Resource Sharing, Routing, Chip Design. Jens Vygen
|
|
|
- Shannon Harrison
- 5 years ago
- Views:
Transcription
1 Resource Sharing, Routing, Chip Design Jens Vygen University of Bonn joint work with Markus Ahrens, Michael Gester, Stephan Held, Niko Klewinghaus, Dirk Müller, Tim Nieberg, Christian Panten, Sven Peyer, Klaus Radke, Daniel Rotter, Pietro Saccardi, Rudolf Scheifele, Christian Schulte, Gustavo Tellez, Vera Traub, et al.
2 Chip design: placement telecommunication chip with 1 billion transistors 8 million circuits

3 Chip design: routing 9 routing layers 30 million pins million nets million wire segments million vias 1 kilometer total wire length
4 Combinatorial optimization in chip design shortest paths, TSP, spanning trees, Steiner trees rectangle packing, knapsack problem, bin packing facility location, partitioning, clustering maximum flows, discrete time-cost tradeoff problem minimum mean cycles, parametric shortest paths transportation and minimum cost flows multicommodity flows, disjoint paths and trees, resource sharing






5 The BonnTools, I developed by our group at the University of Bonn, I cover all major areas of layout and timing optimization, I include libraries for combinatorial optimization, advanced, data structures, computational geometry, etc., I have more than one million lines of C++ code, I are being used worldwide by IBM and other companies, I have been used for the design of thousands of chips, I including several complete microprocessor series I and the most complex chips of major technology companies.
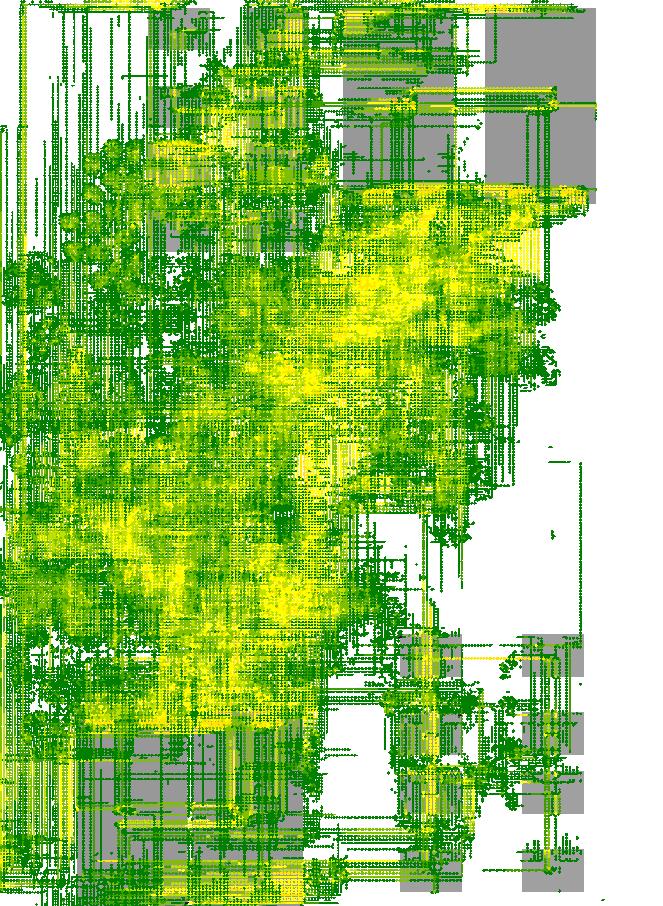
6 Detail of the routing (less than one millionth)
7 Detail of the routing (less than one millionth) Vias
")
8 Detail of the routing (less than one millionth) Vias
9 Routing: task Instance: a number of routing planes a set of nets, where each net is a set of pins (terminals) a set of shapes for each pin a set of blockage shapes rules that tell if two given shapes are connected, separated Task: Compute a feasible routing, i.e., a set of wire shapes for each net, connecting the pins, separate from blockages and shapes of other nets
10 Routing: task Instance: a number of routing planes a set of nets, where each net is a set of pins (terminals) a set of shapes for each pin a set of blockage shapes rules that tell if two given shapes are connected, separated timing constraints information on power consumption, yield,... Task: Compute a feasible routing, i.e., a set of wire shapes for each net, connecting the pins, separate from blockages and shapes of other nets such that all timing constraints are met and the (estimated) power consumption and/or manufacturing cost is minimized.
11 Routing: simplified view Find vertex-disjoint Steiner trees connecting given terminal sets in a 3-dimensional grid graph. NP-hard: no polynomial-time algorithm unless P = NP Order of magnitude: 10 million Steiner trees in a graph with 500 billion vertices Even linear-time algorithms are too slow!
12 Global and detailed routing Routing is usually performed in three phases: Global routing: performs global optimization, determines a routing area (corridor) for each net, but no detailed view Detailed routing: constructs wires connecting each net within this corridor, respecting all design rules necessary for the lithographic process in fabrication Postoptimization: fix remaining violated constraints, improve the wiring by spreading and do some postprocessing for more robust manufacturing Graphs are huge: vertices in detailed routing, still vertices in global routing.

13 Detailed routing in global routing corridor
14 Global routing: classical model In each routing plane: contract regions of approx. 70x70 tracks to a single vertex compute capacities of edges between adjacent regions pack Steiner trees with respect to these edge capacities global optimization of objective functions Steiner tree yields routing corridor for each net Detailed routing computes detailed wires in these corridors by fast goal-oriented variants of Dijkstra s algorithm and optimal pin access (Hetzel [1998], Müller [2009], Peyer, Rautenbach, Vygen [2009], Klewinghaus [2013], Gester et al. [2013], Ahrens et al. [2015],...)
15 Global routing: classical problem formulation Instance: a global routing (grid) graph with edge capacities a set of nets, each consisting of a set of vertices (terminals) Task: find a Steiner tree for each net such that the edge capacities are respected, and (weighted) netlength is minimum.
16 Simple example edge-disjoint paths problem 3 terminal pairs: blue, red, green each terminal pair has demand 1 each edge has capacity
17 Simple example edge-disjoint paths problem 3 terminal pairs: blue, red, green each terminal pair has demand 1 each edge has capacity 1 no solution exists edge-disjoint paths problem is NP-hard (even in planar grids) 01 01
18 Simple example edge-disjoint paths problem 3 terminal pairs: blue, red, green each terminal pair has demand 1 each edge has capacity 1 no solution exists fractional solution exists (route 1 2 along each colored path) edge-disjoint paths problem is NP-hard (even in planar grids) fractional relaxation can be solved in polynomial time by linear programming (but not fast enough) 01 01
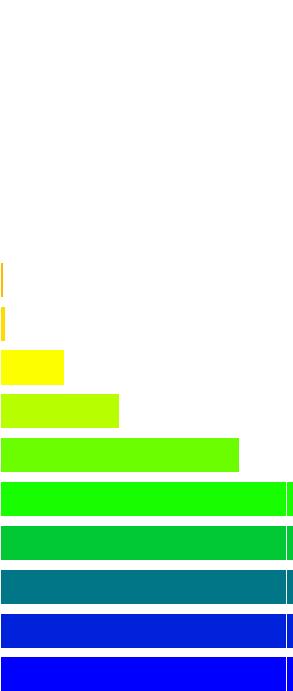
19 Real example: global routing congestion map
20 Min-max resource sharing Instance finite sets R of resources and C of customers for each c C: a set B c R R 0 of feasible solutions Task Find a b c B c for each c C with minimum congestion (b c ) r. max r R c C
21 Min-max resource sharing Instance finite sets R of resources and C of customers for each c C: a set B c R R 0 of feasible solutions given by an oracle function f c : R R 0 B c with Task y r (f c (y)) r r R σ inf b B c r R y r b r for all price vectors y R R 0 and some fixed σ 1 (a σ-approximate oracle). Find a b c B c for each c C with minimum congestion (b c ) r. max r R c C
22 Min-max resource sharing Instance finite sets R of resources and C of customers for each c C: a set B c R R 0 of feasible solutions given by an oracle function f c : R R 0 B c with Task y r (f c (y)) r r R σ inf b B c r R y r b r for all price vectors y R R 0 and some fixed σ 1 (a σ-approximate oracle). Find a b c conv(b c ) for each c C with minimum congestion max r R (b c ) r. c C
23 Resource sharing for global routing Each net is a customer. Define a resource r (with a capacity cap(r)) for each edge of the global routing graph the total power consumption the critical area (for estimating the yield loss) each edge of the timing propagation graph For each net c, let B c contain, for each routing solution s for c, the vector ( usg(s,r) ) cap(r) where usg(s, r) tells how much s uses from r. r R We look for a solution with congestion at most 1. An objective function can be viewed as an additional resource (determine its capacity by binary search).
24 Rounding A solution to the min-max resource sharing instance is a convex combination b B c p b b of solutions for each net c (p b 0 (b B c ), b B c p b = 1) However, we need a single solution for each net. Use randomized rounding: randomly choose b with probability p b, independently for each net. (Raghavan, Thompson [1987,1991], Raghavan [1988]) If no solution consumes very much of any capacity, this yields a solution that exceeds capacities only slightly. New rounding and correction algorithms even better?
25 Algorithms for min-max resource sharing oracle # oracle calls Grigoriadis, Khachiyan [1994] strong, bounded Õ(ω 2 C 2 ) Grigoriadis, Khachiyan [1994] strong, bounded Õ(ω 2 C ) random. Grigoriadis, Khachiyan [1996] strong, unbounded Õ(ω 2 C R ) Jansen, Zhang [2008] weak, unbounded Õ(ω 2 C R ) Müller, Radke, Vygen [2011] weak, unbounded Õ(ω 2 ( C + R )) Müller, Radke, Vygen [2011] weak, bounded Õ(ω 2 C ) All these algorithms and predecessors for special cases (Plotkin, Shmoys, Tardos [1995], Young [1995], Villavicencio, Grigoriadis [1996], Garg, Könemann [2007],...) compute a σ(1 + ω)-approximate solution for any given ω > 0. Running times dominated by number of oracle calls. Logarithmic terms and dependency on σ omitted. For a strong oracle, σ can be chosen arbitrarily close to 1. A bounded oracle respects a given upper bound on resource usage.
26 Algorithms for min-max resource sharing oracle # oracle calls Grigoriadis, Khachiyan [1994] strong, bounded Õ(ω 2 C 2 ) Grigoriadis, Khachiyan [1994] strong, bounded Õ(ω 2 C ) random. Grigoriadis, Khachiyan [1996] strong, unbounded Õ(ω 2 C R ) Jansen, Zhang [2008] weak, unbounded Õ(ω 2 C R ) Müller, Radke, Vygen [2011] weak, unbounded Õ(ω 2 ( C + R )) Müller, Radke, Vygen [2011] weak, bounded Õ(ω 2 C ) All these algorithms and predecessors for special cases (Plotkin, Shmoys, Tardos [1995], Young [1995], Villavicencio, Grigoriadis [1996], Garg, Könemann [2007],...) compute a σ(1 + ω)-approximate solution for any given ω > 0. Running times dominated by number of oracle calls. Logarithmic terms and dependency on σ omitted. For a strong oracle, σ can be chosen arbitrarily close to 1. A bounded oracle respects a given upper bound on resource usage.
27 Weak duality Let { λ := inf max r R (the optimum congestion ). } (b c ) r : b c B c (c C) c C Lemma (Weak duality) Let y R R 0 be some price vector, not all-zero, and opt c (y) := inf b Bc r R y r b r. Then c C opt c (y) r R y λ. r
28 Weak duality Let { λ := inf max r R (the optimum congestion ). } (b c ) r : b c B c (c C) c C Lemma (Weak duality) Let y R R 0 be some price vector, not all-zero, and opt c (y) := inf b Bc r R y r b r. Then c C opt c (y) r R y λ. r Proof Let (b c B c ) c C be a solution with congestion (1 + δ)λ. Then c C opt c (y) c C r R y r R y r (b c ) r r R r r R y = y r c C (b c) r r r R y r r R y r (1 + δ)λ r R y = (1 + δ)λ. r
29 Bounding λ Lemma (Weak duality) Let y R R 0 be some price vector, not all-zero. Then c C opt c (y) r R y λ. r
30 Bounding λ Lemma (Weak duality) Let y R R 0 be some price vector, not all-zero. Then c C opt c (y) r R y λ. r Corollary Let b c := f c (1) (c C) and λ ub := max r R c C (b c) r. Then λ ub R σ r R c C (b c) r R σ c C opt c (1) λ λ ub. R
31 Scaling We know λub R σ λ λ ub.
32 Scaling We know λub R σ λ λ ub. 1. Set j := Scale B (j) c := { 2j λ ub b : b B c }. Note that λ (j) 1.
33 Scaling We know λub R σ λ λ ub. 1. Set j := Scale B (j) c := { 2j λ ub b : b B c }. Note that λ (j) Find a solution with congestion λ (j) 5 4 σλ (j)
34 Scaling We know λub R σ λ λ ub. 1. Set j := Scale B (j) c := { 2j b : b B λ ub c }. Note that λ (j) Find a solution with congestion λ (j) 5 4 σλ (j) If λ (j) 1 2, then increment j and go to 2.
35 Scaling We know λub R σ λ λ ub. 1. Set j := Scale B (j) c := { 2j b : b B λ ub c }. Note that λ (j) Find a solution with congestion λ (j) 5 4 σλ (j) If λ (j) 1 2, then increment j and go to Now 1 5σ λ (j) Find a solution with congestion λ (j) σ(1 + ω 2 )λ (j) + ω 10 (hence at most σ(1 + ω) times the optimum).
36 Scaling We know λub R σ λ λ ub. 1. Set j := Scale B (j) c := { 2j b : b B λ ub c }. Note that λ (j) Find a solution with congestion λ (j) 5 4 σλ (j) If λ (j) 1 2, then increment j and go to Now 1 5σ λ (j) Find a solution with congestion λ (j) σ(1 + ω 2 )λ (j) + ω 10 (hence at most σ(1 + ω) times the optimum). Lemma (Main Lemma) Let δ, δ > 0. Suppose that λ 1. Then we can compute a solution with congestion at most σ(1 + δ)λ + δ in ( ) O (δδ ) 1 ( C + R ) θ log R time, where θ is the time for an oracle call.
37 Core algorithm ( multiplicative weights method ) Input: An instance of the min-max resource sharing problem. Output: A convex combination of vectors in B c for each c C. t := 3σ ln R δδ, ɛ := δ 3σ. α r := 0, y r := 1 for each r R. x c,b := 0 for each c C and b B c. For p := 1 to t do: For c C do: b := f c (y). (perform t phases) (call oracle) x c,b := x c,b + 1. (record solution) α := α + b. (update resource consumption) For each r R with b r 0 do: y r := e ɛαr. (update prices) x c,b := 1 t x c,b for each c C and b B c. (normalize)
38 Core algorithm ( multiplicative weights method ) Input: An instance of the min-max resource sharing problem. Output: A convex combination of vectors in B c for each c C. t := 3σ ln R δδ, ɛ := δ 3σ. α r := 0, y r := 1 for each r R. x c,b := 0, X c := 0 for each c C and b B c. For p := 1 to t do: (perform t phases) While there exists c C with X c < p do: b := f c (y). (call oracle) ξ := min{p X c, 1/ max{b r : r R}}. x c,b := x c,b + ξ, X c := X c + ξ. (record solution) α := α + ξb. (update resource consumption) For each r R with b r 0 do: y r := e ɛαr. (update prices) x c,b := 1 t x c,b for each c C and b B c. (normalize)
39 Proof of performance guarantee (sketch) Lemma Let (x, y) be the output of the algorithm with congestion λ := max r R λ r, where λ r := ( ) x c,b b r c C b B c Then λ 1 ( ɛt ln y r ). r R
40 Proof of performance guarantee (sketch) Lemma Let (x, y) be the output of the algorithm with congestion λ := max r R λ r, where λ r := ( ) x c,b b r c C b B c Then λ 1 ( ɛt ln y r ). r R Proof: For r R: λ r = x c,b b r = α r t c C b B c = 1 ɛt ln (eɛαr ) = 1 ɛt ln y r 1 ( ɛt ln y r ). r R
41 Proof of performance guarantee (sketch) Lemma (Main Lemma) Let δ, δ > 0. Suppose that ɛ λ < 1, where ɛ := (e ɛ 1)σ. Then the algorithm computes a solution with congestion at most σ(1 + δ)λ + δ.
42 Proof of performance guarantee (sketch) Lemma (Main Lemma) Let δ, δ > 0. Suppose that ɛ λ < 1, where ɛ := (e ɛ 1)σ. Then the algorithm computes a solution with congestion at most Sketch of proof: σ(1 + δ)λ + δ. Congestion is at most 1 ɛt ln ( r R y (t) r ). where y (i) is the price vector at the end of the i-th phase.
43 Proof of performance guarantee (sketch) Lemma (Main Lemma) Let δ, δ > 0. Suppose that ɛ λ < 1, where ɛ := (e ɛ 1)σ. Then the algorithm computes a solution with congestion at most σ(1 + δ)λ + δ. Sketch of proof: ( ) Congestion is at most 1 ɛt ln r R y (t) r. ( ) Initially, we have r R y (0) r = R. where y (i) is the price vector at the end of the i-th phase.
44 Proof of performance guarantee (sketch) Lemma (Main Lemma) Let δ, δ > 0. Suppose that ɛ λ < 1, where ɛ := (e ɛ 1)σ. Then the algorithm computes a solution with congestion at most σ(1 + δ)λ + δ. Sketch of proof: ( ) Congestion is at most 1 ɛt ln r R y (t) r. ( ) Initially, we have r R y (0) r = R. Price y r multiplied by e ɛξbr Short calculation yields y (p) r y (p 1) r + ɛ opt c (y (p) ), r R c C r R (1 + (e ɛ 1)ξb r ) in each iteration. where y (i) is the price vector at the end of the i-th phase.
45 Proof of performance guarantee (sketch) We had r R y (p) r r R y (p 1) r + ɛ c C opt c (y (p) ).
46 Proof of performance guarantee (sketch) We had r R r R By weak duality, ɛ c C opt c (y (p) ) r R y (p) We get y (p) r r R y (p) r y (p 1) r + ɛ c C opt c (y (p) ). r ɛ λ < ɛ λ r R y (p 1) r
47 Proof of performance guarantee (sketch) We had r R r R By weak duality, ɛ c C opt c (y (p) ) r R y (p) We get and thus r R y (t) r y (p) r r R y (p) r y (p 1) r + ɛ c C opt c (y (p) ). r ɛ λ < ɛ λ r R y (p 1) r R (1 ɛ λ ) t = R (1 + ɛ λ ) t 1 ɛ λ R e tɛ λ /(1 ɛ λ ).
48 Proof of performance guarantee (sketch) We had r R r R By weak duality, ɛ c C opt c (y (p) ) r R y (p) We get and thus r R y (t) r y (p) r r R y (p) r y (p 1) r + ɛ c C opt c (y (p) ). r ɛ λ < ɛ λ r R y (p 1) r R (1 ɛ λ ) t = R (1 + ɛ λ ) t 1 ɛ λ R e tɛ λ /(1 ɛ λ ). Together with λ 1 ɛt ln( r R y (t) ) r, this proves the claim.
49 Number of oracle calls After each oracle call either X c = p (happens only t C times) or ξb r = 1 for some r R (increases the price of r by e ɛ ). Hence the number of oracle calls is ( ) O (δδ ) 1 ( C + R ) log R.
50 Number of oracle calls After each oracle call either X c = p (happens only t C times) or ξb r = 1 for some r R (increases the price of r by e ɛ ). Hence the number of oracle calls is ( ) O (δδ ) 1 ( C + R ) log R. The above scaling algorithm computes a σ(1 + ω)-approximate solution in O((ω 2 + log R )( C + R ) θ log R ) time, where θ is the time for an oracle call.
51 Main result The above scaling algorithm computes a σ(1 + ω)-approximate solution in O((ω 2 + log R )( C + R ) θ log R ) time.
52 Main result The above scaling algorithm computes a σ(1 + ω)-approximate solution in O((ω 2 + log R )( C + R ) θ log R ) time. Using binary search instead of simple scaling, and a variant of the Main Lemma in which λ 1 is not guaranteed, we obtain: Theorem We can compute a σ(1 + ω)-approximate solution in O((ω 2 + log log R )( C + R ) θ log R ) time. Faster and more general than all previous algorithms!
53 Main result The above scaling algorithm computes a σ(1 + ω)-approximate solution in O((ω 2 + log R )( C + R ) θ log R ) time. Using binary search instead of simple scaling, and a variant of the Main Lemma in which λ 1 is not guaranteed, we obtain: Theorem We can compute a σ(1 + ω)-approximate solution in O((ω 2 + log log R )( C + R ) θ log R ) time. Faster and more general than all previous algorithms! Extensions for practical application: Most oracle calls not necessary; reuse previous result if still good enough. Use lower bounds to decide Speed-up heuristics, fast approximate oracles Parallelization (without loss of theoretical guarantees!)
54 The algorithm in practice In practice, results are much better than theoretical performance guarantees. Usually iterations suffice. Only few constraints are violated (even after rounding); these are corrected easily by ripup-and-reroute. Detailed routing can realize the solution well, due to good capacity estimations. Small integrality gap and approximate dual solution infeasibility proof can be found for most infeasible instances New constraints can be added easily Open problems: What if one resource is very bad? Guarantee for the rest? Warmstart with good prices?
55 Near optimality chip ɛ = 100 λ t fract λ lb λ rounded λ final % gap % gap running (# nets) (fract.) (final) time Rose :01:45 ( ) :01: :00:28 Georg :02:38 ( ) :01: :00:49 Camilla :51:09 ( ) :33: :11:23 Tomoko :23:43 ( ) :15: :07:09 Andre :18:54 ( ) :50: :17:32

56 Global routing result for the telecommunication chip
57 Overall result: comparison to an industrial router Time (h:mm:ss) Wires Vias Scenic nets Errors BonnRoute Total (m) 25% 50% 100% Industrial 9:18: Bonn 1:17:35 3:55: % -10.3% -22.6% -93.9% -98.4% -98.9% -61.1% 14 nm testbed (14 instances with a total of nets) both routers with 20 threads BonnRoute followed by industrial cleanup tool
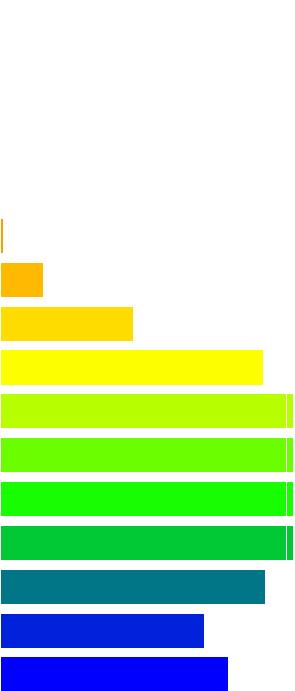
58 Congestion map of a difficult instance 110% 100% 94% 87% 76% 60% 30% 0% CRB_PCL RESEARCH INSTITUTE FOR DISCRETE MATHEMATICS, UNIVERSITY OF BONN
59 Modeling timing constraints via dynamic delay budgets Timing constraints are modeled by an acyclic digraph Arrival times at sources and latest allowed arrival times at sinks are given Delays on arcs depend on routing solution Add a resource for each of these arcs Add new customers for determining arrival times at intermediate vertices Results in dynamic delay budgets v 1 v 2 v 3 v 4 N1 N 2 N 3 usg(n 1 ) resource capacity usg(n 3 ) usg(v 2 ) usg(n 2 ) usg(v 2 ) a(v 2 ) a(v 3 ) a(v 1 ) a min (v 2 ) a max(v 2 ) a min (v 3 ) a max(v 3 ) a(v 4 )
60 Theorem (Held, Müller, Rotter, Traub, Vygen [2015]) Let ω > 0. (a) Given a σ-approximate routing oracle, we can compute, with Õ(ω 2 (C + R )) oracle calls, a solution that minimizes the congestion up to a factor σ(1 + ω). (b) For nets with a bounded number of pins, we can obtain σ = 1 in polynomial time. Then, if there is a solution that satisfies all constraints, we get a solution that overloads edges by at most a factor 1 + ω and violates timing constraints by at most ω h, where h is a constant that depends on the instance only. Sketch of proof: Oracle for arrival time customers is trivial Resource sharing algorithm yields (a) Routing oracle for routing a net based on Dijkstra-Steiner algorithm (Hougardy, Silvanus, Vygen [2017]) Increase capacities of timing resources so that all source-sink paths have the same capacity h.






61 Experimental results Bounds Industrial Our algorithm after... timing- routing- tool iteration iteration iteration rounding unaware unaware (heuristic) (final)

62 Conclusion: mathematics leads to better chips! D. Müller, K. Radke, J. Vygen: Faster min-max resource sharing in theory and practice. Mathematical Programming Computation 3 (2011), 1 35 M. Gester, D. Müller, T. Nieberg, C. Panten, C. Schulte, J. Vygen: BonnRoute: Algorithms and data structures for fast and good VLSI routing. ACM Transactions on Design Automation of Electronic Systems 18 (2013), Article 32 S. Held, D. Müller, D. Rotter, V. Traub, J. Vygen: Global routing with inherent static timing constraints. Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD, 2015), S. Hougardy, J. Silvanus, J. Vygen: Dijkstra meets Steiner: a fast exact goal-oriented Steiner tree algorithm. Mathematical Programming Computation 9 (2017), to appear
Faster Min-Max Resource Sharing in Theory and Practice
 Faster Min-Max Resource Sharing in Theory and Practice Dirk Müller 1 Klaus Radke 2 Jens Vygen 1 Abstract We consider the (block-angular) min-max resource sharing problem, which is defined as follows. Given
Faster Min-Max Resource Sharing in Theory and Practice Dirk Müller 1 Klaus Radke 2 Jens Vygen 1 Abstract We consider the (block-angular) min-max resource sharing problem, which is defined as follows. Given
Steiner Trees in Chip Design. Jens Vygen. Hangzhou, March 2009
 Steiner Trees in Chip Design Jens Vygen Hangzhou, March 2009 Introduction I A digital chip contains millions of gates. I Each gate produces a signal (0 or 1) once every cycle. I The output signal of a
Steiner Trees in Chip Design Jens Vygen Hangzhou, March 2009 Introduction I A digital chip contains millions of gates. I Each gate produces a signal (0 or 1) once every cycle. I The output signal of a
Multicommodity Flows and Column Generation
 Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
- Well-characterized problems, min-max relations, approximate certificates. - LP problems in the standard form, primal and dual linear programs
 LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source Shortest
CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source Shortest
Fast and Simple Approximation Algorithms for Generalized Flow
 Fast and Simple Approximation Algorithms for Generalized Flow (flow with losses and gains) Kevin Wayne Princeton University www.cs.princeton.edu/ wayne (with Lisa Fleischer) γ =3/4 40 v w 30 Fast and Simple
Fast and Simple Approximation Algorithms for Generalized Flow (flow with losses and gains) Kevin Wayne Princeton University www.cs.princeton.edu/ wayne (with Lisa Fleischer) γ =3/4 40 v w 30 Fast and Simple
Integer Linear Programming (ILP)
") Integer Linear Programming (ILP) Zdeněk Hanzálek, Přemysl Šůcha hanzalek@fel.cvut.cz CTU in Prague March 8, 2017 Z. Hanzálek (CTU) Integer Linear Programming (ILP) March 8, 2017 1 / 43 Table of contents
Integer Linear Programming (ILP) Zdeněk Hanzálek, Přemysl Šůcha hanzalek@fel.cvut.cz CTU in Prague March 8, 2017 Z. Hanzálek (CTU) Integer Linear Programming (ILP) March 8, 2017 1 / 43 Table of contents
The Maximum Flow Problem with Disjunctive Constraints
 The Maximum Flow Problem with Disjunctive Constraints Ulrich Pferschy Joachim Schauer Abstract We study the maximum flow problem subject to binary disjunctive constraints in a directed graph: A negative
The Maximum Flow Problem with Disjunctive Constraints Ulrich Pferschy Joachim Schauer Abstract We study the maximum flow problem subject to binary disjunctive constraints in a directed graph: A negative
Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik. Combinatorial Optimization (MA 4502)
") Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik Combinatorial Optimization (MA 4502) Dr. Michael Ritter Problem Sheet 1 Homework Problems Exercise
Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik Combinatorial Optimization (MA 4502) Dr. Michael Ritter Problem Sheet 1 Homework Problems Exercise
4. Duality Duality 4.1 Duality of LPs and the duality theorem. min c T x x R n, c R n. s.t. ai Tx = b i i M a i R n
 2 4. Duality of LPs and the duality theorem... 22 4.2 Complementary slackness... 23 4.3 The shortest path problem and its dual... 24 4.4 Farkas' Lemma... 25 4.5 Dual information in the tableau... 26 4.6
2 4. Duality of LPs and the duality theorem... 22 4.2 Complementary slackness... 23 4.3 The shortest path problem and its dual... 24 4.4 Farkas' Lemma... 25 4.5 Dual information in the tableau... 26 4.6
Resource Constrained Project Scheduling Linear and Integer Programming (1)
") DM204, 2010 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Resource Constrained Project Linear and Integer Programming (1) Marco Chiarandini Department of Mathematics & Computer Science University of Southern
DM204, 2010 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Resource Constrained Project Linear and Integer Programming (1) Marco Chiarandini Department of Mathematics & Computer Science University of Southern
Matroids and Integrality Gaps for Hypergraphic Steiner Tree Relaxations
 Matroids and Integrality Gaps for Hypergraphic Steiner Tree Relaxations Rico Zenklusen Johns Hopkins University Joint work with: Michel Goemans, Neil Olver, Thomas Rothvoß 2 / 16 The Steiner Tree problem
Matroids and Integrality Gaps for Hypergraphic Steiner Tree Relaxations Rico Zenklusen Johns Hopkins University Joint work with: Michel Goemans, Neil Olver, Thomas Rothvoß 2 / 16 The Steiner Tree problem
Exact and Heuristic Algorithms for the Symmetric and Asymmetric Vehicle Routing Problem with Backhauls
 Exact and Heuristic Algorithms for the Symmetric and Asymmetric Vehicle Routing Problem with Backhauls Paolo Toth, Daniele Vigo ECCO IX - Dublin 1996 Exact and Heuristic Algorithms for VRPB 1 Vehicle Routing
Exact and Heuristic Algorithms for the Symmetric and Asymmetric Vehicle Routing Problem with Backhauls Paolo Toth, Daniele Vigo ECCO IX - Dublin 1996 Exact and Heuristic Algorithms for VRPB 1 Vehicle Routing
Introduction to Bin Packing Problems
 Introduction to Bin Packing Problems Fabio Furini March 13, 2015 Outline Origins and applications Applications: Definition: Bin Packing Problem (BPP) Solution techniques for the BPP Heuristic Algorithms
Introduction to Bin Packing Problems Fabio Furini March 13, 2015 Outline Origins and applications Applications: Definition: Bin Packing Problem (BPP) Solution techniques for the BPP Heuristic Algorithms
CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source
CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source
Efficient Primal- Dual Graph Algorithms for Map Reduce
 Efficient Primal- Dual Graph Algorithms for Map Reduce Joint work with Bahman Bahmani Ashish Goel, Stanford Kamesh Munagala Duke University Modern Data Models Over the past decade, many commodity distributed
Efficient Primal- Dual Graph Algorithms for Map Reduce Joint work with Bahman Bahmani Ashish Goel, Stanford Kamesh Munagala Duke University Modern Data Models Over the past decade, many commodity distributed
New algorithms for Disjoint Paths and Routing Problems
 New algorithms for Disjoint Paths and Routing Problems Chandra Chekuri Dept. of Computer Science Univ. of Illinois (UIUC) Menger s Theorem Theorem: The maximum number of s-t edgedisjoint paths in a graph
New algorithms for Disjoint Paths and Routing Problems Chandra Chekuri Dept. of Computer Science Univ. of Illinois (UIUC) Menger s Theorem Theorem: The maximum number of s-t edgedisjoint paths in a graph
CS6999 Probabilistic Methods in Integer Programming Randomized Rounding Andrew D. Smith April 2003
 CS6999 Probabilistic Methods in Integer Programming Randomized Rounding April 2003 Overview 2 Background Randomized Rounding Handling Feasibility Derandomization Advanced Techniques Integer Programming
CS6999 Probabilistic Methods in Integer Programming Randomized Rounding April 2003 Overview 2 Background Randomized Rounding Handling Feasibility Derandomization Advanced Techniques Integer Programming
Unit 1A: Computational Complexity
 Unit 1A: Computational Complexity Course contents: Computational complexity NP-completeness Algorithmic Paradigms Readings Chapters 3, 4, and 5 Unit 1A 1 O: Upper Bounding Function Def: f(n)= O(g(n)) if
Unit 1A: Computational Complexity Course contents: Computational complexity NP-completeness Algorithmic Paradigms Readings Chapters 3, 4, and 5 Unit 1A 1 O: Upper Bounding Function Def: f(n)= O(g(n)) if
Multi-criteria approximation schemes for the resource constrained shortest path problem
 Noname manuscript No. (will be inserted by the editor) Multi-criteria approximation schemes for the resource constrained shortest path problem Markó Horváth Tamás Kis Received: date / Accepted: date Abstract
Noname manuscript No. (will be inserted by the editor) Multi-criteria approximation schemes for the resource constrained shortest path problem Markó Horváth Tamás Kis Received: date / Accepted: date Abstract
Combinatorial optimization problems
 Combinatorial optimization problems Heuristic Algorithms Giovanni Righini University of Milan Department of Computer Science (Crema) Optimization In general an optimization problem can be formulated as:
Combinatorial optimization problems Heuristic Algorithms Giovanni Righini University of Milan Department of Computer Science (Crema) Optimization In general an optimization problem can be formulated as:
Week Cuts, Branch & Bound, and Lagrangean Relaxation
 Week 11 1 Integer Linear Programming This week we will discuss solution methods for solving integer linear programming problems. I will skip the part on complexity theory, Section 11.8, although this is
Week 11 1 Integer Linear Programming This week we will discuss solution methods for solving integer linear programming problems. I will skip the part on complexity theory, Section 11.8, although this is
Lecture 15 (Oct 6): LP Duality
: LP Duality") CMPUT 675: Approximation Algorithms Fall 2014 Lecturer: Zachary Friggstad Lecture 15 (Oct 6): LP Duality Scribe: Zachary Friggstad 15.1 Introduction by Example Given a linear program and a feasible solution
CMPUT 675: Approximation Algorithms Fall 2014 Lecturer: Zachary Friggstad Lecture 15 (Oct 6): LP Duality Scribe: Zachary Friggstad 15.1 Introduction by Example Given a linear program and a feasible solution
arxiv: v1 [cs.ds] 26 Feb 2016
![arxiv: v1 [cs.ds] 26 Feb 2016](/thumbs/71/65629444.jpg "arxiv: v1 [cs.ds] 26 Feb 2016") On the computational complexity of minimum-concave-cost flow in a two-dimensional grid Shabbir Ahmed, Qie He, Shi Li, George L. Nemhauser arxiv:1602.08515v1 [cs.ds] 26 Feb 2016 Abstract We study the minimum-concave-cost
On the computational complexity of minimum-concave-cost flow in a two-dimensional grid Shabbir Ahmed, Qie He, Shi Li, George L. Nemhauser arxiv:1602.08515v1 [cs.ds] 26 Feb 2016 Abstract We study the minimum-concave-cost
Scheduling Parallel Jobs with Linear Speedup
 Scheduling Parallel Jobs with Linear Speedup Alexander Grigoriev and Marc Uetz Maastricht University, Quantitative Economics, P.O.Box 616, 6200 MD Maastricht, The Netherlands. Email: {a.grigoriev, m.uetz}@ke.unimaas.nl
Scheduling Parallel Jobs with Linear Speedup Alexander Grigoriev and Marc Uetz Maastricht University, Quantitative Economics, P.O.Box 616, 6200 MD Maastricht, The Netherlands. Email: {a.grigoriev, m.uetz}@ke.unimaas.nl
Topics in Theoretical Computer Science April 08, Lecture 8
 Topics in Theoretical Computer Science April 08, 204 Lecture 8 Lecturer: Ola Svensson Scribes: David Leydier and Samuel Grütter Introduction In this lecture we will introduce Linear Programming. It was
Topics in Theoretical Computer Science April 08, 204 Lecture 8 Lecturer: Ola Svensson Scribes: David Leydier and Samuel Grütter Introduction In this lecture we will introduce Linear Programming. It was
Improving Christofides Algorithm for the s-t Path TSP
 Cornell University May 21, 2012 Joint work with Bobby Kleinberg and David Shmoys Metric TSP Metric (circuit) TSP Given a weighted graph G = (V, E) (c : E R + ), find a minimum Hamiltonian circuit Triangle
Cornell University May 21, 2012 Joint work with Bobby Kleinberg and David Shmoys Metric TSP Metric (circuit) TSP Given a weighted graph G = (V, E) (c : E R + ), find a minimum Hamiltonian circuit Triangle
Approximation Algorithms
 Approximation Algorithms What do you do when a problem is NP-complete? or, when the polynomial time solution is impractically slow? assume input is random, do expected performance. Eg, Hamiltonian path
Approximation Algorithms What do you do when a problem is NP-complete? or, when the polynomial time solution is impractically slow? assume input is random, do expected performance. Eg, Hamiltonian path
7. Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
Lectures 6, 7 and part of 8
 Lectures 6, 7 and part of 8 Uriel Feige April 26, May 3, May 10, 2015 1 Linear programming duality 1.1 The diet problem revisited Recall the diet problem from Lecture 1. There are n foods, m nutrients,
Lectures 6, 7 and part of 8 Uriel Feige April 26, May 3, May 10, 2015 1 Linear programming duality 1.1 The diet problem revisited Recall the diet problem from Lecture 1. There are n foods, m nutrients,
Solutions to Exercises
 1/13 Solutions to Exercises The exercises referred to as WS 1.1(a), and so forth, are from the course book: Williamson and Shmoys, The Design of Approximation Algorithms, Cambridge University Press, 2011,
1/13 Solutions to Exercises The exercises referred to as WS 1.1(a), and so forth, are from the course book: Williamson and Shmoys, The Design of Approximation Algorithms, Cambridge University Press, 2011,
Data Structures in Java
 Data Structures in Java Lecture 21: Introduction to NP-Completeness 12/9/2015 Daniel Bauer Algorithms and Problem Solving Purpose of algorithms: find solutions to problems. Data Structures provide ways
Data Structures in Java Lecture 21: Introduction to NP-Completeness 12/9/2015 Daniel Bauer Algorithms and Problem Solving Purpose of algorithms: find solutions to problems. Data Structures provide ways
Some Open Problems in Approximation Algorithms
 Some Open Problems in Approximation Algorithms David P. Williamson School of Operations Research and Information Engineering Cornell University February 28, 2011 University of Bonn Bonn, Germany David
Some Open Problems in Approximation Algorithms David P. Williamson School of Operations Research and Information Engineering Cornell University February 28, 2011 University of Bonn Bonn, Germany David
Hardness of Directed Routing with Congestion
 Hardness of Directed Routing with Congestion Julia Chuzhoy Sanjeev Khanna August 28, 2006 Abstract Given a graph G and a collection of source-sink pairs in G, what is the least integer c such that each
Hardness of Directed Routing with Congestion Julia Chuzhoy Sanjeev Khanna August 28, 2006 Abstract Given a graph G and a collection of source-sink pairs in G, what is the least integer c such that each
Linear Programming. Scheduling problems
 Linear Programming Scheduling problems Linear programming (LP) ( )., 1, for 0 min 1 1 1 1 1 11 1 1 n i x b x a x a b x a x a x c x c x z i m n mn m n n n n! = + + + + + + = Extreme points x ={x 1,,x n
Linear Programming Scheduling problems Linear programming (LP) ( )., 1, for 0 min 1 1 1 1 1 11 1 1 n i x b x a x a b x a x a x c x c x z i m n mn m n n n n! = + + + + + + = Extreme points x ={x 1,,x n
Routing. Topics: 6.976/ESD.937 1
 Routing Topics: Definition Architecture for routing data plane algorithm Current routing algorithm control plane algorithm Optimal routing algorithm known algorithms and implementation issues new solution
Routing Topics: Definition Architecture for routing data plane algorithm Current routing algorithm control plane algorithm Optimal routing algorithm known algorithms and implementation issues new solution
3.4 Relaxations and bounds
 3.4 Relaxations and bounds Consider a generic Discrete Optimization problem z = min{c(x) : x X} with an optimal solution x X. In general, the algorithms generate not only a decreasing sequence of upper
3.4 Relaxations and bounds Consider a generic Discrete Optimization problem z = min{c(x) : x X} with an optimal solution x X. In general, the algorithms generate not only a decreasing sequence of upper
Outline. Outline. Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING. 1. Scheduling CPM/PERT Resource Constrained Project Scheduling Model
 Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 and Mixed Integer Programg Marco Chiarandini 1. Resource Constrained Project Model 2. Mathematical Programg 2 Outline Outline 1. Resource Constrained
Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 and Mixed Integer Programg Marco Chiarandini 1. Resource Constrained Project Model 2. Mathematical Programg 2 Outline Outline 1. Resource Constrained
Machine scheduling with resource dependent processing times
 Mathematical Programming manuscript No. (will be inserted by the editor) Alexander Grigoriev Maxim Sviridenko Marc Uetz Machine scheduling with resource dependent processing times Received: date / Revised
Mathematical Programming manuscript No. (will be inserted by the editor) Alexander Grigoriev Maxim Sviridenko Marc Uetz Machine scheduling with resource dependent processing times Received: date / Revised
An Exact Algorithm for the Steiner Tree Problem with Delays
 Electronic Notes in Discrete Mathematics 36 (2010) 223 230 www.elsevier.com/locate/endm An Exact Algorithm for the Steiner Tree Problem with Delays Valeria Leggieri 1 Dipartimento di Matematica, Università
Electronic Notes in Discrete Mathematics 36 (2010) 223 230 www.elsevier.com/locate/endm An Exact Algorithm for the Steiner Tree Problem with Delays Valeria Leggieri 1 Dipartimento di Matematica, Università
Topic: Balanced Cut, Sparsest Cut, and Metric Embeddings Date: 3/21/2007
 CS880: Approximations Algorithms Scribe: Tom Watson Lecturer: Shuchi Chawla Topic: Balanced Cut, Sparsest Cut, and Metric Embeddings Date: 3/21/2007 In the last lecture, we described an O(log k log D)-approximation
CS880: Approximations Algorithms Scribe: Tom Watson Lecturer: Shuchi Chawla Topic: Balanced Cut, Sparsest Cut, and Metric Embeddings Date: 3/21/2007 In the last lecture, we described an O(log k log D)-approximation
Introduction to Integer Linear Programming
 Lecture 7/12/2006 p. 1/30 Introduction to Integer Linear Programming Leo Liberti, Ruslan Sadykov LIX, École Polytechnique liberti@lix.polytechnique.fr sadykov@lix.polytechnique.fr Lecture 7/12/2006 p.
Lecture 7/12/2006 p. 1/30 Introduction to Integer Linear Programming Leo Liberti, Ruslan Sadykov LIX, École Polytechnique liberti@lix.polytechnique.fr sadykov@lix.polytechnique.fr Lecture 7/12/2006 p.
The Steiner Network Problem
 The Steiner Network Problem Pekka Orponen T-79.7001 Postgraduate Course on Theoretical Computer Science 7.4.2008 Outline 1. The Steiner Network Problem Linear programming formulation LP relaxation 2. The
The Steiner Network Problem Pekka Orponen T-79.7001 Postgraduate Course on Theoretical Computer Science 7.4.2008 Outline 1. The Steiner Network Problem Linear programming formulation LP relaxation 2. The
A Multi-Exchange Local Search Algorithm for the Capacitated Facility Location Problem
 A Multi-Exchange Local Search Algorithm for the Capacitated Facility Location Problem Jiawei Zhang Bo Chen Yinyu Ye October 19, 2003 Abstract We present a multi-exchange local search algorithm for approximating
A Multi-Exchange Local Search Algorithm for the Capacitated Facility Location Problem Jiawei Zhang Bo Chen Yinyu Ye October 19, 2003 Abstract We present a multi-exchange local search algorithm for approximating
On Fixed Cost k-flow Problems
 On Fixed Cost k-flow Problems MohammadTaghi Hajiaghayi 1, Rohit Khandekar 2, Guy Kortsarz 3, and Zeev Nutov 4 1 University of Maryland, College Park, MD. hajiagha@cs.umd.edu. 2 Knight Capital Group, Jersey
On Fixed Cost k-flow Problems MohammadTaghi Hajiaghayi 1, Rohit Khandekar 2, Guy Kortsarz 3, and Zeev Nutov 4 1 University of Maryland, College Park, MD. hajiagha@cs.umd.edu. 2 Knight Capital Group, Jersey
Chapter 11. Approximation Algorithms. Slides by Kevin Wayne Pearson-Addison Wesley. All rights reserved.
 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 P and NP P: The family of problems that can be solved quickly in polynomial time.
Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 P and NP P: The family of problems that can be solved quickly in polynomial time.
The Complexity of Maximum. Matroid-Greedoid Intersection and. Weighted Greedoid Maximization
 Department of Computer Science Series of Publications C Report C-2004-2 The Complexity of Maximum Matroid-Greedoid Intersection and Weighted Greedoid Maximization Taneli Mielikäinen Esko Ukkonen University
Department of Computer Science Series of Publications C Report C-2004-2 The Complexity of Maximum Matroid-Greedoid Intersection and Weighted Greedoid Maximization Taneli Mielikäinen Esko Ukkonen University
Multicriteria approximation through decomposition
 Multicriteria approximation through decomposition Carl Burch Sven Krumke y Madhav Marathe z Cynthia Phillips x Eric Sundberg { Abstract We propose a general technique called solution decomposition to devise
Multicriteria approximation through decomposition Carl Burch Sven Krumke y Madhav Marathe z Cynthia Phillips x Eric Sundberg { Abstract We propose a general technique called solution decomposition to devise
Chapter 11. Approximation Algorithms. Slides by Kevin Wayne Pearson-Addison Wesley. All rights reserved.
 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
From Primal-Dual to Cost Shares and Back: A Stronger LP Relaxation for the Steiner Forest Problem
 From Primal-Dual to Cost Shares and Back: A Stronger LP Relaxation for the Steiner Forest Problem Jochen Könemann 1, Stefano Leonardi 2, Guido Schäfer 2, and Stefan van Zwam 3 1 Department of Combinatorics
From Primal-Dual to Cost Shares and Back: A Stronger LP Relaxation for the Steiner Forest Problem Jochen Könemann 1, Stefano Leonardi 2, Guido Schäfer 2, and Stefan van Zwam 3 1 Department of Combinatorics
Local Search Based Approximation Algorithms. Vinayaka Pandit. IBM India Research Laboratory
 Local Search Based Approximation Algorithms The k-median problem Vinayaka Pandit IBM India Research Laboratory joint work with Naveen Garg, Rohit Khandekar, and Vijay Arya The 2011 School on Approximability,
Local Search Based Approximation Algorithms The k-median problem Vinayaka Pandit IBM India Research Laboratory joint work with Naveen Garg, Rohit Khandekar, and Vijay Arya The 2011 School on Approximability,
3.10 Lagrangian relaxation
 3.10 Lagrangian relaxation Consider a generic ILP problem min {c t x : Ax b, Dx d, x Z n } with integer coefficients. Suppose Dx d are the complicating constraints. Often the linear relaxation and the
3.10 Lagrangian relaxation Consider a generic ILP problem min {c t x : Ax b, Dx d, x Z n } with integer coefficients. Suppose Dx d are the complicating constraints. Often the linear relaxation and the
Reconnect 04 Introduction to Integer Programming
 Sandia is a multiprogram laboratory operated by Sandia Corporation, a Lockheed Martin Company, Reconnect 04 Introduction to Integer Programming Cynthia Phillips, Sandia National Laboratories Integer programming
Sandia is a multiprogram laboratory operated by Sandia Corporation, a Lockheed Martin Company, Reconnect 04 Introduction to Integer Programming Cynthia Phillips, Sandia National Laboratories Integer programming
Lecture 11 October 7, 2013
 CS 4: Advanced Algorithms Fall 03 Prof. Jelani Nelson Lecture October 7, 03 Scribe: David Ding Overview In the last lecture we talked about set cover: Sets S,..., S m {,..., n}. S has cost c S. Goal: Cover
CS 4: Advanced Algorithms Fall 03 Prof. Jelani Nelson Lecture October 7, 03 Scribe: David Ding Overview In the last lecture we talked about set cover: Sets S,..., S m {,..., n}. S has cost c S. Goal: Cover
Approximation Algorithms and Hardness of Integral Concurrent Flow
 Approximation Algorithms and Hardness of Integral Concurrent Flow Parinya Chalermsook Julia Chuzhoy Alina Ene Shi Li May 16, 2012 Abstract We study an integral counterpart of the classical Maximum Concurrent
Approximation Algorithms and Hardness of Integral Concurrent Flow Parinya Chalermsook Julia Chuzhoy Alina Ene Shi Li May 16, 2012 Abstract We study an integral counterpart of the classical Maximum Concurrent
Fast and Simple Approximation Schemes for Generalized Flow
 Fast and Simple Approximation Schemes for Generalized Flow Lisa K. Fleischer Kevin D. Wayne July 19, 2001 Abstract We present fast and simple fully polynomial-time approximation schemes (FPTAS) for generalized
Fast and Simple Approximation Schemes for Generalized Flow Lisa K. Fleischer Kevin D. Wayne July 19, 2001 Abstract We present fast and simple fully polynomial-time approximation schemes (FPTAS) for generalized
2001 Dennis L. Bricker Dept. of Industrial Engineering The University of Iowa. Reducing dimensionality of DP page 1
 2001 Dennis L. Bricker Dept. of Industrial Engineering The University of Iowa Reducing dimensionality of DP page 1 Consider a knapsack with a weight capacity of 15 and a volume capacity of 12. Item # Value
2001 Dennis L. Bricker Dept. of Industrial Engineering The University of Iowa Reducing dimensionality of DP page 1 Consider a knapsack with a weight capacity of 15 and a volume capacity of 12. Item # Value
Mathematics for Decision Making: An Introduction. Lecture 13
 Mathematics for Decision Making: An Introduction Lecture 13 Matthias Köppe UC Davis, Mathematics February 17, 2009 13 1 Reminder: Flows in networks General structure: Flows in networks In general, consider
Mathematics for Decision Making: An Introduction Lecture 13 Matthias Köppe UC Davis, Mathematics February 17, 2009 13 1 Reminder: Flows in networks General structure: Flows in networks In general, consider
Some Open Problems in Approximation Algorithms
 Some Open Problems in Approximation Algorithms David P. Williamson School of Operations Research and Information Engineering Cornell University August 18, 2011 APPROX 2011 David P. Williamson (Cornell
Some Open Problems in Approximation Algorithms David P. Williamson School of Operations Research and Information Engineering Cornell University August 18, 2011 APPROX 2011 David P. Williamson (Cornell
On Column-restricted and Priority Covering Integer Programs
 On Column-restricted and Priority Covering Integer Programs Deeparnab Chakrabarty Elyot Grant Jochen Könemann November 24, 2009 Abstract In a 0,1-covering integer program (CIP), the goal is to pick a minimum
On Column-restricted and Priority Covering Integer Programs Deeparnab Chakrabarty Elyot Grant Jochen Könemann November 24, 2009 Abstract In a 0,1-covering integer program (CIP), the goal is to pick a minimum
Branch-and-cut (and-price) for the chance constrained vehicle routing problem
 for the chance constrained vehicle routing problem") Branch-and-cut (and-price) for the chance constrained vehicle routing problem Ricardo Fukasawa Department of Combinatorics & Optimization University of Waterloo May 25th, 2016 ColGen 2016 joint work with
Branch-and-cut (and-price) for the chance constrained vehicle routing problem Ricardo Fukasawa Department of Combinatorics & Optimization University of Waterloo May 25th, 2016 ColGen 2016 joint work with
Colored Bin Packing: Online Algorithms and Lower Bounds
 Noname manuscript No. (will be inserted by the editor) Colored Bin Packing: Online Algorithms and Lower Bounds Martin Böhm György Dósa Leah Epstein Jiří Sgall Pavel Veselý Received: date / Accepted: date
Noname manuscript No. (will be inserted by the editor) Colored Bin Packing: Online Algorithms and Lower Bounds Martin Böhm György Dósa Leah Epstein Jiří Sgall Pavel Veselý Received: date / Accepted: date
Integer Programming ISE 418. Lecture 8. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 8 Dr. Ted Ralphs ISE 418 Lecture 8 1 Reading for This Lecture Wolsey Chapter 2 Nemhauser and Wolsey Sections II.3.1, II.3.6, II.4.1, II.4.2, II.5.4 Duality for Mixed-Integer
Integer Programming ISE 418 Lecture 8 Dr. Ted Ralphs ISE 418 Lecture 8 1 Reading for This Lecture Wolsey Chapter 2 Nemhauser and Wolsey Sections II.3.1, II.3.6, II.4.1, II.4.2, II.5.4 Duality for Mixed-Integer
CS 583: Approximation Algorithms: Introduction
 CS 583: Approximation Algorithms: Introduction Chandra Chekuri January 15, 2018 1 Introduction Course Objectives 1. To appreciate that not all intractable problems are the same. NP optimization problems,
CS 583: Approximation Algorithms: Introduction Chandra Chekuri January 15, 2018 1 Introduction Course Objectives 1. To appreciate that not all intractable problems are the same. NP optimization problems,
Santa Claus Schedules Jobs on Unrelated Machines
 Santa Claus Schedules Jobs on Unrelated Machines Ola Svensson (osven@kth.se) Royal Institute of Technology - KTH Stockholm, Sweden March 22, 2011 arxiv:1011.1168v2 [cs.ds] 21 Mar 2011 Abstract One of the
Santa Claus Schedules Jobs on Unrelated Machines Ola Svensson (osven@kth.se) Royal Institute of Technology - KTH Stockholm, Sweden March 22, 2011 arxiv:1011.1168v2 [cs.ds] 21 Mar 2011 Abstract One of the
Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
On Two Class-Constrained Versions of the Multiple Knapsack Problem
 On Two Class-Constrained Versions of the Multiple Knapsack Problem Hadas Shachnai Tami Tamir Department of Computer Science The Technion, Haifa 32000, Israel Abstract We study two variants of the classic
On Two Class-Constrained Versions of the Multiple Knapsack Problem Hadas Shachnai Tami Tamir Department of Computer Science The Technion, Haifa 32000, Israel Abstract We study two variants of the classic
CS 6820 Fall 2014 Lectures, October 3-20, 2014
 Analysis of Algorithms Linear Programming Notes CS 6820 Fall 2014 Lectures, October 3-20, 2014 1 Linear programming The linear programming (LP) problem is the following optimization problem. We are given
Analysis of Algorithms Linear Programming Notes CS 6820 Fall 2014 Lectures, October 3-20, 2014 1 Linear programming The linear programming (LP) problem is the following optimization problem. We are given
Duality of LPs and Applications
 Lecture 6 Duality of LPs and Applications Last lecture we introduced duality of linear programs. We saw how to form duals, and proved both the weak and strong duality theorems. In this lecture we will
Lecture 6 Duality of LPs and Applications Last lecture we introduced duality of linear programs. We saw how to form duals, and proved both the weak and strong duality theorems. In this lecture we will
Topic: Primal-Dual Algorithms Date: We finished our discussion of randomized rounding and began talking about LP Duality.
 CS787: Advanced Algorithms Scribe: Amanda Burton, Leah Kluegel Lecturer: Shuchi Chawla Topic: Primal-Dual Algorithms Date: 10-17-07 14.1 Last Time We finished our discussion of randomized rounding and
CS787: Advanced Algorithms Scribe: Amanda Burton, Leah Kluegel Lecturer: Shuchi Chawla Topic: Primal-Dual Algorithms Date: 10-17-07 14.1 Last Time We finished our discussion of randomized rounding and
Interconnect Yield Model for Manufacturability Prediction in Synthesis of Standard Cell Based Designs *
 Interconnect Yield Model for Manufacturability Prediction in Synthesis of Standard Cell Based Designs * Hans T. Heineken and Wojciech Maly Department of Electrical and Computer Engineering Carnegie Mellon
Interconnect Yield Model for Manufacturability Prediction in Synthesis of Standard Cell Based Designs * Hans T. Heineken and Wojciech Maly Department of Electrical and Computer Engineering Carnegie Mellon
An approximation algorithm for the minimum latency set cover problem
 An approximation algorithm for the minimum latency set cover problem Refael Hassin 1 and Asaf Levin 2 1 Department of Statistics and Operations Research, Tel-Aviv University, Tel-Aviv, Israel. hassin@post.tau.ac.il
An approximation algorithm for the minimum latency set cover problem Refael Hassin 1 and Asaf Levin 2 1 Department of Statistics and Operations Research, Tel-Aviv University, Tel-Aviv, Israel. hassin@post.tau.ac.il
Bandwidth Allocation in Networks: A Single Dual Update Subroutine for Multiple Objectives
 Bandwidth Allocation in Networks: A Single Dual Update Subroutine for Multiple Objectives Sung-woo Cho University of Southern California Ashish Goel Stanford University May 31, 2005 Abstract We study the
Bandwidth Allocation in Networks: A Single Dual Update Subroutine for Multiple Objectives Sung-woo Cho University of Southern California Ashish Goel Stanford University May 31, 2005 Abstract We study the
1 Investing and combining expert advice
 Cornell University, Fall 2013 CS 6820: Algorithms Lecture notes: The multiplicative weights update method October 9 11, 2013 The multiplicative weights update method is a family of algorithms that have
Cornell University, Fall 2013 CS 6820: Algorithms Lecture notes: The multiplicative weights update method October 9 11, 2013 The multiplicative weights update method is a family of algorithms that have
Power-Driven Global Routing for Multi-Supply Voltage Domains
 Power-Driven Global Routing for Multi-Supply Voltage Domains Tai-Hsuan Wu, Azadeh Davoodi, and Jeffrey T. Linderoth Department of Electrical and Computer Engineering Department of Industrial and Systems
Power-Driven Global Routing for Multi-Supply Voltage Domains Tai-Hsuan Wu, Azadeh Davoodi, and Jeffrey T. Linderoth Department of Electrical and Computer Engineering Department of Industrial and Systems
Representations of All Solutions of Boolean Programming Problems
 Representations of All Solutions of Boolean Programming Problems Utz-Uwe Haus and Carla Michini Institute for Operations Research Department of Mathematics ETH Zurich Rämistr. 101, 8092 Zürich, Switzerland
Representations of All Solutions of Boolean Programming Problems Utz-Uwe Haus and Carla Michini Institute for Operations Research Department of Mathematics ETH Zurich Rämistr. 101, 8092 Zürich, Switzerland
12. LOCAL SEARCH. gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria
 12. LOCAL SEARCH gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria Lecture slides by Kevin Wayne Copyright 2005 Pearson-Addison Wesley h ttp://www.cs.princeton.edu/~wayne/kleinberg-tardos
12. LOCAL SEARCH gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria Lecture slides by Kevin Wayne Copyright 2005 Pearson-Addison Wesley h ttp://www.cs.princeton.edu/~wayne/kleinberg-tardos
Optimization of Submodular Functions Tutorial - lecture I
 Optimization of Submodular Functions Tutorial - lecture I Jan Vondrák 1 1 IBM Almaden Research Center San Jose, CA Jan Vondrák (IBM Almaden) Submodular Optimization Tutorial 1 / 1 Lecture I: outline 1
Optimization of Submodular Functions Tutorial - lecture I Jan Vondrák 1 1 IBM Almaden Research Center San Jose, CA Jan Vondrák (IBM Almaden) Submodular Optimization Tutorial 1 / 1 Lecture I: outline 1
Locating Depots for Capacitated Vehicle Routing
 Locating Depots for Capacitated Vehicle Routing Inge Li Gørtz Viswanath Nagarajan Abstract We study a location-routing problem in the context of capacitated vehicle routing. The input to the k-location
Locating Depots for Capacitated Vehicle Routing Inge Li Gørtz Viswanath Nagarajan Abstract We study a location-routing problem in the context of capacitated vehicle routing. The input to the k-location
Algorithm Design Strategies V
 Algorithm Design Strategies V Joaquim Madeira Version 0.0 October 2016 U. Aveiro, October 2016 1 Overview The 0-1 Knapsack Problem Revisited The Fractional Knapsack Problem Greedy Algorithms Example Coin
Algorithm Design Strategies V Joaquim Madeira Version 0.0 October 2016 U. Aveiro, October 2016 1 Overview The 0-1 Knapsack Problem Revisited The Fractional Knapsack Problem Greedy Algorithms Example Coin
The traveling salesman problem
 Chapter 58 The traveling salesman problem The traveling salesman problem (TSP) asks for a shortest Hamiltonian circuit in a graph. It belongs to the most seductive problems in combinatorial optimization,
Chapter 58 The traveling salesman problem The traveling salesman problem (TSP) asks for a shortest Hamiltonian circuit in a graph. It belongs to the most seductive problems in combinatorial optimization,
Introduction to Integer Programming
 Lecture 3/3/2006 p. /27 Introduction to Integer Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Lecture 3/3/2006 p. 2/27 Contents IP formulations and examples Total unimodularity
Lecture 3/3/2006 p. /27 Introduction to Integer Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Lecture 3/3/2006 p. 2/27 Contents IP formulations and examples Total unimodularity
Lecture 20: LP Relaxation and Approximation Algorithms. 1 Introduction. 2 Vertex Cover problem. CSCI-B609: A Theorist s Toolkit, Fall 2016 Nov 8
 CSCI-B609: A Theorist s Toolkit, Fall 2016 Nov 8 Lecture 20: LP Relaxation and Approximation Algorithms Lecturer: Yuan Zhou Scribe: Syed Mahbub Hafiz 1 Introduction When variables of constraints of an
CSCI-B609: A Theorist s Toolkit, Fall 2016 Nov 8 Lecture 20: LP Relaxation and Approximation Algorithms Lecturer: Yuan Zhou Scribe: Syed Mahbub Hafiz 1 Introduction When variables of constraints of an
Preface to the Fifth Edition
 Preface to the Fifth Edition When preparing the first edition of this book, more than ten years ago, we tried to accomplish two objectives: it should be useful as an advanced graduate textbook, but also
Preface to the Fifth Edition When preparing the first edition of this book, more than ten years ago, we tried to accomplish two objectives: it should be useful as an advanced graduate textbook, but also
Weighted Acyclic Di-Graph Partitioning by Balanced Disjoint Paths
 Weighted Acyclic Di-Graph Partitioning by Balanced Disjoint Paths H. Murat AFSAR Olivier BRIANT Murat.Afsar@g-scop.inpg.fr Olivier.Briant@g-scop.inpg.fr G-SCOP Laboratory Grenoble Institute of Technology
Weighted Acyclic Di-Graph Partitioning by Balanced Disjoint Paths H. Murat AFSAR Olivier BRIANT Murat.Afsar@g-scop.inpg.fr Olivier.Briant@g-scop.inpg.fr G-SCOP Laboratory Grenoble Institute of Technology
Branching Rules for Minimum Congestion Multi- Commodity Flow Problems
 Clemson University TigerPrints All Theses Theses 8-2012 Branching Rules for Minimum Congestion Multi- Commodity Flow Problems Cameron Megaw Clemson University, cmegaw@clemson.edu Follow this and additional
Clemson University TigerPrints All Theses Theses 8-2012 Branching Rules for Minimum Congestion Multi- Commodity Flow Problems Cameron Megaw Clemson University, cmegaw@clemson.edu Follow this and additional
Transactions on Algorithms. Two-stage Robust Network Design with Exponential Scenarios
 Transactions on Algorithms Two-stage Robust Networ Design with Exponential Scenarios Journal: Transactions on Algorithms Manuscript ID: draft Manuscript Type: Original Article Date Submitted by the Author:
Transactions on Algorithms Two-stage Robust Networ Design with Exponential Scenarios Journal: Transactions on Algorithms Manuscript ID: draft Manuscript Type: Original Article Date Submitted by the Author:
4/12/2011. Chapter 8. NP and Computational Intractability. Directed Hamiltonian Cycle. Traveling Salesman Problem. Directed Hamiltonian Cycle
 Directed Hamiltonian Cycle Chapter 8 NP and Computational Intractability Claim. G has a Hamiltonian cycle iff G' does. Pf. Suppose G has a directed Hamiltonian cycle Γ. Then G' has an undirected Hamiltonian
Directed Hamiltonian Cycle Chapter 8 NP and Computational Intractability Claim. G has a Hamiltonian cycle iff G' does. Pf. Suppose G has a directed Hamiltonian cycle Γ. Then G' has an undirected Hamiltonian
Improved Bounds for Flow Shop Scheduling
 Improved Bounds for Flow Shop Scheduling Monaldo Mastrolilli and Ola Svensson IDSIA - Switzerland. {monaldo,ola}@idsia.ch Abstract. We resolve an open question raised by Feige & Scheideler by showing that
Improved Bounds for Flow Shop Scheduling Monaldo Mastrolilli and Ola Svensson IDSIA - Switzerland. {monaldo,ola}@idsia.ch Abstract. We resolve an open question raised by Feige & Scheideler by showing that
Connectedness of Efficient Solutions in Multiple. Objective Combinatorial Optimization
 Connectedness of Efficient Solutions in Multiple Objective Combinatorial Optimization Jochen Gorski Kathrin Klamroth Stefan Ruzika Communicated by H. Benson Abstract Connectedness of efficient solutions
Connectedness of Efficient Solutions in Multiple Objective Combinatorial Optimization Jochen Gorski Kathrin Klamroth Stefan Ruzika Communicated by H. Benson Abstract Connectedness of efficient solutions
Machine Minimization for Scheduling Jobs with Interval Constraints
 Machine Minimization for Scheduling Jobs with Interval Constraints Julia Chuzhoy Sudipto Guha Sanjeev Khanna Joseph (Seffi) Naor Abstract The problem of scheduling jobs with interval constraints is a well-studied
Machine Minimization for Scheduling Jobs with Interval Constraints Julia Chuzhoy Sudipto Guha Sanjeev Khanna Joseph (Seffi) Naor Abstract The problem of scheduling jobs with interval constraints is a well-studied
Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths
 Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
ACO Comprehensive Exam March 20 and 21, Computability, Complexity and Algorithms
 1. Computability, Complexity and Algorithms Part a: You are given a graph G = (V,E) with edge weights w(e) > 0 for e E. You are also given a minimum cost spanning tree (MST) T. For one particular edge
1. Computability, Complexity and Algorithms Part a: You are given a graph G = (V,E) with edge weights w(e) > 0 for e E. You are also given a minimum cost spanning tree (MST) T. For one particular edge
NP-COMPLETE PROBLEMS. 1. Characterizing NP. Proof
 T-79.5103 / Autumn 2006 NP-complete problems 1 NP-COMPLETE PROBLEMS Characterizing NP Variants of satisfiability Graph-theoretic problems Coloring problems Sets and numbers Pseudopolynomial algorithms
T-79.5103 / Autumn 2006 NP-complete problems 1 NP-COMPLETE PROBLEMS Characterizing NP Variants of satisfiability Graph-theoretic problems Coloring problems Sets and numbers Pseudopolynomial algorithms
Preliminaries. Graphs. E : set of edges (arcs) (Undirected) Graph : (i, j) = (j, i) (edges) V = {1, 2, 3, 4, 5}, E = {(1, 3), (3, 2), (2, 4)}
 (Undirected) Graph : (i, j) = (j, i) (edges) V = {1, 2, 3, 4, 5}, E = {(1, 3), (3, 2), (2, 4)}") Preliminaries Graphs G = (V, E), V : set of vertices E : set of edges (arcs) (Undirected) Graph : (i, j) = (j, i) (edges) 1 2 3 5 4 V = {1, 2, 3, 4, 5}, E = {(1, 3), (3, 2), (2, 4)} 1 Directed Graph (Digraph)
Preliminaries Graphs G = (V, E), V : set of vertices E : set of edges (arcs) (Undirected) Graph : (i, j) = (j, i) (edges) 1 2 3 5 4 V = {1, 2, 3, 4, 5}, E = {(1, 3), (3, 2), (2, 4)} 1 Directed Graph (Digraph)
Scheduling and Optimization Course (MPRI)
") MPRI Scheduling and optimization: lecture p. /6 Scheduling and Optimization Course (MPRI) Leo Liberti LIX, École Polytechnique, France MPRI Scheduling and optimization: lecture p. /6 Teachers Christoph
MPRI Scheduling and optimization: lecture p. /6 Scheduling and Optimization Course (MPRI) Leo Liberti LIX, École Polytechnique, France MPRI Scheduling and optimization: lecture p. /6 Teachers Christoph
3.10 Column generation method
 3.10 Column generation method Many relevant decision-making problems can be formulated as ILP problems with a very large (exponential) number of variables. Examples: cutting stock, crew scheduling, vehicle
3.10 Column generation method Many relevant decision-making problems can be formulated as ILP problems with a very large (exponential) number of variables. Examples: cutting stock, crew scheduling, vehicle
In the original knapsack problem, the value of the contents of the knapsack is maximized subject to a single capacity constraint, for example weight.
 In the original knapsack problem, the value of the contents of the knapsack is maximized subject to a single capacity constraint, for example weight. In the multi-dimensional knapsack problem, additional
In the original knapsack problem, the value of the contents of the knapsack is maximized subject to a single capacity constraint, for example weight. In the multi-dimensional knapsack problem, additional
Algorithms for multiplayer multicommodity ow problems
 Noname manuscript No. (will be inserted by the editor) Algorithms for multiplayer multicommodity ow problems Attila Bernáth Tamás Király Erika Renáta Kovács Gergely Mádi-Nagy Gyula Pap Júlia Pap Jácint
Noname manuscript No. (will be inserted by the editor) Algorithms for multiplayer multicommodity ow problems Attila Bernáth Tamás Király Erika Renáta Kovács Gergely Mádi-Nagy Gyula Pap Júlia Pap Jácint
Maximum-Life Routing Schedule
 Maximum-Life Routing Schedule Peng-Jun Wan wan@cs.iit.edu Peng-Jun Wan (wan@cs.iit.edu) Maximum-Life Routing Schedule 1 / 42 Outline Problem Description Min-Cost Routing Ellipsoid Algorithm Price-Directive
Maximum-Life Routing Schedule Peng-Jun Wan wan@cs.iit.edu Peng-Jun Wan (wan@cs.iit.edu) Maximum-Life Routing Schedule 1 / 42 Outline Problem Description Min-Cost Routing Ellipsoid Algorithm Price-Directive