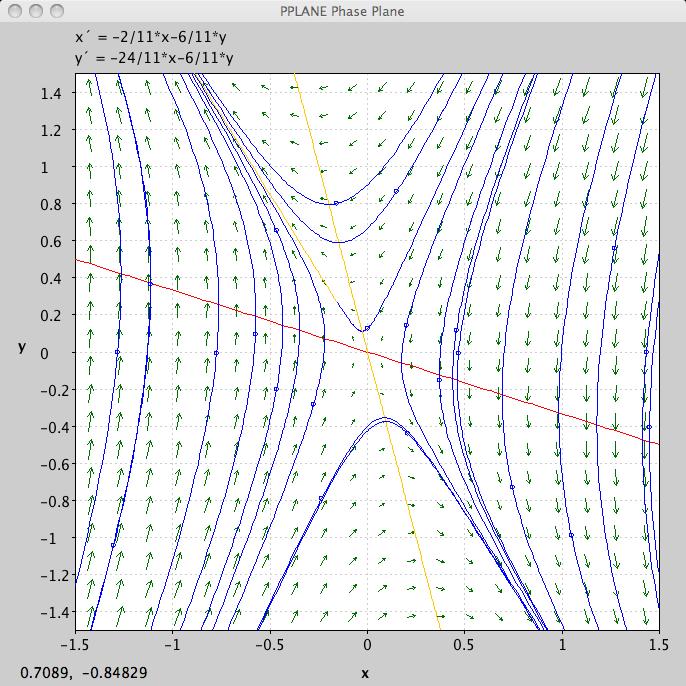
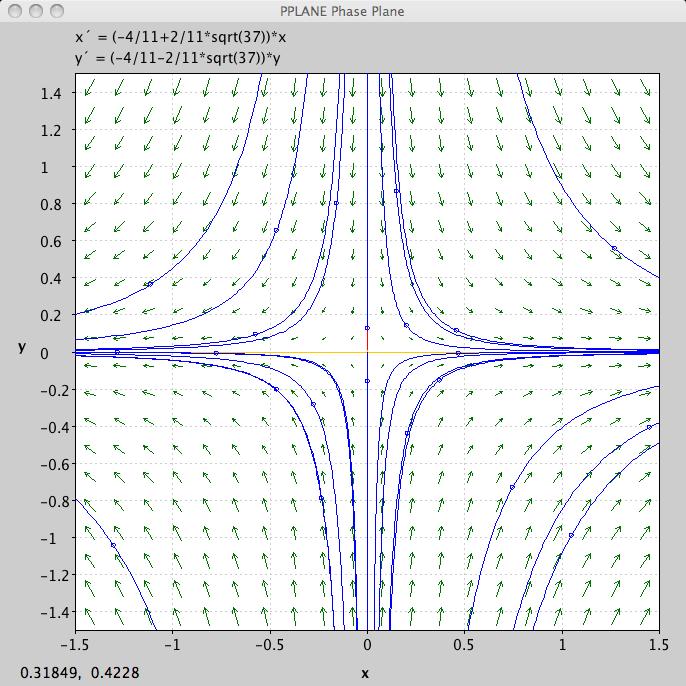
4 Lotka Volterra Competition ("V,"W around (1,0) ) ("V,"W around (0,1) ) ("V,"W around (0,0) ) ("V,"W around (2/11,3/11) ) 15 16




5 Non-hyperbolic eq. pt (x 1, x 2 ) #>0 (x 1, x 2 ) #< Phase-plane analysis! Process for each equilibrium point:! Linearize nonlinear system about equilibrium point.! Compute eigenvalues and eigenvectors of D f.! Create similarity transformation.! Sketch phase-plane plot in transformed coordinates.! If eigenvalues do NOT have 0 real part, stability of linear system is same as stability of nonlinear system near the equilibrium point.! Note that pplane5 plots are simulations. They do not provide any guarantees of the actual system s behavior.! Closed orbits vs. limit cycles! Bendixon s theorem! Absence of closed orbits! Poincare-Bendixson theorem! Existence of closed orbits within an invariant set! Index theory! Poincare theorem! # of equilibria within a closed orbit 19 20
6 Definition: Closed orbit! A closed orbit $ of the planar system is the trace of the trajectory of a non-trivial periodic solution. Definition: Limit cycle! A limit cycle is a closed orbit g such that there is a such that (stable) (unstable) Notes:! An equilibrium point cannot be a closed orbit! For any point, there exists a finite value T such that 21 Note:! All limit cycles are closed orbits, but not all closed orbits are limit cycles.! The theorems to follow concern closed orbits, not limit cycles necessarily. 22! Bendixson s theorem Suppose D is a simply connected region in R 2, such that and div(f) does not change sign in D. Then D contains no closed orbits of! Poincare-Bendixson Theorem Consider the planar dynamical system Every closed, bounded, non-empty, positively invariant set contains an equilibrium point or a closed orbit. Notes:! Simply connected means one region with no holes.! Proves the absence of closed orbits 23 Notes:! If K contains equilibrium points, K may also contain a union of trajectories connecting these equilibrium points, but this is not create a closed orbit.! An open set U that is enclosed by a closed orbit contains an eq. point and possibly a closed orbit. 24
7 Index theory! Definition: The index of a region D with respect to f(x) is defined as with! Notes:! % f is the angle made by f(x) with the x 1 axis.! I f (D) is an integer! For D that contains a single equilibrium point x 0, we refer to the index of the equilibrium point at I f (x 0 ) Index theory! Poincare theorem: Let N represent the number of nodes, centers, and foci enclosed by a closed orbit, and let S represent the number of enclosed saddle points. Then N = S + 1! Notes:! Index theory predicts the existence of equilibrium points without doing detailed calculations
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d
; 9.5 Eigenvalues and Eigenvectors, cont d") Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Stability lectures. Stability of Linear Systems. Stability of Linear Systems. Stability of Continuous Systems. EECE 571M/491M, Spring 2008 Lecture 5
 EECE 571M/491M, Spring 2008 Lecture 5 Stability of Continuous Systems http://courses.ece.ubc.ca/491m moishi@ece.ubc.ca Dr. Meeko Oishi Electrical and Computer Engineering University of British Columbia,
EECE 571M/491M, Spring 2008 Lecture 5 Stability of Continuous Systems http://courses.ece.ubc.ca/491m moishi@ece.ubc.ca Dr. Meeko Oishi Electrical and Computer Engineering University of British Columbia,
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
E209A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions
 E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
Nonlinear Autonomous Dynamical systems of two dimensions. Part A
 Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
6.3. Nonlinear Systems of Equations
 G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems
 An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Math 3301 Homework Set Points ( ) ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )
 ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )") #7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
#7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
Math 312 Lecture Notes Linearization
 Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Local Phase Portrait of Nonlinear Systems Near Equilibria
 Local Phase Portrait of Nonlinear Sstems Near Equilibria [1] Consider 1 = 6 1 1 3 1, = 3 1. ( ) (a) Find all equilibrium solutions of the sstem ( ). (b) For each equilibrium point, give the linear approimating
Local Phase Portrait of Nonlinear Sstems Near Equilibria [1] Consider 1 = 6 1 1 3 1, = 3 1. ( ) (a) Find all equilibrium solutions of the sstem ( ). (b) For each equilibrium point, give the linear approimating
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
3.5 Competition Models: Principle of Competitive Exclusion
 94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
10 Back to planar nonlinear systems
 10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Introduction to Dynamical Systems
 Introduction to Dynamical Systems Autonomous Planar Systems Vector form of a Dynamical System Trajectories Trajectories Don t Cross Equilibria Population Biology Rabbit-Fox System Trout System Trout System
Introduction to Dynamical Systems Autonomous Planar Systems Vector form of a Dynamical System Trajectories Trajectories Don t Cross Equilibria Population Biology Rabbit-Fox System Trout System Trout System
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Phase Portraits of Nonlinear Differential Equations
 ODE4-net.nb Phase Portraits of Nonlinear Differential Equations Nonlinear Differential Equations: x' = f (x, y) (1) Consider the system where f and g are functions of two y' = g(x, y) () variables x and
ODE4-net.nb Phase Portraits of Nonlinear Differential Equations Nonlinear Differential Equations: x' = f (x, y) (1) Consider the system where f and g are functions of two y' = g(x, y) () variables x and
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Lotka Volterra Predator-Prey Model with a Predating Scavenger
 Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
DIFFERENTIAL GEOMETRY APPLIED TO DYNAMICAL SYSTEMS
 WORLD SCIENTIFIC SERIES ON NONLINEAR SCIENCE Series Editor: Leon O. Chua Series A Vol. 66 DIFFERENTIAL GEOMETRY APPLIED TO DYNAMICAL SYSTEMS Jean-Marc Ginoux Université du Sud, France World Scientific
WORLD SCIENTIFIC SERIES ON NONLINEAR SCIENCE Series Editor: Leon O. Chua Series A Vol. 66 DIFFERENTIAL GEOMETRY APPLIED TO DYNAMICAL SYSTEMS Jean-Marc Ginoux Université du Sud, France World Scientific
Dynamics of a Population Model Controlling the Spread of Plague in Prairie Dogs
 Dynamics of a opulation Model Controlling the Spread of lague in rairie Dogs Catalin Georgescu The University of South Dakota Department of Mathematical Sciences 414 East Clark Street, Vermillion, SD USA
Dynamics of a opulation Model Controlling the Spread of lague in rairie Dogs Catalin Georgescu The University of South Dakota Department of Mathematical Sciences 414 East Clark Street, Vermillion, SD USA
Math 232, Final Test, 20 March 2007
 Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting
 Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting August 2012 Overview Last Model ẋ = αx(1 x) a(1 m)xy 1+c(1 m)x H(x) ẏ = dy + b(1 m)xy 1+c(1 m)x (1) where
Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting August 2012 Overview Last Model ẋ = αx(1 x) a(1 m)xy 1+c(1 m)x H(x) ẏ = dy + b(1 m)xy 1+c(1 m)x (1) where
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
Mathematical Modeling I
 Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
+ i. cos(t) + 2 sin(t) + c 2.
 + 2 sin(t) + c 2.") MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION
 CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
GLOBAL DYNAMICS OF A LOTKA VOLTERRA MODEL WITH TWO PREDATORS COMPETING FOR ONE PREY JAUME LLIBRE AND DONGMEI XIAO
 This is a preprint of: Global dynamics of a Lotka-Volterra model with two predators competing for one prey, Jaume Llibre, Dongmei Xiao, SIAM J Appl Math, vol 742), 434 453, 214 DOI: [11137/1392397] GLOBAL
This is a preprint of: Global dynamics of a Lotka-Volterra model with two predators competing for one prey, Jaume Llibre, Dongmei Xiao, SIAM J Appl Math, vol 742), 434 453, 214 DOI: [11137/1392397] GLOBAL
2D-Volterra-Lotka Modeling For 2 Species
 Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Continuous time population models
 Continuous time population models Jaap van der Meer jaap.van.der.meer@nioz.nl Abstract Many simple theoretical population models in continuous time relate the rate of change of the size of two populations
Continuous time population models Jaap van der Meer jaap.van.der.meer@nioz.nl Abstract Many simple theoretical population models in continuous time relate the rate of change of the size of two populations
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Problem Set Number 5, j/2.036j MIT (Fall 2014)
") Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
College of Natural Science Department of Mathematics
 College of Natural Science Department of Mathematics Graduate Project Report on Difference Equations and Bifurcation Analysis of Discrete Dynamical System Submitted in partial fulfilment of the requirements
College of Natural Science Department of Mathematics Graduate Project Report on Difference Equations and Bifurcation Analysis of Discrete Dynamical System Submitted in partial fulfilment of the requirements
EN Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015
 EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS
 DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS Morris W. Hirsch University of California, Berkeley Stephen Smale University of California, Berkeley Robert L. Devaney Boston University
DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS Morris W. Hirsch University of California, Berkeley Stephen Smale University of California, Berkeley Robert L. Devaney Boston University
Dynamical Systems: Ecological Modeling
 Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Chapter 7. Nonlinear Systems. 7.1 Introduction
 Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Bifurcation and Stability Analysis of a Prey-predator System with a Reserved Area
 ISSN 746-733, England, UK World Journal of Modelling and Simulation Vol. 8 ( No. 4, pp. 85-9 Bifurcation and Stability Analysis of a Prey-predator System with a Reserved Area Debasis Mukherjee Department
ISSN 746-733, England, UK World Journal of Modelling and Simulation Vol. 8 ( No. 4, pp. 85-9 Bifurcation and Stability Analysis of a Prey-predator System with a Reserved Area Debasis Mukherjee Department
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
The Dynamic Behaviour of the Competing Species with Linear and Holling Type II Functional Responses by the Second Competitor
 , pp. 35-46 http://dx.doi.org/10.14257/ijbsbt.2017.9.3.04 The Dynamic Behaviour of the Competing Species with Linear and Holling Type II Functional Responses by the Second Competitor Alemu Geleta Wedajo
, pp. 35-46 http://dx.doi.org/10.14257/ijbsbt.2017.9.3.04 The Dynamic Behaviour of the Competing Species with Linear and Holling Type II Functional Responses by the Second Competitor Alemu Geleta Wedajo
DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS
 DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS Morris W. Hirsch University of California, Berkeley Stephen Smale University of California, Berkeley Robert L. Devaney Boston University
DIFFERENTIAL EQUATIONS, DYNAMICAL SYSTEMS, AND AN INTRODUCTION TO CHAOS Morris W. Hirsch University of California, Berkeley Stephen Smale University of California, Berkeley Robert L. Devaney Boston University
Lecture 38. Almost Linear Systems
 Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
DYNAMICAL SYSTEMS. I Clark: Robinson. Stability, Symbolic Dynamics, and Chaos. CRC Press Boca Raton Ann Arbor London Tokyo
 DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
Qualitative Analysis of Tumor-Immune ODE System
 of Tumor-Immune ODE System LG de Pillis and AE Radunskaya August 15, 2002 This work was supported in part by a grant from the WM Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1 Simplified System of
of Tumor-Immune ODE System LG de Pillis and AE Radunskaya August 15, 2002 This work was supported in part by a grant from the WM Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1 Simplified System of
3 Stability and Lyapunov Functions
 CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation.
 MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Constructing a chaotic system with any number of equilibria
 Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Global Stability Analysis on a Predator-Prey Model with Omnivores
 Applied Mathematical Sciences, Vol. 9, 215, no. 36, 1771-1782 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.215.512 Global Stability Analysis on a Predator-Prey Model with Omnivores Puji Andayani
Applied Mathematical Sciences, Vol. 9, 215, no. 36, 1771-1782 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.215.512 Global Stability Analysis on a Predator-Prey Model with Omnivores Puji Andayani
Practice Problems for Final Exam
 Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Problem set 6 Math 207A, Fall 2011 Solutions. 1. A two-dimensional gradient system has the form
 Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Stability Analysis of Predator- Prey Models via the Liapunov Method
 Stability Analysis of Predator- Prey Models via the Liapunov Method Gatto, M. and Rinaldi, S. IIASA Research Memorandum October 1975 Gatto, M. and Rinaldi, S. (1975) Stability Analysis of Predator-Prey
Stability Analysis of Predator- Prey Models via the Liapunov Method Gatto, M. and Rinaldi, S. IIASA Research Memorandum October 1975 Gatto, M. and Rinaldi, S. (1975) Stability Analysis of Predator-Prey
Continuous Threshold Policy Harvesting in Predator-Prey Models
 Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
Lecture - 11 Bendixson and Poincare Bendixson Criteria Van der Pol Oscillator
 Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 11 Bendixson and Poincare Bendixson Criteria
Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 11 Bendixson and Poincare Bendixson Criteria
Stable Coexistence of a Predator-Prey model with a Scavenger
 ANTON DE KOM UNIVERSITEIT VAN SURINAME INSTITUTE FOR GRADUATE STUDIES AND RESEARCH Stable Coexistence of a Predator-Prey model with a Scavenger Thesis in partial fulfillment of the requirements for the
ANTON DE KOM UNIVERSITEIT VAN SURINAME INSTITUTE FOR GRADUATE STUDIES AND RESEARCH Stable Coexistence of a Predator-Prey model with a Scavenger Thesis in partial fulfillment of the requirements for the
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Stability and bifurcation in a two species predator-prey model with quintic interactions
 Chaotic Modeling and Simulation (CMSIM) 4: 631 635, 2013 Stability and bifurcation in a two species predator-prey model with quintic interactions I. Kusbeyzi Aybar 1 and I. acinliyan 2 1 Department of
Chaotic Modeling and Simulation (CMSIM) 4: 631 635, 2013 Stability and bifurcation in a two species predator-prey model with quintic interactions I. Kusbeyzi Aybar 1 and I. acinliyan 2 1 Department of
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 1. Linear systems Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Linear systems 1.1 Differential Equations 1.2 Linear flows 1.3 Linear maps
B5.6 Nonlinear Systems 1. Linear systems Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Linear systems 1.1 Differential Equations 1.2 Linear flows 1.3 Linear maps
M.5 Modeling the Effect of Functional Responses
 M.5 Modeling the Effect of Functional Responses The functional response is referred to the predation rate as a function of the number of prey per predator. It is recognized that as the number of prey increases,
M.5 Modeling the Effect of Functional Responses The functional response is referred to the predation rate as a function of the number of prey per predator. It is recognized that as the number of prey increases,
7.7 LOTKA-VOLTERRA M ODELS
 77 LOTKA-VOLTERRA M ODELS sstems, such as the undamped pendulum, enabled us to draw the phase plane for this sstem and view it globall In that case we were able to understand the motions for all initial
77 LOTKA-VOLTERRA M ODELS sstems, such as the undamped pendulum, enabled us to draw the phase plane for this sstem and view it globall In that case we were able to understand the motions for all initial
Entrance Exam, Differential Equations April, (Solve exactly 6 out of the 8 problems) y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.
 y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.") Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Elements of Applied Bifurcation Theory
 Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
A Discrete Model of Three Species Prey- Predator System
 ISSN(Online): 39-8753 ISSN (Print): 347-670 (An ISO 397: 007 Certified Organization) Vol. 4, Issue, January 05 A Discrete Model of Three Species Prey- Predator System A.George Maria Selvam, R.Janagaraj
ISSN(Online): 39-8753 ISSN (Print): 347-670 (An ISO 397: 007 Certified Organization) Vol. 4, Issue, January 05 A Discrete Model of Three Species Prey- Predator System A.George Maria Selvam, R.Janagaraj
Hyperbolic Dynamics. Todd Fisher. Department of Mathematics University of Maryland, College Park. Hyperbolic Dynamics p.
 Hyperbolic Dynamics p. 1/36 Hyperbolic Dynamics Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park Hyperbolic Dynamics p. 2/36 What is a dynamical system? Phase
Hyperbolic Dynamics p. 1/36 Hyperbolic Dynamics Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park Hyperbolic Dynamics p. 2/36 What is a dynamical system? Phase
Lecture 3. Dynamical Systems in Continuous Time
 Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Local Stability Analysis of a Mathematical Model of the Interaction of Two Populations of Differential Equations (Host-Parasitoid)
") Biology Medicine & Natural Product Chemistry ISSN: 089-6514 Volume 5 Number 1 016 Pages: 9-14 DOI: 10.1441/biomedich.016.51.9-14 Local Stability Analysis of a Mathematical Model of the Interaction of Two
Biology Medicine & Natural Product Chemistry ISSN: 089-6514 Volume 5 Number 1 016 Pages: 9-14 DOI: 10.1441/biomedich.016.51.9-14 Local Stability Analysis of a Mathematical Model of the Interaction of Two
Qualitative Analysis of Tumor-Immune ODE System
 of Tumor-Immune ODE System L.G. de Pillis and A.E. Radunskaya August 15, 2002 This work was supported in part by a grant from the W.M. Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1. Simplified System
of Tumor-Immune ODE System L.G. de Pillis and A.E. Radunskaya August 15, 2002 This work was supported in part by a grant from the W.M. Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1. Simplified System
Hamiltonian Dynamics In The Theory of Abstraction
 Hamiltonian Dynamics In The Theory of Abstraction Subhajit Ganguly. email: gangulysubhajit@indiatimes.com Abstract: This paper deals with fluid flow dynamics which may be Hamiltonian in nature and yet
Hamiltonian Dynamics In The Theory of Abstraction Subhajit Ganguly. email: gangulysubhajit@indiatimes.com Abstract: This paper deals with fluid flow dynamics which may be Hamiltonian in nature and yet
Lab 5: Nonlinear Systems
 Lab 5: Nonlinear Systems Goals In this lab you will use the pplane6 program to study two nonlinear systems by direct numerical simulation. The first model, from population biology, displays interesting
Lab 5: Nonlinear Systems Goals In this lab you will use the pplane6 program to study two nonlinear systems by direct numerical simulation. The first model, from population biology, displays interesting
Math 5490 November 5, 2014
 Math 549 November 5, 214 Topics in Applied Mathematics: Introduction to the Mathematics of Climate Mondays and Wednesdays 2:3 3:45 http://www.math.umn.edu/~mcgehee/teaching/math549-214-2fall/ Streaming
Math 549 November 5, 214 Topics in Applied Mathematics: Introduction to the Mathematics of Climate Mondays and Wednesdays 2:3 3:45 http://www.math.umn.edu/~mcgehee/teaching/math549-214-2fall/ Streaming
Research Article Global Dynamics of a Competitive System of Rational Difference Equations in the Plane
 Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
We have two possible solutions (intersections of null-clines. dt = bv + muv = g(u, v). du = au nuv = f (u, v),
. du = au nuv = f (u, v),") Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY. P. Yu 1,2 and M. Han 1
 COMMUNICATIONS ON Website: http://aimsciences.org PURE AND APPLIED ANALYSIS Volume 3, Number 3, September 2004 pp. 515 526 TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY P. Yu 1,2
COMMUNICATIONS ON Website: http://aimsciences.org PURE AND APPLIED ANALYSIS Volume 3, Number 3, September 2004 pp. 515 526 TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY P. Yu 1,2
Is chaos possible in 1d? - yes - no - I don t know. What is the long term behavior for the following system if x(0) = π/2?
 = π/2?") Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Dynamical Analysis of a Harvested Predator-prey. Model with Ratio-dependent Response Function. and Prey Refuge
 Applied Mathematical Sciences, Vol. 8, 214, no. 11, 527-537 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/12988/ams.214.4275 Dynamical Analysis of a Harvested Predator-prey Model with Ratio-dependent
Applied Mathematical Sciences, Vol. 8, 214, no. 11, 527-537 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/12988/ams.214.4275 Dynamical Analysis of a Harvested Predator-prey Model with Ratio-dependent
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium