TOWARDS A BENCHMARKING OF MICROSCOPIC TRAFFIC FLOW MODELS
|
|
|
- Marylou Fowler
- 5 years ago
- Views:
Transcription
1 TOWARDS A BENCHMARKING OF MICROSCOPIC TRAFFIC FLOW MODELS Elmar Brockfeld, Institute of Transport Research, German Aerospace Centre Rutherfordstrasse 2, Berlin, Germany phone: , fax: elmar.brockfeld@dlr.de Reinhart D. Kühne Institute of Transport Research, German Aerospace Centre Rutherfordstrasse 2, Berlin, Germany phone: , fax: reinhart.kuehne@dlr.de Alexander Skabardonis Institute of Transportation Studies University of California, Berkeley CA phone: (510) , fax: (510) skabardonis@uclink4.berkeley.edu Peter Wagner * Institute of Transport Research, German Aerospace Centre Rutherfordstrasse 2, Berlin, Germany phone: , fax: peter.wagner@dlr.de No WORDS: 4,071 Plus 4 Figures (1,000) Plus 1 Table (250) TOTAL: 5,321 *Corresponding Author For Presentation and Publication 82 nd Annual Meeting Transportation Research Board January 2003 Washington, D.C. August 1, 2002
2 Brockfeld/Kühne/Skabardonis/Wagner 1 ABSTRACT Several microscopic traffic flow models have been tested with a publicly available data set. The task was to predict the travel times between several observers along a one-lane rural road, given as boundary conditions the flow into this road and the flow out of it. By using nonlinear optimization, for each of the models the best matching set of parameters have been estimated. For this particular data set, the models that performed best are the ones with the smallest number of parameters. The average error rate of the best models is about 16%, however, this value is not very reliable: the error rate fluctuates between 2.5 and 25% for different parts of the data set.
3 Brockfeld/Kühne/Skabardonis/Wagner 2 INTRODUCTION Right now, according to recent counts, up to one hundred different microscopic simulation models are known, see e.g., (1,2,3,4) for reviews. The fact, that these models belong to different scientific communities, that seem barely take any notice of each other, makes the situation even more confusing. The most prominent contributors to (not only microscopic) models of traffic flow are of course the traffic engineers and the physicists. What is missing in our opinion is some common idea about the worth of this plethora of models. I.e. one would like to know which model is the best for my application. Therefore, a benchmarking of these models is called for. The work presented here is a first step of a long-term research project to provide such a benchmark for microscopic traffic flow models, with the ultimate goal to reduce the above-mentioned number considerably. For more details, see (5). To develop a commonly accepted benchmark, three things are needed: 1. a computer-implementable public description of the models, 2. publicly available data sets so that other groups are able to reproduce the benchmarks, 3. different combinations of testing algorithms and data sets that finally add up to provide such a benchmark. The work here is mainly about issues one and the first steps into three. Section 2 of the paper describes the methodology for testing the simulation models. A brief description of the selected models is given in Section 3. The database and application of the models is described in Section 4. The results are presented in Section 5. The last section summarizes the study findings. METHODOLOGY FOR MODELS TESTING The models this text is concerned with can be classified roughly as belonging to one of the following groups: cellular automata (discrete space, discrete time), mathematical maps (continuous space, discrete time), ordinary or delay differential equations (anything continuous) and mesoscopic models. An example for a mesoscopic model is the queueing model, described in Section 3. What seems much more interesting, but in a certain sense is still missing, would be a classification according to behavior, i.e., according to the macroscopic features a certain model displays. In general, any microscopic simulation model is defined by a set of equations (for step size h going to zero, a differential equation results): v( t + h) = f ( g( t), v( t), v~ ( t), ξ ( t); p), x( t + h) = x( t) + v( t) h. (1)
4 Brockfeld/Kühne/Skabardonis/Wagner 3 Here, x( t), v( t) are the position and velocity of a following car, and ~ x( t), v~ ( t ) are the position and velocity of the leading car, respectively. The variable g ( t) = ~ x ( t) x( t) is the free space in front of the following car ( is the length of a car). The noise term ξ (t) need not be white noise, and p is a set of parameters, that allows adapting the model to varying circumstances. The equations (1) above are written very generally, the left-hand side is meant as the time update of the current system-state no matter to which class the model belongs. Given a certain data set, the objective is to determine the set of parameters that best fit the data set. This can be done as follows: a) choosing a certain error measure e(p) for instance the mean absolute error for any system observable performance metric T (e.g., travel time on a highway section): Tsim ( p) Tobs e( p) =, (2) T obs b) run a simulation of the model with a certain set of parameters, and c) use an algorithm to improve e by changing the set of parameters p. Usually, those models are very hard to analyze analytically, ruling out the possibility of computing the Jacobi-matrix with respect to the parameters, therefore a so-called direct search approach is needed (7,8,9,10). Direct-search methods work without the need to compute derivatives or the need of an explicit analytical formulation of the system to be optimized, a computer implementation will do. A detailed description of these methods is by far beyond the scope of this paper. For example, the method developed in (8) elaborates on the simple idea to compute a quadratic approximation to the function values found so far and using the minimum of this quadratic approximation as a guess for the next iteration. Differently from the more familiar gradient-based optimization algorithms, direct search methods initially need a simplex in the n-dimensional parameter space to get started. The above described non-linear optimization algorithms are not guaranteed to yield anything useful, since they can get stuck into a local minimum. For the examples considered in this work, however, they seem to work surprisingly good. (The usual precautions have to be taken: restart the algorithm after settling to a minimum; start from different initial conditions; for low dimensional optimization problems (small set of parameters) the parameter space can be searched and even visualized more or less thoroughly etc.) SELECTED MODELS The evaluation methodology was applied to test the following microscopic models, using a real-life data set (described in Section 4):
5 Brockfeld/Kühne/Skabardonis/Wagner 4 CA: Cellular automaton model (11) CT: Cell transmission model (12) as a reference model, FRITZ: Fritzsche model (13), which is the basis for the simulation software PARAMICS, GIPPS/SK: The Gipps model (14), and a variant of it from the physics community (15); this model is the basis of the model used in the simulator AIMSUN2, IDM: the intelligent driver model (16), again from the physics community, OVM: the optimal velocity model (17,18), uqueue: a queueing model, again for reference reasons, MITSIM: MITSim-Model as described in (6) which in parts can be understood as an implementation of the classic car following family of models (19), INT: the model used in the simulation package INTEGRATION (20), VDR++/caSync: two recent members of CA family, the so called VDR-model (21) and a recent version (22), both of them claim to describe what is know as synchronized traffic flow. Table 1 provides basic information about each model. Practically all the models have a two parameters in common, the imum speed v and the generalized length of a vehicle, that is the length of the vehicle plus the minimum distance a driver keeps to the car in front when standing in a jam (which defines the jam density.) Some other commonly used parameters are the imum acceleration and deceleration rates a, b respectively, the reaction time τ and the strength ε of the noise for the stochastic models. The models that use a partitioning of space have as an additional parameter the cell size λ. Not exactly a parameter, the step-size h is usually needed. For the CASYNC, FRITZ, MitSim and VDR++ models, not all parameters are listed, which is indicated by dots in the corresponding entry of the list. Note also that several of the models include so-called hidden parameters. For example, the reaction time of drivers is simply set to one second. Then the authors forget about this parameter, it does not enter the equations anymore. In the following, we tried to unearth and at least to mention those hidden parameters. Additional information about each model can be found in (5). A short description of some models in given below: Cell transmission (11) Intended as an approximation to the Lighthill Whitham theory of traffic flow, this model divides a road into small cells of length λ = h v. Then cars (or better occupancies, because it could be fractions of cars) are moved between the cells according to a very simple rule: δ n i i + 1) = min{ n, β ( N n )}. (3) ( i i+ 1
6 Brockfeld/Kühne/Skabardonis/Wagner 5 Here, δn( i i + 1) is the flow from cell i into cell i + 1, and N is the imum occupancy of a cell. In the implementation used in this work, all cells are alike. Of course, there is a relationship between N and the car length, leaving this model with the four parameters v, β = w / v, and the step size h. The parameter w is the speed of the backward running jam wave. The other parameters that have been obtained by this approach are given by v = 21 m / s, w = 4.5m / s, h = s, = 7. 6 m, which are comparable with results found in the literature, especially the speed of the backward running jam wave. This value could be improved slightly (<1%), if one allows for a fundamental diagram that depends on the state of the cell in front, at the cost of an additional parameter. Queueing model Models of this type are especially interesting, since they are the fastest known simulation models that still have individual cars where the cell transmission model described above is about densities. Hence, they provide an excellent tool for a couple of applications (like dynamic traffic assignment). They can be described as a mesoscopic model, comparable to what is used in the simulation package DYNEMO. Again, the road is divided into cells of size λ, where λ is about 100 m. Any cell can hold at most N cars and is organized as a firstin first-out priority queue. When a car enters such a cell, it gets assigned the exit time, which is its exit time t plus the minimum travel time, which is simply λ / v. After a car has left a cell, it has to be made sure, that the following car fulfills the flow constraint, i.e., whatever its exit time is, it is not allowed to leave before the time t + τ, where τ = 1 c with c as the ff ff / capacity of the cell. Furthermore, this waiting time may depend on the state of the next cell, it is set to the minimum of τ ff and ~ nτ jj. If the following cell is full, the car must stay in its cell. As mentioned above, this model is numerically very efficient, and its error rate is not much different from the model that performs best. Fritzsche model (13) Is included here as an example of a fairly complex model, featuring twelve parameters to fit. A variant of this model is being used with the simulation software PARAMICS, however, nothing is known about the difference between the published version and the version used in PARAMICS. The basic idea is to divide the ( v, g) car following plane into different regions, with different behaviors. The regions are called following I and II, emergency (the distance to the car ahead is too small, so try to brake as hard as possible), approaching and driving freely. It could be seen easily, that any line in this plane is described by at least two parameters, so one readily ends up with twelve parameters. Gipps model (14)/SK model (15) Again, this model is the basis of a commercially available simulation package, AIMSUN2. There are actually two versions of it, the original version of Gipps, for which some new
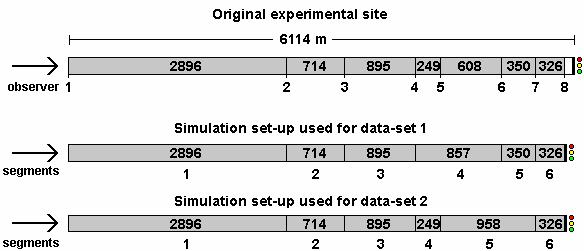
7 Brockfeld/Kühne/Skabardonis/Wagner 6 results are available (25), and a version that is used by the physics community. The latter (named SK thereafter) has been designed rigorously for speed and simplicity, and has been investigated very thoroughly. Both models formulation are based on the premise that the following condition must holds for safe car-following: d ( v) + vτ d( v ~ ) + g. (4) 2 Here, d(v) is the braking distance, for constant deceleration rate b it is just d ( v) = v /(2b). This equation has only two parameters, deceleration rate b, and reaction time τ. To make a microscopic simulation model the acceleration rate a and imum speed v are needed. The Gipps model has a more complicated acceleration equation and an additional safety factor, while the SK model adds a stochastic term with amplitude ε. DATA-SET USED AND IMPLEMENTATION ISSUES A unique data set recorded by Carlos Daganzo (23,24) and co-workers was used to evaluate the models. The data were obtained by observers along a four-mile (6.2 km) section of San Pablo Dam Road, a single lane highway in San Francisco Bay Area, California. Eight observers recorded the times each vehicle passed the observer location. Figure 1 shows the observer positions and segment numbering in the study section. At the end, 80 m behind the last observer, there was a traffic light. A special car provided the start of a sequence, thereby assigning a unique identification number to each vehicle. Provided the observers made no error, and there were no passing, then the cumulative N-curves of the eight observers contain all information needed, especially the travel times. There were two data sets for two different days, each recorded from about 7 a.m. to 9 a.m. and containing about 2,300 observations each. Unfortunately, no speeds have been recorded, however the models can cope with this omission surprisingly well. Figure 2 shows a plot of speeds as a function of space and time. The generation and final dissolution of the congested area in this system could be observed. While the actual traffic demand changes only slightly, the changes in the timing of the traffic signal cause the congested area finally to cover nearly all the 6.2 km of the study section. To facilitate the data processing and comparison with model predictions, we discarded the data of observer five on the first day, and of observer six on the second day, because there were big holes in those data sets. Figure 1 shows the simulation set up and segment numbering for each data set. Each microscopic simulation models was fed with the cars observed by the first observer. However, for some of the models this caused problems, because the data set contained very short headways. Therefore, we tried to insert the cars with the imum possible speed, allowing the car-following dynamics to take care of congested conditions inside the system. This means that the traces x( t), v( t), (if one could manage to compare them to the real ones),
8 Brockfeld/Kühne/Skabardonis/Wagner 7 are not correct for the first couple of meters. Still, some models needed more effort than others, and still there were some models where we could not manage to insert them smoothly into the system: they developed a jam right after the insertion, leading to large and unrealistic error measures. The outflow condition was handled as follows: a virtual traffic light is put at the position of the eighth observer, which is switched to green at a certain time if more observed cars than simulated cars are out of the system. Other, softer constraints have been tested as well, but do not give better results, so the simplest scheme has been used to enforce that roughly the same number of cars are in the system as in reality. Since all the models need a car in front, two schemes for providing such a lead car have been used. Either the car that just left the system is updated with the cars still in the system, but is not allowed to accelerate, or the speed of the car that just the system is set to imum speed. Different models perform differently i.e., some models perform better with the first rule, while others perform better with the second rule. Nevertheless, this procedure introduces errors, however, when looking at the errors of the models it could be seen, that this segment is not the worst of all the segments. The actual implementation of all these models took much longer than originally expected, since all of them need some hand crafting until they could finally be managed to run. This was also due to the hidden parameters included in several models. RESULTS For all the models, the simulated travel times per segment were extracted, and the error measure was calculated per Equation (2). Since the data set contains two days of data, any model could be fitted with the data from the first day, and run it with those parameters with the data of the second day (and vice versa). Interestingly, all models performed worse on the second day data, even when fitting the parameter with the second day, and then running the model on the first day, the error for the first day is smaller. Figure 3 shows the error in travel times on each segment. The distribution of the error along the six segments is similar for different models: they perform best for the first, forth and last segment and worst for the second, third and fifth segment. Further analyses have shown that the error is distributed in time also very in homogeneously, with errors between 2% and 30% for the same model. Up to now, we do not have any idea for this very peculiar type of pattern; however, we could not rule out that there are recording errors in the data set. An indication of this is visible already in Figure 2. It could be seen that the speed of some vehicles is about 40 m/s (100 mph), which is hardly possible on this road. However, that is not as bad as it sounds, because in reality data are never clean, so a model should have a certain kind of robustness against buggy data. Nevertheless, it is not completely clear, that the error found so far is the error in
9 Brockfeld/Kühne/Skabardonis/Wagner 8 the data itself, and therefore it s not that surprising, that the models all seem to perform almost identically. Figure 4 shows the average error across the study section for each model. The results are shown for each data set with the bet set of parameters. The best models give an average best error rate (meaning: picking the best value out of the four) of 15.5%. It s the IDM and the cell transmission model, followed by a group of models around 16-17% (OVM, SK, queuing model, Gipps). There is a group of models that stay well below 20% error, and another group of models that are above 20%. The difference between the top five models is hardly significant. Interestingly, the more complicated models seem to have worse performance. Also, adding parameters to the base model, e.g., hidden parameters in the SK and Gipps models did not improve the model performance. Of course it could not be ruled out that the weaker performance of the more complex models (e.g., the 12 parameter Fritzsche model with an average error of over 20%) is an artifact from the nonlinear optimization, which tends to get more difficult with higher dimensional spaces. Therefore, for some of the hard to fit models a simulated annealing technique has been tried, that has the merits of not getting stuck that easily in local minima. No significant differences in the outcome for the different optimization routines have been found. CONCLUSIONS These results are interesting. However, before final conclusions can be stated, a lot more work has to be done to confirm these results by using other data sets, which are currently performed. Unfortunately, since most data are from freeways, one has then to deal with lane changing matters, which easily could double the number of parameters that have to be fitted. This clearly suggests to strive for models with few parameters. We are very skeptical that models with 20 parameters can be fitted reliably to whatever data at hand, and it seems therefore interesting to think about models that have a chance of getting tested and falsified. Nevertheless, it is tempting to say at least (and at last) this: it is simple to invent a new model, but it is hard to see how good it compares to reality. This may be the reason, why we still have more models than results about them.
10 Brockfeld/Kühne/Skabardonis/Wagner 9 ACKNOWLEDGEMENTS Thanks are to Carlos Daganzo and his team for this data set, and for a lot of discussions during the stay of PW at the ITS of the UC Berkeley. Additionally, we would like to acknowledge discussions with Nils Eissfeldt, Boris Kerner, and Andreas Schadschneider.
11 Brockfeld/Kühne/Skabardonis/Wagner 10 REFERENCES 1. D. Chowdhury, L. Santen, and A. Schadschneider, Statistical Physics of Vehicular Traffic and Some Related Systems, Physics Reports 329, 199 (2000). [See also at arxiv.org/abs/cond-mat/ ] 2. D. Helbing, Traffic and Related Self-Driven Many-Particle Systems, Reviews of Modern Physics 73(4), (2001). [See also at arxiv.org/abs/cond-mat/ ] 3. Smartest, see 4. A. Skarbadonis, internal report, ITS of the UCB (1999). 5. Clearinghouse for data and models, see 6. Kazi Iftekhar Ahmed, Modeling Drivers Acceleration and Lane-Changing Behavior, Ph.D. thesis, MIT (1999). 7. W.H. Press, S.A. Teukolsky, W.T. Vetterling and B.P. Flannery, Numerical Recipes in C, chapter 10, Cambridge University Press and references therein (2002). 8. M.J.D. Powell, UOBYQA: unconstrained optimization by quadratic approximation, Report 2000/14, (2000). 9. M.J.D. Powell, A direct search optimization method that models the objective and constraint functions by linear interpolation, in S. Gomez and J.-P. Hennart (eds), Advances in Optimization and Numerical Analysis, Kluwer Avademic L. Ingber, Simulated annealing: Practice versus theory, Math. Comp. Modelling 18, (1993). 11. K. Nagel and M. Schreckenberg, J. Physique I, 2221, 2, C.F. Daganzo, The Cell transmission model: a simple dynamical representation of highway traffic, Transp. Res. B 28, (1994). 13. H.-T. Fritzsche, A model for traffic simulation, Transp. Engin. Contr. 5, (1994). 14. P.G. Gipps, A behavioral car following model for computer simulation, Transp. Res. B 15, (1981). 15. S. Krauss, P. Wagner, and C. Gawron, Metastable states in a microscopic model of traffic flow, Phys. Rev. E 55, (1997). 16. M Treiber, A Hennecke and D Helbing, Congested traffic states in empirical observation und numerical simulations, Physical Review E, , 62, G. Newell, Theories of instabilities in dense highway traffic, J. Op. Soc. Japan 5, 9 54 (1962). 18. M. Bando, K. Hasebe, A. Nakayama, A. Shibata, Y. Sugiyama, Dynamical model of traffic congestion and numerical simulation, Physical Review E, , 51, D.C. Gazis, R. Herman and E.W. Montroll, Non-linear follow-the-leader models of traffic flow, Oper. Res. 9, (1961). 20. Brent C. Crowther, A Comparison of CORSIM and INTEGRATION for the Modeling of Stationary Bottlenecks, Master thesis, Virginia Polytechnic Institute and State University (2001). 21. W. Knospe, L. Santen, A. Schadschneider and M. Schreckenberg, Towards a realistic microscopic description of highway traffic, J. Phys. A 33, L477 (2000). 22. B.S. Kerner, S.L. Klenov and D.E. Wolf, Cellular Automata approach to the three phase theory of traffic flow, preprint, See Karen R. Smilowitz & Carlos F. Daganzo, Experimental Verification of Time-Dependent Accumulation Predictions in Congested Traffic, Transportation Research Record 1710, (2000) 25. R.E. Wilson, An analysis of Gipps model of highway traffic, IMA J. Appl. Math. 66, (2001.) 26. G. Newell, A simplified car-following theory a lower order model, Transportation Research B 36, (2002).
12 Brockfeld/Kühne/Skabardonis/Wagner 11 LIST OF FIGURES Figure 1. The observer positions and the segment numbering used along San Pablo Dam Road. For the simulation, the real traffic light at the end has been replaced by a virtual traffic light at observer 8. Figure 2. The velocity plotted as function of space and time for the data set of the first day. To reduce noise, the speed data are filtered with a median filter: in a moving window of size 13, the medians of the speeds in this window have been plotted. Figure 3. Performance of the models per each study segment. Data and fitted parameters are from the first day. Figure 4. Comparison of the average errors in travel time for the models used in this study. LIST OF TABLES Table 1. Short description of the models used in this study.
13 Brockfeld/Kühne/Skabardonis/Wagner 12 FIGURE 1

14 Brockfeld/Kühne/Skabardonis/Wagner 13 FIGURE 2
15 Brockfeld/Kühne/Skabardonis/Wagner 14 FIGURE 3 error 40% 30% 20% 10% 0% segment number CA casync CT FRITZ Gipps IDM INT mitsim Newell OVM SK uqueue VDR++
16 Brockfeld/Kühne/Skabardonis/Wagner 15 FIGURE 4 30% 25% 20% 15% 10% day1, para1 day2, para1 day1, para2 day2, para2 5% 0% CA casync CT FRITZ Gipps IDM INT mitsim Newell OVM SK uqueue VDR++
17 Brockfeld/Kühne/Skabardonis/Wagner 16 Model (acronym) CA CASync TABLE 1 Type Equation (if not too complex) Parameters (n) Fully discrete v ' = min{ v + 1, g, v} ξ λ = 7.5m in the where ξ = {0,1} with ε original formulation Fully discrete, Model has following mode. λ = 0.5m Cars in following mode keep their distance. CT Fluid δ n i i + 1) = min{ n, β ( N n )} FRITZ Gipps IDM INT MitSim Newell (26) OVM SK uqueue VDR++ Differential equation/eventdriven Time discrete Differential equation Differential equation Differential equation Differential equation Differential equation Time discrete Mesoscopic Fully discrete λ = 1m ( i i+ 1 and v = b( τ / 2 + θ ) + 2 b ( τ / 2 + θ ) + b( v ~ 2 / bˆ + 2g vτ v ε Hidden parameters (h) # params (n + h) λ = v ε λ v,, w v' = min{ v, v2, v} v b 1, a, v v1 = aτ (1 ) v / v v τ,θ,bˆ 2 Cars try to reach the line g = c c3v + v c2 v Following car drives a shifted Trajectory of lead car. v = ( V ( g) v) / T where V ( g) = v v' = min{ v + a, v, v (tanh( a( g s))) + f } εξ where ξ [0,1] 2 and v b b v~ 2 = + + t wait 1 1 = min{ τ, n ff τ } i+ 1 jj + 2bg where ni + 1 is number of cars in next cell Cars react to brake light of the next two cars ahead λ, h v v, a, b τ, δ, g 0 v, a, b 1 c2, c, c v ε v a, d, τ, T v, a, s, T f is function of v, a, s v a b ε τ v,τ, τ jj ff λ, h v ε λ 6 + 2
Spontaneous Jam Formation
 Highway Traffic Introduction Traffic = macroscopic system of interacting particles (driven or self-driven) Nonequilibrium physics: Driven systems far from equilibrium Collective phenomena physics! Empirical
Highway Traffic Introduction Traffic = macroscopic system of interacting particles (driven or self-driven) Nonequilibrium physics: Driven systems far from equilibrium Collective phenomena physics! Empirical
Proceedings of the 2012 Winter Simulation Conference C. Laroque, J. Himmelspach, R. Pasupathy, O. Rose, and A. M. Uhrmacher, eds.
 Proceedings of the 2012 Winter Simulation Conference C. Laroque, J. Himmelspach, R. Pasupathy, O. Rose, and A. M. Uhrmacher, eds. CALIBRATION OF CAR-FOLLOWING MODELS WITH SINGLE- AND MULTI-STEP APPROACHES
Proceedings of the 2012 Winter Simulation Conference C. Laroque, J. Himmelspach, R. Pasupathy, O. Rose, and A. M. Uhrmacher, eds. CALIBRATION OF CAR-FOLLOWING MODELS WITH SINGLE- AND MULTI-STEP APPROACHES
THE EXACTLY SOLVABLE SIMPLEST MODEL FOR QUEUE DYNAMICS
 DPNU-96-31 June 1996 THE EXACTLY SOLVABLE SIMPLEST MODEL FOR QUEUE DYNAMICS arxiv:patt-sol/9606001v1 7 Jun 1996 Yūki Sugiyama Division of Mathematical Science City College of Mie, Tsu, Mie 514-01 Hiroyasu
DPNU-96-31 June 1996 THE EXACTLY SOLVABLE SIMPLEST MODEL FOR QUEUE DYNAMICS arxiv:patt-sol/9606001v1 7 Jun 1996 Yūki Sugiyama Division of Mathematical Science City College of Mie, Tsu, Mie 514-01 Hiroyasu
arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003
![arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003](/thumbs/80/81188192.jpg "arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003") arxiv:cond-mat/0211684v3 [cond-mat.stat-mech] 18 Aug 2003 Three-Phase Traffic Theory and Highway Capacity Abstract Boris S. Kerner Daimler Chrysler AG, RIC/TS, T729, 70546 Stuttgart, Germany Hypotheses
arxiv:cond-mat/0211684v3 [cond-mat.stat-mech] 18 Aug 2003 Three-Phase Traffic Theory and Highway Capacity Abstract Boris S. Kerner Daimler Chrysler AG, RIC/TS, T729, 70546 Stuttgart, Germany Hypotheses
Modelling and Simulation for Train Movement Control Using Car-Following Strategy
 Commun. Theor. Phys. 55 (2011) 29 34 Vol. 55, No. 1, January 15, 2011 Modelling and Simulation for Train Movement Control Using Car-Following Strategy LI Ke-Ping (Ó ), GAO Zi-You (Ô Ð), and TANG Tao (»
Commun. Theor. Phys. 55 (2011) 29 34 Vol. 55, No. 1, January 15, 2011 Modelling and Simulation for Train Movement Control Using Car-Following Strategy LI Ke-Ping (Ó ), GAO Zi-You (Ô Ð), and TANG Tao (»
Traffic Modelling for Moving-Block Train Control System
 Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
Emergence of traffic jams in high-density environments
 Emergence of traffic jams in high-density environments Bill Rose 12/19/2012 Physics 569: Emergent States of Matter Phantom traffic jams, those that have no apparent cause, can arise as an emergent phenomenon
Emergence of traffic jams in high-density environments Bill Rose 12/19/2012 Physics 569: Emergent States of Matter Phantom traffic jams, those that have no apparent cause, can arise as an emergent phenomenon
An Improved Car-Following Model for Multiphase Vehicular Traffic Flow and Numerical Tests
 Commun. Theor. Phys. (Beijing, China) 46 (2006) pp. 367 373 c International Academic Publishers Vol. 46, No. 2, August 15, 2006 An Improved Car-Following Model for Multiphase Vehicular Traffic Flow and
Commun. Theor. Phys. (Beijing, China) 46 (2006) pp. 367 373 c International Academic Publishers Vol. 46, No. 2, August 15, 2006 An Improved Car-Following Model for Multiphase Vehicular Traffic Flow and
An improved CA model with anticipation for one-lane traffic flow
 An improved CA model with anticipation for one-lane traffic flow MARÍA ELENA. LÁRRAGA JESÚS ANTONIO DEL RÍ0 Facultad de Ciencias, Computer Science Dept. Universidad Autónoma del Estado de Morelos Av. Universidad
An improved CA model with anticipation for one-lane traffic flow MARÍA ELENA. LÁRRAGA JESÚS ANTONIO DEL RÍ0 Facultad de Ciencias, Computer Science Dept. Universidad Autónoma del Estado de Morelos Av. Universidad
Car-Following Parameters by Means of Cellular Automata in the Case of Evacuation
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/228528638 Car-Following Parameters by Means of Cellular Automata in the Case of Evacuation
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/228528638 Car-Following Parameters by Means of Cellular Automata in the Case of Evacuation
STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS
 STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS H. Lenz, R. Sollacher *, M. Lang + Siemens AG, Corporate Technology, Information and Communications, Otto-Hahn-Ring 6, 8173 Munich, Germany fax: ++49/89/636-49767
STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS H. Lenz, R. Sollacher *, M. Lang + Siemens AG, Corporate Technology, Information and Communications, Otto-Hahn-Ring 6, 8173 Munich, Germany fax: ++49/89/636-49767
Nonlinear Analysis of a New Car-Following Model Based on Internet-Connected Vehicles
 Nonlinear Analysis of a New Car-Following Model Based on Internet-Connected Vehicles Lei Yu1*, Bingchang Zhou, Zhongke Shi1 1 College School of Automation, Northwestern Polytechnical University, Xi'an,
Nonlinear Analysis of a New Car-Following Model Based on Internet-Connected Vehicles Lei Yu1*, Bingchang Zhou, Zhongke Shi1 1 College School of Automation, Northwestern Polytechnical University, Xi'an,
Cellular-automaton model with velocity adaptation in the framework of Kerner s three-phase traffic theory
 Cellular-automaton model with velocity adaptation in the framework of Kerner s three-phase traffic theory Kun Gao, 1, * Rui Jiang, 2, Shou-Xin Hu, 3 Bing-Hong Wang, 1, and Qing-Song Wu 2 1 Nonlinear Science
Cellular-automaton model with velocity adaptation in the framework of Kerner s three-phase traffic theory Kun Gao, 1, * Rui Jiang, 2, Shou-Xin Hu, 3 Bing-Hong Wang, 1, and Qing-Song Wu 2 1 Nonlinear Science
Recent Researches in Engineering and Automatic Control
 Traffic Flow Problem Simulation in Jordan Abdul Hai Alami Mechanical Engineering Higher Colleges of Technology 17155 Al Ain United Arab Emirates abdul.alami@hct.ac.ae http://sites.google.com/site/alamihu
Traffic Flow Problem Simulation in Jordan Abdul Hai Alami Mechanical Engineering Higher Colleges of Technology 17155 Al Ain United Arab Emirates abdul.alami@hct.ac.ae http://sites.google.com/site/alamihu
On some experimental features of car-following behavior and
 On some experimental features of car-following behavior and how to model them Rui Jiang 1,2, Mao-Bin Hu 2, H.M.Zhang 3,4, Zi-You Gao 1, Bin Jia 1, Qing-Song Wu 2 1 MOE Key Laboratory for Urban Transportation
On some experimental features of car-following behavior and how to model them Rui Jiang 1,2, Mao-Bin Hu 2, H.M.Zhang 3,4, Zi-You Gao 1, Bin Jia 1, Qing-Song Wu 2 1 MOE Key Laboratory for Urban Transportation
CHALLENGES IN APPLYING CALIBRATION METHODS TO TRAFFIC MODELS
 CHALLENGES IN APPLYING CALIBRATION METHODS TO TRAFFIC MODELS Peter Wagner German Aerospace Center (DLR) Institute of Transportation Systems Rutherfordstrasse, Berlin, Germany Phone: + 0 0 e, Fax: + 0 0
CHALLENGES IN APPLYING CALIBRATION METHODS TO TRAFFIC MODELS Peter Wagner German Aerospace Center (DLR) Institute of Transportation Systems Rutherfordstrasse, Berlin, Germany Phone: + 0 0 e, Fax: + 0 0
CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW
 CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW ENDAR H. NUGRAHANI, RISWAN RAMDHANI Department of Mathematics, Faculty of Mathematics and Natural Sciences, Bogor
CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW ENDAR H. NUGRAHANI, RISWAN RAMDHANI Department of Mathematics, Faculty of Mathematics and Natural Sciences, Bogor
An extended microscopic traffic flow model based on the spring-mass system theory
 Modern Physics Letters B Vol. 31, No. 9 (2017) 1750090 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0217984917500907 An extended microscopic traffic flow model based on the spring-mass
Modern Physics Letters B Vol. 31, No. 9 (2017) 1750090 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0217984917500907 An extended microscopic traffic flow model based on the spring-mass
Transient situations in traffic flow: Modelling the Mexico City Cuernavaca Highway
 arxiv:cond-mat/0501561v1 [cond-mat.other] 24 Jan 2005 Transient situations in traffic flow: Modelling the Mexico City Cuernavaca Highway J.A. del Río Centro de Investigación en Energía Universidad Nacional
arxiv:cond-mat/0501561v1 [cond-mat.other] 24 Jan 2005 Transient situations in traffic flow: Modelling the Mexico City Cuernavaca Highway J.A. del Río Centro de Investigación en Energía Universidad Nacional
Vehicular Traffic: A Forefront Socio-Quantitative Complex System
 Vehicular Traffic: A Forefront Socio-Quantitative Complex System Jaron T. Krogel 6 December 2007 Abstract We present the motivation for studying traffic systems from a physical perspective. We proceed
Vehicular Traffic: A Forefront Socio-Quantitative Complex System Jaron T. Krogel 6 December 2007 Abstract We present the motivation for studying traffic systems from a physical perspective. We proceed
Modeling and simulation of highway traffic using a cellular automaton approach
 U.U.D.M. Project Report 2011:25 Modeling and simulation of highway traffic using a cellular automaton approach Ding Ding Examensarbete i matematik, 30 hp Handledare och examinator: Ingemar Kaj December
U.U.D.M. Project Report 2011:25 Modeling and simulation of highway traffic using a cellular automaton approach Ding Ding Examensarbete i matematik, 30 hp Handledare och examinator: Ingemar Kaj December
The Effect of off-ramp on the one-dimensional cellular automaton traffic flow with open boundaries
 arxiv:cond-mat/0310051v3 [cond-mat.stat-mech] 15 Jun 2004 The Effect of off-ramp on the one-dimensional cellular automaton traffic flow with open boundaries Hamid Ez-Zahraouy, Zoubir Benrihane, Abdelilah
arxiv:cond-mat/0310051v3 [cond-mat.stat-mech] 15 Jun 2004 The Effect of off-ramp on the one-dimensional cellular automaton traffic flow with open boundaries Hamid Ez-Zahraouy, Zoubir Benrihane, Abdelilah
arxiv:cond-mat/ v1 [cond-mat.stat-mech] 28 Nov 2001
![arxiv:cond-mat/ v1 [cond-mat.stat-mech] 28 Nov 2001](/thumbs/79/79914591.jpg "arxiv:cond-mat/ v1 [cond-mat.stat-mech] 28 Nov 2001") arxiv:cond-mat/0111535v1 [cond-mat.stat-mech] 28 Nov 2001 Localized defects in a cellular automaton model for traffic flow with phase separation A. Pottmeier a, R. Barlovic a, W. Knospe a, A. Schadschneider
arxiv:cond-mat/0111535v1 [cond-mat.stat-mech] 28 Nov 2001 Localized defects in a cellular automaton model for traffic flow with phase separation A. Pottmeier a, R. Barlovic a, W. Knospe a, A. Schadschneider
arxiv: v1 [physics.soc-ph] 17 Oct 2016
![arxiv: v1 [physics.soc-ph] 17 Oct 2016](/thumbs/90/102622259.jpg "arxiv: v1 [physics.soc-ph] 17 Oct 2016") Local stability conditions and calibrating procedure for new car-following models used in driving simulators arxiv:1610.05257v1 [physics.soc-ph] 17 Oct 2016 Valentina Kurc and Igor Anufriev Abstract The
Local stability conditions and calibrating procedure for new car-following models used in driving simulators arxiv:1610.05257v1 [physics.soc-ph] 17 Oct 2016 Valentina Kurc and Igor Anufriev Abstract The
Improved 2D Intelligent Driver Model simulating synchronized flow and evolution concavity in traffic flow
 Improved 2D Intelligent Driver Model simulating synchronized flow and evolution concavity in traffic flow Junfang Tian 1 *, Rui Jiang 2, Geng Li 1 *Martin Treiber 3 Chenqiang Zhu 1, Bin Jia 2 1 Institute
Improved 2D Intelligent Driver Model simulating synchronized flow and evolution concavity in traffic flow Junfang Tian 1 *, Rui Jiang 2, Geng Li 1 *Martin Treiber 3 Chenqiang Zhu 1, Bin Jia 2 1 Institute
How reaction time, update time and adaptation time influence the stability of traffic flow
 How reaction time, update time and adaptation time influence the stability of traffic flow Arne Kesting and Martin Treiber Technische Universität Dresden, Andreas-Schubert-Straße 3, 16 Dresden, Germany
How reaction time, update time and adaptation time influence the stability of traffic flow Arne Kesting and Martin Treiber Technische Universität Dresden, Andreas-Schubert-Straße 3, 16 Dresden, Germany
Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions
 Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions Shin-ichi Tadaki 1,, Macoto Kikuchi 2,, Yuki Sugiyama 3,, and Satoshi Yukawa 4, 1 Department of Information Science, Saga University,
Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions Shin-ichi Tadaki 1,, Macoto Kikuchi 2,, Yuki Sugiyama 3,, and Satoshi Yukawa 4, 1 Department of Information Science, Saga University,
Characteristics of vehicular traffic flow at a roundabout
 PHYSICAL REVIEW E 70, 046132 (2004) Characteristics of vehicular traffic flow at a roundabout M. Ebrahim Fouladvand, Zeinab Sadjadi, and M. Reza Shaebani Department of Physics, Zanjan University, P.O.
PHYSICAL REVIEW E 70, 046132 (2004) Characteristics of vehicular traffic flow at a roundabout M. Ebrahim Fouladvand, Zeinab Sadjadi, and M. Reza Shaebani Department of Physics, Zanjan University, P.O.
The Physics of Traffic Jams: Emergent Properties of Vehicular Congestion
 December 10 2008 David Zeb Rocklin The Physics of Traffic Jams: Emergent Properties of Vehicular Congestion The application of methodology from statistical physics to the flow of vehicles on public roadways
December 10 2008 David Zeb Rocklin The Physics of Traffic Jams: Emergent Properties of Vehicular Congestion The application of methodology from statistical physics to the flow of vehicles on public roadways
A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE
 International Journal of Modern Physics C Vol. 20, No. 5 (2009) 711 719 c World Scientific Publishing Company A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE C. Q. MEI,,
International Journal of Modern Physics C Vol. 20, No. 5 (2009) 711 719 c World Scientific Publishing Company A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE C. Q. MEI,,
Modelling, Simulation & Computing Laboratory (msclab) Faculty of Engineering, Universiti Malaysia Sabah, Malaysia
 Faculty of Engineering, Universiti Malaysia Sabah, Malaysia") 1.0 Introduction Intelligent Transportation Systems (ITS) Long term congestion solutions Advanced technologies Facilitate complex transportation systems Dynamic Modelling of transportation (on-road traffic):
1.0 Introduction Intelligent Transportation Systems (ITS) Long term congestion solutions Advanced technologies Facilitate complex transportation systems Dynamic Modelling of transportation (on-road traffic):
An overview of microscopic and macroscopic traffic models
 faculteit Wiskunde en Natuurwetenschappen An overview of microscopic and macroscopic traffic models Bacheloronderzoek Technische Wiskunde Juli 2013 Student: J. Popping Eerste Begeleider: prof. dr. A.J.
faculteit Wiskunde en Natuurwetenschappen An overview of microscopic and macroscopic traffic models Bacheloronderzoek Technische Wiskunde Juli 2013 Student: J. Popping Eerste Begeleider: prof. dr. A.J.
VEHICULAR TRAFFIC FLOW MODELS
 BBCR Group meeting Fri. 25 th Nov, 2011 VEHICULAR TRAFFIC FLOW MODELS AN OVERVIEW Khadige Abboud Outline Introduction VANETs Why we need to know traffic flow theories Traffic flow models Microscopic Macroscopic
BBCR Group meeting Fri. 25 th Nov, 2011 VEHICULAR TRAFFIC FLOW MODELS AN OVERVIEW Khadige Abboud Outline Introduction VANETs Why we need to know traffic flow theories Traffic flow models Microscopic Macroscopic
Calibrating Car-Following Models using Trajectory Data: Methodological Study
 arxiv:83.463v1 [physics.soc-ph] 28 Mar 28 Calibrating Car-Following Models using Trajectory Data: Methodological Study Arne Kesting 1 and Martin Treiber 2 Institute for Transport & Economics Technische
arxiv:83.463v1 [physics.soc-ph] 28 Mar 28 Calibrating Car-Following Models using Trajectory Data: Methodological Study Arne Kesting 1 and Martin Treiber 2 Institute for Transport & Economics Technische
Phase transitions of traffic flow. Abstract
 Phase transitions of traffic flow Agustinus Peter Sahanggamu Department of Physics, University of Illinois at Urbana-Champaign (Dated: May 13, 2010) Abstract This essay introduces a basic model for a traffic
Phase transitions of traffic flow Agustinus Peter Sahanggamu Department of Physics, University of Illinois at Urbana-Champaign (Dated: May 13, 2010) Abstract This essay introduces a basic model for a traffic
Analytical investigation on the minimum traffic delay at a two-phase. intersection considering the dynamical evolution process of queues
 Analytical investigation on the minimum traffic delay at a two-phase intersection considering the dynamical evolution process of queues Hong-Ze Zhang 1, Rui Jiang 1,2, Mao-Bin Hu 1, Bin Jia 2 1 School
Analytical investigation on the minimum traffic delay at a two-phase intersection considering the dynamical evolution process of queues Hong-Ze Zhang 1, Rui Jiang 1,2, Mao-Bin Hu 1, Bin Jia 2 1 School
Macroscopic Simulation of Open Systems and Micro-Macro Link
 Macroscopic Simulation of Open Systems and Micro-Macro Link Ansgar Hennecke 1 and Martin Treiber 1 and Dirk Helbing 1 II Institute for Theoretical Physics, University Stuttgart, Pfaffenwaldring 57, D-7756
Macroscopic Simulation of Open Systems and Micro-Macro Link Ansgar Hennecke 1 and Martin Treiber 1 and Dirk Helbing 1 II Institute for Theoretical Physics, University Stuttgart, Pfaffenwaldring 57, D-7756
Efficiency promotion for an on-ramp system based on intelligent transportation system information
 Efficiency promotion for an on-ramp system based on intelligent transportation system information Xie Dong-Fan( 谢东繁 ), Gao Zi-You( 高自友 ), and Zhao Xiao-Mei( 赵小梅 ) School of Traffic and Transportation,
Efficiency promotion for an on-ramp system based on intelligent transportation system information Xie Dong-Fan( 谢东繁 ), Gao Zi-You( 高自友 ), and Zhao Xiao-Mei( 赵小梅 ) School of Traffic and Transportation,
An Interruption in the Highway: New Approach to Modeling Car Traffic
 An Interruption in the Highway: New Approach to Modeling Car Traffic Amin Rezaeezadeh * Physics Department Sharif University of Technology Tehran, Iran Received: February 17, 2010 Accepted: February 9,
An Interruption in the Highway: New Approach to Modeling Car Traffic Amin Rezaeezadeh * Physics Department Sharif University of Technology Tehran, Iran Received: February 17, 2010 Accepted: February 9,
A weighted mean velocity feedback strategy in intelligent two-route traffic systems
 A weighted mean velocity feedback strategy in intelligent two-route traffic systems Xiang Zheng-Tao( 向郑涛 ) and Xiong Li( 熊励 ) School of Management, Shanghai University, Shanghai 200444, China (Received
A weighted mean velocity feedback strategy in intelligent two-route traffic systems Xiang Zheng-Tao( 向郑涛 ) and Xiong Li( 熊励 ) School of Management, Shanghai University, Shanghai 200444, China (Received
Available online at ScienceDirect. Transportation Research Procedia 2 (2014 )
") Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 2 (2014 ) 400 405 The Conference on in Pedestrian and Evacuation Dynamics 2014 (PED2014) Stochastic headway dependent
Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 2 (2014 ) 400 405 The Conference on in Pedestrian and Evacuation Dynamics 2014 (PED2014) Stochastic headway dependent
Interactive Traffic Simulation
 Interactive Traffic Simulation Microscopic Open-Source Simulation Software in Javascript Martin Treiber and Arne Kesting July 2017 Traffic and congestion phenomena belong to our everyday experience. Our
Interactive Traffic Simulation Microscopic Open-Source Simulation Software in Javascript Martin Treiber and Arne Kesting July 2017 Traffic and congestion phenomena belong to our everyday experience. Our
arxiv: v6 [physics.soc-ph] 24 Dec 2010
![arxiv: v6 [physics.soc-ph] 24 Dec 2010](/thumbs/87/95852047.jpg "arxiv: v6 [physics.soc-ph] 24 Dec 2010") Traffic Network Optimum Principle Minimum Probability of Congestion Occurrence Boris S. Kerner 1 1 Daimler AG, GR/PTF, HPC: G021, 71059 Sindelfingen, Germany arxiv:1010.5747v6 [physics.soc-ph] 24 Dec 2010
Traffic Network Optimum Principle Minimum Probability of Congestion Occurrence Boris S. Kerner 1 1 Daimler AG, GR/PTF, HPC: G021, 71059 Sindelfingen, Germany arxiv:1010.5747v6 [physics.soc-ph] 24 Dec 2010
Advanced information feedback strategy in intelligent two-route traffic flow systems
 . RESEARCH PAPERS. SCIENCE CHINA Information Sciences November 2010 Vol. 53 No. 11: 2265 2271 doi: 10.1007/s11432-010-4070-1 Advanced information feedback strategy in intelligent two-route traffic flow
. RESEARCH PAPERS. SCIENCE CHINA Information Sciences November 2010 Vol. 53 No. 11: 2265 2271 doi: 10.1007/s11432-010-4070-1 Advanced information feedback strategy in intelligent two-route traffic flow
Critical Density of Experimental Traffic Jam
 Critical Density of Experimental Traffic Jam Shin-ichi Tadaki, Macoto Kikuchi, Minoru Fukui, Akihiro Nakayama, Katsuhiro Nishinari, Akihiro Shibata, Yuki Sugiyama, Taturu Yosida, and Satoshi Yukawa Abstract
Critical Density of Experimental Traffic Jam Shin-ichi Tadaki, Macoto Kikuchi, Minoru Fukui, Akihiro Nakayama, Katsuhiro Nishinari, Akihiro Shibata, Yuki Sugiyama, Taturu Yosida, and Satoshi Yukawa Abstract
Assessing the uncertainty in micro-simulation model outputs
 Assessing the uncertainty in micro-simulation model outputs S. Zhu 1 and L. Ferreira 2 1 School of Civil Engineering, Faculty of Engineering, Architecture and Information Technology, The University of
Assessing the uncertainty in micro-simulation model outputs S. Zhu 1 and L. Ferreira 2 1 School of Civil Engineering, Faculty of Engineering, Architecture and Information Technology, The University of
An Interruption in the Highway: New Approach to Modeling the Car-Traffic
 EJTP 7, No. 23 (21) 123 136 Electronic Journal of Theoretical Physics An Interruption in the Highway: New Approach to Modeling the Car-Traffic Amin Rezaeezadeh Electrical Engineering Department, Sharif
EJTP 7, No. 23 (21) 123 136 Electronic Journal of Theoretical Physics An Interruption in the Highway: New Approach to Modeling the Car-Traffic Amin Rezaeezadeh Electrical Engineering Department, Sharif
Introduction. Pedestrian dynamics more complex than vehicular traffic: motion is 2-dimensional counterflow interactions longer-ranged
 Pedestrian Dynamics Introduction Pedestrian dynamics more complex than vehicular traffic: motion is 2-dimensional counterflow interactions longer-ranged Empirics Collective phenomena jamming or clogging
Pedestrian Dynamics Introduction Pedestrian dynamics more complex than vehicular traffic: motion is 2-dimensional counterflow interactions longer-ranged Empirics Collective phenomena jamming or clogging
arxiv:cond-mat/ v3 [cond-mat.soft] 3 May 2005
![arxiv:cond-mat/ v3 [cond-mat.soft] 3 May 2005](/thumbs/78/76989919.jpg "arxiv:cond-mat/ v3 [cond-mat.soft] 3 May 2005") Delays, Inaccuracies and Anticipation in Microscopic Traffic Models arxiv:cond-mat/0404736v3 [cond-mat.soft] 3 May 2005 Abstract Martin Treiber, Arne Kesting, Dirk Helbing Institute for Transport & Economics,
Delays, Inaccuracies and Anticipation in Microscopic Traffic Models arxiv:cond-mat/0404736v3 [cond-mat.soft] 3 May 2005 Abstract Martin Treiber, Arne Kesting, Dirk Helbing Institute for Transport & Economics,
Empirical Study of Traffic Velocity Distribution and its Effect on VANETs Connectivity
 Empirical Study of Traffic Velocity Distribution and its Effect on VANETs Connectivity Sherif M. Abuelenin Department of Electrical Engineering Faculty of Engineering, Port-Said University Port-Fouad,
Empirical Study of Traffic Velocity Distribution and its Effect on VANETs Connectivity Sherif M. Abuelenin Department of Electrical Engineering Faculty of Engineering, Port-Said University Port-Fouad,
Cellular Automata Model of Self-organizing Traffic Control in Urban Networks
 Cellular Automata Model of Self-organizing Traffic Control in Urban Networks Jacek Szklarski February 23, 2010 Abstract A model of city traffic based on Nagel- Schreckenberg cellular automaton (CA) model
Cellular Automata Model of Self-organizing Traffic Control in Urban Networks Jacek Szklarski February 23, 2010 Abstract A model of city traffic based on Nagel- Schreckenberg cellular automaton (CA) model
Modeling Traffic Flow on Multi-Lane Road: Effects of Lane-Change Manoeuvres Due to an On-ramp
 Global Journal of Pure and Applied Mathematics. ISSN 973-768 Volume 4, Number 28, pp. 389 46 Research India Publications http://www.ripublication.com/gjpam.htm Modeling Traffic Flow on Multi-Lane Road:
Global Journal of Pure and Applied Mathematics. ISSN 973-768 Volume 4, Number 28, pp. 389 46 Research India Publications http://www.ripublication.com/gjpam.htm Modeling Traffic Flow on Multi-Lane Road:
nario is a hypothetical driving process aiming at testing these models under various driving regimes (such as free flow and car following); the
; the") 1 Preface For years, I have been thinking about writing an introductory book on traffic flow theory. The main purpose is to help readers like me who are new to this subject and do not have much preparation
1 Preface For years, I have been thinking about writing an introductory book on traffic flow theory. The main purpose is to help readers like me who are new to this subject and do not have much preparation
Hysteresis in traffic flow revisited: an improved measurement method
 Hysteresis in traffic flow revisited: an improved measurement method Jorge A. Laval a, a School of Civil and Environmental Engineering, Georgia Institute of Technology Abstract This paper presents a method
Hysteresis in traffic flow revisited: an improved measurement method Jorge A. Laval a, a School of Civil and Environmental Engineering, Georgia Institute of Technology Abstract This paper presents a method
Optimizing traffic flow on highway with three consecutive on-ramps
 2012 Fifth International Joint Conference on Computational Sciences and Optimization Optimizing traffic flow on highway with three consecutive on-ramps Lan Lin, Rui Jiang, Mao-Bin Hu, Qing-Song Wu School
2012 Fifth International Joint Conference on Computational Sciences and Optimization Optimizing traffic flow on highway with three consecutive on-ramps Lan Lin, Rui Jiang, Mao-Bin Hu, Qing-Song Wu School
A Cellular Automaton Model for Heterogeneous and Incosistent Driver Behavior in Urban Traffic
 Commun. Theor. Phys. 58 (202) 744 748 Vol. 58, No. 5, November 5, 202 A Cellular Automaton Model for Heterogeneous and Incosistent Driver Behavior in Urban Traffic LIU Ming-Zhe ( ), ZHAO Shi-Bo ( ô ),,
Commun. Theor. Phys. 58 (202) 744 748 Vol. 58, No. 5, November 5, 202 A Cellular Automaton Model for Heterogeneous and Incosistent Driver Behavior in Urban Traffic LIU Ming-Zhe ( ), ZHAO Shi-Bo ( ô ),,
Simulation study of traffic accidents in bidirectional traffic models
 arxiv:0905.4252v1 [physics.soc-ph] 26 May 2009 Simulation study of traffic accidents in bidirectional traffic models Najem Moussa Département de Mathématique et Informatique, Faculté des Sciences, B.P.
arxiv:0905.4252v1 [physics.soc-ph] 26 May 2009 Simulation study of traffic accidents in bidirectional traffic models Najem Moussa Département de Mathématique et Informatique, Faculté des Sciences, B.P.
c) What are cumulative curves, and how are they constructed? (1 pt) A count of the number of vehicles over time at one location (1).
 What are cumulative curves, and how are they constructed? (1 pt) A count of the number of vehicles over time at one location (1).") Exam 4821 Duration 3 hours. Points are indicated for each question. The exam has 5 questions 54 can be obtained. Note that half of the points is not always suffcient for a 6. Use your time wisely! Remarks:
Exam 4821 Duration 3 hours. Points are indicated for each question. The exam has 5 questions 54 can be obtained. Note that half of the points is not always suffcient for a 6. Use your time wisely! Remarks:
The German Autobahn: An ITS Test Bed for Examining Dynamic Traffic Flow Phenomena
 The German Autobahn: An ITS Test Bed for Examining Dynamic Traffic Flow Phenomena Robert L. Bertini, Roger V. Lindgren, Dirk Helbing and, Martin Schönhof Abstract Traffic conditions were examined along
The German Autobahn: An ITS Test Bed for Examining Dynamic Traffic Flow Phenomena Robert L. Bertini, Roger V. Lindgren, Dirk Helbing and, Martin Schönhof Abstract Traffic conditions were examined along
Non-Oscillatory Central Schemes for a Traffic Flow Model with Arrhenius Look-Ahead Dynamics
 Non-Oscillatory Central Schemes for a Traffic Flow Model with Arrhenius Look-Ahead Dynamics Alexander Kurganov and Anthony Polizzi Abstract We develop non-oscillatory central schemes for a traffic flow
Non-Oscillatory Central Schemes for a Traffic Flow Model with Arrhenius Look-Ahead Dynamics Alexander Kurganov and Anthony Polizzi Abstract We develop non-oscillatory central schemes for a traffic flow
A Unified Perspective on Traffic Flow Theory Part III: Validation and Benchmarking
 Applied Mathematical Sciences, Vol. 7, 2013, no. 40, 1965-1982 HIKARI Ltd, www.m-hikari.com A Unified Perspective on Traffic Flow Theory Part III: Validation and Benchmarking Daiheng Ni Department of Civil
Applied Mathematical Sciences, Vol. 7, 2013, no. 40, 1965-1982 HIKARI Ltd, www.m-hikari.com A Unified Perspective on Traffic Flow Theory Part III: Validation and Benchmarking Daiheng Ni Department of Civil
No. 11 Analysis of the stability and density waves for trafc flow 119 where the function f sti represents the response to the stimulus received by the
 Vol 11 No 11, November 00 cfl 00 Chin. Phys. Soc. 1009-196/00/11(11)/118-07 Chinese Physics and IOP Publishing Ltd Analysis of the stability and density waves for trafc flow * Xue Yu( ) Shanghai Institute
Vol 11 No 11, November 00 cfl 00 Chin. Phys. Soc. 1009-196/00/11(11)/118-07 Chinese Physics and IOP Publishing Ltd Analysis of the stability and density waves for trafc flow * Xue Yu( ) Shanghai Institute
Traffic flow theory involves the development of mathematical relationships among
 CHAPTER 6 Fundamental Principles of Traffic Flow Traffic flow theory involves the development of mathematical relationships among the primary elements of a traffic stream: flow, density, and speed. These
CHAPTER 6 Fundamental Principles of Traffic Flow Traffic flow theory involves the development of mathematical relationships among the primary elements of a traffic stream: flow, density, and speed. These
A Probability-Based Model of Traffic Flow
 A Probability-Based Model of Traffic Flow Richard Yi, Harker School Mentored by Gabriele La Nave, University of Illinois, Urbana-Champaign January 23, 2016 Abstract Describing the behavior of traffic via
A Probability-Based Model of Traffic Flow Richard Yi, Harker School Mentored by Gabriele La Nave, University of Illinois, Urbana-Champaign January 23, 2016 Abstract Describing the behavior of traffic via
Cumulative Count Curve and Queueing Analysis
 Introduction Traffic flow theory (TFT) Zhengbing He, Ph.D., http://zhengbing.weebly.com School of traffic and transportation, Beijing Jiaotong University September 27, 2015 Introduction Outline 1 Introduction
Introduction Traffic flow theory (TFT) Zhengbing He, Ph.D., http://zhengbing.weebly.com School of traffic and transportation, Beijing Jiaotong University September 27, 2015 Introduction Outline 1 Introduction
Solitons in a macroscopic traffic model
 Solitons in a macroscopic traffic model P. Saavedra R. M. Velasco Department of Mathematics, Universidad Autónoma Metropolitana, Iztapalapa, 093 México, (e-mail: psb@xanum.uam.mx). Department of Physics,
Solitons in a macroscopic traffic model P. Saavedra R. M. Velasco Department of Mathematics, Universidad Autónoma Metropolitana, Iztapalapa, 093 México, (e-mail: psb@xanum.uam.mx). Department of Physics,
Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision
 Commun. Theor. Phys. 56 (2011) 177 183 Vol. 56, No. 1, July 15, 2011 Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision PENG Yu ( Ý), 1 SHANG Hua-Yan (Ù), 2, and LU Hua-Pu
Commun. Theor. Phys. 56 (2011) 177 183 Vol. 56, No. 1, July 15, 2011 Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision PENG Yu ( Ý), 1 SHANG Hua-Yan (Ù), 2, and LU Hua-Pu
A family of multi-value cellular automaton model for traffic flow
 A family of multi-value cellular automaton model for traffic flow arxiv:nlin/0002007v1 [nlin.ao] 8 Feb 2000 Katsuhiro Nishinari a and Daisuke Takahashi b a Department of Applied Mathematics and Informatics,
A family of multi-value cellular automaton model for traffic flow arxiv:nlin/0002007v1 [nlin.ao] 8 Feb 2000 Katsuhiro Nishinari a and Daisuke Takahashi b a Department of Applied Mathematics and Informatics,
Encapsulating Urban Traffic Rhythms into Road Networks
 Encapsulating Urban Traffic Rhythms into Road Networks Junjie Wang +, Dong Wei +, Kun He, Hang Gong, Pu Wang * School of Traffic and Transportation Engineering, Central South University, Changsha, Hunan,
Encapsulating Urban Traffic Rhythms into Road Networks Junjie Wang +, Dong Wei +, Kun He, Hang Gong, Pu Wang * School of Traffic and Transportation Engineering, Central South University, Changsha, Hunan,
Phase transition on speed limit traffic with slope
 Vol 17 No 8, August 2008 c 2008 Chin. Phys. Soc. 1674-1056/2008/17(08)/3014-07 Chinese Physics B and IOP Publishing Ltd Phase transition on speed limit traffic with slope Li Xing-Li( ) a), Song Tao( )
Vol 17 No 8, August 2008 c 2008 Chin. Phys. Soc. 1674-1056/2008/17(08)/3014-07 Chinese Physics B and IOP Publishing Ltd Phase transition on speed limit traffic with slope Li Xing-Li( ) a), Song Tao( )
arxiv:cond-mat/ v2 [cond-mat.stat-mech] 22 Jan 1998
![arxiv:cond-mat/ v2 [cond-mat.stat-mech] 22 Jan 1998](/thumbs/80/81626805.jpg "arxiv:cond-mat/ v2 [cond-mat.stat-mech] 22 Jan 1998") 1 arxiv:cond-mat/9811v [cond-mat.stat-mech] Jan 1998 Investigation of the dynamical structure factor of the Nagel-Schreckenberg traffic flow model S. Lübeck, L. Roters, and K. D. Usadel Theoretische Physik,
1 arxiv:cond-mat/9811v [cond-mat.stat-mech] Jan 1998 Investigation of the dynamical structure factor of the Nagel-Schreckenberg traffic flow model S. Lübeck, L. Roters, and K. D. Usadel Theoretische Physik,
Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds.
 Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds. EVALUATING ADVANTAGE OF SHARING INFORMATION AMONG VEHICLES TOWARD
Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds. EVALUATING ADVANTAGE OF SHARING INFORMATION AMONG VEHICLES TOWARD
Traffic Flow Theory & Simulation
 Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
v n,t n
 THE DYNAMICAL STRUCTURE FACTOR AND CRITICAL BEHAVIOR OF A TRAFFIC FLOW MODEL 61 L. ROTERS, S. L UBECK, and K. D. USADEL Theoretische Physik, Gerhard-Mercator-Universitat, 4748 Duisburg, Deutschland, E-mail:
THE DYNAMICAL STRUCTURE FACTOR AND CRITICAL BEHAVIOR OF A TRAFFIC FLOW MODEL 61 L. ROTERS, S. L UBECK, and K. D. USADEL Theoretische Physik, Gerhard-Mercator-Universitat, 4748 Duisburg, Deutschland, E-mail:
Analytical Prediction of Self-organized Traffic Jams as a Function of Increasing ACC Penetration
 > REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 1 Analytical Prediction of Self-organized Traffic Jams as a Function of Increasing ACC Penetration Kshitij Jerath
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 1 Analytical Prediction of Self-organized Traffic Jams as a Function of Increasing ACC Penetration Kshitij Jerath
arxiv: v1 [physics.soc-ph] 18 Dec 2009
![arxiv: v1 [physics.soc-ph] 18 Dec 2009](/thumbs/76/74020169.jpg "arxiv: v1 [physics.soc-ph] 18 Dec 2009") arxiv:912.3613v1 [physics.soc-ph] 18 Dec 29 Enhanced Intelligent Driver Model to Access the Impact of Driving Strategies on Traffic Capacity By Arne Kesting 1, Martin Treiber 1 and Dirk Helbing 2 1 Institute
arxiv:912.3613v1 [physics.soc-ph] 18 Dec 29 Enhanced Intelligent Driver Model to Access the Impact of Driving Strategies on Traffic Capacity By Arne Kesting 1, Martin Treiber 1 and Dirk Helbing 2 1 Institute
Individual speed variance in traffic flow: analysis of Bay Area radar measurements
 Individual speed variance in traffic flow: analysis of Bay Area radar measurements Sebastien Blandin 1, Amir Salam, Alex Bayen Submitted For Publication 1 th Annual Meeting of the Transportation Research
Individual speed variance in traffic flow: analysis of Bay Area radar measurements Sebastien Blandin 1, Amir Salam, Alex Bayen Submitted For Publication 1 th Annual Meeting of the Transportation Research
A Stochastic Traffic Cellular Automata with Controlled Randomness
 A Stochastic Traffic Cellular Automata with Controlled Randomness Lorita Angeline 1, Mei Yeen Choong, Bih Lii Chua, Renee Ka Yin Chin, Kenneth Tze Kin Teo 2 Modelling, Simulation & Computing Laboratory
A Stochastic Traffic Cellular Automata with Controlled Randomness Lorita Angeline 1, Mei Yeen Choong, Bih Lii Chua, Renee Ka Yin Chin, Kenneth Tze Kin Teo 2 Modelling, Simulation & Computing Laboratory
Traffic experiment reveals the nature of car-following
 Traffic experiment reveals the nature of car-following Rui Jiang 1,2, *, Mao-Bin Hu 2, H.M.Zhang 3,4, Zi-You Gao 1, Bin-Jia 1, Qing-Song Wu 2, Bing Wang 5, Ming Yang 5 1 MOE Key Laboratory for Urban Transportation
Traffic experiment reveals the nature of car-following Rui Jiang 1,2, *, Mao-Bin Hu 2, H.M.Zhang 3,4, Zi-You Gao 1, Bin-Jia 1, Qing-Song Wu 2, Bing Wang 5, Ming Yang 5 1 MOE Key Laboratory for Urban Transportation
arxiv:cond-mat/ v1 [cond-mat.stat-mech] 14 Jun 1998
![arxiv:cond-mat/ v1 [cond-mat.stat-mech] 14 Jun 1998](/thumbs/83/87491077.jpg "arxiv:cond-mat/ v1 [cond-mat.stat-mech] 14 Jun 1998") arxiv:cond-mat/986171v1 [cond-mat.stat-mech] 14 Jun 1998 From Microscopic to Macroscopic Traffic Models Dirk Helbing 1, 1 II. Institute of Theoretical Physics, University of Stuttgart, Pfaffenwaldring
arxiv:cond-mat/986171v1 [cond-mat.stat-mech] 14 Jun 1998 From Microscopic to Macroscopic Traffic Models Dirk Helbing 1, 1 II. Institute of Theoretical Physics, University of Stuttgart, Pfaffenwaldring
Spontaneous-braking and lane-changing effect on traffic congestion using cellular automata model applied to the two-lane traffic
 Spontaneous-braking and lane-changing effect on traffic congestion using cellular automata model applied to the two-lane traffic Kohei Arai 1 Graduate School of Science and Engineering Saga University
Spontaneous-braking and lane-changing effect on traffic congestion using cellular automata model applied to the two-lane traffic Kohei Arai 1 Graduate School of Science and Engineering Saga University
Dynamics of Motorized Vehicle Flow under Mixed Traffic Circumstance
 Commun. Theor. Phys. 55 (2011) 719 724 Vol. 55, No. 4, April 15, 2011 Dynamics of Motorized Vehicle Flow under Mixed Traffic Circumstance GUO Hong-Wei (À å), GAO Zi-You (Ô Ð), ZHAO Xiao-Mei ( Ö), and XIE
Commun. Theor. Phys. 55 (2011) 719 724 Vol. 55, No. 4, April 15, 2011 Dynamics of Motorized Vehicle Flow under Mixed Traffic Circumstance GUO Hong-Wei (À å), GAO Zi-You (Ô Ð), ZHAO Xiao-Mei ( Ö), and XIE
The traffic statics problem in a road network
 The traffic statics problem in a road network Wen-Long Jin June 11, 2012 Abstract In this study we define and solve the traffic statics problem in an open diverge-merge network based on a multi-commodity
The traffic statics problem in a road network Wen-Long Jin June 11, 2012 Abstract In this study we define and solve the traffic statics problem in an open diverge-merge network based on a multi-commodity
An Analytical Model for Traffic Delays and the Dynamic User Equilibrium Problem
 OPERATIONS RESEARCH Vol. 54, No. 6, November December 26, pp. 1151 1171 issn 3-364X eissn 1526-5463 6 546 1151 informs doi 1.1287/opre.16.37 26 INFORMS An Analytical Model for Traffic Delays and the Dynamic
OPERATIONS RESEARCH Vol. 54, No. 6, November December 26, pp. 1151 1171 issn 3-364X eissn 1526-5463 6 546 1151 informs doi 1.1287/opre.16.37 26 INFORMS An Analytical Model for Traffic Delays and the Dynamic
Interacting Vehicles: Rules of the Game
 Chapter 7 Interacting Vehicles: Rules of the Game In previous chapters, we introduced an intelligent control method for autonomous navigation and path planning. The decision system mainly uses local information,
Chapter 7 Interacting Vehicles: Rules of the Game In previous chapters, we introduced an intelligent control method for autonomous navigation and path planning. The decision system mainly uses local information,
Angewandte Mathematik und Informatik. Universitat zu Koln, Metastable States in a Microscopic Model of Trac Flow. S. Krau, P. Wagner, C.
 Angewandte Mathematik und Informatik Universitat zu Koln Report No. 304 Metastable States in a Microscopic Model of Trac Flow by S. Krau, P. Wagner, C. Gawron 1997 Pysical Review E 55, 5597 S. Krau, P.
Angewandte Mathematik und Informatik Universitat zu Koln Report No. 304 Metastable States in a Microscopic Model of Trac Flow by S. Krau, P. Wagner, C. Gawron 1997 Pysical Review E 55, 5597 S. Krau, P.
Non-equilibrium statistical mechanics and applications to transport modelling. Rosemary Harris
 Non-equilibrium statistical mechanics and applications to transport modelling Rosemary Harris Goldsmiths Company Maths Course, July 24th 2008 Transport processes Outline Framework Stochastic Markovian
Non-equilibrium statistical mechanics and applications to transport modelling Rosemary Harris Goldsmiths Company Maths Course, July 24th 2008 Transport processes Outline Framework Stochastic Markovian
Transportation Research Part B
 Transportation Research Part B 44 (21) 93 1 Contents lists available at ScienceDirect Transportation Research Part B journal homepage: www.elsevier.com/locate/trb Three-phase traffic theory and two-phase
Transportation Research Part B 44 (21) 93 1 Contents lists available at ScienceDirect Transportation Research Part B journal homepage: www.elsevier.com/locate/trb Three-phase traffic theory and two-phase
arxiv: v2 [physics.soc-ph] 29 Sep 2014
![arxiv: v2 [physics.soc-ph] 29 Sep 2014](/thumbs/87/97179887.jpg "arxiv: v2 [physics.soc-ph] 29 Sep 2014") Universal flow-density relation of single-file bicycle, pedestrian and car motion J. Zhang, W. Mehner, S. Holl, and M. Boltes Jülich Supercomputing Centre, Forschungszentrum Jülich GmbH, 52425 Jülich,
Universal flow-density relation of single-file bicycle, pedestrian and car motion J. Zhang, W. Mehner, S. Holl, and M. Boltes Jülich Supercomputing Centre, Forschungszentrum Jülich GmbH, 52425 Jülich,
Capacity Drop. Relationship Between Speed in Congestion and the Queue Discharge Rate. Kai Yuan, Victor L. Knoop, and Serge P.
 Capacity Drop Relationship Between in Congestion and the Queue Discharge Rate Kai Yuan, Victor L. Knoop, and Serge P. Hoogendoorn It has been empirically observed for years that the queue discharge rate
Capacity Drop Relationship Between in Congestion and the Queue Discharge Rate Kai Yuan, Victor L. Knoop, and Serge P. Hoogendoorn It has been empirically observed for years that the queue discharge rate
CAPACITY DROP: A RELATION BETWEEN THE SPEED IN CONGESTION AND THE QUEUE DISCHARGE RATE
 CAPACITY DROP: A RELATION BETWEEN THE SPEED IN CONGESTION AND THE QUEUE DISCHARGE RATE Kai Yuan, PhD candidate TRAIL research school Department of Transport and Planning Faculty of Civil Engineering and
CAPACITY DROP: A RELATION BETWEEN THE SPEED IN CONGESTION AND THE QUEUE DISCHARGE RATE Kai Yuan, PhD candidate TRAIL research school Department of Transport and Planning Faculty of Civil Engineering and
Cell Transmission Models
 Cell Transmission Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Single source and sink CTM model 2 2.1 Basic Premise...................................
Cell Transmission Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Single source and sink CTM model 2 2.1 Basic Premise...................................
Fundamental Diagram Calibration: A Stochastic Approach to Linear Fitting
 Fundamental Diagram Calibration: A Stochastic Approach to Linear Fitting Brian Phegley Department of Mechanical Engineering University of California, Berkeley Berkeley, CA 947 phone: () 72-11 brianph@berkeley.edu
Fundamental Diagram Calibration: A Stochastic Approach to Linear Fitting Brian Phegley Department of Mechanical Engineering University of California, Berkeley Berkeley, CA 947 phone: () 72-11 brianph@berkeley.edu
Continuum Modelling of Traffic Flow
 Continuum Modelling of Traffic Flow Christopher Lustri June 16, 2010 1 Introduction We wish to consider the problem of modelling flow of vehicles within a traffic network. In the past, stochastic traffic
Continuum Modelling of Traffic Flow Christopher Lustri June 16, 2010 1 Introduction We wish to consider the problem of modelling flow of vehicles within a traffic network. In the past, stochastic traffic
Resonance, criticality, and emergence in city traffic investigated in cellular automaton models
 Resonance, criticality, and emergence in city traffic investigated in cellular automaton models A. Varas, 1 M. D. Cornejo, 1 B. A. Toledo, 1, * V. Muñoz, 1 J. Rogan, 1 R. Zarama, 2 and J. A. Valdivia 1
Resonance, criticality, and emergence in city traffic investigated in cellular automaton models A. Varas, 1 M. D. Cornejo, 1 B. A. Toledo, 1, * V. Muñoz, 1 J. Rogan, 1 R. Zarama, 2 and J. A. Valdivia 1
A Continuous Model for Two-Lane Traffic Flow
 A Continuous Model for Two-Lane Traffic Flow Richard Yi, Harker School Prof. Gabriele La Nave, University of Illinois, Urbana-Champaign PRIMES Conference May 16, 2015 Two Ways of Approaching Traffic Flow
A Continuous Model for Two-Lane Traffic Flow Richard Yi, Harker School Prof. Gabriele La Nave, University of Illinois, Urbana-Champaign PRIMES Conference May 16, 2015 Two Ways of Approaching Traffic Flow
A force model for single-line traffic. Abstract
 A force model for single-line traffic Li Ge 1, Qixi Mi 1, Rui Li 1, and J.W. Zhang 1,2 1 School of Physics, Peking University, Beijing 1871, P.R. China 2 Key Laboratory of Quantum Information and Quantum
A force model for single-line traffic Li Ge 1, Qixi Mi 1, Rui Li 1, and J.W. Zhang 1,2 1 School of Physics, Peking University, Beijing 1871, P.R. China 2 Key Laboratory of Quantum Information and Quantum
From experimemts to Modeling
 Traffic Flow: From experimemts to Modeling TU Dresden 1 1 Overview Empirics: Stylized facts Microscopic and macroscopic models: typical examples: Linear stability: Which concepts are relevant for describing
Traffic Flow: From experimemts to Modeling TU Dresden 1 1 Overview Empirics: Stylized facts Microscopic and macroscopic models: typical examples: Linear stability: Which concepts are relevant for describing
Improving the travel time prediction by using the real-time floating car data
 Improving the travel time prediction by using the real-time floating car data Krzysztof Dembczyński Przemys law Gawe l Andrzej Jaszkiewicz Wojciech Kot lowski Adam Szarecki Institute of Computing Science,
Improving the travel time prediction by using the real-time floating car data Krzysztof Dembczyński Przemys law Gawe l Andrzej Jaszkiewicz Wojciech Kot lowski Adam Szarecki Institute of Computing Science,
Common feature of concave growth pattern of oscillations in. terms of speed, acceleration, fuel consumption and emission in car
 Common feature of concave growth pattern of oscillations in terms of speed, acceleration, fuel consumption and emission in car following: experiment and modeling Junfang Tian Institute of Systems Engineering,
Common feature of concave growth pattern of oscillations in terms of speed, acceleration, fuel consumption and emission in car following: experiment and modeling Junfang Tian Institute of Systems Engineering,