Rigid Body Dynamics 2. CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
|
|
|
- Carmella Burke
- 5 years ago
- Views:
Transcription
1 Rigid Body Dynamics 2 CSE169: Compute Animation nstucto: Steve Rotenbeg UCSD, Winte 2018

2 Coss Poduct & Hat Opeato
3 Deivative of a Rotating Vecto Let s say that vecto is otating aound the oigin, maintaining a fied distance At any instant, it has an angula velocity of ω d dt ω ω ω
4 Poduct Rule The poduct ule of diffeential calculus can be etended to vecto and mati poducts as well dt d dt d dt d dt d dt d dt d dt d dt d dt d B A B A B A b a b a b a b a b a b a
5 Rigid Bodies We teat a igid body as a system of paticles, whee the distance between any two paticles is fied We will assume that intenal foces ae geneated to hold the elative positions fied. These intenal foces ae all balanced out with Newton s thid law, so that they all cancel out and have no effect on the total momentum o angula momentum The igid body can actually have an infinite numbe of paticles, spead out ove a finite volume nstead of mass being concentated at discete points, we will conside the density as being vaiable ove the volume
6 Rigid Body Mass With a system of paticles, we defined the total mass as: m n i1 m i Fo a igid body, we will define it as the integal of the density ρ ove some volumetic domain Ω m d
7 Angula Momentum The linea momentum of a paticle is p = mv We define the moment of momentum (o angula momentum) of a paticle at some offset as the vecto L = p Like linea momentum, angula momentum is conseved in a mechanical system f the paticle is constained only to otate so that the diection of is changing but the length is not, we can e-epess its velocity as a function of angula velocity ω: v = ω This allows us to e-epess L as a function of ω: L = p = mv = m v = m ω L = m ω L = m ω
8 Rotational netia L = m ω We can e-wite this as: L = ω whee = m We ve intoduced the otational inetia mati, which elates the angula momentum of a otating paticle to its angula velocity
9 Rotational netia of a Paticle ˆ ˆ y z y z z y z y z y z y y z y z y z y z m m m
10 Rotational netia of a Paticle ω L y z y z z y z y z y z y m m m m m m m m m
11 Rotational netia of a Rigid Body Fo a igid body, we eplace the single mass and position of the paticle with an integation ove all of the points of the igid body times the density at that point
12 Rigid Body Rotational netia zz yz z yz yy y z y y z y z z y z y z y z y d d d d d d d d d
13 Rotational netia The otational inetia mati is a 33 symmetic mati that is essentially the otational equivalent of mass t elates the angula momentum of a system to its angula velocity by the equation L ω This is simila to how mass elates linea momentum to linea velocity, but otation adds additional compleity p m v
14 Rotational netia The cente of mass of a igid body behaves like a paticle- it has position, velocity, momentum, etc., and it esponds to foces though f=ma Rigid bodies also add popeties of otation. These behave in a simila fashion to the tanslational popeties, but the main diffeence is in the velocity-momentum elationships: p = mv vs. L = ω We have a vecto p fo linea momentum and vecto L fo angula momentum We also have a vecto v fo linea velocity and vecto ω fo angula velocity n the linea case, the velocity and momentum ae elated by a single scala m, but in the angula case, they ae elated by a mati This means that linea velocity and linea momentum always line up, but angula velocity and angula momentum don t Also, as itself changes as the object otates, the elationship between ω and L changes This means that a constant angula momentum may esult in a non-constant angula velocity, thus esulting in the tumbling motion of igid bodies
15 Rotational netia L = ω Remembe eigenvalue equations of the fom A=b whee given a mati A, we want to know if thee ae any vectos that when tansfomed by A esult in a scaled vesion of the (i.e., ae thee vectos who s diection doesn t change afte being tansfomed?) A symmetic 33 mati (like ) has 3 eal eigenvalues and 3 othonomal eigenvectos f the angula momentum L lines up with one of the eigenvectos of, then ω will line up with L and the angula velocity will be constant Othewise, the angula velocity will be non-constant and we will get tumbling motion We call these eigenvectos the pincipal aes of the igid body and they ae constant elative to the geomety of the igid body Usually, we want to align these to the, y, and z aes when we initialize the igid body. That way, we can epesent the otational inetia as 3 constants (which happen to be the 3 eigenvalues of )
16 Pincipal Aes We see thee eample angula momentum vectos L and thei coesponding angula velocities ω, all based on the same otational inetial mati We can see that L 1 and L 3 must be aligned with the pincipal aes, as they esult in angula velocities in the same diection as the angula momentum L 1 L 2 ω 2 ω 1 L 3 ω 3
17 Pincipal Aes & netias f we diagonalize the mati, we get an oientation mati A and a constant diagonal mati o The mati A otates the object fom an oientation whee the pincipal aes line up with the, y, and z aes The thee values in o, (namely, y, and z ) ae the pincipal inetias. They epesent the esistance to toque aound the coesponding pincipal ais (in a simila way that mass epesents the esistance to foce)
18 Diagonalization of Rotational netial z y T zz yz z yz yy y z y whee A A


19 Paticle Dynamics Position Velocity Acceleation Mass Momentum Foce
 Angula Velocity (vecto) Angula")
 Momentum")
20 Rigid Body Dynamics Oientation (33 mati) Angula Velocity (vecto) Angula Acceleation (vecto) = A 0 A T Rotational netia (33 mati) Momentum (vecto) Toque (vecto)
21 Newton-Eule Equations f ma τ ω ω ω
22 Toque-Fee Motion We can solve the Newton-Eule equations fo the acceleation tems: a = 1 m f ഥω = 1 τ ω ω We see that acceleation a will be 0 if thee is no foce f Howeve, if thee is no toque τ, thee may still be some angula acceleation: ഥω = 1 ω ω We call this toque-fee motion and this is esponsible fo tumbling motion we see in igid bodies
23 Rigid Body Simulation Each fame, we can apply seveal foces to the igid body, that sum up to one total foce and one total toque f = f i τ = i f i We can then integate the foce and toque ove the time step to get the new linea and angula momenta p = p + f t L = L + τ t We can then compute the linea and angula velocities fom those: v = 1 m p ω = 1 L We can now integate the new position and oientation: = + v t A = A Rotate(ω t)
24 Rigid Body Simulation At some point, we need to compute 1 whee = A 0 A T Note the identity S T 1 = T 1 S 1 Likewise STU 1 = U 1 T 1 S 1 Also, as A is othonomal, A 1 = A T Theefoe 1 = A 0 A T 1 = A 0 1 A T As 0 is diagonal, 0 1 is easy to pe-compute
25 Rigid Body Set-Up To define a igid body fom a physics point of view, we need only 4 constants: its mass m, and its pincipal otational inetias, y, and z Fo collision detection and endeing, we will also want some type of geomety- and we can calculate the inetia popeties fom this We epect that the geomety fo the igid body is positioned such that the cente of mass lies at the oigin and that the pincipal aes line up with, y, and z One way to do this is to use simple shapes like sphees and boes. We can use simple fomulas to calculate m,, y, and z fom the dimensions and density (see last lectue fo some of these) Altenately, we can use a tiangle mesh as input and calculate the inetia popeties fom that
26 Mitich-Ebely Algoithm n 1996, Bian Mitich published an algoithm fo analytically calculating the inetia popeties of a polygonal mesh and in 2002, David Ebely steamlined the algoithm specifically fo tiangle meshes The esulting algoithm loops though each tiangle, makes seveal elatively simple calculations pe tiangle, and ultimately ends up with eact values fo the total volume, cente of mass, and all 6 otational inetia integals We could conceivably input any mesh, calculate the popeties, and then e-cente the mesh to move the cente of mass to the oigin, and then diagonalize the otational inetia mati and e-otate the mesh by the esulting otation to align the pincipal aes with, y, and z
27 Kinematics of Offset Points
28 Offset Position Let s say we have a point on a igid body f is the wold space offset of the point elative to the cente of mass of the igid body, then the position of the point in wold space is: cm
29 Offset Position cm = cm +
30 Offset Velocity The velocity of the offset point is just the deivative of its position cm v d dt d dt cm d dt v v cm ω
31 Offset Acceleation The offset acceleation is the deivative of the offset velocity v v cm ω a dv dt dv dt cm dω dt ω d dt a a cm ω ω ω
32 Kinematics of an Offset Point The kinematic equations fo a fied point on a igid body ae: cm v v cm ω a a cm ω ω ω
33 nvese Mass Mati
34 Offset Foces Suppose we have a paticle f we apply a foce to it, what is the esulting acceleation? Easy:
35 Offset Foces With igid bodies, the same holds tue fo the acceleation of the cente of mass Howeve, what if we e inteested in the acceleation of some offset point? f we apply a foce f to a igid body at offset 1, what is the esulting acceleation at a (possibly) diffeent offset 2?
36 Offset Foces f we apply a foce f to a igid body at offset 1, what is the esulting acceleation at a offset 2? a =? f 2 1

37 Offset Foces

38 Offset Foces

39 Offset Foces So, when we apply a foce f at 1, we get the esulting igid body acceleations: But we e inteested in the acceleation at offset 2, so we need to use:

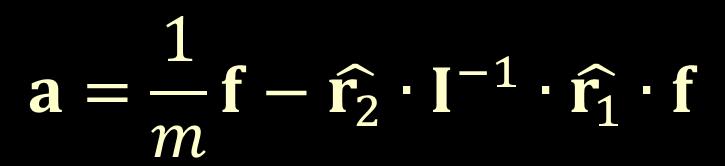
40 Offset Foces

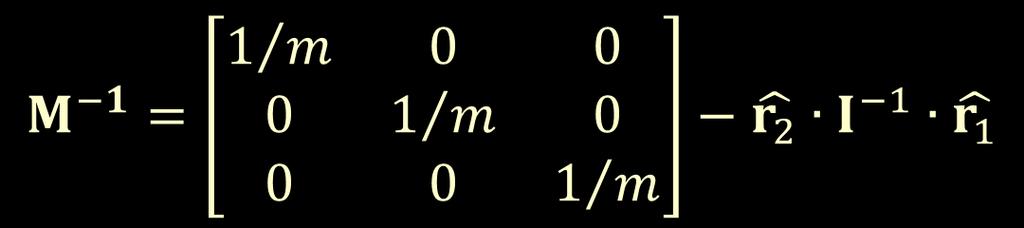
41 nvese Mass Mati
42 nvese Mass Mati We call M -1 an invese mass mati, (and we can call M the mass mati) t lets us apply a foce at 1 and find the esulting acceleation at 2 in a f=ma fomat t also lets us apply an impulse at 1 and find the esulting change in velocity Note: 1 can equal 2, allowing us to find the esulting acceleation at the same offset whee we apply the foce
43 nvese Mass Mati Why do we cae? Well, this lets us do all kinds of useful things such as collisions and constaints Fo a collision, fo eample, we can use it to solve what impulse will pevent the velocity of a colliding point to go though anothe object Fo a constaint, we can solve the constaint foce the holds an offset point still (zeo acceleation)
44 Collisions & Constaints
45 Collisions Lets say we have a igid body that hits the gound at offset point We will assume the collision has zeo elasticity and high enough fiction to zeo out any tangential velocity The velocity at the collision point is The collision will esult in an impulse that causes the offset velocity v to go to zeo immediately afte the collision Theefoe, we want to solve fo impulse j:
46 Collisions Thee s a lot moe to say about collisions Fo states, that eample was of one igid body colliding with an infinite mass and we ll need to have igid bodies colliding with othe igid bodies Also, we want to handle non-zeo elasticity, and a ealistic fiction model Then comes issues of multiple simultaneous collisions Then static contact situations Then olling and sliding Then stacking
47 Constaints t is common to add constaints to a igid body system that allows us to ceate aticulated figues with vaious joint types Fo eample, we could constain an offset position of one igid body to match a diffeent offset position on anothe igid body, thus ceating a ball-and-socket type joint The constaint would apply some foce to the fist igid body and an equal an opposite foce to the second. The constaint foce would be whateve foce is necessay to keep the two points fom sepaating We can use the invese mass mati technique to fomulate an equation that lets us solve fo the unknown constaint foce f multiple objects ae constained togethe in a lage goup, then we must simultaneously solve fo all of these constaint foces in one big system of equations
48 Constaints & Collisions t tuns out that constaints and collisions can be fomulated in vey simila ways although thee ae some impotant diffeences (namely, constaints fom equality equations and collisions fom inequality equations) They can all be included in one big system and then solved by a special inequality solve called an LCP solve (LCP stands fo linea complementaity poblem) o by othe techniques This lets us combine igid body motion, constaints, and collisions into one single pocess The details ae outside the scope of this class, but ve included a pdf on the web page that gives an oveview of the state of the at in igid body simulation
7.2. Coulomb s Law. The Electric Force
 Coulomb s aw Recall that chaged objects attact some objects and epel othes at a distance, without making any contact with those objects Electic foce,, o the foce acting between two chaged objects, is somewhat
Coulomb s aw Recall that chaged objects attact some objects and epel othes at a distance, without making any contact with those objects Electic foce,, o the foce acting between two chaged objects, is somewhat
Rotational Motion: Statics and Dynamics
 Physics 07 Lectue 17 Goals: Lectue 17 Chapte 1 Define cente of mass Analyze olling motion Intoduce and analyze toque Undestand the equilibium dynamics of an extended object in esponse to foces Employ consevation
Physics 07 Lectue 17 Goals: Lectue 17 Chapte 1 Define cente of mass Analyze olling motion Intoduce and analyze toque Undestand the equilibium dynamics of an extended object in esponse to foces Employ consevation
Stress, Cauchy s equation and the Navier-Stokes equations
 Chapte 3 Stess, Cauchy s equation and the Navie-Stokes equations 3. The concept of taction/stess Conside the volume of fluid shown in the left half of Fig. 3.. The volume of fluid is subjected to distibuted
Chapte 3 Stess, Cauchy s equation and the Navie-Stokes equations 3. The concept of taction/stess Conside the volume of fluid shown in the left half of Fig. 3.. The volume of fluid is subjected to distibuted
Chapter 4. Newton s Laws of Motion
 Chapte 4 Newton s Laws of Motion 4.1 Foces and Inteactions A foce is a push o a pull. It is that which causes an object to acceleate. The unit of foce in the metic system is the Newton. Foce is a vecto
Chapte 4 Newton s Laws of Motion 4.1 Foces and Inteactions A foce is a push o a pull. It is that which causes an object to acceleate. The unit of foce in the metic system is the Newton. Foce is a vecto
Section 26 The Laws of Rotational Motion
 Physics 24A Class Notes Section 26 The Laws of otational Motion What do objects do and why do they do it? They otate and we have established the quantities needed to descibe this motion. We now need to
Physics 24A Class Notes Section 26 The Laws of otational Motion What do objects do and why do they do it? They otate and we have established the quantities needed to descibe this motion. We now need to
Physics 207 Lecture 5. Lecture 5
 Lectue 5 Goals: Addess sstems with multiple acceleations in 2- dimensions (including linea, pojectile and cicula motion) Discen diffeent efeence fames and undestand how the elate to paticle motion in stationa
Lectue 5 Goals: Addess sstems with multiple acceleations in 2- dimensions (including linea, pojectile and cicula motion) Discen diffeent efeence fames and undestand how the elate to paticle motion in stationa
Physics 2A Chapter 10 - Moment of Inertia Fall 2018
 Physics Chapte 0 - oment of netia Fall 08 The moment of inetia of a otating object is a measue of its otational inetia in the same way that the mass of an object is a measue of its inetia fo linea motion.
Physics Chapte 0 - oment of netia Fall 08 The moment of inetia of a otating object is a measue of its otational inetia in the same way that the mass of an object is a measue of its inetia fo linea motion.
Physics C Rotational Motion Name: ANSWER KEY_ AP Review Packet
 Linea and angula analogs Linea Rotation x position x displacement v velocity a T tangential acceleation Vectos in otational motion Use the ight hand ule to detemine diection of the vecto! Don t foget centipetal
Linea and angula analogs Linea Rotation x position x displacement v velocity a T tangential acceleation Vectos in otational motion Use the ight hand ule to detemine diection of the vecto! Don t foget centipetal
17.1 Electric Potential Energy. Equipotential Lines. PE = energy associated with an arrangement of objects that exert forces on each other
 Electic Potential Enegy, PE Units: Joules Electic Potential, Units: olts 17.1 Electic Potential Enegy Electic foce is a consevative foce and so we can assign an electic potential enegy (PE) to the system
Electic Potential Enegy, PE Units: Joules Electic Potential, Units: olts 17.1 Electic Potential Enegy Electic foce is a consevative foce and so we can assign an electic potential enegy (PE) to the system
Chapter 7-8 Rotational Motion
 Chapte 7-8 Rotational Motion What is a Rigid Body? Rotational Kinematics Angula Velocity ω and Acceleation α Unifom Rotational Motion: Kinematics Unifom Cicula Motion: Kinematics and Dynamics The Toque,
Chapte 7-8 Rotational Motion What is a Rigid Body? Rotational Kinematics Angula Velocity ω and Acceleation α Unifom Rotational Motion: Kinematics Unifom Cicula Motion: Kinematics and Dynamics The Toque,
ME 210 Applied Mathematics for Mechanical Engineers
 Tangent and Ac Length of a Cuve The tangent to a cuve C at a point A on it is defined as the limiting position of the staight line L though A and B, as B appoaches A along the cuve as illustated in the
Tangent and Ac Length of a Cuve The tangent to a cuve C at a point A on it is defined as the limiting position of the staight line L though A and B, as B appoaches A along the cuve as illustated in the
Appendix B The Relativistic Transformation of Forces
 Appendix B The Relativistic Tansfomation of oces B. The ou-foce We intoduced the idea of foces in Chapte 3 whee we saw that the change in the fou-momentum pe unit time is given by the expession d d w x
Appendix B The Relativistic Tansfomation of oces B. The ou-foce We intoduced the idea of foces in Chapte 3 whee we saw that the change in the fou-momentum pe unit time is given by the expession d d w x
Physics 201 Lecture 18
 Phsics 0 ectue 8 ectue 8 Goals: Define and anale toque ntoduce the coss poduct Relate otational dnamics to toque Discuss wok and wok eneg theoem with espect to otational motion Specif olling motion (cente
Phsics 0 ectue 8 ectue 8 Goals: Define and anale toque ntoduce the coss poduct Relate otational dnamics to toque Discuss wok and wok eneg theoem with espect to otational motion Specif olling motion (cente
Gauss Law. Physics 231 Lecture 2-1
 Gauss Law Physics 31 Lectue -1 lectic Field Lines The numbe of field lines, also known as lines of foce, ae elated to stength of the electic field Moe appopiately it is the numbe of field lines cossing
Gauss Law Physics 31 Lectue -1 lectic Field Lines The numbe of field lines, also known as lines of foce, ae elated to stength of the electic field Moe appopiately it is the numbe of field lines cossing
Three dimensional flow analysis in Axial Flow Compressors
 1 Thee dimensional flow analysis in Axial Flow Compessos 2 The ealie assumption on blade flow theoies that the flow inside the axial flow compesso annulus is two dimensional means that adial movement of
1 Thee dimensional flow analysis in Axial Flow Compessos 2 The ealie assumption on blade flow theoies that the flow inside the axial flow compesso annulus is two dimensional means that adial movement of
Mechanics Physics 151
 Mechanics Physics 151 Lectue 5 Cental Foce Poblem (Chapte 3) What We Did Last Time Intoduced Hamilton s Pinciple Action integal is stationay fo the actual path Deived Lagange s Equations Used calculus
Mechanics Physics 151 Lectue 5 Cental Foce Poblem (Chapte 3) What We Did Last Time Intoduced Hamilton s Pinciple Action integal is stationay fo the actual path Deived Lagange s Equations Used calculus
06 - ROTATIONAL MOTION Page 1 ( Answers at the end of all questions )
") 06 - ROTATIONAL MOTION Page ) A body A of mass M while falling vetically downwads unde gavity beaks into two pats, a body B of mass ( / ) M and a body C of mass ( / ) M. The cente of mass of bodies B and
06 - ROTATIONAL MOTION Page ) A body A of mass M while falling vetically downwads unde gavity beaks into two pats, a body B of mass ( / ) M and a body C of mass ( / ) M. The cente of mass of bodies B and
FZX: Personal Lecture Notes from Daniel W. Koon St. Lawrence University Physics Department CHAPTER 7
 FZX: Pesonal Lectue Notes fom Daniel W. Koon St. Lawence Univesity Physics Depatment CHAPTER 7 Please epot any glitches, bugs o eos to the autho: dkoon at stlawu.edu. 7. Momentum and Impulse Impulse page
FZX: Pesonal Lectue Notes fom Daniel W. Koon St. Lawence Univesity Physics Depatment CHAPTER 7 Please epot any glitches, bugs o eos to the autho: dkoon at stlawu.edu. 7. Momentum and Impulse Impulse page
Physics 235 Chapter 5. Chapter 5 Gravitation
 Chapte 5 Gavitation In this Chapte we will eview the popeties of the gavitational foce. The gavitational foce has been discussed in geat detail in you intoductoy physics couses, and we will pimaily focus
Chapte 5 Gavitation In this Chapte we will eview the popeties of the gavitational foce. The gavitational foce has been discussed in geat detail in you intoductoy physics couses, and we will pimaily focus
is the instantaneous position vector of any grid point or fluid
 Absolute inetial, elative inetial and non-inetial coodinates fo a moving but non-defoming contol volume Tao Xing, Pablo Caica, and Fed Sten bjective Deive and coelate the govening equations of motion in
Absolute inetial, elative inetial and non-inetial coodinates fo a moving but non-defoming contol volume Tao Xing, Pablo Caica, and Fed Sten bjective Deive and coelate the govening equations of motion in
To Feel a Force Chapter 7 Static equilibrium - torque and friction
 To eel a oce Chapte 7 Chapte 7: Static fiction, toque and static equilibium A. Review of foce vectos Between the eath and a small mass, gavitational foces of equal magnitude and opposite diection act on
To eel a oce Chapte 7 Chapte 7: Static fiction, toque and static equilibium A. Review of foce vectos Between the eath and a small mass, gavitational foces of equal magnitude and opposite diection act on
Circular Motion & Torque Test Review. The period is the amount of time it takes for an object to travel around a circular path once.
 Honos Physics Fall, 2016 Cicula Motion & Toque Test Review Name: M. Leonad Instuctions: Complete the following woksheet. SHOW ALL OF YOUR WORK ON A SEPARATE SHEET OF PAPER. 1. Detemine whethe each statement
Honos Physics Fall, 2016 Cicula Motion & Toque Test Review Name: M. Leonad Instuctions: Complete the following woksheet. SHOW ALL OF YOUR WORK ON A SEPARATE SHEET OF PAPER. 1. Detemine whethe each statement
B. Spherical Wave Propagation
 11/8/007 Spheical Wave Popagation notes 1/1 B. Spheical Wave Popagation Evey antenna launches a spheical wave, thus its powe density educes as a function of 1, whee is the distance fom the antenna. We
11/8/007 Spheical Wave Popagation notes 1/1 B. Spheical Wave Popagation Evey antenna launches a spheical wave, thus its powe density educes as a function of 1, whee is the distance fom the antenna. We
When a mass moves because of a force, we can define several types of problem.
 Mechanics Lectue 4 3D Foces, gadient opeato, momentum 3D Foces When a mass moves because of a foce, we can define seveal types of poblem. ) When we know the foce F as a function of time t, F=F(t). ) When
Mechanics Lectue 4 3D Foces, gadient opeato, momentum 3D Foces When a mass moves because of a foce, we can define seveal types of poblem. ) When we know the foce F as a function of time t, F=F(t). ) When
AST 121S: The origin and evolution of the Universe. Introduction to Mathematical Handout 1
 Please ead this fist... AST S: The oigin and evolution of the Univese Intoduction to Mathematical Handout This is an unusually long hand-out and one which uses in places mathematics that you may not be
Please ead this fist... AST S: The oigin and evolution of the Univese Intoduction to Mathematical Handout This is an unusually long hand-out and one which uses in places mathematics that you may not be
2. Electrostatics. Dr. Rakhesh Singh Kshetrimayum 8/11/ Electromagnetic Field Theory by R. S. Kshetrimayum
 2. Electostatics D. Rakhesh Singh Kshetimayum 1 2.1 Intoduction In this chapte, we will study how to find the electostatic fields fo vaious cases? fo symmetic known chage distibution fo un-symmetic known
2. Electostatics D. Rakhesh Singh Kshetimayum 1 2.1 Intoduction In this chapte, we will study how to find the electostatic fields fo vaious cases? fo symmetic known chage distibution fo un-symmetic known
Dynamics of Rotational Motion
 Dynamics of Rotational Motion Toque: the otational analogue of foce Toque = foce x moment am τ = l moment am = pependicula distance though which the foce acts a.k.a. leve am l l l l τ = l = sin φ = tan
Dynamics of Rotational Motion Toque: the otational analogue of foce Toque = foce x moment am τ = l moment am = pependicula distance though which the foce acts a.k.a. leve am l l l l τ = l = sin φ = tan
ON THE TWO-BODY PROBLEM IN QUANTUM MECHANICS
 ON THE TWO-BODY PROBLEM IN QUANTUM MECHANICS L. MICU Hoia Hulubei National Institute fo Physics and Nuclea Engineeing, P.O. Box MG-6, RO-0775 Buchaest-Maguele, Romania, E-mail: lmicu@theoy.nipne.o (Received
ON THE TWO-BODY PROBLEM IN QUANTUM MECHANICS L. MICU Hoia Hulubei National Institute fo Physics and Nuclea Engineeing, P.O. Box MG-6, RO-0775 Buchaest-Maguele, Romania, E-mail: lmicu@theoy.nipne.o (Received
Static equilibrium requires a balance of forces and a balance of moments.
 Static Equilibium Static equilibium equies a balance of foces and a balance of moments. ΣF 0 ΣF 0 ΣF 0 ΣM 0 ΣM 0 ΣM 0 Eample 1: painte stands on a ladde that leans against the wall of a house at an angle
Static Equilibium Static equilibium equies a balance of foces and a balance of moments. ΣF 0 ΣF 0 ΣF 0 ΣM 0 ΣM 0 ΣM 0 Eample 1: painte stands on a ladde that leans against the wall of a house at an angle
Physics 2B Chapter 22 Notes - Magnetic Field Spring 2018
 Physics B Chapte Notes - Magnetic Field Sping 018 Magnetic Field fom a Long Staight Cuent-Caying Wie In Chapte 11 we looked at Isaac Newton s Law of Gavitation, which established that a gavitational field
Physics B Chapte Notes - Magnetic Field Sping 018 Magnetic Field fom a Long Staight Cuent-Caying Wie In Chapte 11 we looked at Isaac Newton s Law of Gavitation, which established that a gavitational field
Newton s Laws, Kepler s Laws, and Planetary Orbits
 Newton s Laws, Keple s Laws, and Planetay Obits PROBLEM SET 4 DUE TUESDAY AT START OF LECTURE 28 Septembe 2017 ASTRONOMY 111 FALL 2017 1 Newton s & Keple s laws and planetay obits Unifom cicula motion
Newton s Laws, Keple s Laws, and Planetay Obits PROBLEM SET 4 DUE TUESDAY AT START OF LECTURE 28 Septembe 2017 ASTRONOMY 111 FALL 2017 1 Newton s & Keple s laws and planetay obits Unifom cicula motion
VECTOR MECHANICS FOR ENGINEERS: STATICS
 4 Equilibium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Fedinand P. Bee E. Russell Johnston, J. of Rigid Bodies Lectue Notes: J. Walt Ole Texas Tech Univesity Contents Intoduction Fee-Body Diagam
4 Equilibium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Fedinand P. Bee E. Russell Johnston, J. of Rigid Bodies Lectue Notes: J. Walt Ole Texas Tech Univesity Contents Intoduction Fee-Body Diagam
Physics 121 Hour Exam #5 Solution
 Physics 2 Hou xam # Solution This exam consists of a five poblems on five pages. Point values ae given with each poblem. They add up to 99 points; you will get fee point to make a total of. In any given
Physics 2 Hou xam # Solution This exam consists of a five poblems on five pages. Point values ae given with each poblem. They add up to 99 points; you will get fee point to make a total of. In any given
Rotational Motion. Lecture 6. Chapter 4. Physics I. Course website:
 Lectue 6 Chapte 4 Physics I Rotational Motion Couse website: http://faculty.uml.edu/andiy_danylov/teaching/physicsi Today we ae going to discuss: Chapte 4: Unifom Cicula Motion: Section 4.4 Nonunifom Cicula
Lectue 6 Chapte 4 Physics I Rotational Motion Couse website: http://faculty.uml.edu/andiy_danylov/teaching/physicsi Today we ae going to discuss: Chapte 4: Unifom Cicula Motion: Section 4.4 Nonunifom Cicula
- 5 - TEST 1R. This is the repeat version of TEST 1, which was held during Session.
 - 5 - TEST 1R This is the epeat vesion of TEST 1, which was held duing Session. This epeat test should be attempted by those students who missed Test 1, o who wish to impove thei mak in Test 1. IF YOU
- 5 - TEST 1R This is the epeat vesion of TEST 1, which was held duing Session. This epeat test should be attempted by those students who missed Test 1, o who wish to impove thei mak in Test 1. IF YOU
Rotational Motion. Every quantity that we have studied with translational motion has a rotational counterpart
 Rotational Motion & Angula Momentum Rotational Motion Evey quantity that we have studied with tanslational motion has a otational countepat TRANSLATIONAL ROTATIONAL Displacement x Angula Position Velocity
Rotational Motion & Angula Momentum Rotational Motion Evey quantity that we have studied with tanslational motion has a otational countepat TRANSLATIONAL ROTATIONAL Displacement x Angula Position Velocity
From Newton to Einstein. Mid-Term Test, 12a.m. Thur. 13 th Nov Duration: 50 minutes. There are 20 marks in Section A and 30 in Section B.
 Fom Newton to Einstein Mid-Tem Test, a.m. Thu. 3 th Nov. 008 Duation: 50 minutes. Thee ae 0 maks in Section A and 30 in Section B. Use g = 0 ms in numeical calculations. You ma use the following epessions
Fom Newton to Einstein Mid-Tem Test, a.m. Thu. 3 th Nov. 008 Duation: 50 minutes. Thee ae 0 maks in Section A and 30 in Section B. Use g = 0 ms in numeical calculations. You ma use the following epessions
An Exact Solution of Navier Stokes Equation
 An Exact Solution of Navie Stokes Equation A. Salih Depatment of Aeospace Engineeing Indian Institute of Space Science and Technology, Thiuvananthapuam, Keala, India. July 20 The pincipal difficulty in
An Exact Solution of Navie Stokes Equation A. Salih Depatment of Aeospace Engineeing Indian Institute of Space Science and Technology, Thiuvananthapuam, Keala, India. July 20 The pincipal difficulty in
PROBLEM SET #1 SOLUTIONS by Robert A. DiStasio Jr.
 POBLM S # SOLUIONS by obet A. DiStasio J. Q. he Bon-Oppenheime appoximation is the standad way of appoximating the gound state of a molecula system. Wite down the conditions that detemine the tonic and
POBLM S # SOLUIONS by obet A. DiStasio J. Q. he Bon-Oppenheime appoximation is the standad way of appoximating the gound state of a molecula system. Wite down the conditions that detemine the tonic and
CS-184: Computer Graphics. Today
 CS-184: Compute Gaphics Lectue #6: 3D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V2006-F-06-1.0 Today Tansfomations in 3D Rotations Matices Eule angles Eponential maps
CS-184: Compute Gaphics Lectue #6: 3D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V2006-F-06-1.0 Today Tansfomations in 3D Rotations Matices Eule angles Eponential maps
Lecture 13. Rotational motion Moment of inertia
 Lectue 13 Rotational motion Moment of inetia EXAM 2 Tuesday Mach 6, 2018 8:15 PM 9:45 PM Today s Topics: Rotational Motion and Angula Displacement Angula Velocity and Acceleation Rotational Kinematics
Lectue 13 Rotational motion Moment of inetia EXAM 2 Tuesday Mach 6, 2018 8:15 PM 9:45 PM Today s Topics: Rotational Motion and Angula Displacement Angula Velocity and Acceleation Rotational Kinematics
OSCILLATIONS AND GRAVITATION
 1. SIMPLE HARMONIC MOTION Simple hamonic motion is any motion that is equivalent to a single component of unifom cicula motion. In this situation the velocity is always geatest in the middle of the motion,
1. SIMPLE HARMONIC MOTION Simple hamonic motion is any motion that is equivalent to a single component of unifom cicula motion. In this situation the velocity is always geatest in the middle of the motion,
CS-184: Computer Graphics. Today. Lecture #5: 3D Transformations and Rotations. Wednesday, September 7, 11. Transformations in 3D Rotations
 CS-184: Compute Gaphics Lectue #5: D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V011-F-05-1.0 Today Tansfomations in D Rotations Matices Eule angles Eponential maps Quatenions
CS-184: Compute Gaphics Lectue #5: D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V011-F-05-1.0 Today Tansfomations in D Rotations Matices Eule angles Eponential maps Quatenions
Lecture 13 EXAM 2. Today s Topics: Rotational motion Moment of inertia. Tuesday March 8, :15 PM 9:45 PM
 Lectue 13 Rotational motion Moment of inetia EXAM uesday Mach 8, 16 8:15 PM 9:45 PM oday s opics: Rotational Motion and Angula Displacement Angula Velocity and Acceleation Rotational Kinematics Angula
Lectue 13 Rotational motion Moment of inetia EXAM uesday Mach 8, 16 8:15 PM 9:45 PM oday s opics: Rotational Motion and Angula Displacement Angula Velocity and Acceleation Rotational Kinematics Angula
Chapter 13 Gravitation
 Chapte 13 Gavitation In this chapte we will exploe the following topics: -Newton s law of gavitation, which descibes the attactive foce between two point masses and its application to extended objects
Chapte 13 Gavitation In this chapte we will exploe the following topics: -Newton s law of gavitation, which descibes the attactive foce between two point masses and its application to extended objects
Between any two masses, there exists a mutual attractive force.
 YEAR 12 PHYSICS: GRAVITATION PAST EXAM QUESTIONS Name: QUESTION 1 (1995 EXAM) (a) State Newton s Univesal Law of Gavitation in wods Between any two masses, thee exists a mutual attactive foce. This foce
YEAR 12 PHYSICS: GRAVITATION PAST EXAM QUESTIONS Name: QUESTION 1 (1995 EXAM) (a) State Newton s Univesal Law of Gavitation in wods Between any two masses, thee exists a mutual attactive foce. This foce
CS-184: Computer Graphics. Today. Lecture #5: 3D Transformations and Rotations. 05-3DTransformations.key - September 21, 2016
 1 CS-184: Compute Gaphics Lectue #5: D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V016-S-05-1.0 Today Tansfomations in D Rotations Matices Eule angles Eponential maps
1 CS-184: Compute Gaphics Lectue #5: D Tansfomations and Rotations Pof. James O Bien Univesity of Califonia, Bekeley V016-S-05-1.0 Today Tansfomations in D Rotations Matices Eule angles Eponential maps
Lab #9: The Kinematics & Dynamics of. Circular Motion & Rotational Motion
 Reading Assignment: Lab #9: The Kinematics & Dynamics of Cicula Motion & Rotational Motion Chapte 6 Section 4 Chapte 11 Section 1 though Section 5 Intoduction: When discussing motion, it is impotant to
Reading Assignment: Lab #9: The Kinematics & Dynamics of Cicula Motion & Rotational Motion Chapte 6 Section 4 Chapte 11 Section 1 though Section 5 Intoduction: When discussing motion, it is impotant to
UNIT 13: ANGULAR MOMENTUM AND TORQUE AS VECTORS Approximate Classroom Time: Two 100 minute sessions
 Name SFU e-mail @sfu.ca Date(YY/MM/DD) / / Section Goup UNIT 13: ANGULAR MOMENTUM AND TORQUE AS VECTORS Appoximate Classoom Time: Two 100 minute sessions Help! Pue logical thinking cannot yield us any
Name SFU e-mail @sfu.ca Date(YY/MM/DD) / / Section Goup UNIT 13: ANGULAR MOMENTUM AND TORQUE AS VECTORS Appoximate Classoom Time: Two 100 minute sessions Help! Pue logical thinking cannot yield us any
MAGNETIC FIELD AROUND TWO SEPARATED MAGNETIZING COILS
 The 8 th Intenational Confeence of the Slovenian Society fo Non-Destuctive Testing»pplication of Contempoay Non-Destuctive Testing in Engineeing«Septembe 1-3, 5, Potoož, Slovenia, pp. 17-1 MGNETIC FIELD
The 8 th Intenational Confeence of the Slovenian Society fo Non-Destuctive Testing»pplication of Contempoay Non-Destuctive Testing in Engineeing«Septembe 1-3, 5, Potoož, Slovenia, pp. 17-1 MGNETIC FIELD
Translation and Rotation Kinematics
 Tanslation and Rotation Kinematics Oveview: Rotation and Tanslation of Rigid Body Thown Rigid Rod Tanslational Motion: the gavitational extenal foce acts on cente-of-mass F ext = dp sy s dt dv total cm
Tanslation and Rotation Kinematics Oveview: Rotation and Tanslation of Rigid Body Thown Rigid Rod Tanslational Motion: the gavitational extenal foce acts on cente-of-mass F ext = dp sy s dt dv total cm
r cos, and y r sin with the origin of coordinate system located at
 Lectue 3-3 Kinematics of Rotation Duing ou peious lectues we hae consideed diffeent examples of motion in one and seeal dimensions. But in each case the moing object was consideed as a paticle-like object,
Lectue 3-3 Kinematics of Rotation Duing ou peious lectues we hae consideed diffeent examples of motion in one and seeal dimensions. But in each case the moing object was consideed as a paticle-like object,
, and the curve BC is symmetrical. Find also the horizontal force in x-direction on one side of the body. h C
 Umeå Univesitet, Fysik 1 Vitaly Bychkov Pov i teknisk fysik, Fluid Dynamics (Stömningsläa), 2013-05-31, kl 9.00-15.00 jälpmedel: Students may use any book including the textbook Lectues on Fluid Dynamics.
Umeå Univesitet, Fysik 1 Vitaly Bychkov Pov i teknisk fysik, Fluid Dynamics (Stömningsläa), 2013-05-31, kl 9.00-15.00 jälpmedel: Students may use any book including the textbook Lectues on Fluid Dynamics.
3. Electromagnetic Waves II
 Lectue 3 - Electomagnetic Waves II 9 3. Electomagnetic Waves II Last time, we discussed the following. 1. The popagation of an EM wave though a macoscopic media: We discussed how the wave inteacts with
Lectue 3 - Electomagnetic Waves II 9 3. Electomagnetic Waves II Last time, we discussed the following. 1. The popagation of an EM wave though a macoscopic media: We discussed how the wave inteacts with
Physics 4A Chapter 8: Dynamics II Motion in a Plane
 Physics 4A Chapte 8: Dynamics II Motion in a Plane Conceptual Questions and Example Poblems fom Chapte 8 Conceptual Question 8.5 The figue below shows two balls of equal mass moving in vetical cicles.
Physics 4A Chapte 8: Dynamics II Motion in a Plane Conceptual Questions and Example Poblems fom Chapte 8 Conceptual Question 8.5 The figue below shows two balls of equal mass moving in vetical cicles.
Objective Notes Summary
 Objective Notes Summay An object moving in unifom cicula motion has constant speed but not constant velocity because the diection is changing. The velocity vecto in tangent to the cicle, the acceleation
Objective Notes Summay An object moving in unifom cicula motion has constant speed but not constant velocity because the diection is changing. The velocity vecto in tangent to the cicle, the acceleation
EM Boundary Value Problems
 EM Bounday Value Poblems 10/ 9 11/ By Ilekta chistidi & Lee, Seung-Hyun A. Geneal Desciption : Maxwell Equations & Loentz Foce We want to find the equations of motion of chaged paticles. The way to do
EM Bounday Value Poblems 10/ 9 11/ By Ilekta chistidi & Lee, Seung-Hyun A. Geneal Desciption : Maxwell Equations & Loentz Foce We want to find the equations of motion of chaged paticles. The way to do
ω = θ θ o = θ θ = s r v = rω
 Unifom Cicula Motion Unifom cicula motion is the motion of an object taveling at a constant(unifom) speed in a cicula path. Fist we must define the angula displacement and angula velocity The angula displacement
Unifom Cicula Motion Unifom cicula motion is the motion of an object taveling at a constant(unifom) speed in a cicula path. Fist we must define the angula displacement and angula velocity The angula displacement
AH Mechanics Checklist (Unit 2) AH Mechanics Checklist (Unit 2) Circular Motion
 AH Mechanics Checklist (Unit 2) Circular Motion") AH Mechanics Checklist (Unit ) AH Mechanics Checklist (Unit ) Cicula Motion No. kill Done 1 Know that cicula motion efes to motion in a cicle of constant adius Know that cicula motion is conveniently descibed
AH Mechanics Checklist (Unit ) AH Mechanics Checklist (Unit ) Cicula Motion No. kill Done 1 Know that cicula motion efes to motion in a cicle of constant adius Know that cicula motion is conveniently descibed
Physics 181. Assignment 4
 Physics 181 Assignment 4 Solutions 1. A sphee has within it a gavitational field given by g = g, whee g is constant and is the position vecto of the field point elative to the cente of the sphee. This
Physics 181 Assignment 4 Solutions 1. A sphee has within it a gavitational field given by g = g, whee g is constant and is the position vecto of the field point elative to the cente of the sphee. This
Physics 111 Lecture 10. SJ 8th Ed.: Chap Torque, Energy, Rolling. Copyright R. Janow Spring basics, energy methods, 2nd law problems)
") hysics Lectue 0 Toque, Enegy, Rolling SJ 8th Ed.: Chap 0.6 0.9 Recap and Oveview Toque Newton s Second Law fo Rotation Enegy Consideations in Rotational Motion Rolling Enegy Methods Second Law Applications
hysics Lectue 0 Toque, Enegy, Rolling SJ 8th Ed.: Chap 0.6 0.9 Recap and Oveview Toque Newton s Second Law fo Rotation Enegy Consideations in Rotational Motion Rolling Enegy Methods Second Law Applications
Physics 11 Chapter 4: Forces and Newton s Laws of Motion. Problem Solving
 Physics 11 Chapte 4: Foces and Newton s Laws of Motion Thee is nothing eithe good o bad, but thinking makes it so. William Shakespeae It s not what happens to you that detemines how fa you will go in life;
Physics 11 Chapte 4: Foces and Newton s Laws of Motion Thee is nothing eithe good o bad, but thinking makes it so. William Shakespeae It s not what happens to you that detemines how fa you will go in life;
7.2.1 Basic relations for Torsion of Circular Members
 Section 7. 7. osion In this section, the geomety to be consideed is that of a long slende cicula ba and the load is one which twists the ba. Such poblems ae impotant in the analysis of twisting components,
Section 7. 7. osion In this section, the geomety to be consideed is that of a long slende cicula ba and the load is one which twists the ba. Such poblems ae impotant in the analysis of twisting components,
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 18: System of Particles II. Slide 18-1
 Physics 1501 Fall 2008 Mechanics, Themodynamics, Waves, Fluids Lectue 18: System of Paticles II Slide 18-1 Recap: cente of mass The cente of mass of a composite object o system of paticles is the point
Physics 1501 Fall 2008 Mechanics, Themodynamics, Waves, Fluids Lectue 18: System of Paticles II Slide 18-1 Recap: cente of mass The cente of mass of a composite object o system of paticles is the point
15 Solving the Laplace equation by Fourier method
 5 Solving the Laplace equation by Fouie method I aleady intoduced two o thee dimensional heat equation, when I deived it, ecall that it taes the fom u t = α 2 u + F, (5.) whee u: [0, ) D R, D R is the
5 Solving the Laplace equation by Fouie method I aleady intoduced two o thee dimensional heat equation, when I deived it, ecall that it taes the fom u t = α 2 u + F, (5.) whee u: [0, ) D R, D R is the
Exam 3: Equation Summary
 MAACHUETT INTITUTE OF TECHNOLOGY Depatment of Physics Physics 8. TEAL Fall Tem 4 Momentum: p = mv, F t = p, Fext ave t= t f t = Exam 3: Equation ummay = Impulse: I F( t ) = p Toque: τ =,P dp F P τ =,P
MAACHUETT INTITUTE OF TECHNOLOGY Depatment of Physics Physics 8. TEAL Fall Tem 4 Momentum: p = mv, F t = p, Fext ave t= t f t = Exam 3: Equation ummay = Impulse: I F( t ) = p Toque: τ =,P dp F P τ =,P
Math 124B February 02, 2012
 Math 24B Febuay 02, 202 Vikto Gigoyan 8 Laplace s equation: popeties We have aleady encounteed Laplace s equation in the context of stationay heat conduction and wave phenomena. Recall that in two spatial
Math 24B Febuay 02, 202 Vikto Gigoyan 8 Laplace s equation: popeties We have aleady encounteed Laplace s equation in the context of stationay heat conduction and wave phenomena. Recall that in two spatial
PHYSICS NOTES GRAVITATION
 GRAVITATION Newton s law of gavitation The law states that evey paticle of matte in the univese attacts evey othe paticle with a foce which is diectly popotional to the poduct of thei masses and invesely
GRAVITATION Newton s law of gavitation The law states that evey paticle of matte in the univese attacts evey othe paticle with a foce which is diectly popotional to the poduct of thei masses and invesely
Doublet structure of Alkali spectra:
 Doublet stuctue of : Caeful examination of the specta of alkali metals shows that each membe of some of the seies ae closed doublets. Fo example, sodium yellow line, coesponding to 3p 3s tansition, is
Doublet stuctue of : Caeful examination of the specta of alkali metals shows that each membe of some of the seies ae closed doublets. Fo example, sodium yellow line, coesponding to 3p 3s tansition, is
Math Notes on Kepler s first law 1. r(t) kp(t)
 kp(t)") Math 7 - Notes on Keple s fist law Planetay motion and Keple s Laws We conside the motion of a single planet about the sun; fo simplicity, we assign coodinates in R 3 so that the position of the sun is
Math 7 - Notes on Keple s fist law Planetay motion and Keple s Laws We conside the motion of a single planet about the sun; fo simplicity, we assign coodinates in R 3 so that the position of the sun is
Hopefully Helpful Hints for Gauss s Law
 Hopefully Helpful Hints fo Gauss s Law As befoe, thee ae things you need to know about Gauss s Law. In no paticula ode, they ae: a.) In the context of Gauss s Law, at a diffeential level, the electic flux
Hopefully Helpful Hints fo Gauss s Law As befoe, thee ae things you need to know about Gauss s Law. In no paticula ode, they ae: a.) In the context of Gauss s Law, at a diffeential level, the electic flux
Simulation of a 2-link Brachiating Robot with Open-Loop Controllers
 Simulation of a -link Bachiating Robot with Open-oop Contolles David Uffod Nothwesten Univesit June 009 . Poject Oveview The goal of this poject was to wite a complete simulation of a -link swinging obot
Simulation of a -link Bachiating Robot with Open-oop Contolles David Uffod Nothwesten Univesit June 009 . Poject Oveview The goal of this poject was to wite a complete simulation of a -link swinging obot
Lecture 19 Angular momentum. Chapter
 PHYS 172H: Moden Mechanics Fall 2010 Lectue 19 ngula momentum Chapte 11.4 11.7 The angula momentum pinciple dp = F dl =? net d ( p ) d dp = p+ = v γ mv = = 0 The angula momentum pinciple fo a point paticle
PHYS 172H: Moden Mechanics Fall 2010 Lectue 19 ngula momentum Chapte 11.4 11.7 The angula momentum pinciple dp = F dl =? net d ( p ) d dp = p+ = v γ mv = = 0 The angula momentum pinciple fo a point paticle
Electrostatics (Electric Charges and Field) #2 2010
 #2 2010") Electic Field: The concept of electic field explains the action at a distance foce between two chaged paticles. Evey chage poduces a field aound it so that any othe chaged paticle expeiences a foce when
Electic Field: The concept of electic field explains the action at a distance foce between two chaged paticles. Evey chage poduces a field aound it so that any othe chaged paticle expeiences a foce when
Voltage ( = Electric Potential )
") V-1 of 10 Voltage ( = lectic Potential ) An electic chage altes the space aound it. Thoughout the space aound evey chage is a vecto thing called the electic field. Also filling the space aound evey chage
V-1 of 10 Voltage ( = lectic Potential ) An electic chage altes the space aound it. Thoughout the space aound evey chage is a vecto thing called the electic field. Also filling the space aound evey chage
Particle Systems. University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell
 Paticle Systems Univesity of Texas at Austin CS384G - Compute Gaphics Fall 2010 Don Fussell Reading Requied: Witkin, Paticle System Dynamics, SIGGRAPH 97 couse notes on Physically Based Modeling. Witkin
Paticle Systems Univesity of Texas at Austin CS384G - Compute Gaphics Fall 2010 Don Fussell Reading Requied: Witkin, Paticle System Dynamics, SIGGRAPH 97 couse notes on Physically Based Modeling. Witkin
( ) [ ] [ ] [ ] δf φ = F φ+δφ F. xdx.
![( ) [ ] [ ] [ ] δf φ = F φ+δφ F. xdx.](/thumbs/90/103689049.jpg "( ) [ ] [ ] [ ] δf φ = F φ+δφ F. xdx.") 9. LAGRANGIAN OF THE ELECTROMAGNETIC FIELD In the pevious section the Lagangian and Hamiltonian of an ensemble of point paticles was developed. This appoach is based on a qt. This discete fomulation can
9. LAGRANGIAN OF THE ELECTROMAGNETIC FIELD In the pevious section the Lagangian and Hamiltonian of an ensemble of point paticles was developed. This appoach is based on a qt. This discete fomulation can
TheWaveandHelmholtzEquations
 TheWaveandHelmholtzEquations Ramani Duaiswami The Univesity of Mayland, College Pak Febuay 3, 2006 Abstact CMSC828D notes (adapted fom mateial witten with Nail Gumeov). Wok in pogess 1 Acoustic Waves 1.1
TheWaveandHelmholtzEquations Ramani Duaiswami The Univesity of Mayland, College Pak Febuay 3, 2006 Abstact CMSC828D notes (adapted fom mateial witten with Nail Gumeov). Wok in pogess 1 Acoustic Waves 1.1
Lab 10: Newton s Second Law in Rotation
 Lab 10: Newton s Second Law in Rotation We can descibe the motion of objects that otate (i.e. spin on an axis, like a popelle o a doo) using the same definitions, adapted fo otational motion, that we have
Lab 10: Newton s Second Law in Rotation We can descibe the motion of objects that otate (i.e. spin on an axis, like a popelle o a doo) using the same definitions, adapted fo otational motion, that we have
KEPLER S LAWS OF PLANETARY MOTION
 EPER S AWS OF PANETARY MOTION 1. Intoduction We ae now in a position to apply what we have leaned about the coss poduct and vecto valued functions to deive eple s aws of planetay motion. These laws wee
EPER S AWS OF PANETARY MOTION 1. Intoduction We ae now in a position to apply what we have leaned about the coss poduct and vecto valued functions to deive eple s aws of planetay motion. These laws wee
Physics NYB problem set 5 solution
 Physics NY poblem set 5 solutions 1 Physics NY poblem set 5 solution Hello eveybody, this is ED. Hi ED! ED is useful fo dawing the ight hand ule when you don t know how to daw. When you have a coss poduct
Physics NY poblem set 5 solutions 1 Physics NY poblem set 5 solution Hello eveybody, this is ED. Hi ED! ED is useful fo dawing the ight hand ule when you don t know how to daw. When you have a coss poduct
Chapter. s r. check whether your calculator is in all other parts of the body. When a rigid body rotates through a given angle, all
 conveted to adians. Also, be sue to vanced to a new position (Fig. 7.2b). In this inteval, the line OP has moved check whethe you calculato is in all othe pats of the body. When a igid body otates though
conveted to adians. Also, be sue to vanced to a new position (Fig. 7.2b). In this inteval, the line OP has moved check whethe you calculato is in all othe pats of the body. When a igid body otates though
Chapter 12. Kinetics of Particles: Newton s Second Law
 Chapte 1. Kinetics of Paticles: Newton s Second Law Intoduction Newton s Second Law of Motion Linea Momentum of a Paticle Systems of Units Equations of Motion Dynamic Equilibium Angula Momentum of a Paticle
Chapte 1. Kinetics of Paticles: Newton s Second Law Intoduction Newton s Second Law of Motion Linea Momentum of a Paticle Systems of Units Equations of Motion Dynamic Equilibium Angula Momentum of a Paticle
Physics 1114: Unit 5 Hand-out Homework (Answers)
") Physics 1114: Unit 5 Hand-out Homewok (Answes) Poblem set 1 1. The flywheel on an expeimental bus is otating at 420 RPM (evolutions pe minute). To find (a) the angula velocity in ad/s (adians/second),
Physics 1114: Unit 5 Hand-out Homewok (Answes) Poblem set 1 1. The flywheel on an expeimental bus is otating at 420 RPM (evolutions pe minute). To find (a) the angula velocity in ad/s (adians/second),
PHYS 1444 Lecture #5
 Shot eview Chapte 24 PHYS 1444 Lectue #5 Tuesday June 19, 212 D. Andew Bandt Capacitos and Capacitance 1 Coulom s Law The Fomula QQ Q Q F 1 2 1 2 Fomula 2 2 F k A vecto quantity. Newtons Diection of electic
Shot eview Chapte 24 PHYS 1444 Lectue #5 Tuesday June 19, 212 D. Andew Bandt Capacitos and Capacitance 1 Coulom s Law The Fomula QQ Q Q F 1 2 1 2 Fomula 2 2 F k A vecto quantity. Newtons Diection of electic
PHYS 110B - HW #7 Spring 2004, Solutions by David Pace Any referenced equations are from Griffiths Problem statements are paraphrased
 PHYS 0B - HW #7 Sping 2004, Solutions by David Pace Any efeenced euations ae fom Giffiths Poblem statements ae paaphased. Poblem 0.3 fom Giffiths A point chage,, moves in a loop of adius a. At time t 0
PHYS 0B - HW #7 Sping 2004, Solutions by David Pace Any efeenced euations ae fom Giffiths Poblem statements ae paaphased. Poblem 0.3 fom Giffiths A point chage,, moves in a loop of adius a. At time t 0
CHAPTER 25 ELECTRIC POTENTIAL
 CHPTE 5 ELECTIC POTENTIL Potential Diffeence and Electic Potential Conside a chaged paticle of chage in a egion of an electic field E. This filed exets an electic foce on the paticle given by F=E. When
CHPTE 5 ELECTIC POTENTIL Potential Diffeence and Electic Potential Conside a chaged paticle of chage in a egion of an electic field E. This filed exets an electic foce on the paticle given by F=E. When
F(r) = r f (r) 4.8. Central forces The most interesting problems in classical mechanics are about central forces.
 = r f (r) 4.8. Central forces The most interesting problems in classical mechanics are about central forces.") 4.8. Cental foces The most inteesting poblems in classical mechanics ae about cental foces. Definition of a cental foce: (i) the diection of the foce F() is paallel o antipaallel to ; in othe wods, fo
4.8. Cental foces The most inteesting poblems in classical mechanics ae about cental foces. Definition of a cental foce: (i) the diection of the foce F() is paallel o antipaallel to ; in othe wods, fo
Many Electron Atoms. Electrons can be put into approximate orbitals and the properties of the many electron systems can be catalogued
 Many Electon Atoms The many body poblem cannot be solved analytically. We content ouselves with developing appoximate methods that can yield quite accuate esults (but usually equie a compute). The electons
Many Electon Atoms The many body poblem cannot be solved analytically. We content ouselves with developing appoximate methods that can yield quite accuate esults (but usually equie a compute). The electons
Uniform Circular Motion
 Unifom Cicula Motion Have you eve idden on the amusement pak ide shown below? As it spins you feel as though you ae being pessed tightly against the wall. The ide then begins to tilt but you emain glued
Unifom Cicula Motion Have you eve idden on the amusement pak ide shown below? As it spins you feel as though you ae being pessed tightly against the wall. The ide then begins to tilt but you emain glued
Exam 3: Equation Summary
 MAACHUETT INTITUTE OF TECHNOLOGY Depatment of Physics Physics 8. TEAL Fall Tem 4 Momentum: p = mv, F t = p, Fext ave t= t f t = Exam 3: Equation ummay = Impulse: I F( t ) = p Toque: τ =,P dp F P τ =,P
MAACHUETT INTITUTE OF TECHNOLOGY Depatment of Physics Physics 8. TEAL Fall Tem 4 Momentum: p = mv, F t = p, Fext ave t= t f t = Exam 3: Equation ummay = Impulse: I F( t ) = p Toque: τ =,P dp F P τ =,P
COUPLED MODELS OF ROLLING, SLIDING AND WHIRLING FRICTION
 ENOC 008 Saint Petesbug Russia June 30-July 4 008 COUPLED MODELS OF ROLLING SLIDING AND WHIRLING FRICTION Alexey Kieenkov Ins ti tu te fo P ob le ms in Me ch an ic s Ru ss ia n Ac ad em y of Sc ie nc es
ENOC 008 Saint Petesbug Russia June 30-July 4 008 COUPLED MODELS OF ROLLING SLIDING AND WHIRLING FRICTION Alexey Kieenkov Ins ti tu te fo P ob le ms in Me ch an ic s Ru ss ia n Ac ad em y of Sc ie nc es
AP Physics - Coulomb's Law
 AP Physics - oulomb's Law We ve leaned that electons have a minus one chage and potons have a positive one chage. This plus and minus one business doesn t wok vey well when we go in and ty to do the old
AP Physics - oulomb's Law We ve leaned that electons have a minus one chage and potons have a positive one chage. This plus and minus one business doesn t wok vey well when we go in and ty to do the old
When two numbers are written as the product of their prime factors, they are in factored form.
 10 1 Study Guide Pages 420 425 Factos Because 3 4 12, we say that 3 and 4 ae factos of 12. In othe wods, factos ae the numbes you multiply to get a poduct. Since 2 6 12, 2 and 6 ae also factos of 12. The
10 1 Study Guide Pages 420 425 Factos Because 3 4 12, we say that 3 and 4 ae factos of 12. In othe wods, factos ae the numbes you multiply to get a poduct. Since 2 6 12, 2 and 6 ae also factos of 12. The
Magnetic Dipoles Challenge Problem Solutions
 Magnetic Dipoles Challenge Poblem Solutions Poblem 1: Cicle the coect answe. Conside a tiangula loop of wie with sides a and b. The loop caies a cuent I in the diection shown, and is placed in a unifom
Magnetic Dipoles Challenge Poblem Solutions Poblem 1: Cicle the coect answe. Conside a tiangula loop of wie with sides a and b. The loop caies a cuent I in the diection shown, and is placed in a unifom
Analytical time-optimal trajectories for an omni-directional vehicle
 Analytical time-optimal tajectoies fo an omni-diectional vehicle Weifu Wang and Devin J. Balkcom Abstact We pesent the fist analytical solution method fo finding a time-optimal tajectoy between any given
Analytical time-optimal tajectoies fo an omni-diectional vehicle Weifu Wang and Devin J. Balkcom Abstact We pesent the fist analytical solution method fo finding a time-optimal tajectoy between any given
Chapter 5 Force and Motion
 Chapte 5 Foce and Motion In chaptes 2 and 4 we have studied kinematics i.e. descibed the motion of objects using paametes such as the position vecto, velocity and acceleation without any insights as to
Chapte 5 Foce and Motion In chaptes 2 and 4 we have studied kinematics i.e. descibed the motion of objects using paametes such as the position vecto, velocity and acceleation without any insights as to
3-7 FLUIDS IN RIGID-BODY MOTION
 3-7 FLUIDS IN IGID-BODY MOTION S-1 3-7 FLUIDS IN IGID-BODY MOTION We ae almost eady to bein studyin fluids in motion (statin in Chapte 4), but fist thee is one cateoy of fluid motion that can be studied
3-7 FLUIDS IN IGID-BODY MOTION S-1 3-7 FLUIDS IN IGID-BODY MOTION We ae almost eady to bein studyin fluids in motion (statin in Chapte 4), but fist thee is one cateoy of fluid motion that can be studied
Circular-Rotational Motion Mock Exam. Instructions: (92 points) Answer the following questions. SHOW ALL OF YOUR WORK.
 Answer the following questions. SHOW ALL OF YOUR WORK.") AP Physics C Sping, 2017 Cicula-Rotational Motion Mock Exam Name: Answe Key M. Leonad Instuctions: (92 points) Answe the following questions. SHOW ALL OF YOUR WORK. ( ) 1. A stuntman dives a motocycle
AP Physics C Sping, 2017 Cicula-Rotational Motion Mock Exam Name: Answe Key M. Leonad Instuctions: (92 points) Answe the following questions. SHOW ALL OF YOUR WORK. ( ) 1. A stuntman dives a motocycle
Physics 107 TUTORIAL ASSIGNMENT #8
 Physics 07 TUTORIAL ASSIGNMENT #8 Cutnell & Johnson, 7 th edition Chapte 8: Poblems 5,, 3, 39, 76 Chapte 9: Poblems 9, 0, 4, 5, 6 Chapte 8 5 Inteactive Solution 8.5 povides a model fo solving this type
Physics 07 TUTORIAL ASSIGNMENT #8 Cutnell & Johnson, 7 th edition Chapte 8: Poblems 5,, 3, 39, 76 Chapte 9: Poblems 9, 0, 4, 5, 6 Chapte 8 5 Inteactive Solution 8.5 povides a model fo solving this type