AUTOMATIC CONTROL ENGINEERING HINCHEY
|
|
|
- Ronald Dickerson
- 5 years ago
- Views:
Transcription
1 AUTOMATIC CONTROL ENGINEERING HINCHEY
2 AUTOMATIC CONTROL ENGINEERING FEEDBACK CONTROL CONCEPT The sketch on the next page shows a typical feedback or error driven control system. What has to be controlled is generally referred to as the plant. What the plant is doing is known as its response. What it should be doing is known as the command. The plant receives a control signal from a drive and a disturbance signal from the surroundings. The goal is to pick a controller that can make the response follow closely command signals but reject disturbances. The controller acts on an error signal: this is command minus some measure of the response. This is why it is usually called error driven control. Two types of error driven control are PID and Switching. PID stands for proportional integral derivative. Proportional generates a signal which is proportional to error. Integral generates a signal which is proportional to the integral of the error. Derivative generates a signal which is proportional to the rate of change of error. Switching generally gives out signals with constant levels. AUTONOMOUS UNDERWATER VEHICLE DEPTH CONTROL To illustrate some error driven control strategies we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. According to Newton's Second Law of Motion, the equation governing its up and down motion is: M d 2 R/dt 2 = B + D - W
3
4
5 where R is the depth of the auv, M is its overall mass, B is the control force from the propulsion system, D is a disturbance load caused for example by sudden weight changes and W is a drag load. Drag load has two components: wake drag and wall drag: W = X dr/dt dr/dt + Y dr/dt where X and Y account mainly for the size and shape of the auv. A simple model of the propulsion system is: J db/dt + I B = Q where Q is the control signal. There are two basic types of propulsion systems that could be used to move the auv up and down. One is an air/water ballast tank. In this case, the control signal Q would produce a change in buoyancy and J would account for the fact that this is caused by a flow: I would be zero. If J was very large, the control force B would build up very slowly. The other type of propulsion system uses motor driven propellors to generate B. Usually, for protection, these would be located inside a duct. In this case, I would account for the size and shape of the blades and duct, while J would account for things like rotor inertia. Again, if J was very large, the control force B would build up very slowly. One could determine J and I experimentally. The PID error driven strategy lets the control signal Q be:
6 Q = KP E + KI Edτ + KD de/dt where E = C - R is the depth error and KP KI KD are gains: C is the command depth. Usually, gains are constants. However, they can be made a function of the state of the system or its surroundings. In this case, control is said to be adaptive. Imagine the auv is at the water surface and it suddenly commanded to go to some constant command depth C. Assume that there is a disturbance with a constant level D acting downward. Also assume the auv is using motor driven propellors for propulsion. Proportional by itself would cause the propellors to spin in such a way that the auv would move towards the command depth. The amount of spin would be proportional to depth error. When the auv reaches the command depth, the proportional control signal would be zero. If the auv was held at the command depth, its propellors would stop spinning. The disturbance would cause the auv to stop below the command depth. This offset would be such that the propellors generate just enough upward force to balance the downward disturbance. The offset would be DI/KP. When D is known, something called feedforward compensation can be used to get rid of the offset. Basically, we measure D and subtract ID from Q in the drive equation. When motions settle down, the drive gives out an extra signal minus D which cancels D. But we must know D. Another way to get rid of the offset is to give the auv a false
7 command C *. If the false command C * was set at [C-DI/KP], the auv would end up at C. It would hang below C * by DI/KP and thus end up at C. If the gain KP was very large, offsets such as DI/KP would probably be tolerable. However, large gain would generate very large Q when the depth is well away from the command depth. Very large Q could burn out drives. To avoid this, a limit is usually put on the magnitude of Q. In this case, the control is referred to as proportional with saturation. If the disturbance was greater than the saturation limits, then control would be impossible. Integral by itself would cause the propellors to spin in such a way that the auv would move towards the command depth. The amount of spin would be proportional to the integral of depth error. As the auv moves towards the command depth, the propellors would spin faster and faster. Obviously, this would cause the auv to overshoot the command depth. Because of these overshoots, integral cannot be used alone. The good thing about integral is, if the system is stable, it gives zero offsets. If the auv was held with positive depth error, the integral control signal would get bigger and bigger. This is known as integral windup. If it was released after a long time, it would take a very large integrated negative error to cancel out the windup due to integrated positive error. A simple way to avoid integral windup is to activate integral only within a band surrounding the command depth. All we need is for the band to be wide enough for proportional to get the auv within the band so that integral can then home it into the command depth. Derivative like integral cannot be used alone. Assume that the
8 command C is a constant, and let the auv be stopped far away from the command depth. In this case, de/dt would be zero. So, the controller would not generate a force to move the auv to the command depth. Derivative mimics drag load and helps motions settle down. It generates a control signal which opposes motion. Something called rate feedback could also be used to help make motions settle down. The controller would act on depth error E minus a constant times the depth rate dr/dt. Substitution into the governing equations shows that rate feedback mimics drag. Note that derivative could be used to make the auv move at a constant speed: dc/dt is made a constant. Drag and the dr/dt part of de/dt would tend to limit speed. With all three components of PID acting together, as soon as the auv passes through the command depth, proportional would tend to counteract integral. Also, proportional would get the auv closer to the command depth faster, so it would limit integral windup. Derivative would help counteract overshoots. The auv would home in quickly on the command depth with minimal overshoots. So, we get the good characteristics of all three controllers. There are many types of switching control. They often have trouble with overshoots. Basic relay switching is the simplest. It would try to make the propellors rotate at a constant speed: the direction of rotation would depend on the sign of depth error. Relay with deadband would allow the auv to drift once it gets inside a band surrounding the command depth. The propulsion device
9 would be shut down and drag load would cause the auv to slow down. Relay with hysteresis would reverse the direction of control before the auv gets to the command depth. In this case, the propulsion device would act as a brake. A bias signal could be added to counteract disturbances. Propulsion system dynamics would cause the control force to lag the control signal. The amount of lag depends on how large J is relative to I. Consider the case where proportional control is acting alone and the error is initially positive. For a slowly reacting propulsion system, positive error would cause a positive control force to gradually build up. As it builds up, this force would move the auv towards the command depth. However, when the auv gets to the command depth, because of lag, the control force would still be positive, and this would cause overshoot. In some cases, these overshoots would settle down. In other cases, they would not settle down but would limit because of wake drag. Control signals for an auv would be generated within a computer control loop. The loop period must be much smaller than the basic period of auv motion: otherwise severe overshoots could develop. If the auv was controlled remotely by a computer onboard a ship, the time taken for the depth signal to travel from the auv to the ship and the time taken for the drive signal to travel back from the ship to the auv could cause overshoots, because the auv would be responding to past error not present error.
10 SUBSEA ROBOT SPRING/DASHPOT PID ANALOGY Equations governing subsea robot depth motion are: M d 2 R/dt 2 + X dr/dt dr/dt + Y dr/dt = B + D J db/dt + I B = Q Q = K P (C-R) + K I (C-R)dτ + K D (dc/dt-dr/dt) Let the drive be a propellor in a duct driven by a DC motor. For most of what follows, we will assume that the drive is fast acting, so that J is approximately zero. In this case, B = K P /I (C-R) + K I /I (C-R)dτ + K D /I (dc/dt-dr/dt) B = K P (C-R) + K I (C-R)dτ + K D (dc/dt-dr/dt) We will also assume that the robot is initially at one depth and it is suddenly commanded to go to another depth. When proportional control is acting alone, the control force B is a linear function of depth error. This pulls the robot towards the command depth. As the robot approaches the command depth, the propellor slows down. Note that a spring with its ends attached to the robot and the command depth would move the robot the same way. Because the drive is spring like, disturbances D cause the robot to settle down away from the command depth. When integral control is acting alone, the control force B gradually builds up and pulls the robot towards the command depth. As the robot approaches the command depth, the propellor goes faster and faster. This causes the robot to
11 overshoot the command depth. As soon as it overshoots, the control force starts to decrease: meaning the propellor starts to slow down. It takes time for the control force to go to zero. Beyond this point, the control force changes sign and acts initially like a brake and causes the robot to stop and then start back towards the command depth. Again, when it reaches the command depth, it overshoots it. These overshoots do not settle down. If they did, B would equal minus D and R would equal C. One could replace the integral drive with a spring with one end attached to the robot and the other end free to move. Initially the free end moves towards the command depth. This causes the spring to stretch and pull the robot towards the command depth. The spring stretching mimics the integration of error. The spring keeps stretching until the robot overshoots the command depth. Then, it gradually slackens. It takes time for the spring to totally slacken so it pulls the robot beyond the command depth. When the spring is totally slack, the free end starts back towards the command depth. In this case, the spring acts initially like a brake and causes the robot to stop and then start back towards the command depth. With proportional and integral acting together it is possible for the robot to settle at the command depth. Proportional suppresses the overshoots caused by integral and integral gets rid of offsets. Derivative control is not spring like. The equation for B shows that it instead mimics a dashpot. When the drive is slow acting, control actions are not instantaneous. This can cause severe overshoots.
12 CAR/DRIVER PID ANALOGY Imagine a car at position A on a straight road that is suddenly commanded to go to position B on the same road. A proportional driver would suddenly depress the gas peddle down to some level. This would cause the car to gradually pick up speed. As the car moves towards B, the driver would depress the gas peddle less and less. The amount of depression would be a linear function of position error or distance between B and the car position. When the car reaches B, peddle depression would be zero. Because of its momentum, the car would overshoot B. As soon as it does so, the driver would suddenly put the car into reverse and depress the gas peddle an amount again dependent on position error. This would cause the car to gradually come to a stop and reverse direction back towards B. If there was no wind and the road was horizontal, wake drag and drive friction would gradually make the car come to rest at B. Otherwise, it would come to rest away from B. An integral driver starting at A would gradually depress the gas peddle based on the integral of position error. This would move the car towards B but at a faster and faster speed. When the car reaches B, peddle depression would be maximum. Obviously, the car would overshoot B. As soon as it does so, the driver would gradually depress the gas peddle less and less. Basically, the position error would now be negative, and
13 integrated error would gradually decrease. When it reaches zero, the peddle depression would also be zero, and the driver would suddenly put the car into reverse and gradually depress the gas peddle again based on the integral of position error. This would cause the car to gradually come to a stop and reverse direction back towards B. When the car reaches B, it would again overshoot. The car would never settle at B but would oscillate back and forth at an amplitude dependent on wake drag and drive friction. The mean position error would be zero, even when there was wind or the road was not horizontal. A proportional plus integral driver could make the car settle at B, even when there was wind or the road was not horizontal. The proportional part would bring the car close to B before the integral part could build up too much signal. The integral part would then home the car into B. Whereas the proportional plus integral driver would work only the gas peddle, a proportional plus integral plus derivative driver would also use the brake. The derivative part would apply the brake an amount based on speed. This would help control overshoots if they are a problem. Driver reaction time could cause severe overshoots. Its control is based on past error not present error.
14 ZIEGLER NICHOLS GAINS Ziegler and Nichols, through a series of experiments on simple systems, developed criteria for picking gains in a controller that would give good tracking performance. For a system that can be made unstable with proportional acting alone, the procedure they recommend is as follows. With proportional acting alone, increase its gain until the system becomes borderline stable. Let the borderline gain be KP: let its period be TP. According to Ziegler and Nichols, reasonable PID gains are: KP = 0.6*KP KI = KP/TI KD = KP*TD TI = 0.5*TP TD = 0.125*TP When only proportional and integral are acting, they recommend the following PI gains: KP = 0.45*KP KI = KP/TI TI = 0.83*TP When only proportional is acting, they recommend: KP = 0.5*KP
15 AUTONOMOUS UNDERWATER VEHICLE ZIEGLER NICHOLS GAINS To illustrate a procedure for getting Ziegler Nichols gains, we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. According to Newton's Second Law of Motion, the equation governing the up and down motion of the auv is: M d 2 R/dt 2 = B + D - W where R is the depth of the auv, M is its overall mass, B is the control force from the propulsion system, D is a disturbance load caused for example by sudden weight changes and W is a drag load consisting of wake drag and wall drag: W = X dr/dt dr/dt + Y dr/dt where X and Y account for the size and shape of the auv. Here we linearize the drag to get: W = N dr/dt A simple model of the propulsion system is: J db/dt + I B = Q where Q is the control signal: J and I are drive constants.
16 The PID error driven strategy lets the control signal Q be: Q = KP E + KI Edτ + KD de/dt where E = C - R is the depth error and KP KI KD are the controller gains: C is the command depth. To get Ziegler Nichols gains, we start by assuming only proportional is active. Manipulation of the governing equations gives: J [ M d 3 R/dt 3 + N d 2 R/dt 2 - dd/dt] + I [ M d 2 R/dt 2 + N dr/dt - D ] = KP C - KP R We then assume that C and D are both constants and that the auv is undergoing a limit cycle oscillation for which R = Ro + R Sin [ t] Substitution into the modified drive equation gives - J M 3 R Cos[ t] - J N 2 R Sin[ t] - I M 2 R Sin[ t] + I N R Cos[ t] - I Do = KP Co - KP Ro - KP R Sin[ t] This equation is of the form:
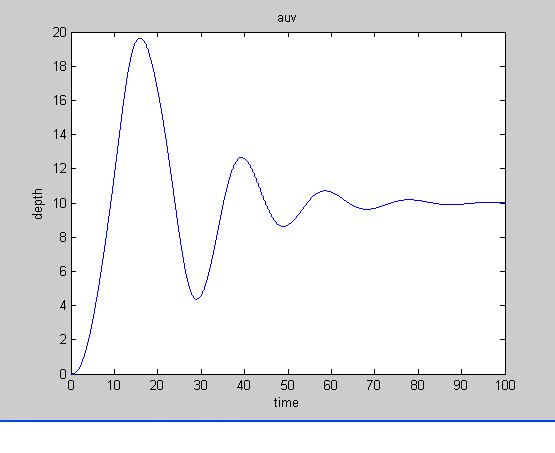
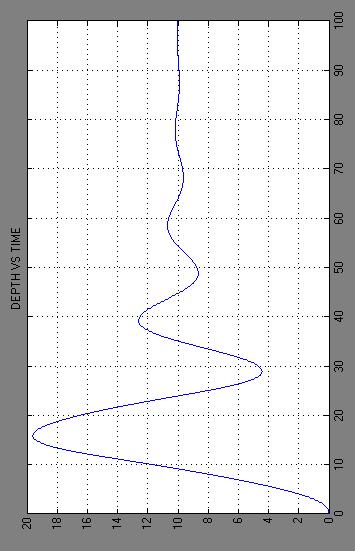
17 i Sin[ t] + j Cos[ t] + k = 0 Mathematics requires that i=0 j=0 k=0: - J N 2 - I M 2 + KP = 0 - J M 3 + I N = 0 + I Do + KP Co - KP Ro = 0 Manipulation of these equations gives Ro = Co + I Do / KP 2 = [I N] / [J M] KP = [J N + I M] 2 = [J N + I M] [I N] / [J M] For the illustration we let : M=50 N=50 J=0.5 I=0.1. The above equations give =0.447, KP=6 and TP=14. Substitution into the Ziegler Nichols gains equations gives: KP = 3.6; KI = 0.54; KD = 6.3. An m code for the auv is given below. This is followed by a Ziegler Nichols response generated by the code. A SIMULINK Block diagram follows the m code response. It gives basically the same response as the code.
18
19
20
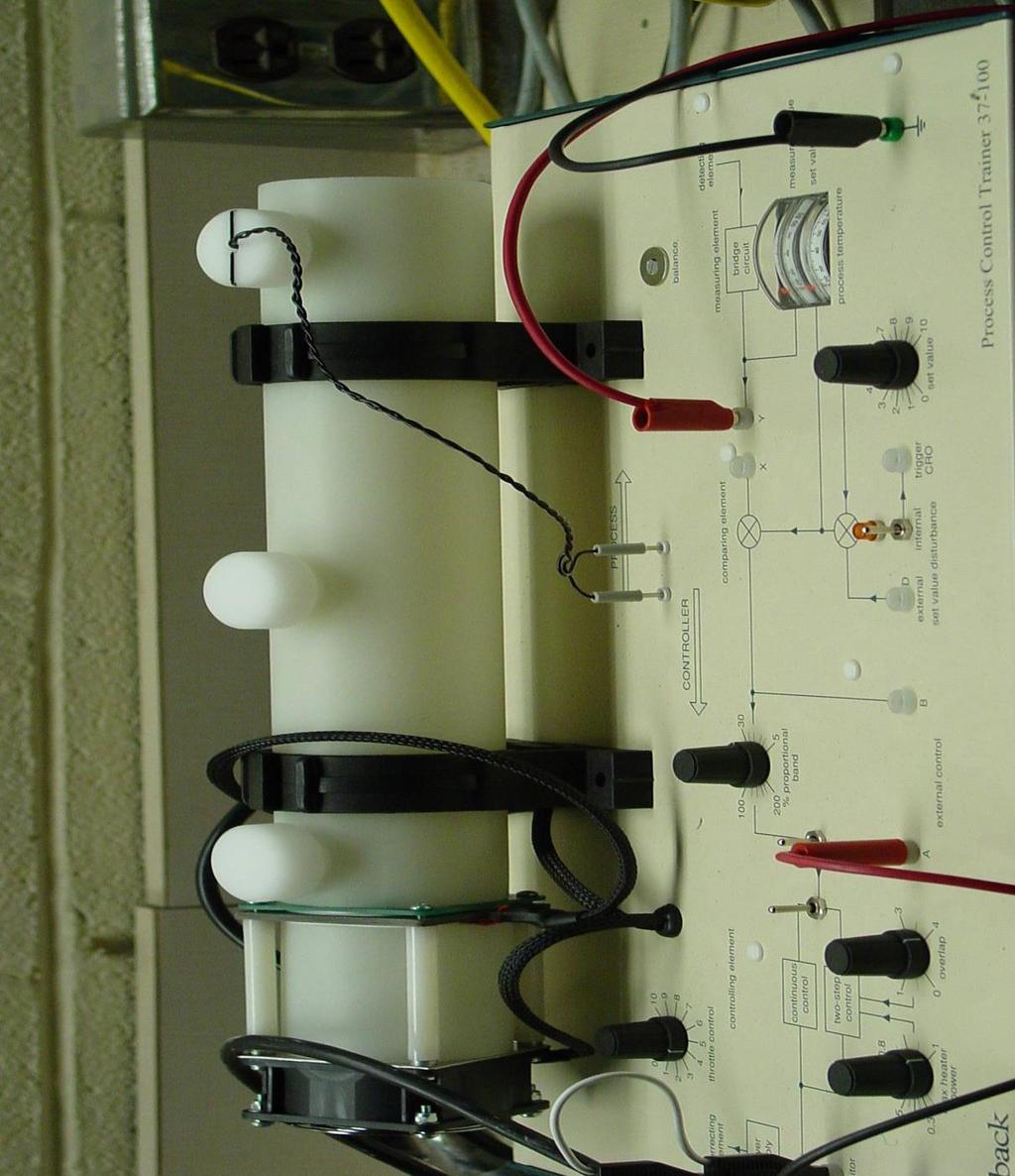
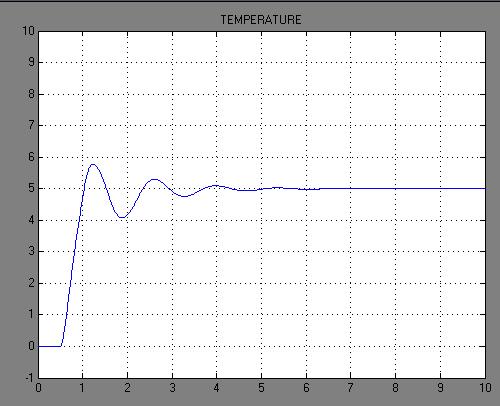
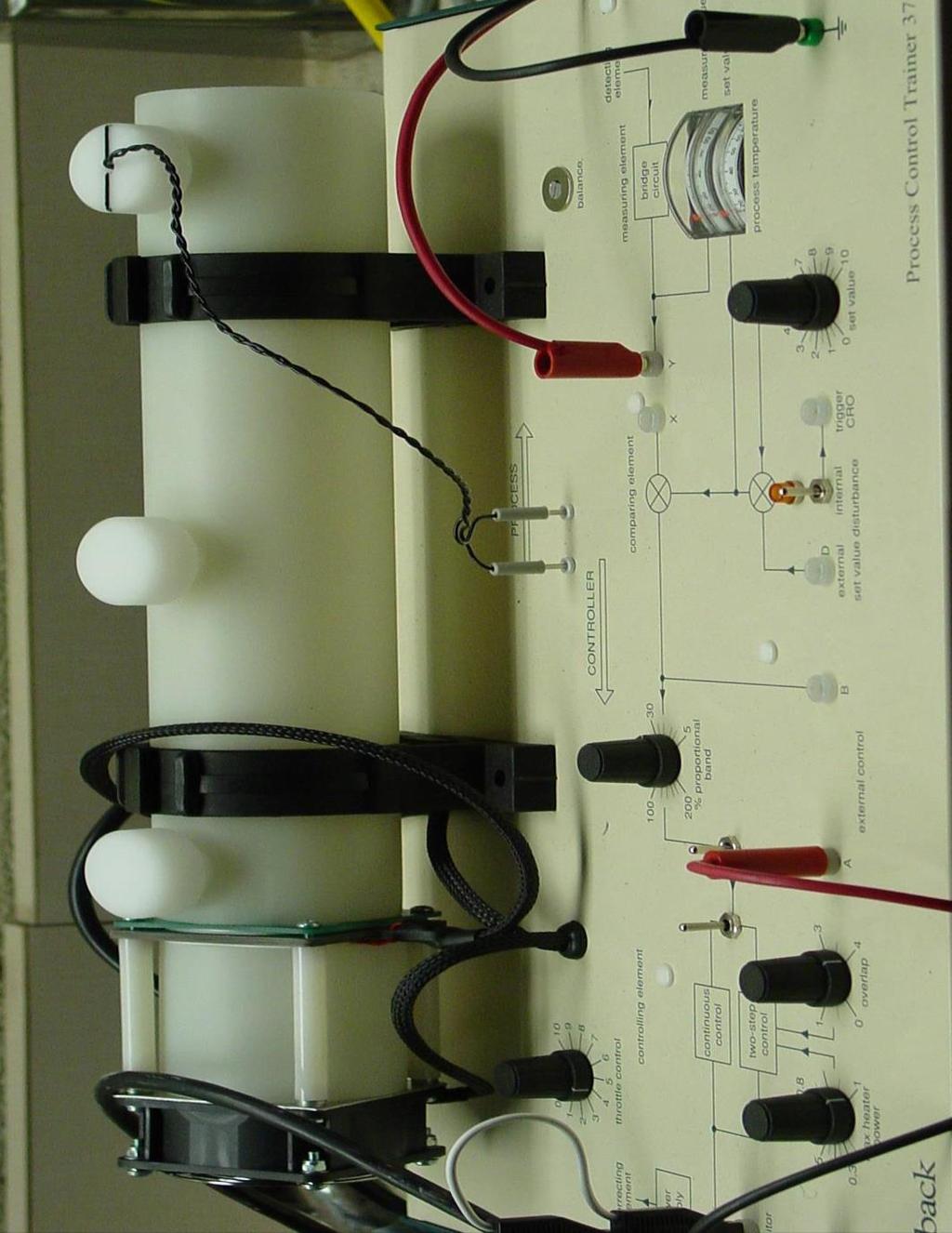
21 PIPE FLOW SETUP ZIEGLER NICHOLS GAINS To illustrate a procedure for getting Ziegler Nichols gains, we will consider the task of controlling the temperature of the air flowing down the pipe in the lab pipe flow setup. Basically the setup consists of a fan which draws air from atmosphere and sends it down a pipe. A heater just downstream of the fan is used to heat the air. It receives a signal from a controller. The temperature of the air at the pipe exit is measured by a thermistor. The governing equations are: X dr/dt + Y R = H + D A dh/dt + B H = Z Q Q = KP E + KI Edτ + KD de/dt E = C - R where R is the temperature of the air at the heater, R is the temperature of the air at the sensor, C is the command temperature, E is the temperature error, Q is the control signal, H is the heat generated by the heater, D is a disturbance heat and KP KI KD are the controller gains. Note that R is what R was T seconds back in time: T is the time it takes for the air to travel down the pipe.
22 To get Ziegler Nichols gains, we start by assuming only proportional is active. Manipulation of the governing equations gives: A [ X d 2 R/dt 2 + Y dr/dt - dd/dt] + B ( X dr/dt + Y R - D) = Z KP C - Z KP R We then assume that C and D are both constants and that the setup is undergoing a limit cycle oscillation for which R = Ro + R Sin [ t] R = Ro + R Sin [ (t-t)] Substitution into the modified drive equation gives - A X 2 R Sin[ t] + A Y R Cos[ t] + B X R Cos[ t] + B Y Ro + B Y R Sin[ t] - B Do = Z KP Co - Z KP Ro - Z KP R Sin[ (t-t)] A trigonometric identity gives Sin[ (t-t)] = Sin[ t] Cos[ T] - Cos[ t] Sin[ T] Substitution into the modified drive equation gives an equation of the form i Sin[ t] + j Cos[ t] + k = 0
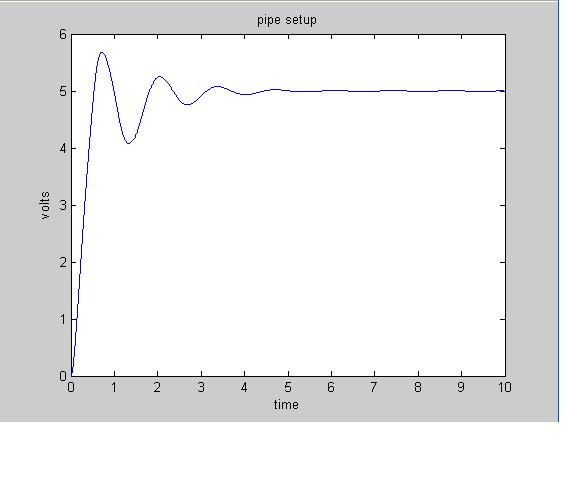
23 Setting i=0 and j=0 and k=0 gives - A X 2 + B Y + Z KP Cos[ T] = 0 A Y + B X - Z KP Sin[ T] = 0 B Y Ro - B Do - Z KP Co + Z KP Ro = 0 Manipulation of the first two equations gives KP = [A X 2 - B Y] / [Z Cos[ T]] KP = [A Y + B X ] / [Z Sin[ T]] Sin[ T]/Cos[ T] = Tan[ T] = [A Y + B X ] / [A X 2 - B Y] The last equation gives. Once is known we can then solve for KP. For the illustration, we let: X=0.25 Y=1.0 A=0.1 B=1.0 Z=1.0 T=0.5. The above equations give =3.97, KP=1.5 and TP=1.58. Substitution into the Ziegler Nichols gains equations gives: KP=0.9; KI=1.2; KD=0.17. An m code for the setup is given below. This is followed by a Ziegler Nichols response. A SIMULINK Block diagram follows the response. It gives basically the same response as the code.
24
25
26
27 COMPUTER SIMULATION OF CONTROL SYSTEMS PREAMBLE Simulation allows one to study the behavior of a system before it is actually constructed. This can serve as an aid to system design. Simulations are inexpensive and easy to put together. They can handle all sorts of phenomena. These include transport lag and computer loop rate phenomena. Simulations can also handle multiple strong nonlinearities. They are often used as a check on more conventional analysis. However, simulations are like experiments. For complex systems, it is hard to make sense of responses. Before digital computers were developed, systems were simulated using analog electronics. When digital computers became common place, simulations made use of time stepping procedures. Basically, these follow local slopes or rates step by step in time. Special software packages based on these procedures have been developed. Probably, the popular package is SIMULINK under MATLAB.
28 AUTONOMOUS UNDERWATER VEHICLE TIME STEPPING SIMULATION To illustrate time stepping we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. The governing equations are: M d 2 R/dt 2 = B + D - W W = X dr/dt dr/dt + Y dr/dt J db/dt + I B = Q Q = KP E + KI Edτ + KD de/dt E = C - R where R is the depth of the auv, M is its overall mass, B is the control force from the propulsion system, D is a disturbance load caused for example by sudden weight changes, W is a drag load consisting of wake drag and wall drag, E is the depth error, C is the command depth, M X Y J I are process constants and KP KI KD are the controller gains.
29 Manipulation of the governing equations gives dr/dt = U du/dt = (B + D - W) / M W = X U U + Y U db/dt = (Q - I B) / J Q = KP E + KI Edτ + KD de/dt E = C - R Application of time stepping gives RNEW = ROLD + t * UOLD UNEW = UOLD + t * (BOLD + DOLD - WOLD) /M WOLD = X UOLD UOLD + Y UOLD BNEW = BOLD + t * (QOLD - I BOLD) / J QOLD = KP EOLD + KI EOLD t + KD EOLD/ t EOLD = COLD - ROLD An m code for the auv is given below. This is followed by a Ziegler Nichols response generated by the code.
30
31
32 PIPE FLOW SETUP TIME STEPPING SIMULATION To illustrate time stepping we will consider the task of controlling the temperature of air flowing down a pipe. The setup is shown on the next page. The governing equations are: X dr/dt + Y R = H + D A dh/dt + B H = Z Q Q = KP E + KI Edτ + KD de/dt E = C - R where R is the temperature of the air at the heater, R is the temperature of the air at the sensor, C is the command temperature, E is the temperature error, Q is the control signal, H is the heat generated by the heater, D is a disturbance heat (plus or minus), X Y A B Z are process constants and KP KI KD are the controller gains. Note that R is what R was T seconds back in time: T is the time it takes for the air to travel down the pipe.
33
34 Manipulation of the governing equations gives dr/dt = (H + D - Y R) / X dh/dt = (Z Q - B H) / A Q = KP E + KI Edτ + KD de/dt E = C - R Application of time stepping gives RNEW = ROLD + t * (HOLD + DOLD - Y ROLD) / X HNEW = HOLD + t * (Z QOLD - B HOLD) / A QOLD = KP EOLD + KI EOLD t + KD EOLD/ t EOLD = COLD - ROLD An m code for the setup is given below. This is followed by a Ziegler Nichols response generated by the code.
35
36
37 SIMULINK CONTROL SYSTEM SIMULATION SIMULINK makes use of a block diagram representation of the system. One activates SIMULINK by typing SIMULINK and pressing enter in the main MATLAB window. Blocks are formed by picking blocks from groups of blocks in the main SIMULINK window. The group labeled SOURCES contains blocks that could be used for commands and disturbances. The group labeled SINKS contains blocks that could be used for display of responses. The group labeled CONTINUOUS contains many common transfer functions and state space blocks. The group labeled DISCRETE contains blocks that could be used to mimic loop rate phenomena. The group labeled MATH contains blocks for things like summation junctions and gains. The group labeled NONLINEAR contains various types of nonlinearities and switching controllers. Many of the switching controllers can be formed using LOOK UP TABLE under the group of blocks labeled FUNCTIONS & TABLES. The PID controller can be found under ADDITIONAL LINEAR under SIMULINK EXTRAS under BLOCK SETS & TOOL BOXES.
38 Block diagram construction makes extensive use of the click and drag functions of the left and right buttons of the mouse. To illustrate the construction, imagine you have an empty MINE window open on the screen. From the SIMULINK window, double left click on the SOURCES icon. Then, from its window, left click on the STEP block and drag it to the MINE window. All other blocks can be moved this way. You can also use COPY and PASTE. To move blocks around in the MINE window, just left click and drag them. You can also use CUT and PASTE. To join blocks with lines, you again use left click and drag. To create break lines, you use right click on the break point and drag. To change parameters, double left click on the block to activate a block menu. To run a simulation, first pick PARAMETERS under SIMULATION to set things like ODE integration scheme. Then, pick START under SIMULATION to run the simulation. SIMULINK block diagrams for AUV Depth Control and Pipe Flow Temperature Control are attached. Also attached are Ziegler Nichols responses of each system to a step in command.
39 AUTONOMOUS UNDERWATER VEHICLE To illustrate SIMULINK we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. The governing equations are: M d 2 R/dt 2 + N dr/dt = B + D J db/dt + I B = Q Q = KP E + KI Edτ + KD de/dt E = C - R Laplace transformation gives [ M S 2 + N S ] R = B + D [ J S + I ] B = Q Q = [KP + KI/S + KD S ] E Transfer functions are R / [ B + D ] = 1 / [ M S 2 + N S ] B / Q = 1 / [ J S + I ] Q / E = [KP + KI/S + KD S ]
40
41
42 PIPE FLOW SETUP To illustrate SIMULINK we will consider the task of controlling the temperature of air flowing down a pipe. The governing equations are: X dr/dt + Y R = H + D A dh/dt + B H = Z Q Q = KP E + KI Edτ + KD de/dt E = C - R Laplace transformation gives [ X S + Y ] R = H + D [ A S + B ] H = Z Q Q = [KP + KI/S + KD S ] E E = C - R R = e -TS R Transfer functions are R / [ H + D ] = 1 / [ X S + Y ] H / Q = Z / [ A S + B ] Q / E = [KP + KI/S + KD S ] E = C - R R / R = e -TS
43
44
45 CONTROL SYSTEM STABILITY The standard form block diagram is This gives the transfer function O / I = G / [1 + GH] A unit impulse jars a system from a rest state and the motion thereafter is nonforced. It is a good input to test stability. For a unit impulse input I=1 and the response becomes
46 O = H = G / [1 + GH] = N / D where N and D are polynomials. The characteristic equation is D=0. Partial Fraction Expansion (PFE) gives O = / [S - ] where each is a root of the characteristic equation. Inverse Laplace Transformation (ILT) gives O = e + t The G and H transfer functions can be written as G = A/B H=X/Y GH = A/B X/Y = AX/BY = N/D where A B X Y N D are polynomials. In this case O = G / [1+GH] = A/B / [1+A/B X/Y] = AY / [BY + AX] = N / D
47 This shows that D = N + D The [1+GH] function is: 1 + GH = 1+ N/D = [N+D] / D = D / D Setting D equal to 0 gives the overall characteristic equation. Setting D equal to 0 gives the characteristic equation for the sub systems. The [1+GH] function can be factored to give: π [S-Z] / π [S-P] where the symbol π indicates product. Zeros Z are values of S which make [1+GH] zero. Poles P are values of S which make [1+GH] infinite. Note that each [S-Z] factor is basically a vector with its origin at Z. Similarly each [S-P] factor is basically a vector with its origin at P.
48 NYQUIST CONCEPT The Nyquist Concept starts by surrounding the entire unstable half of the S plane with a clockwise contour. The [1+GH] function is basically a vector made from zero and pole factors which are also vectors: π [S-Z] / π [S-P] = R Θ When the tip of the S vector moves clockwise around the Nyquist contour, zeros Z inside it cause clockwise rotations of [1+GH] while poles P inside it cause counter clockwise rotations. Only zeros and poles inside cause such rotations: zeros and poles outside only cause [1+GH] to nod up and down. The sketches on the next page show a complex conjugate pair of roots inside the Nyquist contour and the corresponding [1+GH] plot. As can be seen, the [1+GH] vector rotates twice clockwise as the tip of the S vector moves clockwise around the Nyquist contour. These clockwise rotations are caused by the two unstable zeros inside the contour. Subtracting one from [1+GH] and its origin gives GH and minus one. One can use a GH plot with a radius drawn from minus one to determine rotations.
49
50
51 ROOT LOCUS CONCEPT When S is a Z or root of the overall characteristic equation, [1+GH] is equal to zero. This implies that GH is equal to minus unity: GH = -1. This means its magnitude is unity and its angle is plus or minus 180 degrees. So any S which satisfies these constraints is a root of the overall characteristic equation. To determine borderline proportional gain and period the angle constraint is used to determine the period and the magnitude constraint is used to determine the gain. Consider the GH function GH = K X [ (S-v) (S-w) ] / [ (S-a) (S-b) (S-c) ] Its poles and zeros are shown in the sketch. The location of the square point in the sketch is adjusted to satisfy the angle constraint: α + β - ε - κ - σ = ±180 The magnitude constraint requires that K [X V W] / [A B C] = 1 where the lengths V W A B C can be measured. Manipulation gives K = [A B C] / [X V W]
52
53 CONTROL SYSTEM DESIGN STABILITY MARGINS The degree of stability of a control system depends on how close the GH plot is to the minus one point. Two measures of closeness are the gain margin GM and the phase margin PM. Engineering experience suggests that GM should be at least 2 and PM should be at least 30 o. WEDGE CIRCLE REGION Most systems have a dominant pair of roots which control how stable it is. Theory shows that the damping factor associated with these roots is constant along radial lines drawn from the origin in the S plane while the undamped natural frequency is constant along semi circles with center at the origin of the S plane. The wedge circle region is where roots should be located to get good damping and speed of response.
54
55
56 OVERVIEW OF NYQUIST The Nyquist procedure is based on the 1+GH function: 1 + GH = 1 + N/D = (N+D)/D = D/D Γ (S-Z 1 ) (S-Z 2 ) ::::: (S-Z n ) = = R Θ (S-P 1 ) (S-P 2 ) ::::: (S-P m ) It is basically a vector made from zero and pole factors which are also vectors. When the tip of the S vector moves clockwise around the Nyquist contour, zeros Z inside it cause clockwise rotations of 1+GH while poles P inside it cause counterclockwise rotations. Only zeros and poles inside cause such rotations: zeros and poles outside only cause 1+GH to nod up and down. In the 1+GH plane R is drawn from the origin. In the GH plane, R is drawn from the minus one point. We want to find the number of unstable zeros N Z. From the GH plot, one gets the net clockwise rotations of the GH vector N. The net clockwise rotations N must be equal to the number of unstable zeros N Z minus the number of unstable poles N P. From the GH function, one gets the number of unstable poles N P. Manipulation gives N Z : N = N Z - N P N Z = N + N P
57
58
59 NYQUIST ILLUSTRATION Consider the case where there two unstable zeros in the right half of the S plane and all other zeros and poles are far into the left half of the S plane. Now surround the unstable zeros by a clockwise contour as shown on the next page. When we map points on this contour to the 1+GH plane, we get the contour two pages over. When we draw a vector with radius R and angle to the contour in the 1+GH plane and count the number of times it rotates clockwise as we move around the contour in the S plane, we get two clockwise rotations. These rotations are caused by the unstable zeros. Nyquist allows us to determine the number of unstable zeros without having to find their exact locations.
60
61
62 SIGNIFICANCE OF GH EQUAL TO MINUS ONE Consider the case where only proportional control is being used and the GH plot passes through the minus one point in the GH plane. If GH=-1 then 1+GH=0. This implies that at this point S=Z: in other words, it is a root of the overall characteristic equation. But along the GH plot S=±jω. So Z=±jω. So there is a complex conjugate pair of roots of the overall characteristic equation on the imaginary axis in the S plane. This means the system is borderline stable and the gain K is the borderline stable gain K and the frequency ω is the borderline stable frequency ω. The borderline stable period is T=2Π/ω.
63
64 OPEN LOOP FREQUENCY RESPONSE A GH plot is basically a polar open loop frequency response plot. Consider the case where only proportional control is being used. When GH=-1, a command sine wave produces a response which has the same magnitude as the command but is 180 o out of phase. If the command was suddenly removed and the loop was suddenly closed, the negative of the response would take the place of the command and keep the system oscillating. The system would be borderline stable with gain K. If the gain was bigger than K, the command would produce a response bigger than itself. When this takes over, it would produce growing or unstable oscillations. If the gain was smaller than K, the command would produce a response smaller than itself. When this takes over, it would produce decaying or stable oscillations.
65
66 AUTONOMOUS UNDERWATER VEHICLE NYQUIST APPLICATION To illustrate application of the Nyquist Procedure we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. The equations governing the motion of the auv are: M d 2 R/dt 2 + N dr/dt = B + D J db/dt + I B = Q Q = KP E E = C - R Laplace Transformation of the governing equations gives (M S 2 + N S) R = B + D (J S + I) B = Q Q = KP E E = C - R The GH function for the auv is: KP / [ (M S 2 + N S) (J S + I) ] To give a numerical example we will let the parameters be: M = 50.0 N = 50.0 J = 0.5 I = 0.1 In this case the GH function reduces to GH = KP / [ (50.0 S S) (0.5 S + 0.1) ] = KP / [25.0 S S S]
67 Letting S=j this can be written as: GH = KP / [ j j] As tends to 0 GH tends to - j while as tends to it tends to +0j. There is a real axis crossover when 2 =5/25=1/5. With this 2 the term in square brackets reduces to -30/5 or -6. This implies that the borderline stable gain KP which makes the crossover GH=-1 is 6. The matlab GH plot for the borderline case is given below.
68 PIPE FLOW SETUP NYQUIST APPLICATION To illustrate application of the Nyquist Procedure we will consider the task of controlling the temperature of air flowing down a pipe. The governing equations are: X dr/dt + Y R = H + D H = Z Q Q = KP E E = C - R Laplace Transformation of the governing equations gives (X S + Y) R = H + D H = Z Q E = C - R Q = KP E R = e -TS R The GH function for the setup is: KP Z e [-TS] / (X S + Y) To give a numerical example we will let the parameters be: X = 0.25 Y = 1.0 Z = 1.0 T = 0.5 In this case the GH function reduces to: GH = KP e [-0.5S] / (0.25 S + 1.0) Letting S=j this can be written as:
![GH = KP [Cos(0.5 ) j Sin(0.5 )] / (0.25 j + 1.0) = KP [P + Q j] / W where P = - 0.25 Sin(0.5 ) + Cos(0.5 ) Q = - 0.25 Cos(0.5 ) - Sin(0.5 ) W = (0.25 ) 2 + 1.](/docs-images/93/113234612/images/69-0.jpg "0 As tends to 0 GH tends to KP while as tends to it tends to 0. Real axis crossovers occur when Q is equal to 0. Iteration shows that the first crossover occurs when =4.58. This gives P/W=-0.66.")
69 GH = KP [Cos(0.5 ) j Sin(0.5 )] / (0.25 j + 1.0) = KP [P + Q j] / W where P = Sin(0.5 ) + Cos(0.5 ) Q = Cos(0.5 ) - Sin(0.5 ) W = (0.25 ) As tends to 0 GH tends to KP while as tends to it tends to 0. Real axis crossovers occur when Q is equal to 0. Iteration shows that the first crossover occurs when =4.58. This gives P/W= This implies that the borderline stable gain KP which makes the crossover GH=-1 is The matlab GH plot for the borderline case is given below.
70 NONLINEAR PHENOMENA Linear theory predicts that, when an unstable system is disturbed from a rest state, the transients which develop grow indefinitely. For example, when transients are oscillatory, the oscillation amplitude tends to as time tends to. In reality, infinite amplitudes are never observed. Sometimes large amplitudes cause the system to break down. Often nonlinearities limit amplitudes to some finite level before breakdown can occur. These finite amplitude oscillations are known as limit cycles. Sometimes limit cycle amplitudes are very small: in this case, system is often considered to be practically stable. Nonlinearities can also cause systems which are stable in a linear sense to be practically unstable. When a system has strong multiple nonlinearities, simulation is the only option. When a system has only one strong nonlinearity, such as a switching controller, one can use its Describing Function DF. In some texts, the letter N is used to denote it instead of DF. The DF replaces the nonlinear controller.
71 When a system with a nonlinear controller is undergoing a limit cycle, its behavior resembles a borderline stable linear system: no growth or decay. The controller seems to be able to adjust its gain to make the system borderline stable. The describing function DF for a nonlinear controller approximates this adjustable gain. To get DF, the system is assumed to be undergoing a limit cycle and to be nonforced. Also the signal fedback to the controller is taken to be a pure sinusoid. This is usually a good assumption because the linear elements which follow the controller generally act as a low pass filter: they let only the fundamental component out of the controller get back to the controller. When the input into the nonlinear controller is: IN = Eo Sinωt its output is generally of the form: ON = OB + OS Sinωt + OC Cosωt + Higher Harmonics. With the same input:
72 IDF = Eo Sinωt the describing function gives out: ODF = OB + OS Sinωt + OC Cosωt. So a describing function analysis ignores higher harmonics. This is appropriate because they are filtered away anyhow. For most control situations, the bias term OB is zero. When a system is undergoing a limit cycle, its linear elements are forced sinusoidally by the limit cycle. In this case, each transfer function reduces to the form: where O/I = TF = A + Bj I = Sinωt O = A Sinωt + B Cosωt. By analogy, the DF for a nonlinear controller is: where ODF / IDF = DF = OS/Eo + OC/Eo j
73 IDF = Eo Sinωt ODF = OS Sinωt + OC Cosωt. As an illustration of the development of a describing function, consider the ideal relay controller. When it has a sinusoidal input, its output is a square wave. A Fourier Series analysis of a square wave gives the components: T OS = 2/T Q(t) Sin t dt = 4Qo/ 0 T OC = 2/T Q(t) Cos t dt = 0 0 T OB = 2/T Q(t) dt = 0 0 So the fundamental output is: ODF = [4Qo/ ] Sinωt The input is IDF = Eo Sinωt So the Describing Function is DF = [4Qo]/[ Eo]
74 RELAY CONTROLLERS AUTONOMOUS UNDERWATER VEHICLE To illustrate nonlinear phenomena, we will consider the task of controlling the submergence depth of a small autonomous underwater vehicle or auv. The schematic of the system is shown on the next page. Relay controllers resemble the proportional controller. For the proportional controller case, the governing equations for the auv are: M d 2 R/dt 2 = B + D - W W = X dr/dt dr/dt + Y dr/dt J db/dt + I B = Q Q = KP E E = C - R where R is the depth of the auv, M is its overall mass, B is the control force from the propulsion system, D is a disturbance load caused for example by sudden weight changes, W is a drag load consisting of wake drag and wall drag, E is the depth error, C is the command depth, M X Y J I are process constants and KP is the controller gain.
75
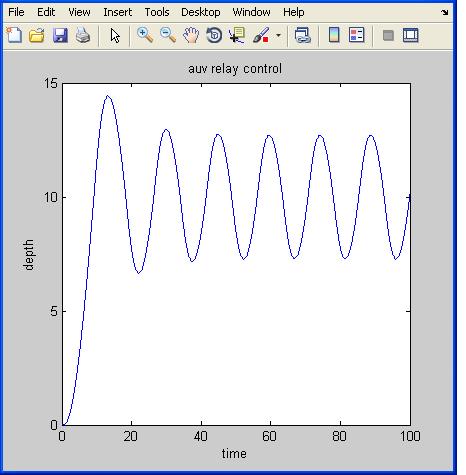
76 Linearization allows us to write W as: W = N dr/dt To give a numerical example we will let the parameters be: M = 50.0 N = 50.0 J = 0.5 I = 0.1 Theory shows that the borderline proportional gain KP for the auv is 6 and the borderline period TP is 14. The describing function for an ideal relay controller is: DF = [4 Qo] / [π Eo] At a limit cycle this is equal to the borderline proportional gain KP. Setting DF equal to KP gives: Eo = [4 Qo] / [π DF] = [4Qo] / [π KP] The saturation limit for the controller is 12. Substitution into the amplitude equation gives Eo equal to 2.5. An m code for the auv for the ideal relay controller case is given below. This is followed by a response generated by the code. As can be seen, it agrees with DF predictions.
77
78
79 PIPE FLOW SETUP To illustrate nonlinear phenomena, we will consider the task of controlling the temperature of air flowing down a pipe. The setup is shown on the next page. Relay controllers resemble the proportional controller. For the proportional controller case, the governing equations for the setup are: X dr/dt + Y R = H + D A dh/dt + B H = Z Q Q = KP E E = C - R where R is the temperature of the air at the heater, R is the temperature of the air at the sensor, C is the command temperature, E is the temperature error, Q is the control signal, H is the heat generated by the heater, D is a disturbance heat (plus or minus), X Y A B Z are process constants and KP is the controller gain. Note that R is what R was T seconds back in time: T is the time it takes for the air to travel down the pipe.
80
81 To give a numerical example we will let the parameters be: X = 0.25 Y = 1.0 A = 0.1 B = 1.0 Z = 1.0 T = 0.5 Theory shows that the borderline proportional gain KP for the setup is 1.5 and the borderline period TP is The describing function for an ideal relay controller is: DF = [4 Qo] / [π Eo] At a limit cycle this is equal to the borderline proportional gain KP. Setting DF equal to KP gives: Eo = [4 Qo] / [π DF] = [4Qo] / [π KP] The saturation limit for the controller is 5. Substitution into the amplitude equation gives Eo equal to 4.2. An m code for the setup for the ideal relay controller case is given below. This is followed by a response generated by the code. As can be seen, it agrees with DF predictions.
82
83
ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED
![ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED](/thumbs/87/96043431.jpg "ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED") NAME: JOE CROW ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED GIVE CONCISE ANSWERS ASK NO
NAME: JOE CROW ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED GIVE CONCISE ANSWERS ASK NO
ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED
![ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED](/thumbs/87/96043394.jpg "ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED") NAME: JOE CROW ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED GIVE CONCISE ANSWERS ASK NO
NAME: JOE CROW ENGINEERING 6951 AUTOMATIC CONTROL ENGINEERING FINAL EXAM FALL 2011 MARKS IN SQUARE [] BRACKETS INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED GIVE CONCISE ANSWERS ASK NO
EXPERIMENTAL METHODS SYSTEM QUESTION [70] The governing equations for rocket control are: A dt/dt = Q E = C R
![EXPERIMENTAL METHODS SYSTEM QUESTION [70] The governing equations for rocket control are: A dt/dt = Q E = C R](/thumbs/85/91701819.jpg "EXPERIMENTAL METHODS SYSTEM QUESTION [70] The governing equations for rocket control are: A dt/dt = Q E = C R") EXPERIMENTAL METHODS SYSTEM QUESTION [70] The governing equations for rocket control are: X d 2 R/dt 2 + Y dr/dt + Z R = T + M A dt/dt = Q Q = K P E + K I Edτ + K D de/dt E = C R where R is the actual
EXPERIMENTAL METHODS SYSTEM QUESTION [70] The governing equations for rocket control are: X d 2 R/dt 2 + Y dr/dt + Z R = T + M A dt/dt = Q Q = K P E + K I Edτ + K D de/dt E = C R where R is the actual
EXPERIMENTAL METHODS QUIZ #1 SYSTEM QUESTION. The equations governing the proportional control of the forward speed of a certain ship are:
 EXPERIMENTAL METHODS QUIZ #1 SYSTEM QUESTION The equations governing the proportional control of the forward speed of a certain ship are: Plant X dr/dt + Y R = P + D Drive J dp/dt + I P = Q Sensor A dw/dt
EXPERIMENTAL METHODS QUIZ #1 SYSTEM QUESTION The equations governing the proportional control of the forward speed of a certain ship are: Plant X dr/dt + Y R = P + D Drive J dp/dt + I P = Q Sensor A dw/dt
EE 422G - Signals and Systems Laboratory
 EE 4G - Signals and Systems Laboratory Lab 9 PID Control Kevin D. Donohue Department of Electrical and Computer Engineering University of Kentucky Lexington, KY 40506 April, 04 Objectives: Identify the
EE 4G - Signals and Systems Laboratory Lab 9 PID Control Kevin D. Donohue Department of Electrical and Computer Engineering University of Kentucky Lexington, KY 40506 April, 04 Objectives: Identify the
Bangladesh University of Engineering and Technology. EEE 402: Control System I Laboratory
 Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Lab 3: Model based Position Control of a Cart
 I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
CONTROL SYSTEM STABILITY. CHARACTERISTIC EQUATION: The overall transfer function for a. where A B X Y are polynomials. Substitution into the TF gives:
 CONTROL SYSTEM STABILITY CHARACTERISTIC EQUATION: The overall transfer function for a feedback control system is: TF = G / [1+GH]. The G and H functions can be put into the form: G(S) = A(S) / B(S) H(S)
CONTROL SYSTEM STABILITY CHARACTERISTIC EQUATION: The overall transfer function for a feedback control system is: TF = G / [1+GH]. The G and H functions can be put into the form: G(S) = A(S) / B(S) H(S)
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
Application Note #3413
 Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
6.1 Sketch the z-domain root locus and find the critical gain for the following systems K., the closed-loop characteristic equation is K + z 0.
 6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
Positioning Servo Design Example
 Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Control 2. Proportional and Integral control
 Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
EC CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING
 EC 2255 - CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING 1. What is meant by a system? It is an arrangement of physical components related in such a manner as to form an entire unit. 2. List the two types
EC 2255 - CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING 1. What is meant by a system? It is an arrangement of physical components related in such a manner as to form an entire unit. 2. List the two types
CYBER EXPLORATION LABORATORY EXPERIMENTS
 CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
Hands-on Lab. Damped Compound Pendulum System ID (Experimental and Simulation) L Bar length m d Pivot to CG distance m m Mass of pendulum kg
 L Bar length m d Pivot to CG distance m m Mass of pendulum kg") Hands-on Lab Damped Compound Pendulum System ID (Experimental and Simulation) Preamble: c d dt d L Bar length m d Pivot to CG distance m m Mass of pendulum kg L L m g L Sketched above is a damped compound
Hands-on Lab Damped Compound Pendulum System ID (Experimental and Simulation) Preamble: c d dt d L Bar length m d Pivot to CG distance m m Mass of pendulum kg L L m g L Sketched above is a damped compound
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Laboratory Exercise 1 DC servo
 Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Lab 11 - Free, Damped, and Forced Oscillations
 Lab 11 Free, Damped, and Forced Oscillations L11-1 Name Date Partners Lab 11 - Free, Damped, and Forced Oscillations OBJECTIVES To understand the free oscillations of a mass and spring. To understand how
Lab 11 Free, Damped, and Forced Oscillations L11-1 Name Date Partners Lab 11 - Free, Damped, and Forced Oscillations OBJECTIVES To understand the free oscillations of a mass and spring. To understand how
NAME: AUTOMATIC CONTROL ENGINEERING ENGINEERING 6951 FINAL EXAMINATION FALL 2014 INSTRUCTIONS
 NAME: AUTOMATIC CONTROL ENGINEERING ENGINEERING 6951 FINAL EXAMINATION FALL 2014 INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED NO ELECTRONIC DEVICES ALLOWED ASK NO QUESTIONS THIS EXAM HAS
NAME: AUTOMATIC CONTROL ENGINEERING ENGINEERING 6951 FINAL EXAMINATION FALL 2014 INSTRUCTIONS NO NOTES OR TEXTS ALLOWED NO CALCULATORS ALLOWED NO ELECTRONIC DEVICES ALLOWED ASK NO QUESTIONS THIS EXAM HAS
EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE (V_3)
") TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE (V_3) 121 Textbook Reference: Knight, Chapter 13.1-3, 6. SYNOPSIS In
TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE (V_3) 121 Textbook Reference: Knight, Chapter 13.1-3, 6. SYNOPSIS In
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Simple Harmonic Motion
 Introduction Simple Harmonic Motion The simple harmonic oscillator (a mass oscillating on a spring) is the most important system in physics. There are several reasons behind this remarkable claim: Any
Introduction Simple Harmonic Motion The simple harmonic oscillator (a mass oscillating on a spring) is the most important system in physics. There are several reasons behind this remarkable claim: Any
Stability of Feedback Control Systems: Absolute and Relative
 Stability of Feedback Control Systems: Absolute and Relative Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University Stability: Absolute and Relative
Stability of Feedback Control Systems: Absolute and Relative Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University Stability: Absolute and Relative
Mechatronics Engineering. Li Wen
 Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013
 Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
1 x(k +1)=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =
=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =") 567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
Lab 11 Simple Harmonic Motion A study of the kind of motion that results from the force applied to an object by a spring
 Lab 11 Simple Harmonic Motion A study of the kind of motion that results from the force applied to an object by a spring Print Your Name Print Your Partners' Names Instructions April 20, 2016 Before lab,
Lab 11 Simple Harmonic Motion A study of the kind of motion that results from the force applied to an object by a spring Print Your Name Print Your Partners' Names Instructions April 20, 2016 Before lab,
Simple Harmonic Motion
 Physics Topics Simple Harmonic Motion If necessary, review the following topics and relevant textbook sections from Serway / Jewett Physics for Scientists and Engineers, 9th Ed. Hooke s Law (Serway, Sec.
Physics Topics Simple Harmonic Motion If necessary, review the following topics and relevant textbook sections from Serway / Jewett Physics for Scientists and Engineers, 9th Ed. Hooke s Law (Serway, Sec.
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
 Final Exam (2011) solutions") MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
1 (20 pts) Nyquist Exercise
 Nyquist Exercise") EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION
 CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION Objectives Students should be able to: Draw the bode plots for first order and second order system. Determine the stability through the bode plots.
CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION Objectives Students should be able to: Draw the bode plots for first order and second order system. Determine the stability through the bode plots.
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
Course Summary. The course cannot be summarized in one lecture.
 Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Lab 1: Dynamic Simulation Using Simulink and Matlab
 Lab 1: Dynamic Simulation Using Simulink and Matlab Objectives In this lab you will learn how to use a program called Simulink to simulate dynamic systems. Simulink runs under Matlab and uses block diagrams
Lab 1: Dynamic Simulation Using Simulink and Matlab Objectives In this lab you will learn how to use a program called Simulink to simulate dynamic systems. Simulink runs under Matlab and uses block diagrams
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK
 ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
DC-motor PID control
 DC-motor PID control This version: November 1, 2017 REGLERTEKNIK Name: P-number: AUTOMATIC LINKÖPING CONTROL Date: Passed: Chapter 1 Introduction The purpose of this lab is to give an introduction to
DC-motor PID control This version: November 1, 2017 REGLERTEKNIK Name: P-number: AUTOMATIC LINKÖPING CONTROL Date: Passed: Chapter 1 Introduction The purpose of this lab is to give an introduction to
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593
 LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
H(s) = s. a 2. H eq (z) = z z. G(s) a 2. G(s) A B. s 2 s(s + a) 2 s(s a) G(s) 1 a 1 a. } = (z s 1)( z. e ) ) (z. (z 1)(z e at )(z e at )
 = s. a 2. H eq (z) = z z. G(s) a 2. G(s) A B. s 2 s(s + a) 2 s(s a) G(s) 1 a 1 a. } = (z s 1)( z. e ) ) (z. (z 1)(z e at )(z e at )") .7 Quiz Solutions Problem : a H(s) = s a a) Calculate the zero order hold equivalent H eq (z). H eq (z) = z z G(s) Z{ } s G(s) a Z{ } = Z{ s s(s a ) } G(s) A B Z{ } = Z{ + } s s(s + a) s(s a) G(s) a a
.7 Quiz Solutions Problem : a H(s) = s a a) Calculate the zero order hold equivalent H eq (z). H eq (z) = z z G(s) Z{ } s G(s) a Z{ } = Z{ s s(s a ) } G(s) A B Z{ } = Z{ + } s s(s + a) s(s a) G(s) a a
Multi Rotor Scalability
 Multi Rotor Scalability With the rapid growth in popularity of quad copters and drones in general, there has been a small group of enthusiasts who propose full scale quad copter designs (usable payload
Multi Rotor Scalability With the rapid growth in popularity of quad copters and drones in general, there has been a small group of enthusiasts who propose full scale quad copter designs (usable payload
LAB 2 - ONE DIMENSIONAL MOTION
 Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Table of Laplacetransform
 Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Massachusetts Institute of Technology Department of Mechanical Engineering Dynamics and Control II Design Project
 Massachusetts Institute of Technology Department of Mechanical Engineering.4 Dynamics and Control II Design Project ACTIVE DAMPING OF TALL BUILDING VIBRATIONS: CONTINUED Franz Hover, 5 November 7 Review
Massachusetts Institute of Technology Department of Mechanical Engineering.4 Dynamics and Control II Design Project ACTIVE DAMPING OF TALL BUILDING VIBRATIONS: CONTINUED Franz Hover, 5 November 7 Review
Thursday, August 4, 2011
 Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
Active Control? Contact : Website : Teaching
 Active Control? Contact : bmokrani@ulb.ac.be Website : http://scmero.ulb.ac.be Teaching Active Control? Disturbances System Measurement Control Controler. Regulator.,,, Aims of an Active Control Disturbances
Active Control? Contact : bmokrani@ulb.ac.be Website : http://scmero.ulb.ac.be Teaching Active Control? Disturbances System Measurement Control Controler. Regulator.,,, Aims of an Active Control Disturbances
Lab 5: Harmonic Oscillations and Damping
 Introduction Lab 5: Harmonic Oscillations and Damping In this lab, you will explore the oscillations of a mass-spring system, with and without damping. You'll get to see how changing various parameters
Introduction Lab 5: Harmonic Oscillations and Damping In this lab, you will explore the oscillations of a mass-spring system, with and without damping. You'll get to see how changing various parameters
Digital Control: Summary # 7
 Digital Control: Summary # 7 Proportional, integral and derivative control where K i is controller parameter (gain). It defines the ratio of the control change to the control error. Note that e(k) 0 u(k)
Digital Control: Summary # 7 Proportional, integral and derivative control where K i is controller parameter (gain). It defines the ratio of the control change to the control error. Note that e(k) 0 u(k)
(Refer Slide Time 1:25)
") Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 2 Lecture - 24 Transient Response of Pressure Transducers
Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 2 Lecture - 24 Transient Response of Pressure Transducers
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
Chapter 15 Periodic Motion
 Chapter 15 Periodic Motion Slide 1-1 Chapter 15 Periodic Motion Concepts Slide 1-2 Section 15.1: Periodic motion and energy Section Goals You will learn to Define the concepts of periodic motion, vibration,
Chapter 15 Periodic Motion Slide 1-1 Chapter 15 Periodic Motion Concepts Slide 1-2 Section 15.1: Periodic motion and energy Section Goals You will learn to Define the concepts of periodic motion, vibration,
ROOT LOCUS. Consider the system. Root locus presents the poles of the closed-loop system when the gain K changes from 0 to. H(s) H ( s) = ( s)
 H ( s) = ( s)") C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
Frequency Response Techniques
 4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
Homework 2: Kinematics and Dynamics of Particles Due Friday Feb 12, Pressurized tank
 EN40: Dynamics and Vibrations Homework 2: Kinematics and Dynamics of Particles Due Friday Feb 12, 2016 School of Engineering Brown University 1. The figure illustrates an idealized model of a gas gun (used,
EN40: Dynamics and Vibrations Homework 2: Kinematics and Dynamics of Particles Due Friday Feb 12, 2016 School of Engineering Brown University 1. The figure illustrates an idealized model of a gas gun (used,
Chapter 1, Section 1.2, Example 9 (page 13) and Exercise 29 (page 15). Use the Uniqueness Tool. Select the option ẋ = x
 and Exercise 29 (page 15). Use the Uniqueness Tool. Select the option ẋ = x") Use of Tools from Interactive Differential Equations with the texts Fundamentals of Differential Equations, 5th edition and Fundamentals of Differential Equations and Boundary Value Problems, 3rd edition
Use of Tools from Interactive Differential Equations with the texts Fundamentals of Differential Equations, 5th edition and Fundamentals of Differential Equations and Boundary Value Problems, 3rd edition
(1) (3)
 (3)") 1. This question is about momentum, energy and power. (a) In his Principia Mathematica Newton expressed his third law of motion as to every action there is always opposed an equal reaction. State what
1. This question is about momentum, energy and power. (a) In his Principia Mathematica Newton expressed his third law of motion as to every action there is always opposed an equal reaction. State what
Chapter 8 Rotational Motion
 Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Lecture 17 Date:
 Lecture 17 Date: 27.10.2016 Feedback and Properties, Types of Feedback Amplifier Stability Gain and Phase Margin Modification Elements of Feedback System: (a) The feed forward amplifier [H(s)] ; (b) A
Lecture 17 Date: 27.10.2016 Feedback and Properties, Types of Feedback Amplifier Stability Gain and Phase Margin Modification Elements of Feedback System: (a) The feed forward amplifier [H(s)] ; (b) A
Simulink Modeling Tutorial
 Simulink Modeling Tutorial Train system Free body diagram and Newton's law Model Construction Running the Model Obtaining MATLAB Model In Simulink, it is very straightforward to represent a physical system
Simulink Modeling Tutorial Train system Free body diagram and Newton's law Model Construction Running the Model Obtaining MATLAB Model In Simulink, it is very straightforward to represent a physical system
Part I. Two Force-ometers : The Spring Scale and The Force Probe
 Team Force and Motion In previous labs, you used a motion detector to measure the position, velocity, and acceleration of moving objects. You were not concerned about the mechanism that got the object
Team Force and Motion In previous labs, you used a motion detector to measure the position, velocity, and acceleration of moving objects. You were not concerned about the mechanism that got the object
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
Theory and Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati
 Theory and Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 7 Instability in Rotor Systems Lecture - 2 Fluid-Film Bearings
Theory and Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 7 Instability in Rotor Systems Lecture - 2 Fluid-Film Bearings
Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity?
 Lab Exercise: Gravity (Report) Your Name & Your Lab Partner s Name Due Date Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity? 2. What are several advantage of
Lab Exercise: Gravity (Report) Your Name & Your Lab Partner s Name Due Date Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity? 2. What are several advantage of
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
Forces and Newton s Second Law
 Forces and Newton s Second Law Goals and Introduction Newton s laws of motion describe several possible effects of forces acting upon objects. In particular, Newton s second law of motion says that when
Forces and Newton s Second Law Goals and Introduction Newton s laws of motion describe several possible effects of forces acting upon objects. In particular, Newton s second law of motion says that when
Automatic Control (TSRT15): Lecture 7
: Lecture 7") Automatic Control (TSRT15): Lecture 7 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Outline 2 Feedforward
Automatic Control (TSRT15): Lecture 7 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Outline 2 Feedforward
Answers to multiple choice questions
 Answers to multiple choice questions Chapter 2 M2.1 (b) M2.2 (a) M2.3 (d) M2.4 (b) M2.5 (a) M2.6 (b) M2.7 (b) M2.8 (c) M2.9 (a) M2.10 (b) Chapter 3 M3.1 (b) M3.2 (d) M3.3 (d) M3.4 (d) M3.5 (c) M3.6 (c)
Answers to multiple choice questions Chapter 2 M2.1 (b) M2.2 (a) M2.3 (d) M2.4 (b) M2.5 (a) M2.6 (b) M2.7 (b) M2.8 (c) M2.9 (a) M2.10 (b) Chapter 3 M3.1 (b) M3.2 (d) M3.3 (d) M3.4 (d) M3.5 (c) M3.6 (c)
Stabilizing the dual inverted pendulum
 Stabilizing the dual inverted pendulum Taylor W. Barton Massachusetts Institute of Technology, Cambridge, MA 02139 USA (e-mail: tbarton@mit.edu) Abstract: A classical control approach to stabilizing a
Stabilizing the dual inverted pendulum Taylor W. Barton Massachusetts Institute of Technology, Cambridge, MA 02139 USA (e-mail: tbarton@mit.edu) Abstract: A classical control approach to stabilizing a
Driven Harmonic Oscillator
 Driven Harmonic Oscillator Physics 6B Lab Experiment 1 APPARATUS Computer and interface Mechanical vibrator and spring holder Stands, etc. to hold vibrator Motion sensor C-209 spring Weight holder and
Driven Harmonic Oscillator Physics 6B Lab Experiment 1 APPARATUS Computer and interface Mechanical vibrator and spring holder Stands, etc. to hold vibrator Motion sensor C-209 spring Weight holder and
4. Complex Oscillations
 4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual
 Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
The Damped Pendulum. Physics 211 Lab 3 3/18/2016
 PHYS11 Lab 3 Physics 11 Lab 3 3/18/16 Objective The objective of this lab is to record the angular position of the pendulum vs. time with and without damping. The data is then analyzed and compared to
PHYS11 Lab 3 Physics 11 Lab 3 3/18/16 Objective The objective of this lab is to record the angular position of the pendulum vs. time with and without damping. The data is then analyzed and compared to
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
Lab 11. Spring-Mass Oscillations
 Lab 11. Spring-Mass Oscillations Goals To determine experimentally whether the supplied spring obeys Hooke s law, and if so, to calculate its spring constant. To find a solution to the differential equation
Lab 11. Spring-Mass Oscillations Goals To determine experimentally whether the supplied spring obeys Hooke s law, and if so, to calculate its spring constant. To find a solution to the differential equation
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.01T Fall Term 2004 Experiment 06: Work, Energy and the Harmonic Oscillator Purpose of the Experiment: In this experiment you allow a cart
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.01T Fall Term 2004 Experiment 06: Work, Energy and the Harmonic Oscillator Purpose of the Experiment: In this experiment you allow a cart
AN INTRODUCTION TO THE CONTROL THEORY
 Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
Mechanical Resonance and Chaos
 Mechanical Resonance and Chaos You will use the apparatus in Figure 1 to investigate regimes of increasing complexity. Figure 1. The rotary pendulum (from DeSerio, www.phys.ufl.edu/courses/phy483l/group_iv/chaos/chaos.pdf).
Mechanical Resonance and Chaos You will use the apparatus in Figure 1 to investigate regimes of increasing complexity. Figure 1. The rotary pendulum (from DeSerio, www.phys.ufl.edu/courses/phy483l/group_iv/chaos/chaos.pdf).
Control of Electromechanical Systems
 Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Lab Partner(s) TA Initials (on completion) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE
 TA Initials (on completion) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE") TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE 117 Textbook Reference: Walker, Chapter 10-1,2, Chapter 11-1,3 SYNOPSIS
TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE 117 Textbook Reference: Walker, Chapter 10-1,2, Chapter 11-1,3 SYNOPSIS
Rotational Dynamics. Goals and Introduction
 Rotational Dynamics Goals and Introduction In translational dynamics, we use the quantities displacement, velocity, acceleration, mass and force to model the motion of objects. In that model, a net force
Rotational Dynamics Goals and Introduction In translational dynamics, we use the quantities displacement, velocity, acceleration, mass and force to model the motion of objects. In that model, a net force
MAE 143B - Homework 9
 MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
PreLab 2 - Simple Harmonic Motion: Pendulum (adapted from PASCO- PS-2826 Manual)
") Musical Acoustics Lab, C. Bertulani, 2012 PreLab 2 - Simple Harmonic Motion: Pendulum (adapted from PASCO- PS-2826 Manual) A body is said to be in a position of stable equilibrium if, after displacement
Musical Acoustics Lab, C. Bertulani, 2012 PreLab 2 - Simple Harmonic Motion: Pendulum (adapted from PASCO- PS-2826 Manual) A body is said to be in a position of stable equilibrium if, after displacement
Lecture 6: Control Problems and Solutions. CS 344R: Robotics Benjamin Kuipers
 Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module - 3 Lecture - 3 Balancing Machines and Field Balancing of Rotating Discs We
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module - 3 Lecture - 3 Balancing Machines and Field Balancing of Rotating Discs We
Physics 2A Chapter 4: Forces and Newton s Laws of Motion
 Physics 2A Chapter 4: Forces and Newton s Laws of Motion There is nothing either good or bad, but thinking makes it so. William Shakespeare It s not what happens to you that determines how far you will
Physics 2A Chapter 4: Forces and Newton s Laws of Motion There is nothing either good or bad, but thinking makes it so. William Shakespeare It s not what happens to you that determines how far you will
Cascade Control of a Continuous Stirred Tank Reactor (CSTR)
") Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Experiment 7 : Newton's Third Law
 Experiment 7 : Newton's Third Law To every action there is always opposed an equal reaction, or the mutual actions of two bodies upon each other are always equal, and directed to contrary parts. If you
Experiment 7 : Newton's Third Law To every action there is always opposed an equal reaction, or the mutual actions of two bodies upon each other are always equal, and directed to contrary parts. If you
1 An Overview and Brief History of Feedback Control 1. 2 Dynamic Models 23. Contents. Preface. xiii
 Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System