Methodology of modelling the flexural-torsional vibrations in transient states of the rotating power transmission systems
|
|
|
- Job Brett Cole
- 5 years ago
- Views:
Transcription
1 Methodology of modelling the flexural-torsional vibrations in transient states of the rotating power transmission systems Tomasz Matyja Faculty of Transport Department of Logistics and Aviation Technologies



2 Rotating power transmission systems Turbochargers Ship shaft line Helicopter drive system Much more Dynamic behaviors investigated by methods of Rotordynamics
3 Plan of presentation Motivation for research and work Model of rigid rotor with six degrees of freedom Decoupling equations of the rotor motion Proposed decomposition method of the typical rotating system Simulink library for modeling and simulation of dynamic phenomena in rotating power transmission systems Examples of simulation studies Conclusions 3
4 Motivation for research and work Due: - the use of new materials (eg composites), - lightest and less stiffness shafts, - higher speeds. More important are: - non-linear nature of dynamic phenomena in rotating systems, - couplings between different forms of vibration: flexular, torsional and longitudinal, - transient analysis. 4
5 Methods used in the Rotordynamics Transfer Matrix Method [Prohl] Old method, flexural vibration of linear systems Finite Element Method D Timoshenko beam elements and rigid rotors D axisymmetric elements 3D volume elements Allows to considering couplings Typically flexural vibration only The dynamics of rotating systems is so different from the dynamics of the structure that specialized software is necessary. 5
6 Software used in Rotordynamics There has now been a lot of rotodynamics computer software, both academic and commercial. DYNROT (FEM, MATLAB) [Genta: Dynamics of Rotating Systems. 005] MESWIR [Kiciński: Rotor Dynamics. 005] ANSYS [Rotordynamics with ANSYS Mechanical Solutions.009] MSC NASTRAN [Rotordynamics user s guide,06] DyRoBeS [Chen W.J.: Introduction to Dynamics of Rotor- Bearing Systems] XLRotor [Vance J., Zeidan F., Murphy B.: Machinery Vibration and Rotordynamics] academic commercial 6
7 Motivation for research and work Existing methods of modelling the rotating system and available software not always allow to study coupled vibrations in transient states. Or Simulations of this type are very time-consuming, due to numerical integration of the equations of motion and a large number of degrees of freedom. Hence the idea of building own tools for modeling rotating systems 7
8 Model of rigid rotor with six degrees (ξ, η, ζ) movable coordinate system of freedom C is a geometrical center of a rotor three translational coordinates x c, y c, z c three rotational coordinates {ψ,θ,φ} Angles {ψ,θ} describe inclination of a rotor s plane and must be small. 8 Rotation angle φ connected with the axis ζ may have arbitrary values.
9 Selection of Euler angles (Rot --3) allows to avoid the gimbal lock Transformation matrix R = cosθcosφ sinψsinθcosφ + cosψsinφ cosψsinθcosφ + sinψsinφ = cosθsinφ sinψsinθsinφ + cosψcosφ cosψsinθsinφ + sinψcosφ sinθ sinψcosθ cosψcosθ. lock if θ π R θ= π = 0 sin ψ + φ cos ψ + φ 0 cos ψ + φ sin ψ + φ
10 Static and dynamic unbalance eccentricity e, β δ - inclining angle of principal axes γ- precede angle of principal axes, C - geometrical center P - rotor s mass center 0
11 Inertia matrix of the rotor in the system of principal axes J 3 J = J t J t J p Axisymmetric rotor in local moving frame J ξηζ J t + J p J t cos γ sin δ J p J t sinγcosγ sin δ J p J t cosγsinδcosδ = J p J t sinγcosγ sin δ J t + J p J t sin γ sin δ J p J t sinγsinδcosδ J p J t cosγsinδcosδ J p J t sinγsinδcosδ J p J p J t sin δ More general case J ξηζ = J J J 3 J J J 3 J 3 J 3 J 33
12 Lagrange equations of rotor motion Mass matrix, generalized coordinates, generalized forces, velocities vector M = m m m J J J 3 J J J 3 J 3 J 3 J 33, q = x C y C z C ψ θ φ, Q = Q xc Q yc Q zc Q ψ Q θ Q φ, V = V P Ω ξηζ. total kinetic energy of the rotor E k = VT MV. V q T M V + d dt V q T V q T MV = Q q. q {x C, y C, z C, ψ, θ, φ
13 Inertia coupling equations For example equation of rotational motion due to the first rotational coordinate. Linearization: sin α α cos α α ψ, θ - small angles. ψ[j cos φ J sinφ + J sin φ + θ(j 3 cosφ J 3 sinφ) + θ J 33 ] + θ (J J )sinφcosφ + J (cos φ sin φ) + θ(j 3 sinφ + J 3 cosφ) + φ [J 3 cosφ J 3 sinφ + θj 33 ] + φ θ (J J )cosφ J sinφ + θ(j 3 cosφ J 3 sinφ) + J 33 + φ ψ (J J )sinφ J cosφ θ(j 3 sinφ + J 3 cosφ) + ψ θ [J 3 cosφ J 3 sinφ + θj 33 ] + (θ φ )(J 3 sinφ + J 3 cosφ) = Q ψ Q zc e sin(β + φ ). 3
14 Decoupling the equations of the rotor motion Implicit form: Φ q, q, q = 0 a very difficult task Explicit form: q = Φ ( q, q) The decoupling simplifies numerical integration. 4 Standard form: q = q, q q = Φ 3 (q )
15 Four models of the rotor Model Form of the equations Inertia matrix Level of the linearization α {ψ, θ Numeric efficiency Explicit form Simplifying assumptions J = J 3 = 0 sin α α cos α Faster, the smallest number of arithmetic operations Implicit matrix form Full without simplifying assumptions sin α α cos α Matrix multiplication required 3 Implicit matrix form Full without simplifying assumptions sin α α cos α α Additional cost of calculating the correction matrix 4 Implicit matrix form Full without simplifying assumptions Without linearization Additional cost of calculating sines and cosines of angles ψ, θ 5
16 First method of decupling Model n0. of the rotor J cos φ + J sin φ J J sinφcosφ J 3 cosφ + θj 33 J J sinφcosφ J sin φ + J cos φ J 3 sinφ J 3 cosφ + θj 33 J 3 sinφ J 33 F ψ (ψ, θ, φ, ψ, θ, φ, Q xc, Q yc, Q zc, Q ψ, Q θ, Q φ ) = F θ (ψ, θ, φ, ψ, θ, φ, Q xc, Q yc, Q zc, Q ψ, Q θ, Q φ, F φ (ψ, θ, φ, ψ, θ, φ, Q xc, Q yc, Q zc, Q ψ, Q θ, Q φ ψ θ φ H ψ θ φ = F ψ F θ F φ. ψ θ φ = H φ F ψ F θ F φ. x C yc z C = m F xc F yc F zc, 6
17 Other method of decupling Model n0. of the rotor V = A(q) q A T MA q + (A T M A + BMA) q = Q. q = C Q (A T M A + BMA) q. A = e sin β + φ e cos β + φ 0 0 e sin β + φ e cos(β + φ) e ψ cos β + φ + θ sin β + φ cosφ sinφ sinφ cosφ θ 0 B = φ sinφ φ cosφ θ φ cosφ θcosφ + ψsinφ 7 φ sinφ θsinφ + ψ ψcosφ 0.
18 Three methods used to verify the model mathematical verification - comparison of equations verification by simulation methods - comparison of vibration signals from simulations experimental verification- comparison of measured vibration signals with simulation results 8
19 Mathematical verification - comparison of equations Proposed 6 DOF model with static and dynamic imbalance 6 DOF ideal rotor turning off imbalance linearization Simplified 6 DOF model v. From Euler-Newton equations switching off torsional and longitudinal vibrations 4 DOF model from literature 9
20 Verification by simulation methods - comparison of vibration signals from simulations Jetcrofft s rotor 6 DOF Developed by the author Jetcrofft s rotor 4 DOF 0
21 The distance between the center of mass of the rotor and the axis of rotation Verification by simulation methods - comparison of vibration signals from simulations Slower startup - less torsional vibrations - greater compatibility


22 Experimental verificationcomparison of measured vibration signals with simulation results Frequency o the flexural vibrations measured on the bearings were compared. More comprehensive comparison is planned.

23 Interactions between the rigid rotor and the shaft 3

24 Proposed decomposition method of typical rotating system 4

25 Interactions between the inertial and compliance elements 5

26 Simulink library for modeling and simulation of dynamic phenomena in rotating power transmission systems From: Model of thin rigid rotor To: Forces kinematic output 6


27 Thin vs. Long Rotor Presented model can be easily generalized to the case of a long rotor. thin rotor long rotor Two additional outputs are necessary 7
28 Block modelling the shaft force acting to left inertia element kinematic signal from left inertia element kinematic signal internal DOF force acting to right inertia element kinematic signal from right inertia element Block modeling shaft must have external DOF (6 on each end). 8 8

29 FEM model of the shaft FEM - Timoshenko beam elements better! Rigid Finite Element Method (beam elements) faster! 9
30 Rigid Finite Element Method 30
31 A special beam element Coordinate system axes do not have to be the principal axes of inertia N M x M y T y T x M z = EA ES x ES y ES x EI x ED xy ES y ED xy EI y χ y GA 0 χ y GS y χ x GA χ x GS x χ y GS y χ x GS x G(χ x I x + χ y I y ) ε κ x κ y β x β y κ z. N = N uu N uv 0 N uψ N uθ N uφ N uu N uv 0 N uψ N uθ N uφ N vu N vv 0 N vψ N vθ N vφ N vu N vv 0 N vψ N vθ N vφ N wu N wv N ww N wψ N wθ N wφ N wu N wv N ww N wψ N wθ N wφ N ψu N ψv 0 N ψψ N ψθ N ψφ N ψu N ψv 0 N ψψ N ψθ N ψφ N θu N θv 0 N θψ N θθ N θφ N θu N θv 0 N θψ N θθ N θφ N φφ N φφ. Mq + η V K + ΩG q + K + η V ΩK C + Ω G q = Q + Q u Ω f φ, 3

 n + D(q b q")
32 Universal dynamic model of the bearing F B = K(q b q h ) + K n (q b q h ) n + D(q b q h), 3

33 Universal dynamic model of the clutch F W = F W (q L, q L, q R, q R), 33


34 Broadband torsional vibration damper Rubber damper Viscous damper 34


35 Influence of dynamic imbalance on the vibrations Machine startup simulation ω n = 000 rad/s t n =.5 s Four cases of the main rotor dynamic imbalance: 0 0 ; 5 0 ; 0 0 ;
36 Simulink model 36
37 Trajectory of the mass center main rotor 37


38 Trajectory of the mass center external rotor 38

39 X component of transverse vibration 39

40 Gyroscopic effect - inclination angle of the rotor 40
41 Torsional vibration velocity difference between the main rotor speed and drive speed d /dt [rad/s] t [s]
42 Torsional vibration acceleration 4


43 Gyroscopic effect dynamic imbalance

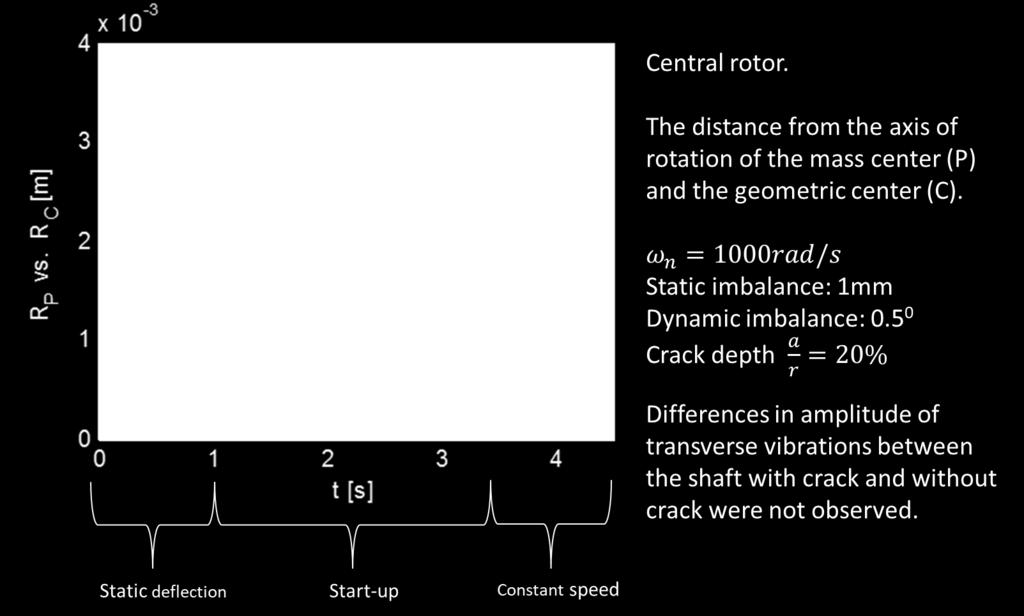
44 Distance from the geometric axis of rotation 44
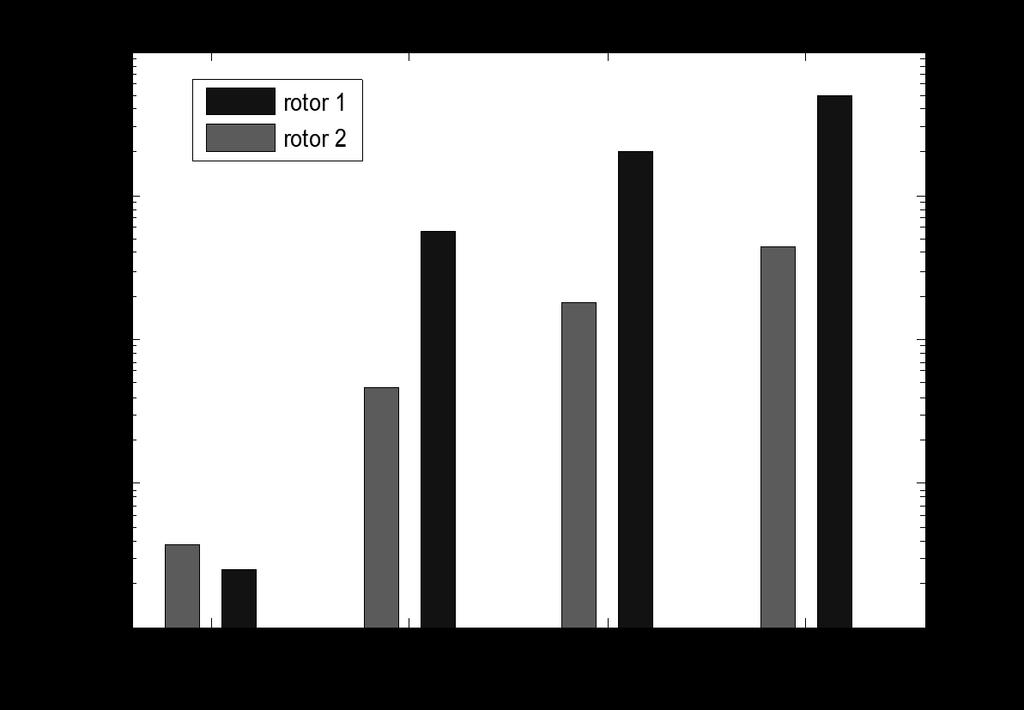
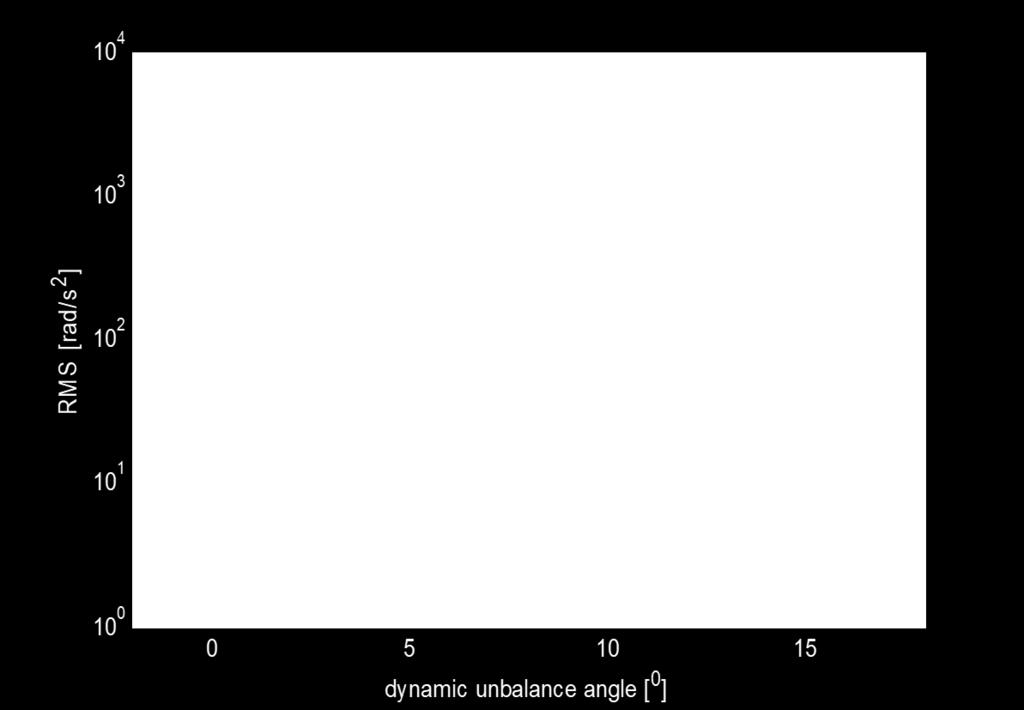
45 RMS of accelerations of torsional vibrations 45

46 Scheme of the rotating system with transverse crack RFEM elements K = K f ψ ΔK f ψ = + cos ψ - crak open 0- crak closed 46

47 Selected results of simulations 47
48 Spectrogram of the gyroscopic acceleration of the central rotor without crak 48

49 Spectrogram of the gyroscopic acceleration of the central rotor with crak 49
50 Conclusions Presented method of modeling the rotating systems is an alternative to existing systems based on FEM. Its advantage is the relatively small number of degrees of freedom which reduces simulation time and allows to study non-steady states with low cost of computer hardware. The authors library of Simulink blocks can be freely expanded with new elements. Another advantage is ability to easily integrate with tools and models available in Simulink and Matlab. 50


51 Thank you for your attention 5
1820. Selection of torsional vibration damper based on the results of simulation
 8. Selection of torsional vibration damper based on the results of simulation Tomasz Matyja, Bogusław Łazarz Silesian University of Technology, Faculty of Transport, Gliwice, Poland Corresponding author
8. Selection of torsional vibration damper based on the results of simulation Tomasz Matyja, Bogusław Łazarz Silesian University of Technology, Faculty of Transport, Gliwice, Poland Corresponding author
Finite element analysis of rotating structures
 Finite element analysis of rotating structures Dr. Louis Komzsik Chief Numerical Analyst Siemens PLM Software Why do rotor dynamics with FEM? Very complex structures with millions of degrees of freedom
Finite element analysis of rotating structures Dr. Louis Komzsik Chief Numerical Analyst Siemens PLM Software Why do rotor dynamics with FEM? Very complex structures with millions of degrees of freedom
Dynamic Analysis of Pelton Turbine and Assembly
 Dynamic Analysis of Pelton Turbine and Assembly Aman Rajak, Prateek Shrestha, Manoj Rijal, Bishal Pudasaini, Mahesh Chandra Luintel Department of Mechanical Engineering, Central Campus, Pulchowk, Institute
Dynamic Analysis of Pelton Turbine and Assembly Aman Rajak, Prateek Shrestha, Manoj Rijal, Bishal Pudasaini, Mahesh Chandra Luintel Department of Mechanical Engineering, Central Campus, Pulchowk, Institute
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Rigid Body Rotation. Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li. Department of Applied Mathematics and Statistics Stony Brook University (SUNY)
") Rigid Body Rotation Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li Department of Applied Mathematics and Statistics Stony Brook University (SUNY) Content Introduction Angular Velocity Angular Momentum
Rigid Body Rotation Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li Department of Applied Mathematics and Statistics Stony Brook University (SUNY) Content Introduction Angular Velocity Angular Momentum
Vibration Dynamics and Control
 Giancarlo Genta Vibration Dynamics and Control Spri ringer Contents Series Preface Preface Symbols vii ix xxi Introduction 1 I Dynamics of Linear, Time Invariant, Systems 23 1 Conservative Discrete Vibrating
Giancarlo Genta Vibration Dynamics and Control Spri ringer Contents Series Preface Preface Symbols vii ix xxi Introduction 1 I Dynamics of Linear, Time Invariant, Systems 23 1 Conservative Discrete Vibrating
EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION
 1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
Investigation of Coupled Lateral and Torsional Vibrations of a Cracked Rotor Under Radial Load
 NOMENCLATURE Investigation of Coupled Lateral and Torsional Vibrations of a Cracked Rotor Under Radial Load Xi Wu, Assistant Professor Jim Meagher, Professor Clinton Judd, Graduate Student Department of
NOMENCLATURE Investigation of Coupled Lateral and Torsional Vibrations of a Cracked Rotor Under Radial Load Xi Wu, Assistant Professor Jim Meagher, Professor Clinton Judd, Graduate Student Department of
WEEKS 8-9 Dynamics of Machinery
 WEEKS 8-9 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2011 Mechanical Vibrations, Singiresu S. Rao, 2010 Mechanical Vibrations: Theory and
WEEKS 8-9 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2011 Mechanical Vibrations, Singiresu S. Rao, 2010 Mechanical Vibrations: Theory and
Introduction to Mechanical Vibration
 2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
Program System for Machine Dynamics. Abstract. Version 5.0 November 2017
 Program System for Machine Dynamics Abstract Version 5.0 November 2017 Ingenieur-Büro Klement Lerchenweg 2 D 65428 Rüsselsheim Phone +49/6142/55951 hd.klement@t-online.de What is MADYN? The program system
Program System for Machine Dynamics Abstract Version 5.0 November 2017 Ingenieur-Büro Klement Lerchenweg 2 D 65428 Rüsselsheim Phone +49/6142/55951 hd.klement@t-online.de What is MADYN? The program system
Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances
 Journal of mathematics and computer Science 9 (2014) 139-148 Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances Amir Karimian 1, Saied Shokrollahi 2, Shahram Yousefi
Journal of mathematics and computer Science 9 (2014) 139-148 Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances Amir Karimian 1, Saied Shokrollahi 2, Shahram Yousefi
Effects of Structural Forces on the Dynamic Performance of High Speed Rotating Impellers.
 Effects of Structural Forces on the Dynamic Performance of High Speed Rotating Impellers. G Shenoy 1, B S Shenoy 1 and Raj C Thiagarajan 2 * 1 Dept. of Mechanical & Mfg. Engineering, Manipal Institute
Effects of Structural Forces on the Dynamic Performance of High Speed Rotating Impellers. G Shenoy 1, B S Shenoy 1 and Raj C Thiagarajan 2 * 1 Dept. of Mechanical & Mfg. Engineering, Manipal Institute
Study of coupling between bending and torsional vibration of cracked rotor system supported by radial active magnetic bearings
 Applied and Computational Mechanics 1 (2007) 427-436 Study of coupling between bending and torsional vibration of cracked rotor system supported by radial active magnetic bearings P. Ferfecki a, * a Center
Applied and Computational Mechanics 1 (2007) 427-436 Study of coupling between bending and torsional vibration of cracked rotor system supported by radial active magnetic bearings P. Ferfecki a, * a Center
Variation Principle in Mechanics
 Section 2 Variation Principle in Mechanics Hamilton s Principle: Every mechanical system is characterized by a Lagrangian, L(q i, q i, t) or L(q, q, t) in brief, and the motion of he system is such that
Section 2 Variation Principle in Mechanics Hamilton s Principle: Every mechanical system is characterized by a Lagrangian, L(q i, q i, t) or L(q, q, t) in brief, and the motion of he system is such that
Towards Rotordynamic Analysis with COMSOL Multiphysics
 Towards Rotordynamic Analysis with COMSOL Multiphysics Martin Karlsson *1, and Jean-Claude Luneno 1 1 ÅF Sound & Vibration *Corresponding author: SE-169 99 Stockholm, martin.r.karlsson@afconsult.com Abstract:
Towards Rotordynamic Analysis with COMSOL Multiphysics Martin Karlsson *1, and Jean-Claude Luneno 1 1 ÅF Sound & Vibration *Corresponding author: SE-169 99 Stockholm, martin.r.karlsson@afconsult.com Abstract:
Finite element method based analysis and modeling in rotordynamics
 Finite element method based analysis and modeling in rotordynamics A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements for the degree of
Finite element method based analysis and modeling in rotordynamics A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements for the degree of
Rotor Dynamics. By Jaafar Alsalaet Department of Mechanical Engineering College of Engineering University of Basrah
 Rotor Dynamics By Jaafar Alsalaet Department of Mechanical Engineering College of Engineering University of Basrah 1. Introduction and Definitions Rotor Dynamics is the field of science that studies the
Rotor Dynamics By Jaafar Alsalaet Department of Mechanical Engineering College of Engineering University of Basrah 1. Introduction and Definitions Rotor Dynamics is the field of science that studies the
ANALYSIS AND IDENTIFICATION IN ROTOR-BEARING SYSTEMS
 ANALYSIS AND IDENTIFICATION IN ROTOR-BEARING SYSTEMS A Lecture Notes Developed under the Curriculum Development Scheme of Quality Improvement Programme at IIT Guwahati Sponsored by All India Council of
ANALYSIS AND IDENTIFICATION IN ROTOR-BEARING SYSTEMS A Lecture Notes Developed under the Curriculum Development Scheme of Quality Improvement Programme at IIT Guwahati Sponsored by All India Council of
The Effect of the Shaft Diameter and Torsional Stiffness on the Whirling Speed of the Ship Propeller Shafting System
 Journal of Mechanical Design and Vibration, 2017, Vol. 5, No. 1, 37-42 Available online at http://pubs.sciepub.com/jmdv/5/1/5 Science and Education Publishing DOI:10.12691/jmdv-5-1-5 The Effect of the
Journal of Mechanical Design and Vibration, 2017, Vol. 5, No. 1, 37-42 Available online at http://pubs.sciepub.com/jmdv/5/1/5 Science and Education Publishing DOI:10.12691/jmdv-5-1-5 The Effect of the
Name: Fall 2014 CLOSED BOOK
 Name: Fall 2014 1. Rod AB with weight W = 40 lb is pinned at A to a vertical axle which rotates with constant angular velocity ω =15 rad/s. The rod position is maintained by a horizontal wire BC. Determine
Name: Fall 2014 1. Rod AB with weight W = 40 lb is pinned at A to a vertical axle which rotates with constant angular velocity ω =15 rad/s. The rod position is maintained by a horizontal wire BC. Determine
Application of Nonlinear Dynamics Tools for Diagnosis of Cracked Rotor Vibration Signatures
 Application of Nonlinear Dynamics Tools for Diagnosis of Cracked Rotor Vibration Signatures Jery T. Sawicki *, Xi Wu *, Andrew L. Gyekenyesi **, George Y. Baaklini * Cleveland State University, Dept. of
Application of Nonlinear Dynamics Tools for Diagnosis of Cracked Rotor Vibration Signatures Jery T. Sawicki *, Xi Wu *, Andrew L. Gyekenyesi **, George Y. Baaklini * Cleveland State University, Dept. of
Jamil Sami Haddad 1, Waleed Momani 2
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 78-1684,p-ISSN: 30-334X, Volume 11, Issue 4 Ver. VIII (Jul- Aug. 014), PP 46-5 A comparison of two theoretical methods of the materials
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 78-1684,p-ISSN: 30-334X, Volume 11, Issue 4 Ver. VIII (Jul- Aug. 014), PP 46-5 A comparison of two theoretical methods of the materials
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Automated Estimation of an Aircraft s Center of Gravity Using Static and Dynamic Measurements
 Proceedings of the IMAC-XXVII February 9-, 009 Orlando, Florida USA 009 Society for Experimental Mechanics Inc. Automated Estimation of an Aircraft s Center of Gravity Using Static and Dynamic Measurements
Proceedings of the IMAC-XXVII February 9-, 009 Orlando, Florida USA 009 Society for Experimental Mechanics Inc. Automated Estimation of an Aircraft s Center of Gravity Using Static and Dynamic Measurements
Advanced Vibrations. Elements of Analytical Dynamics. By: H. Ahmadian Lecture One
 Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Texture, Microstructure & Anisotropy A.D. (Tony) Rollett
 Rollett") 1 Carnegie Mellon MRSEC 27-750 Texture, Microstructure & Anisotropy A.D. (Tony) Rollett Last revised: 5 th Sep. 2011 2 Show how to convert from a description of a crystal orientation based on Miller indices
1 Carnegie Mellon MRSEC 27-750 Texture, Microstructure & Anisotropy A.D. (Tony) Rollett Last revised: 5 th Sep. 2011 2 Show how to convert from a description of a crystal orientation based on Miller indices
COPYRIGHTED MATERIAL. Index
 Index A Admissible function, 163 Amplification factor, 36 Amplitude, 1, 22 Amplitude-modulated carrier, 630 Amplitude ratio, 36 Antinodes, 612 Approximate analytical methods, 647 Assumed modes method,
Index A Admissible function, 163 Amplification factor, 36 Amplitude, 1, 22 Amplitude-modulated carrier, 630 Amplitude ratio, 36 Antinodes, 612 Approximate analytical methods, 647 Assumed modes method,
Dynamic Model of a Badminton Stroke
 ISEA 28 CONFERENCE Dynamic Model of a Badminton Stroke M. Kwan* and J. Rasmussen Department of Mechanical Engineering, Aalborg University, 922 Aalborg East, Denmark Phone: +45 994 9317 / Fax: +45 9815
ISEA 28 CONFERENCE Dynamic Model of a Badminton Stroke M. Kwan* and J. Rasmussen Department of Mechanical Engineering, Aalborg University, 922 Aalborg East, Denmark Phone: +45 994 9317 / Fax: +45 9815
Introduction to Vibration. Mike Brennan UNESP, Ilha Solteira São Paulo Brazil
 Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
SAMCEF For ROTORS. Chapter 1 : Physical Aspects of rotor dynamics. This document is the property of SAMTECH S.A. MEF A, Page 1
 SAMCEF For ROTORS Chapter 1 : Physical Aspects of rotor dynamics This document is the property of SAMTECH S.A. MEF 101-01-A, Page 1 Table of Contents rotor dynamics Introduction Rotating parts Gyroscopic
SAMCEF For ROTORS Chapter 1 : Physical Aspects of rotor dynamics This document is the property of SAMTECH S.A. MEF 101-01-A, Page 1 Table of Contents rotor dynamics Introduction Rotating parts Gyroscopic
Introduction to Waves in Structures. Mike Brennan UNESP, Ilha Solteira São Paulo Brazil
 Introduction to Waves in Structures Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Waves in Structures Characteristics of wave motion Structural waves String Rod Beam Phase speed, group velocity Low
Introduction to Waves in Structures Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Waves in Structures Characteristics of wave motion Structural waves String Rod Beam Phase speed, group velocity Low
Dynamics and Control of Rotorcraft
 Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
VIBRATION PROBLEMS IN ENGINEERING
 VIBRATION PROBLEMS IN ENGINEERING FIFTH EDITION W. WEAVER, JR. Professor Emeritus of Structural Engineering The Late S. P. TIMOSHENKO Professor Emeritus of Engineering Mechanics The Late D. H. YOUNG Professor
VIBRATION PROBLEMS IN ENGINEERING FIFTH EDITION W. WEAVER, JR. Professor Emeritus of Structural Engineering The Late S. P. TIMOSHENKO Professor Emeritus of Engineering Mechanics The Late D. H. YOUNG Professor
Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter.
 Chapter 3 Mechanical Systems A. Bazoune 3.1 INRODUCION Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter. 3. MECHANICAL ELEMENS Any mechanical system consists
Chapter 3 Mechanical Systems A. Bazoune 3.1 INRODUCION Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter. 3. MECHANICAL ELEMENS Any mechanical system consists
Chapter 4 The Equations of Motion
 Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Modeling and Vibration analysis of shaft misalignment
 Volume 114 No. 11 2017, 313-323 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Modeling and Vibration analysis of shaft misalignment Amit. M. Umbrajkaar
Volume 114 No. 11 2017, 313-323 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Modeling and Vibration analysis of shaft misalignment Amit. M. Umbrajkaar
Dynamics of Machinery
 Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Table of Contents. Preface... 13
 Table of Contents Preface... 13 Chapter 1. Vibrations of Continuous Elastic Solid Media... 17 1.1. Objective of the chapter... 17 1.2. Equations of motion and boundary conditions of continuous media...
Table of Contents Preface... 13 Chapter 1. Vibrations of Continuous Elastic Solid Media... 17 1.1. Objective of the chapter... 17 1.2. Equations of motion and boundary conditions of continuous media...
On The Finite Element Modeling Of Turbo Machinery Rotors In Rotor Dynamic Analysis
 Proceedings of The Canadian Society for Mechanical Engineering International Congress 2018 CSME International Congress 2018 May 27-30, 2018, Toronto, On, Canada On The Finite Element Modeling Of Turbo
Proceedings of The Canadian Society for Mechanical Engineering International Congress 2018 CSME International Congress 2018 May 27-30, 2018, Toronto, On, Canada On The Finite Element Modeling Of Turbo
DYNAMICS OF MACHINERY 41514
 DYNAMICS OF MACHINERY 454 PROJECT : Theoretical and Experimental Modal Analysis and Validation of Mathematical Models in Multibody Dynamics Holistic Overview of the Project Steps & Their Conceptual Links
DYNAMICS OF MACHINERY 454 PROJECT : Theoretical and Experimental Modal Analysis and Validation of Mathematical Models in Multibody Dynamics Holistic Overview of the Project Steps & Their Conceptual Links
Mathematical model of static deformation of micropolar elastic circular thin bar
 Mathematical model of static deformation of micropolar elastic circular thin bar Mathematical model of static deformation of micropolar elastic circular thin bar Samvel H. Sargsyan, Meline V. Khachatryan
Mathematical model of static deformation of micropolar elastic circular thin bar Mathematical model of static deformation of micropolar elastic circular thin bar Samvel H. Sargsyan, Meline V. Khachatryan
Smartphone sensor based orientation determination for indoor navigation
 Smartphone sensor based orientation determination for indoor naviation LBS Conference 15.11.2016 Andreas Ettliner Research Group Enineerin Geodesy Contact: andreas.ettliner@tuwien.ac.at Outline Motivation
Smartphone sensor based orientation determination for indoor naviation LBS Conference 15.11.2016 Andreas Ettliner Research Group Enineerin Geodesy Contact: andreas.ettliner@tuwien.ac.at Outline Motivation
D : SOLID MECHANICS. Q. 1 Q. 9 carry one mark each.
 GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Critical Speed Analysis of Offset Jeffcott Rotor Using English and Metric Units
 Dyrobes Rotordynamics Software https://dyrobes.com Critical Speed Analysis of Offset Jeffcott Rotor Using English and Metric Units E. J. Gunter,PhD Fellow ASME February,2004 RODYN Vibration Inc. 1932 Arlington
Dyrobes Rotordynamics Software https://dyrobes.com Critical Speed Analysis of Offset Jeffcott Rotor Using English and Metric Units E. J. Gunter,PhD Fellow ASME February,2004 RODYN Vibration Inc. 1932 Arlington
2.003 Engineering Dynamics Problem Set 4 (Solutions)
") .003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
.003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
DYNAMIC ANALYSIS OF ROTOR-BEARING SYSTEM FOR FLEXIBLE BEARING SUPPORT CONDITION
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 7, July 2017, pp. 1785 1792, Article ID: IJMET_08_07_197 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=7
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 7, July 2017, pp. 1785 1792, Article ID: IJMET_08_07_197 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=7
PROJECT 1 DYNAMICS OF MACHINES 41514
 PROJECT DYNAMICS OF MACHINES 454 Theoretical and Experimental Modal Analysis and Validation of Mathematical Models in Multibody Dynamics Ilmar Ferreira Santos, Professor Dr.-Ing., Dr.Techn., Livre-Docente
PROJECT DYNAMICS OF MACHINES 454 Theoretical and Experimental Modal Analysis and Validation of Mathematical Models in Multibody Dynamics Ilmar Ferreira Santos, Professor Dr.-Ing., Dr.Techn., Livre-Docente
Evaluation of Campbell diagrams for vertical hydropower machines supported by Tilting Pad Journal Bearings
 Evaluation of Campbell diagrams for vertical hydropower machines supported by Tilting Pad Journal Bearings Florian Thiery 1 *, Rolf Gustavsson, Jan-Olov Aidanpää 1 SYMPOSIA ON ROTATING MACHINERY ISROMAC
Evaluation of Campbell diagrams for vertical hydropower machines supported by Tilting Pad Journal Bearings Florian Thiery 1 *, Rolf Gustavsson, Jan-Olov Aidanpää 1 SYMPOSIA ON ROTATING MACHINERY ISROMAC
Verification of assumptions in dynamics of lattice structures
 Verification of assumptions in dynamics of lattice structures B.Błachowski and W.Gutkowski Warsaw, Poland 37th SOLD MECHANCS CONFERENCE, Warsaw, Poland September 6 1, 21 Outline of presentation 1. Motivation
Verification of assumptions in dynamics of lattice structures B.Błachowski and W.Gutkowski Warsaw, Poland 37th SOLD MECHANCS CONFERENCE, Warsaw, Poland September 6 1, 21 Outline of presentation 1. Motivation
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar (Iumár) Ferreira Santos 1. Course Structure 2. Objectives 3. Theoretical and Experimental Example 4. Industrial
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar (Iumár) Ferreira Santos 1. Course Structure 2. Objectives 3. Theoretical and Experimental Example 4. Industrial
Examples of Applications of Potential Functions in Problem Solving (Web Appendix to the Paper)
") Examples of Applications of otential Functions in roblem Solving (Web Appendix to the aper) Ali Mehrizi-Sani and Reza Iravani May 5, 2010 1 Introduction otential functions may be exploited to formulate
Examples of Applications of otential Functions in roblem Solving (Web Appendix to the aper) Ali Mehrizi-Sani and Reza Iravani May 5, 2010 1 Introduction otential functions may be exploited to formulate
Classical Mechanics. Luis Anchordoqui
 1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
NX Nastran 10. Rotor Dynamics User s Guide
 NX Nastran 10 Rotor Dynamics User s Guide Proprietary & Restricted Rights Notice 2014 Siemens Product Lifecycle Management Software Inc. All Rights Reserved. This software and related documentation are
NX Nastran 10 Rotor Dynamics User s Guide Proprietary & Restricted Rights Notice 2014 Siemens Product Lifecycle Management Software Inc. All Rights Reserved. This software and related documentation are
Automatic two-plane balancing for rigid rotors
 Automatic two-plane balancing for rigid rotors D.J. Rodrigues, A.R. Champneys, M.I. Friswell, R.E. Wilson To cite this version: D.J. Rodrigues, A.R. Champneys, M.I. Friswell, R.E. Wilson. Automatic two-plane
Automatic two-plane balancing for rigid rotors D.J. Rodrigues, A.R. Champneys, M.I. Friswell, R.E. Wilson To cite this version: D.J. Rodrigues, A.R. Champneys, M.I. Friswell, R.E. Wilson. Automatic two-plane
CE 530 Molecular Simulation
 CE 530 Molecular Simulation Lecture 7 Beyond Atoms: Simulating Molecules David A. Kofke Department of Chemical Engineering SUNY Buffalo kofke@eng.buffalo.edu Review Fundamentals units, properties, statistical
CE 530 Molecular Simulation Lecture 7 Beyond Atoms: Simulating Molecules David A. Kofke Department of Chemical Engineering SUNY Buffalo kofke@eng.buffalo.edu Review Fundamentals units, properties, statistical
VIBRATION ANALYSIS OF TIE-ROD/TIE-BOLT ROTORS USING FEM
 VIBRATION ANALYSIS OF TIE-ROD/TIE-BOLT ROTORS USING FEM J. E. Jam, F. Meisami Composite Materials and Technology Center Tehran, IRAN jejaam@gmail.com N. G. Nia Iran Polymer & Petrochemical Institute, Tehran,
VIBRATION ANALYSIS OF TIE-ROD/TIE-BOLT ROTORS USING FEM J. E. Jam, F. Meisami Composite Materials and Technology Center Tehran, IRAN jejaam@gmail.com N. G. Nia Iran Polymer & Petrochemical Institute, Tehran,
Vibrations in Mechanical Systems
 Maurice Roseau Vibrations in Mechanical Systems Analytical Methods and Applications With 112 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Contents Chapter I. Forced Vibrations
Maurice Roseau Vibrations in Mechanical Systems Analytical Methods and Applications With 112 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Contents Chapter I. Forced Vibrations
FREE VIBRATIONS OF FRAMED STRUCTURES WITH INCLINED MEMBERS
 FREE VIBRATIONS OF FRAMED STRUCTURES WITH INCLINED MEMBERS A Thesis submitted in partial fulfillment of the requirements for the degree of Bachelor of Technology in Civil Engineering By JYOTI PRAKASH SAMAL
FREE VIBRATIONS OF FRAMED STRUCTURES WITH INCLINED MEMBERS A Thesis submitted in partial fulfillment of the requirements for the degree of Bachelor of Technology in Civil Engineering By JYOTI PRAKASH SAMAL
Nonlinear Dynamics Analysis of a Gear-Shaft-Bearing System with Breathing Crack and Tooth Wear Faults
 Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2015, 9, 483-491 483 Open Access Nonlinear Dynamics Analysis of a Gear-Shaft-Bearing System with Breathing
Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2015, 9, 483-491 483 Open Access Nonlinear Dynamics Analysis of a Gear-Shaft-Bearing System with Breathing
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
1 Introduction. Minho Lee 1 Jihoon Lee 1 Gunhee Jang 1
 DOI 10.1007/s005-015-5-5 TECHNICAL PAPER Stability analysis of a whirling rigid rotor supported by stationary grooved FDBs considering the five degrees of freedom of a general rotor bearing system Minho
DOI 10.1007/s005-015-5-5 TECHNICAL PAPER Stability analysis of a whirling rigid rotor supported by stationary grooved FDBs considering the five degrees of freedom of a general rotor bearing system Minho
Complex modes analysis for powertrain and driveline applications
 Complex modes analysis for powertrain and driveline applications T. Parikyan 1 1 AVL List GmbH, Advanced Simulation Technologies Hans-List-Platz 1, A-8020, Graz, Austria e-mail: tigran.parikyan@avl.com
Complex modes analysis for powertrain and driveline applications T. Parikyan 1 1 AVL List GmbH, Advanced Simulation Technologies Hans-List-Platz 1, A-8020, Graz, Austria e-mail: tigran.parikyan@avl.com
Lecture 37: Principal Axes, Translations, and Eulerian Angles
 Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
MEC3403. Dynamics II. Introductory book. Faculty of Engineering and Surveying
 MEC3403 Dynamics II Faculty of Engineering and Surveying Introductory book Semester 2 2010 Published by University of Southern Queensland Toowoomba Queensland 4350 Australia http://www.usq.edu.au University
MEC3403 Dynamics II Faculty of Engineering and Surveying Introductory book Semester 2 2010 Published by University of Southern Queensland Toowoomba Queensland 4350 Australia http://www.usq.edu.au University
SECTION 1. Introduction to MD NASTRAN SOL 400
 SECTION 1 Introduction to MD NASTRAN SOL 400 S1-1 S1-2 What is "MD NASTRAN"? Evolution of engineering challenges: Complex systems vs. "just parts" Interacting environments Disparate tools and databases
SECTION 1 Introduction to MD NASTRAN SOL 400 S1-1 S1-2 What is "MD NASTRAN"? Evolution of engineering challenges: Complex systems vs. "just parts" Interacting environments Disparate tools and databases
Vibration Analysis of Hollow Profiled Shafts
 International Journal of Current Engineering and echnology ISSN 77-406 04 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Research Article Vibration Analysis of Hollow
International Journal of Current Engineering and echnology ISSN 77-406 04 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Research Article Vibration Analysis of Hollow
Modeling of Resonators
 . 23 Modeling of Resonators 23 1 Chapter 23: MODELING OF RESONATORS 23 2 23.1 A GENERIC RESONATOR A second example where simplified discrete modeling has been found valuable is in the assessment of the
. 23 Modeling of Resonators 23 1 Chapter 23: MODELING OF RESONATORS 23 2 23.1 A GENERIC RESONATOR A second example where simplified discrete modeling has been found valuable is in the assessment of the
ME 563 Mechanical Vibrations Lecture #1. Derivation of equations of motion (Newton-Euler Laws)
") ME 563 Mechanical Vibrations Lecture #1 Derivation of equations of motion (Newton-Euler Laws) Derivation of Equation of Motion 1 Define the vibrations of interest - Degrees of freedom (translational, rotational,
ME 563 Mechanical Vibrations Lecture #1 Derivation of equations of motion (Newton-Euler Laws) Derivation of Equation of Motion 1 Define the vibrations of interest - Degrees of freedom (translational, rotational,
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques
 for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques") Basrah Journal for Engineering Sciences, vol. 14, no. 2, 2014 255 Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques Dr. Ameen Ahmed Nassar
Basrah Journal for Engineering Sciences, vol. 14, no. 2, 2014 255 Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques Dr. Ameen Ahmed Nassar
Chapter 4 Statics and dynamics of rigid bodies
 Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Dept.of Mechanical Engg, Defence Institute of Advanced Technology, Pune. India
 Applied Mechanics and Materials Submitted: 2014-04-23 ISSN: 1662-7482, Vols. 592-594, pp 1084-1088 Revised: 2014-05-16 doi:10.4028/www.scientific.net/amm.592-594.1084 Accepted: 2014-05-19 2014 Trans Tech
Applied Mechanics and Materials Submitted: 2014-04-23 ISSN: 1662-7482, Vols. 592-594, pp 1084-1088 Revised: 2014-05-16 doi:10.4028/www.scientific.net/amm.592-594.1084 Accepted: 2014-05-19 2014 Trans Tech
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
7. FORCE ANALYSIS. Fundamentals F C
 ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
UNIT-I (FORCE ANALYSIS)
") DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
Structural System, Machines and Load Cases
 Machine-Induced Vibrations Machine-Induced Vibrations In the following example the dynamic excitation of two rotating machines is analyzed. A time history analysis in the add-on module RF-DYNAM Pro - Forced
Machine-Induced Vibrations Machine-Induced Vibrations In the following example the dynamic excitation of two rotating machines is analyzed. A time history analysis in the add-on module RF-DYNAM Pro - Forced
A Modelica Library of Anisotropic Flexible Beam Structures for the Simulation of Composite Rotor Blades
 A Modelica Library of Anisotropic Flexible Beam Structures for the Simulation of Composite Rotor Blades Christian Spieß Manfred Hajek Technische Universität München, Institute for Helicopter Technology
A Modelica Library of Anisotropic Flexible Beam Structures for the Simulation of Composite Rotor Blades Christian Spieß Manfred Hajek Technische Universität München, Institute for Helicopter Technology
Extended Application Of Time-Varying Observer For Rigid Rotors Unbalance Estimation During Acceleration
 MATEC Web of Conferences 67, 5 (8) IC4M & ICDES 8 https://doi.org/.5/matecconf/8675 Extended Application Of Time-Varying Observer For Rigid Rotors Unbalance Estimation During Acceleration Xunxing Yu,a,
MATEC Web of Conferences 67, 5 (8) IC4M & ICDES 8 https://doi.org/.5/matecconf/8675 Extended Application Of Time-Varying Observer For Rigid Rotors Unbalance Estimation During Acceleration Xunxing Yu,a,
. D CR Nomenclature D 1
 . D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
. D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
A Quantum Mechanical Model for the Vibration and Rotation of Molecules. Rigid Rotor
 A Quantum Mechanical Model for the Vibration and Rotation of Molecules Harmonic Oscillator Rigid Rotor Degrees of Freedom Translation: quantum mechanical model is particle in box or free particle. A molecule
A Quantum Mechanical Model for the Vibration and Rotation of Molecules Harmonic Oscillator Rigid Rotor Degrees of Freedom Translation: quantum mechanical model is particle in box or free particle. A molecule
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction
 Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
DYNAMICS OF MACHINES
 DYNAMICS OF MACHINES Modelling Simulation Visualization Verification Ilmar Ferreira Santos, Professor, Dr.-Ing., Dr.Techn., Livre-Docente Department of Mechanical Engineering Technical University of Denmark
DYNAMICS OF MACHINES Modelling Simulation Visualization Verification Ilmar Ferreira Santos, Professor, Dr.-Ing., Dr.Techn., Livre-Docente Department of Mechanical Engineering Technical University of Denmark
Modeling a powertrain in Simscape in a modular vehicle component model library. Stuttgart, , MBtech, Jörn Bader
 Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Dynamics of assembled structures of rotor systems of aviation gas turbine engines of type two-rotor
 Dynamics of assembled structures of rotor systems of aviation gas turbine engines of type two-rotor Anatoly А. Pykhalov 1, Mikhail А. Dudaev 2, Mikhail Ye. Kolotnikov 3, Paul V. Makarov 4 1 Irkutsk State
Dynamics of assembled structures of rotor systems of aviation gas turbine engines of type two-rotor Anatoly А. Pykhalov 1, Mikhail А. Dudaev 2, Mikhail Ye. Kolotnikov 3, Paul V. Makarov 4 1 Irkutsk State
Analysis and Calculation of Double Circular Arc Gear Meshing Impact Model
 Send Orders for Reprints to reprints@benthamscienceae 160 The Open Mechanical Engineering Journal, 015, 9, 160-167 Open Access Analysis and Calculation of Double Circular Arc Gear Meshing Impact Model
Send Orders for Reprints to reprints@benthamscienceae 160 The Open Mechanical Engineering Journal, 015, 9, 160-167 Open Access Analysis and Calculation of Double Circular Arc Gear Meshing Impact Model
WEEK 1 Dynamics of Machinery
 WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
Introduction to Vibration. Professor Mike Brennan
 Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
Dynamic Modeling of Fixed-Wing UAVs
 Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Dynamic analysis of pitman and wobble shaft drive mechanisms; consideration of the harvesting losses in the combine platform
 Journal of Agricultural Technology Dynamic analysis of pitman and wobble shaft drive mechanisms; consideration of the harvesting losses in the combine platform A. Rajabipour, M. Ayazi, F. Khoshnam, H.
Journal of Agricultural Technology Dynamic analysis of pitman and wobble shaft drive mechanisms; consideration of the harvesting losses in the combine platform A. Rajabipour, M. Ayazi, F. Khoshnam, H.
CHAPTER 2 ANALYSIS OF SIMPLE ROTOR SYSTEMS
 CHAPTER ANALYSIS OF SIMPLE ROTOR SYSTEMS In previous chapter, a brief history and recent trends in the subject of rotor dynamics has been outlined. The main objective of the previous chapter was to have
CHAPTER ANALYSIS OF SIMPLE ROTOR SYSTEMS In previous chapter, a brief history and recent trends in the subject of rotor dynamics has been outlined. The main objective of the previous chapter was to have