Symbolic Dynamics of Digital Signal Processing Systems
|
|
|
- Clementine King
- 5 years ago
- Views:
Transcription

1 Symbolic Dynamics of Digital Signal Processing Systems Dr. Bingo Wing-Kuen Ling School of Engineering, University of Lincoln. Brayford Pool, Lincoln, Lincolnshire, LN6 7TS, United Kingdom.
2 My research interests Symbolic dynamics Limit cycle, fractal and chaotic behaviors of digital filters with two s, sigma delta modulators and perceptron training algorithms Optimization theory Semi-infinite programming, nonconvex optimization and nonsmooth optimization with applications to filter, filter bank, wavelet kernel and pulse designs Time frequency analysis Nonuniform filter banks, filter banks with block samplers to multimedia and biomedical signal processing Control theory Impulsive control, optimal control, fuzzy control and chaos control for HIV model and avian influenza model
3 Acknowledgements Prof. Xinghuo Yu (Royal Melbourne of Institute of Technology) Dr. Joshua D. Reiss (Queen Mary University of London) Dr. Herbert Ho-Ching Iu (University of Western Australia) Dr. Hak-Keung Lam (King s College London) 3
4 Introduction Outline complement arithmetic Sigma delta modulators Perceptron training algorithms Conclusions Q&A Session 4
5 Introduction Definition Symbolic dynamics is a kind of system dynamics which involves multi-level signals. Motivations Many practical signal processing systems, such as digital filters with two s complement arithmetic, sigma delta modulators and perceptron training algorithms, are symbolic dynamical systems. They are found in almost everywhere. 5
6 Challenges Introduction Symbolic dynamical systems could lead to chaotic, fractals and divergent behaviors. Stability conditions are generally unknown. Admissibility conditions are generally unknown. 6
7 What are digital filters? U Digital filters are systems that are characterized in the frequency domain. Y ( ) ( ω) H ω = U ( ω) ( k) u h(k) y( k) ( ) jωk ω = u( k) e ( ) jωk H ω = h( k) e Y ( ω) = y( k) k k k e jωk 7
8 Types of digital filters Lowpass filters Allow a low frequency band of a signal to pass through and attenuate a high frequency band. 8
9 Types of digital filters Bandpass filters Allow intermediate frequency bands of a signal to pass through and attenuate both low and high frequency bands. 9
10 Types of digital filters Highpass filters Allow a high frequency band of a signal to pass through and attenuate a low frequency band.
11 Types of digital filters Band reject filters Allow both low and high frequency bands of a signal to pass through and attenuate intermediate frequency bands.
12 Types of digital filters Notch filters Allow almost all frequency components to pass through but attenuate particular frequencies.
13 Types of digital filters Oscillators Allow particular frequency components to pass through and attenuate almost all frequency components. 3
14 Types of digital filters Allpass filters Allow all frequency components to pass through. (g) Magnitude response H(ω) Frequency ω 4
15 Hardware schematic u( k) Accumulator f( ) y( k) a z - z - b 5
16 When no input is present, the filter can be described by the following nonlinear state space difference equation: x ( k + ) x( k + ) = ( ( )) ( + ) F x k x k = f x( k) ( b x ( k) + a x ( k) ) Direct form 6
17 where f( ) is the nonlinear function associated with the two s complement arithmetic f(v) Straight lines -3-3 v Overflow No - overflow Overflow 7
18 8 where and m is the minimum integer satisfying ( ) ( ) ( ) { } ( ) { } m m k s x x x x I k x k x a b,,,,,,, :, L L < < A = ( ) ( ) ( ) ( ) k s k x k x k + = + A x + + m x a x b m
19 9 is called symbolic sequences. ( ) k s ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 3 3 < + = < + = < + = k x a k x b k s k x a k x b k s k x a k x b k s
20 T For example: x( ) = [ ], b = and a =. 5 b x( ) + a x( ) =.93 s( ) = b x () + a x () =.534 s() = M b x b x b x b x b x M s = ( 4) + a x( 4) =.8 s( 4) = and x( 5) ( 5) + a x( 5) =.7597 s( 5) = ( 6) + a x( 6) =.684 s( 6) = ( 7) + a x( 7) =.689 s( 7) = and x( 8) ( 8) + a x ( 8) =.839 s( 8) = and x ( 9) ( L L) Two's complement value =.998 =.93 =.96
21 Stability analysis of the corresponding linear system Eigenvalues of A λ = a ± a + 4 b
22 b R R R 3 - R 5 a - R R 3 R 4
23 R 5 :Magnitudes of both eigenvalues <. The corresponding linear system is stable. R and R 3 : Either one of the magnitudes of the eigenvalues <. The corresponding linear system is unstable. R and R 4 :Magnitudes of both eigenvalues are greater than. The corresponding linear system is unstable. 3
24 Effects of different initial conditions when the eigenvalues of system matrix are on the unit circle Type I trajectory There is a single rotated and translated ellipse in the phase portrait. a =.5, b =, x.6.6 ( ) = 4
25 5
26 Type II trajectory There are some rotated and translated ellipses in the phase portrait..66 a =.5, b =, x( ) =.66 6

27 This corresponds to the limit cycle behavior. 7
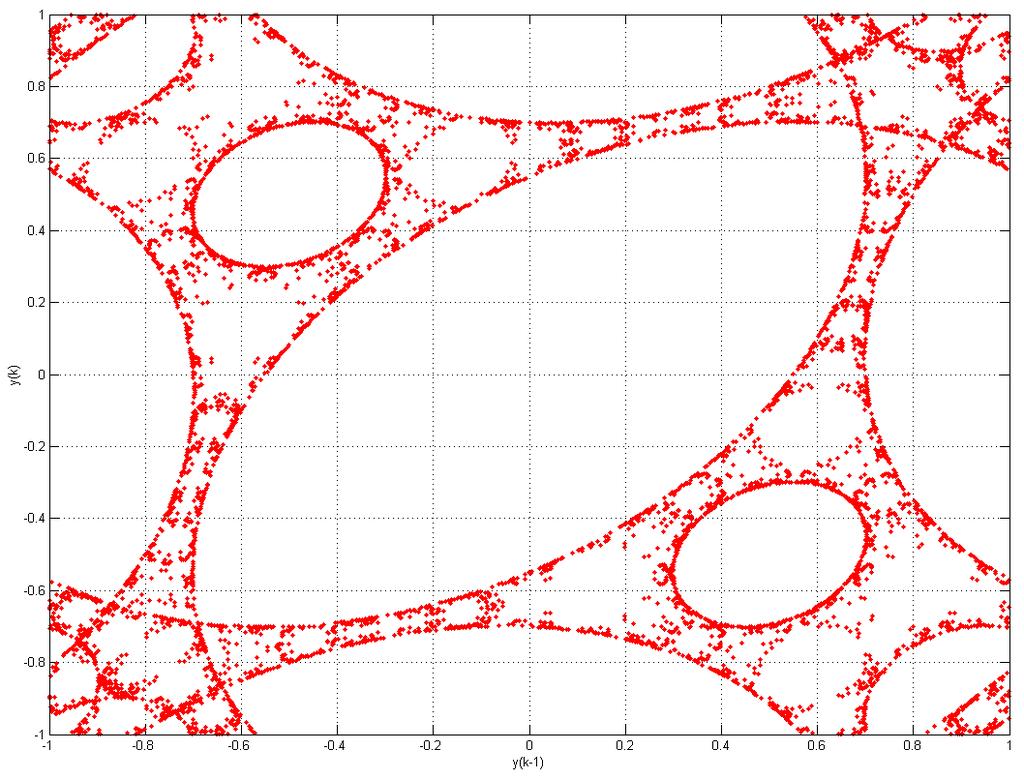
28 Type III trajectory There is a fractal pattern on the phase portrait. a =.5, b =, x ( ) = 8
29 Conclusion: Very sensitive to initial conditions 9
30 3 Step response of second order digital filters with two s The system can be represented as: where and DC offset on symbolic sequences. ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) k s k u k x k x k u k x a k x b f k x k + + = + + = + B A x B = = a b A

31 .3.3 For a =.5, b =, c =, x( ) = 3
=")
32 For a =.5, b = and c = s(k)= s(k)= s(k)=- s(k)=- 3
 =, s")
33 .7.7 For a =.5, b =, c =, x( ) =, s = (,,,,L) 33

34 For a =.5, b = and c = 34
")
35 For a =.5, b =, c =, x( ) = 35

36 For a =.5, b = and c = 36
37 Sinusoidal response of second order digital filters with two s 37
38 38

39 Autonomous case when the eigenvalues of A are inside the unit circle 39
40 x x 4
41 x x
42 Autonomous case for third order digital filters with two s realized in cascade form System block diagram: f () y ( k ) f ( ) Delay Delay c x 3 ( k ) a Delay x ( k ) b x ( k ) y( k ) 4
43 43
44 44
45 Autonomous case for third-order digital filters with two s realized in parallel form f ( ) System block diagram: a Delay x ( k) b Delay x ( k) y ( k) f ( ) y( k) c Delay x 3 ( k) y ( k) 45
46 46
47 47
48 Admissibility of second order digital filters with two s Admissible set of periodic symbolic sequences is defined as a set of periodic symbolic sequences such that there exists an initial condition that produces the symbolic sequences. Set of initial conditions Admissible set of periodic symbolic sequences x() s 48
49 For example, when a =.5, b =, c =, M Admissible s Not admissible s s = (,L) s = (,L) s = (,L) s = (,,L ) s = (,,L) s = (,,L) s = (,,L ) s = (,,L) s = (, 3 s = (,,,L ) s = (,,,L) s = (,,,L ) s = (,,,L) s = (,,,L) s = (,,,L ) s = (,,,L ) s =,,,L s = (,,,L) s = (,,,L) s = (,,,L ) s = (,,,L) s = (,,,L) s = (,,,L) 5 Not found L ( ) 49
50 A periodic sequence s with period M is admissible if and only if for i =,, L, M M j= s ( mod( i + j, M )) sin M cos M θ sinθ j θ < 5
51 Sigma delta modulators What is sigma delta modulators? Sigma delta modulators are devices implementing sigma delta modulations and are widely used in analogue-to-digital conversions. The input signals are first oversampled to obtain the inputs of the sigma delta modulators. The loop filters are to separate the quantization noises and the input signals so that very high signal-to-noise ratios could be achieved at very coarse quantization schemes. 5
52 Sigma delta modulators Block diagram u(k) F(z) y(k) Q s(k) S U S N ( z) F( z) = ( z) + F( z) ( z) = ( z) + F( z) 5
53 Sigma delta modulators Nonlinear state space dynamical model: u cosθ z z F( z) = cosθ z + z y( k) cosθ y( k ) + y( k ) = cosθ ( u( k ) Q( y( k ) )) ( y( k ) Q( y( k ) )) y( k) = cosθ y( k ) y( k ) + cosθ ( u( k ) Q( y( k ) )) ( y( k ) Q( y( k ) )) ( k ) [ u( k ) u( k ) ] T x( k) [ y( k ) y( k ) ] T s( k) [ Q( y( k ) ) Q( y( k ) )] T 53
54 Sigma delta modulators A x Q cos θ B ( k +) = Ax( k) + B( u( k) s( k) ) ( y) y otherwise cosθ There are only finite numbers of possibilities of s(k). Hence, s(k) can be viewed as symbol and s(k) is called a symbolic sequence. 54
55 Sigma delta modulators Second order marginally stable bandpass sigma delta modulators.5 x x
56 Sigma delta modulators 56
57 Sigma delta modulators Second order strictly stable bandpass sigma delta modulators.5 x(k) Clock cycle x
58 Sigma delta modulators 58

59 Sigma delta modulators 59
60 Sigma delta modulators General second order bandpass sigma delta modulators 6
61 6 Admissibility of periodic sequence M M M M M M M D D D D D D D D D D D D D L L O M M O O O M O L ( ) ( ) ( ) ( ) [ ] T M s M s s s,,, L ζ ( ) ( ) + + θ θ θ θ sin sin sin sin j c j d j c j d D j Sigma delta modulators
62 K υ diag ( ) ( ) ) M M I A, L, I A [ υ, L υ] T ( s( ), s( ), L, s( M ) ) τ, s M ( d + c) u ( d c) + sin jθ, sinθ j= sin u θ jθ Σ be the admissible set of periodic output sequences with period M Σ = : Sigma delta modulators { s Q( K( Dζ + τ) ) = ζ} M j= sin 6
63 Perceptron training algorithms What is a perceptron training algorithm? A perceptron is a single neuron that employs a single bit quantization function as its activation function. x x d y ( k) ( k) where M w ( k) w d ( k) Q y( k) w ( k) ( ) ( T k = Q w ( k) x( k) ) x( k ) [, x ( k ),, x ( k )] T L d w( k ) [ w ( k ) w ( k ),, w ( k )] T d Q ( z), L z z < 63
64 Perceptron training algorithms What is a perceptron training algorithm? The weights of a perceptron is usually found by the perceptron training algorithm. w ( k + ) = w( k) + t ( k) y( k) x ( k) where t(k) is the desired output corresponding to x(k). If w(k) converges, then the steady state value of w(k) could be employed as the weights of the perceptron. 64
65 Perceptron training algorithms Example w Iteration index k w old (k) x(k) t(k) y(k) w new (k) [ ] T [ 5 ] T - [- -5 -] T [- -5 -] T [ ] T - - [- -5 -] T [- -5 -] T [ ] T - [ -4 ] T 3 [ -4 ] T [ 3 3] T - [ - 3] T 4 [ - 3] T [ 4 ] T - [ -5 ] T 5 [ -5 ] T [ 3] T - [ -3 4] T 6 [ -3 4] T [ 5 ] T - - [ -3 4] T 7 [ -3 4] T [ ] T - - [ -3 4] T 8 [ -3 4] T [ ] T [ -3 4] T Converge ( k + ) = w( k) ( k) y( k) x ( k) 9 [ -3 4] T [ 3 3] T [ -3 4] T [ -3 4] T [ 4 ] T - - [ -3 4] T [ -3 4] T [ 3] T [ -3 4] T + t 65
66 Perceptron training algorithms Example 4 x 3 Linearly Separable 4 6 x 66
67 Perceptron training algorithms Example w ( k + ) = w( k) Iteration index k w old (k) x(k) t(k) y(k) w new (k) [ ] T [ ] T - [- ] T [- ] T [ ] T - [ ] T [ ] T [ ] T [ ] T 3 [ ] T [ ] T - [- - ] T 4 [- - ] T [ ] T - - [- - ] T 5 [- - ] T [ ] T - [ - ] T 6 [ - ] T [ ] T - [ ] T 7 [ ] T [ ] T - [ - ] T 8 [ - ] T [ ] T - [- - ] T Limit Cycle + t ( k) y( k) x ( k) 9 [- - ] T [ ] T - [ - ] T [ - ] T [ ] T - [ ] T [ ] T [ ] T - [ - ] T 67
68 x Perceptron training algorithms Example Nonlinearly Separable - - x 68
69 Perceptron training algorithms Example 3 Class Class w (k) w (k) w (k) x Time index k 3 4 Time index k Time index k
70 7 Perceptron training algorithms Example 4 The set of training feature vectors Desirable output Initial weight Result: Set of weights of the perceptron: Invariant set of weights of the perceptron: Invariant map: Note: is not bijective because,,, { },,, ( ) [ ] T,, = w ( ) [ ] T k,, = w Z k [ ] { } T,, = [ ] { } [ ] { } T T F,,,, : I 3 3 : ~ R R I F ( ) ( ) ( ) k k k T x w x > k Z,,,
71 Perceptron training algorithms Class Class x w (k) -.5 w (k) - w (k) x Time index k Time index k Time index k 7
72 Perceptron training algorithms Example 5 The set of training feature vectors.746,.867 Desirable output {,,, } Initial weight w =,.793,.33 Invariant set of the weights of the perceptron consists of three hyperplanes. ~ 3 3 Note: I F : R R is not bijective because k Z T x k > w k x k ( ) ( ) ( ) ( ) [ ] T.758,.83,
73 Perceptron training algorithms Class Class w.6 x x w w
74 Conclusions Many digital signal processing systems are symbolic dynamical systems. These symbolic dynamical systems could exhibit fractal, chaotic and divergent behaviors. By investigating the properties of these symbolic dynamical systems, unwanted behaviors could be avoided. 74
75 Q&A Session Thank you! Let me think Bingo 75
Discrete-time Symmetric/Antisymmetric FIR Filter Design
 Discrete-time Symmetric/Antisymmetric FIR Filter Design Presenter: Dr. Bingo Wing-Kuen Ling Center for Digital Signal Processing Research, Department of Electronic Engineering, King s College London. Collaborators
Discrete-time Symmetric/Antisymmetric FIR Filter Design Presenter: Dr. Bingo Wing-Kuen Ling Center for Digital Signal Processing Research, Department of Electronic Engineering, King s College London. Collaborators
Jean Baptiste Joseph Fourier meets Stephen Hawking
 Jean Baptiste Joseph Fourier meets Stephen awking Presenter: Dr. Bingo Wing-Kuen ing incoln School of Engineering, University of incoln Postal address: Brayford Pool, incoln, incolnshire, N6 7S, UK. Email
Jean Baptiste Joseph Fourier meets Stephen awking Presenter: Dr. Bingo Wing-Kuen ing incoln School of Engineering, University of incoln Postal address: Brayford Pool, incoln, incolnshire, N6 7S, UK. Email
Finite Word Length Effects and Quantisation Noise. Professors A G Constantinides & L R Arnaut
 Finite Word Length Effects and Quantisation Noise 1 Finite Word Length Effects Finite register lengths and A/D converters cause errors at different levels: (i) input: Input quantisation (ii) system: Coefficient
Finite Word Length Effects and Quantisation Noise 1 Finite Word Length Effects Finite register lengths and A/D converters cause errors at different levels: (i) input: Input quantisation (ii) system: Coefficient
Oversampling Converters
 Oversampling Converters David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 56 Motivation Popular approach for medium-to-low speed A/D and D/A applications requiring
Oversampling Converters David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 56 Motivation Popular approach for medium-to-low speed A/D and D/A applications requiring
VALLIAMMAI ENGINEERING COLLEGE. SRM Nagar, Kattankulathur DEPARTMENT OF INFORMATION TECHNOLOGY. Academic Year
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
Analysis of Finite Wordlength Effects
 Analysis of Finite Wordlength Effects Ideally, the system parameters along with the signal variables have infinite precision taing any value between and In practice, they can tae only discrete values within
Analysis of Finite Wordlength Effects Ideally, the system parameters along with the signal variables have infinite precision taing any value between and In practice, they can tae only discrete values within
Automatic Control Systems theory overview (discrete time systems)
") Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR. Digital Filter
 Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Signals and Systems. Lecture 11 Wednesday 22 nd November 2017 DR TANIA STATHAKI
 Signals and Systems Lecture 11 Wednesday 22 nd November 2017 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON Effect on poles and zeros on frequency response
Signals and Systems Lecture 11 Wednesday 22 nd November 2017 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON Effect on poles and zeros on frequency response
Designing Information Devices and Systems II Fall 2015 Note 22
 EE 16B Designing Information Devices and Systems II Fall 2015 Note 22 Notes taken by John Noonan (11/12) Graphing of the State Solutions Open loop x(k + 1) = Ax(k) + Bu(k) y(k) = Cx(k) Closed loop x(k
EE 16B Designing Information Devices and Systems II Fall 2015 Note 22 Notes taken by John Noonan (11/12) Graphing of the State Solutions Open loop x(k + 1) = Ax(k) + Bu(k) y(k) = Cx(k) Closed loop x(k
EECE 2150 Circuits and Signals Final Exam Fall 2016 Dec 16
 EECE 2150 Circuits and Signals Final Exam Fall 2016 Dec 16 Instructions: Write your name and section number on all pages Closed book, closed notes; Computers and cell phones are not allowed You can use
EECE 2150 Circuits and Signals Final Exam Fall 2016 Dec 16 Instructions: Write your name and section number on all pages Closed book, closed notes; Computers and cell phones are not allowed You can use
Discrete-Time Signals and Systems. Frequency Domain Analysis of LTI Systems. The Frequency Response Function. The Frequency Response Function
 Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
 UNIT V FINITE WORD LENGTH EFFECTS IN DIGITAL FILTERS PART A 1. Define 1 s complement form? In 1,s complement form the positive number is represented as in the sign magnitude form. To obtain the negative
UNIT V FINITE WORD LENGTH EFFECTS IN DIGITAL FILTERS PART A 1. Define 1 s complement form? In 1,s complement form the positive number is represented as in the sign magnitude form. To obtain the negative
Optimum Ordering and Pole-Zero Pairing. Optimum Ordering and Pole-Zero Pairing Consider the scaled cascade structure shown below
 Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings and ordering Each one
Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings and ordering Each one
Higher-Order Σ Modulators and the Σ Toolbox
 ECE37 Advanced Analog Circuits Higher-Order Σ Modulators and the Σ Toolbox Richard Schreier richard.schreier@analog.com NLCOTD: Dynamic Flip-Flop Standard CMOS version D CK Q Q Can the circuit be simplified?
ECE37 Advanced Analog Circuits Higher-Order Σ Modulators and the Σ Toolbox Richard Schreier richard.schreier@analog.com NLCOTD: Dynamic Flip-Flop Standard CMOS version D CK Q Q Can the circuit be simplified?
Error Spectrum Shaping and Vector Quantization. Jon Dattorro Christine Law
 Error Spectrum Shaping and Vector Quantization Jon Dattorro Christine Law in partial fulfillment of the requirements for EE392c Stanford University Autumn 1997 0. Introduction We view truncation noise
Error Spectrum Shaping and Vector Quantization Jon Dattorro Christine Law in partial fulfillment of the requirements for EE392c Stanford University Autumn 1997 0. Introduction We view truncation noise
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Random processes and probability distributions. Phys 420/580 Lecture 20
 Random processes and probability distributions Phys 420/580 Lecture 20 Random processes Many physical processes are random in character: e.g., nuclear decay (Poisson distributed event count) P (k, τ) =
Random processes and probability distributions Phys 420/580 Lecture 20 Random processes Many physical processes are random in character: e.g., nuclear decay (Poisson distributed event count) P (k, τ) =
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Limit Cycles in High-Resolution Quantized Feedback Systems
 Limit Cycles in High-Resolution Quantized Feedback Systems Li Hong Idris Lim School of Engineering University of Glasgow Glasgow, United Kingdom LiHonIdris.Lim@glasgow.ac.uk Ai Poh Loh Department of Electrical
Limit Cycles in High-Resolution Quantized Feedback Systems Li Hong Idris Lim School of Engineering University of Glasgow Glasgow, United Kingdom LiHonIdris.Lim@glasgow.ac.uk Ai Poh Loh Department of Electrical
An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory
 An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory INA TARALOVA-ROUX AND ORLA FEELY Department of Electronic and Electrical Engineering University
An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory INA TARALOVA-ROUX AND ORLA FEELY Department of Electronic and Electrical Engineering University
Recursive, Infinite Impulse Response (IIR) Digital Filters:
 Digital Filters:") Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
Discrete-time linear systems
 Automatic Control Discrete-time linear systems Prof. Alberto Bemporad University of Trento Academic year 2-2 Prof. Alberto Bemporad (University of Trento) Automatic Control Academic year 2-2 / 34 Introduction
Automatic Control Discrete-time linear systems Prof. Alberto Bemporad University of Trento Academic year 2-2 Prof. Alberto Bemporad (University of Trento) Automatic Control Academic year 2-2 / 34 Introduction
DIGITAL SIGNAL PROCESSING UNIT III INFINITE IMPULSE RESPONSE DIGITAL FILTERS. 3.6 Design of Digital Filter using Digital to Digital
 DIGITAL SIGNAL PROCESSING UNIT III INFINITE IMPULSE RESPONSE DIGITAL FILTERS Contents: 3.1 Introduction IIR Filters 3.2 Transformation Function Derivation 3.3 Review of Analog IIR Filters 3.3.1 Butterworth
DIGITAL SIGNAL PROCESSING UNIT III INFINITE IMPULSE RESPONSE DIGITAL FILTERS Contents: 3.1 Introduction IIR Filters 3.2 Transformation Function Derivation 3.3 Review of Analog IIR Filters 3.3.1 Butterworth
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
CITY UNIVERSITY LONDON. MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746
 No: CITY UNIVERSITY LONDON MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746 Date: 19 May 2004 Time: 09:00-11:00 Attempt Three out of FIVE questions, at least One question from PART B PART
No: CITY UNIVERSITY LONDON MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746 Date: 19 May 2004 Time: 09:00-11:00 Attempt Three out of FIVE questions, at least One question from PART B PART
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Chapter 1. Introduction
 Chapter 1 Introduction 1.1 What is Phase-Locked Loop? The phase-locked loop (PLL) is an electronic system which has numerous important applications. It consists of three elements forming a feedback loop:
Chapter 1 Introduction 1.1 What is Phase-Locked Loop? The phase-locked loop (PLL) is an electronic system which has numerous important applications. It consists of three elements forming a feedback loop:
Data Converter Fundamentals
 Data Converter Fundamentals David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 33 Introduction Two main types of converters Nyquist-Rate Converters Generate output
Data Converter Fundamentals David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 33 Introduction Two main types of converters Nyquist-Rate Converters Generate output
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL
 FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL Miroslav D. Lutovac The University of Belgrade Belgrade, Yugoslavia Dejan V. Tosic The University of Belgrade Belgrade, Yugoslavia Brian
FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL Miroslav D. Lutovac The University of Belgrade Belgrade, Yugoslavia Dejan V. Tosic The University of Belgrade Belgrade, Yugoslavia Brian
Rational Implementation of Distributed Delay Using Extended Bilinear Transformations
 Rational Implementation of Distributed Delay Using Extended Bilinear Transformations Qing-Chang Zhong zhongqc@ieee.org, http://come.to/zhongqc School of Electronics University of Glamorgan United Kingdom
Rational Implementation of Distributed Delay Using Extended Bilinear Transformations Qing-Chang Zhong zhongqc@ieee.org, http://come.to/zhongqc School of Electronics University of Glamorgan United Kingdom
A. Relationship of DSP to other Fields.
 1 I. Introduction 8/27/2015 A. Relationship of DSP to other Fields. Common topics to all these fields: transfer function and impulse response, Fourierrelated transforms, convolution theorem. 2 y(t) = h(
1 I. Introduction 8/27/2015 A. Relationship of DSP to other Fields. Common topics to all these fields: transfer function and impulse response, Fourierrelated transforms, convolution theorem. 2 y(t) = h(
Laplace Transform Analysis of Signals and Systems
 Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
MULTIRATE SYSTEMS. work load, lower filter order, lower coefficient sensitivity and noise,
 MULIRAE SYSEMS ransfer signals between two systems that operate with different sample frequencies Implemented system functions more efficiently by using several sample rates (for example narrow-band filters).
MULIRAE SYSEMS ransfer signals between two systems that operate with different sample frequencies Implemented system functions more efficiently by using several sample rates (for example narrow-band filters).
Filter structures ELEC-E5410
 Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Stabilization of Hyperbolic Chaos by the Pyragas Method
 Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
DISCRETE-TIME SIGNAL PROCESSING
 THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
Chaotifying 2-D piecewise linear maps via a piecewise linear controller function
 Chaotifying 2-D piecewise linear maps via a piecewise linear controller function Zeraoulia Elhadj 1,J.C.Sprott 2 1 Department of Mathematics, University of Tébéssa, (12000), Algeria. E-mail: zeraoulia@mail.univ-tebessa.dz
Chaotifying 2-D piecewise linear maps via a piecewise linear controller function Zeraoulia Elhadj 1,J.C.Sprott 2 1 Department of Mathematics, University of Tébéssa, (12000), Algeria. E-mail: zeraoulia@mail.univ-tebessa.dz
Experiment 13 Poles and zeros in the z plane: IIR systems
 Experiment 13 Poles and zeros in the z plane: IIR systems Achievements in this experiment You will be able to interpret the poles and zeros of the transfer function of discrete-time filters to visualize
Experiment 13 Poles and zeros in the z plane: IIR systems Achievements in this experiment You will be able to interpret the poles and zeros of the transfer function of discrete-time filters to visualize
Physics 106b: Lecture 7 25 January, 2018
 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Visual features: From Fourier to Gabor
 Visual features: From Fourier to Gabor Deep Learning Summer School 2015, Montreal Hubel and Wiesel, 1959 from: Natural Image Statistics (Hyvarinen, Hurri, Hoyer; 2009) Alexnet ICA from: Natural Image Statistics
Visual features: From Fourier to Gabor Deep Learning Summer School 2015, Montreal Hubel and Wiesel, 1959 from: Natural Image Statistics (Hyvarinen, Hurri, Hoyer; 2009) Alexnet ICA from: Natural Image Statistics
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Dither and noise modulation in sigma delta modulators
 Audio Engineering Society Convention Paper Presented at the 5th Convention 003 October 0 3 New York, New York This convention paper has been reproduced from the author's advance manuscript, without editing,
Audio Engineering Society Convention Paper Presented at the 5th Convention 003 October 0 3 New York, New York This convention paper has been reproduced from the author's advance manuscript, without editing,
Principles of Communications
 Principles of Communications Weiyao Lin, PhD Shanghai Jiao Tong University Chapter 4: Analog-to-Digital Conversion Textbook: 7.1 7.4 2010/2011 Meixia Tao @ SJTU 1 Outline Analog signal Sampling Quantization
Principles of Communications Weiyao Lin, PhD Shanghai Jiao Tong University Chapter 4: Analog-to-Digital Conversion Textbook: 7.1 7.4 2010/2011 Meixia Tao @ SJTU 1 Outline Analog signal Sampling Quantization
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Discrete Time Fourier Transform (DTFT)
") Discrete Time Fourier Transform (DTFT) 1 Discrete Time Fourier Transform (DTFT) The DTFT is the Fourier transform of choice for analyzing infinite-length signals and systems Useful for conceptual, pencil-and-paper
Discrete Time Fourier Transform (DTFT) 1 Discrete Time Fourier Transform (DTFT) The DTFT is the Fourier transform of choice for analyzing infinite-length signals and systems Useful for conceptual, pencil-and-paper
Chapter 7: IIR Filter Design Techniques
 IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
UNIVERSITY OF OSLO. Faculty of mathematics and natural sciences. Forslag til fasit, versjon-01: Problem 1 Signals and systems.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
It is common to think and write in time domain. creating the mathematical description of the. Continuous systems- using Laplace or s-
 It is common to think and write in time domain quantities, but this is not the best thing to do in creating the mathematical description of the system we are dealing with. Continuous systems- using Laplace
It is common to think and write in time domain quantities, but this is not the best thing to do in creating the mathematical description of the system we are dealing with. Continuous systems- using Laplace
ECGR4124 Digital Signal Processing Exam 2 Spring 2017
 ECGR4124 Digital Signal Processing Exam 2 Spring 2017 Name: LAST 4 NUMBERS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting NO TEXTBOOK, NO CALCULATOR,
ECGR4124 Digital Signal Processing Exam 2 Spring 2017 Name: LAST 4 NUMBERS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting NO TEXTBOOK, NO CALCULATOR,
ECGR4124 Digital Signal Processing Midterm Spring 2010
 ECGR4124 Digital Signal Processing Midterm Spring 2010 Name: LAST 4 DIGITS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting Open book, 1 sheet front/back
ECGR4124 Digital Signal Processing Midterm Spring 2010 Name: LAST 4 DIGITS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting Open book, 1 sheet front/back
Nonlinear Oscillators: Free Response
 20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
Chapter 12 Variable Phase Interpolation
 Chapter 12 Variable Phase Interpolation Contents Slide 1 Reason for Variable Phase Interpolation Slide 2 Another Need for Interpolation Slide 3 Ideal Impulse Sampling Slide 4 The Sampling Theorem Slide
Chapter 12 Variable Phase Interpolation Contents Slide 1 Reason for Variable Phase Interpolation Slide 2 Another Need for Interpolation Slide 3 Ideal Impulse Sampling Slide 4 The Sampling Theorem Slide
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
On the Dynamics of a n-d Piecewise Linear Map
 EJTP 4, No. 14 2007 1 8 Electronic Journal of Theoretical Physics On the Dynamics of a n-d Piecewise Linear Map Zeraoulia Elhadj Department of Mathematics, University of Tébéssa, 12000, Algeria. Received
EJTP 4, No. 14 2007 1 8 Electronic Journal of Theoretical Physics On the Dynamics of a n-d Piecewise Linear Map Zeraoulia Elhadj Department of Mathematics, University of Tébéssa, 12000, Algeria. Received
INTRODUCTION TO DELTA-SIGMA ADCS
 ECE37 Advanced Analog Circuits INTRODUCTION TO DELTA-SIGMA ADCS Richard Schreier richard.schreier@analog.com NLCOTD: Level Translator VDD > VDD2, e.g. 3-V logic? -V logic VDD < VDD2, e.g. -V logic? 3-V
ECE37 Advanced Analog Circuits INTRODUCTION TO DELTA-SIGMA ADCS Richard Schreier richard.schreier@analog.com NLCOTD: Level Translator VDD > VDD2, e.g. 3-V logic? -V logic VDD < VDD2, e.g. -V logic? 3-V
Review of Linear System Theory
 Review of Linear System Theory The following is a (very) brief review of linear system theory and Fourier analysis. I work primarily with discrete signals. I assume the reader is familiar with linear algebra
Review of Linear System Theory The following is a (very) brief review of linear system theory and Fourier analysis. I work primarily with discrete signals. I assume the reader is familiar with linear algebra
Control Systems. Internal Stability - LTI systems. L. Lanari
 Control Systems Internal Stability - LTI systems L. Lanari outline LTI systems: definitions conditions South stability criterion equilibrium points Nonlinear systems: equilibrium points examples stable
Control Systems Internal Stability - LTI systems L. Lanari outline LTI systems: definitions conditions South stability criterion equilibrium points Nonlinear systems: equilibrium points examples stable
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Automatique. A. Hably 1. Commande d un robot mobile. Automatique. A.Hably. Digital implementation
 A. Hably 1 1 Gipsa-lab, Grenoble-INP ahmad.hably@grenoble-inp.fr Commande d un robot mobile (Gipsa-lab (DA)) ASI 1 / 25 Outline 1 2 (Gipsa-lab (DA)) ASI 2 / 25 of controllers Signals must be sampled and
A. Hably 1 1 Gipsa-lab, Grenoble-INP ahmad.hably@grenoble-inp.fr Commande d un robot mobile (Gipsa-lab (DA)) ASI 1 / 25 Outline 1 2 (Gipsa-lab (DA)) ASI 2 / 25 of controllers Signals must be sampled and
Nonsmooth systems: synchronization, sliding and other open problems
 John Hogan Bristol Centre for Applied Nonlinear Mathematics, University of Bristol, England Nonsmooth systems: synchronization, sliding and other open problems 2 Nonsmooth Systems 3 What is a nonsmooth
John Hogan Bristol Centre for Applied Nonlinear Mathematics, University of Bristol, England Nonsmooth systems: synchronization, sliding and other open problems 2 Nonsmooth Systems 3 What is a nonsmooth
Roundoff Noise in Digital Feedback Control Systems
 Chapter 7 Roundoff Noise in Digital Feedback Control Systems Digital control systems are generally feedback systems. Within their feedback loops are parts that are analog and parts that are digital. At
Chapter 7 Roundoff Noise in Digital Feedback Control Systems Digital control systems are generally feedback systems. Within their feedback loops are parts that are analog and parts that are digital. At
The Discrete-time Fourier Transform
 The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
The Discrete-Time Fourier
 Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Methods for Synthesizing Very High Q Parametrically Well Behaved Two Pole Filters
 Methods for Synthesizing Very High Q Parametrically Well Behaved Two Pole Filters Max Mathews Julius O. Smith III Center for Computer Research in Music and Acoustics (CCRMA) Department of Music, Stanford
Methods for Synthesizing Very High Q Parametrically Well Behaved Two Pole Filters Max Mathews Julius O. Smith III Center for Computer Research in Music and Acoustics (CCRMA) Department of Music, Stanford
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Communication constraints and latency in Networked Control Systems
 Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
 Final Exam (2011) solutions") MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems
 What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems Michael Peter Kennedy FIEEE University College Cork, Ireland 2013 IEEE CAS Society, Santa Clara Valley Chapter 05 August
What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems Michael Peter Kennedy FIEEE University College Cork, Ireland 2013 IEEE CAS Society, Santa Clara Valley Chapter 05 August
Implementation of Digital Chaotic Signal Generator Based on Reconfigurable LFSRs for Multiple Access Communications
 Australian Journal of Basic and Applied Sciences, 4(7): 1691-1698, 2010 ISSN 1991-8178 Implementation of Digital Chaotic Signal Generator Based on Reconfigurable LFSRs for Multiple Access Communications
Australian Journal of Basic and Applied Sciences, 4(7): 1691-1698, 2010 ISSN 1991-8178 Implementation of Digital Chaotic Signal Generator Based on Reconfigurable LFSRs for Multiple Access Communications
 IT6502 DIGITAL SIGNAL PROCESSING Unit I - SIGNALS AND SYSTEMS Basic elements of DSP concepts of frequency in Analo and Diital Sinals samplin theorem Discrete time sinals, systems Analysis of discrete time
IT6502 DIGITAL SIGNAL PROCESSING Unit I - SIGNALS AND SYSTEMS Basic elements of DSP concepts of frequency in Analo and Diital Sinals samplin theorem Discrete time sinals, systems Analysis of discrete time
Second and Higher-Order Delta-Sigma Modulators
 Second and Higher-Order Delta-Sigma Modulators MEAD March 28 Richard Schreier Richard.Schreier@analog.com ANALOG DEVICES Overview MOD2: The 2 nd -Order Modulator MOD2 from MOD NTF (predicted & actual)
Second and Higher-Order Delta-Sigma Modulators MEAD March 28 Richard Schreier Richard.Schreier@analog.com ANALOG DEVICES Overview MOD2: The 2 nd -Order Modulator MOD2 from MOD NTF (predicted & actual)
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
MIT 2.71/2.710 Optics 10/31/05 wk9-a-1. The spatial frequency domain
 10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
Correlator I. Basics. Chapter Introduction. 8.2 Digitization Sampling. D. Anish Roshi
 Chapter 8 Correlator I. Basics D. Anish Roshi 8.1 Introduction A radio interferometer measures the mutual coherence function of the electric field due to a given source brightness distribution in the sky.
Chapter 8 Correlator I. Basics D. Anish Roshi 8.1 Introduction A radio interferometer measures the mutual coherence function of the electric field due to a given source brightness distribution in the sky.
Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) Week 1: 8/26, 8/28 Week 2: 9/2, 9/4
 Week 1: 8/26, 8/28 Week 2: 9/2, 9/4") IMGS 616-20141 p.1 Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) 3 July 2014 (TENTATIVE and subject to change) Note that I expect to be in Europe twice during the term: in Paris the week
IMGS 616-20141 p.1 Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) 3 July 2014 (TENTATIVE and subject to change) Note that I expect to be in Europe twice during the term: in Paris the week
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012
 The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012 Time: 3 hours. Close book, closed notes. No calculators. Part I: ANSWER ALL PARTS. WRITE
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012 Time: 3 hours. Close book, closed notes. No calculators. Part I: ANSWER ALL PARTS. WRITE
Support Vector Machine. Industrial AI Lab. Prof. Seungchul Lee
 Support Vector Machine Industrial AI Lab. Prof. Seungchul Lee Classification (Linear) Autonomously figure out which category (or class) an unknown item should be categorized into Number of categories /
Support Vector Machine Industrial AI Lab. Prof. Seungchul Lee Classification (Linear) Autonomously figure out which category (or class) an unknown item should be categorized into Number of categories /
Lecture 3 January 23
 EE 123: Digital Signal Processing Spring 2007 Lecture 3 January 23 Lecturer: Prof. Anant Sahai Scribe: Dominic Antonelli 3.1 Outline These notes cover the following topics: Eigenvectors and Eigenvalues
EE 123: Digital Signal Processing Spring 2007 Lecture 3 January 23 Lecturer: Prof. Anant Sahai Scribe: Dominic Antonelli 3.1 Outline These notes cover the following topics: Eigenvectors and Eigenvalues
The Nonlinear Pendulum
 The Nonlinear Pendulum Evan Sheridan 11367741 Feburary 18th 013 Abstract Both the non-linear linear pendulum are investigated compared using the pendulum.c program that utilizes the trapezoid method for
The Nonlinear Pendulum Evan Sheridan 11367741 Feburary 18th 013 Abstract Both the non-linear linear pendulum are investigated compared using the pendulum.c program that utilizes the trapezoid method for
Sampling and Discrete Time. Discrete-Time Signal Description. Sinusoids. Sampling and Discrete Time. Sinusoids An Aperiodic Sinusoid.
 Sampling and Discrete Time Discrete-Time Signal Description Sampling is the acquisition of the values of a continuous-time signal at discrete points in time. x t discrete-time signal. ( ) is a continuous-time
Sampling and Discrete Time Discrete-Time Signal Description Sampling is the acquisition of the values of a continuous-time signal at discrete points in time. x t discrete-time signal. ( ) is a continuous-time
Design of Narrow Stopband Recursive Digital Filter
 FACTA UNIVERSITATIS (NIŠ) SER.: ELEC. ENERG. vol. 24, no. 1, April 211, 119-13 Design of Narrow Stopband Recursive Digital Filter Goran Stančić and Saša Nikolić Abstract: The procedure for design of narrow
FACTA UNIVERSITATIS (NIŠ) SER.: ELEC. ENERG. vol. 24, no. 1, April 211, 119-13 Design of Narrow Stopband Recursive Digital Filter Goran Stančić and Saša Nikolić Abstract: The procedure for design of narrow
I NONLINEAR EWORKBOOK
 I NONLINEAR EWORKBOOK Chaos, Fractals, Cellular Automata, Neural Networks, Genetic Algorithms, Gene Expression Programming, Wavelets, Fuzzy Logic with C++, Java and SymbolicC++ Programs Willi-Hans Steeb
I NONLINEAR EWORKBOOK Chaos, Fractals, Cellular Automata, Neural Networks, Genetic Algorithms, Gene Expression Programming, Wavelets, Fuzzy Logic with C++, Java and SymbolicC++ Programs Willi-Hans Steeb
Filter Banks II. Prof. Dr.-Ing. G. Schuller. Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany
 Filter Banks II Prof. Dr.-Ing. G. Schuller Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany Page Modulated Filter Banks Extending the DCT The DCT IV transform can be seen as modulated
Filter Banks II Prof. Dr.-Ing. G. Schuller Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany Page Modulated Filter Banks Extending the DCT The DCT IV transform can be seen as modulated
CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems
 CDS 101 1. Åström and Murray, Exercise 1.3 2. Åström and Murray, Exercise 1.4 3. Åström and Murray, Exercise 2.6, parts (a) and (b) CDS 110a 1. Åström and Murray, Exercise 1.4 2. Åström and Murray, Exercise
CDS 101 1. Åström and Murray, Exercise 1.3 2. Åström and Murray, Exercise 1.4 3. Åström and Murray, Exercise 2.6, parts (a) and (b) CDS 110a 1. Åström and Murray, Exercise 1.4 2. Åström and Murray, Exercise
4.0 Update Algorithms For Linear Closed-Loop Systems
 4. Update Algorithms For Linear Closed-Loop Systems A controller design methodology has been developed that combines an adaptive finite impulse response (FIR) filter with feedback. FIR filters are used
4. Update Algorithms For Linear Closed-Loop Systems A controller design methodology has been developed that combines an adaptive finite impulse response (FIR) filter with feedback. FIR filters are used
Recent Advances in Consensus of Multi-Agent Systems
 Int. Workshop on Complex Eng. Systems and Design, Hong Kong, 22 May 2009 Recent Advances in Consensus of Multi-Agent Systems Jinhu Lü Academy of Mathematics and Systems Science Chinese Academy of Sciences
Int. Workshop on Complex Eng. Systems and Design, Hong Kong, 22 May 2009 Recent Advances in Consensus of Multi-Agent Systems Jinhu Lü Academy of Mathematics and Systems Science Chinese Academy of Sciences
encoding without prediction) (Server) Quantization: Initial Data 0, 1, 2, Quantized Data 0, 1, 2, 3, 4, 8, 16, 32, 64, 128, 256
 (Server) Quantization: Initial Data 0, 1, 2, Quantized Data 0, 1, 2, 3, 4, 8, 16, 32, 64, 128, 256") General Models for Compression / Decompression -they apply to symbols data, text, and to image but not video 1. Simplest model (Lossless ( encoding without prediction) (server) Signal Encode Transmit (client)
General Models for Compression / Decompression -they apply to symbols data, text, and to image but not video 1. Simplest model (Lossless ( encoding without prediction) (server) Signal Encode Transmit (client)
Principles of Communications
 Principles of Communications Chapter V: Representation and Transmission of Baseband Digital Signal Yongchao Wang Email: ychwang@mail.xidian.edu.cn Xidian University State Key Lab. on ISN November 18, 2012
Principles of Communications Chapter V: Representation and Transmission of Baseband Digital Signal Yongchao Wang Email: ychwang@mail.xidian.edu.cn Xidian University State Key Lab. on ISN November 18, 2012
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Parameter Derivation of Type-2 Discrete-Time Phase-Locked Loops Containing Feedback Delays
 Parameter Derivation of Type- Discrete-Time Phase-Locked Loops Containing Feedback Delays Joey Wilson, Andrew Nelson, and Behrouz Farhang-Boroujeny joey.wilson@utah.edu, nelson@math.utah.edu, farhang@ece.utah.edu
Parameter Derivation of Type- Discrete-Time Phase-Locked Loops Containing Feedback Delays Joey Wilson, Andrew Nelson, and Behrouz Farhang-Boroujeny joey.wilson@utah.edu, nelson@math.utah.edu, farhang@ece.utah.edu
WHAT IS A CHAOTIC ATTRACTOR?
 WHAT IS A CHAOTIC ATTRACTOR? CLARK ROBINSON Abstract. Devaney gave a mathematical definition of the term chaos, which had earlier been introduced by Yorke. We discuss issues involved in choosing the properties
WHAT IS A CHAOTIC ATTRACTOR? CLARK ROBINSON Abstract. Devaney gave a mathematical definition of the term chaos, which had earlier been introduced by Yorke. We discuss issues involved in choosing the properties
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals. 1. Sampling and Reconstruction 2. Quantization
 ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.