Super-Resolution. Shai Avidan Tel-Aviv University
|
|
|
- Brandon Welch
- 5 years ago
- Views:
Transcription
1 Super-Resolution Shai Avidan Tel-Aviv University
2 Slide Credits (partial list) Ric Szelisi Steve Seitz Alyosha Efros Yacov Hel-Or Yossi Rubner Mii Elad Marc Levoy Bill Freeman Fredo Durand Sylvain Paris


3 Basic Super-Resolution Idea Given: A set of low-quality images: Required: Fusion of these images into a higher resolution image How? Comment: This is an actual superresolution reconstruction result

4 Example Surveillance 40 images ratio :4 4
5 Example Enhance Mosaics 5

6 6
7 Super-Resolution - Agenda The basic idea Image formation process Formulation and solution Special cases and related problems Limitations of Super-Resolution SR in time 7
8 Intuition For a given band-limited image, the yquist sampling theorem states that if a uniform sampling is fine enough ( D), perfect reconstruction is possible. D D 8
9 Intuition Due to our limited camera resolution, we sample using an insufficient D grid D D 9
10 Intuition However, if we tae a second picture, shifting the camera slightly to the right we obtain: D D 0
11 Intuition Similarly, by shifting down we get a third image: D D
12 Intuition And finally, by shifting down and to the right we get the fourth image: D D
13 Intuition It is trivial to see that interlacing the four images, we get that the desired resolution is obtained, and thus perfect reconstruction is guaranteed. 3
14 Rotation/Scale/Disp. What if the camera displacement is Arbitrary? What if the camera rotates? Gets closer to the object (zoom)? 4

15 Rotation/Scale/Disp. There is no sampling theorem covering this case 5
16 Agenda Modeling the Super-Resolution Problem Defining the relation between the given and the desired images The Maximum-Lielihood Solution A simple solution based on the measurements Bayesian Super-Resolution Reconstruction Taing into account behavior of images Some Results and Variations Examples, Robustifying, Handling color Super-Resolution: A Summary The bottom line
17 Chapter : Modeling the Super-Resolution Problem




18 The Model High- Resolution Image Geometric Warp F =I Blur H Decimation D V Y Low- Resolution Images Additive oise F H D Y V { } = DH F + V Y = Assumed nown
19 { } V Y = + = F H D The Model as One Equation V V V V Y Y Y Y + = + = = H F H D D H F D H F M M M
20 A Rule of Thumb Y Y Y Y H F H D D H F D H F = = = M M In the noiseless case we have Clearly, this linear system of equations should have more equations than unnowns in order to mae it possible to have a unique Least-Squares solution. Example: Assume that we have images of 00-by-00 pixels, and we would lie to produce an image of size 300- by-300. Then, we should require 9.
21 Chapter : The Maximum-Lielihood Solution
22 Super-Resolution - Model Geometric warp Blur Decimation High- Resolution Image F =I H D V Y Low- Resolution Exposures Additive oise F H D Y Y V { 0, } = D H F + V, V ~ σ n =
23 Simplified Model Geometric warp Blur Decimation High- Resolution Image F =I H D V Y Low- Resolution Exposures Additive oise F H D Y Y V { 0, } = DHF + V, V ~ σ n = 3
24 The Super-Resolution Problem Y = DHF + V { 0, } σ, V ~ n Given Y The measured images (noisy, blurry, down-sampled..) H The blur can be extracted from the camera characteristics D The decimation is dictated by the required resolution ratio F The warp can be estimated using motion estimation σ n The noise can be extracted from the camera / image Recover HR image 4
25 The Model as One Equation Y Y DH F V Y V DHF + = = = G M M M Y DHF V + V Y G r = resolution factor = 4 MM = size of the frames = = number of frames = 0 of of, V size size of [ M ] [ M r M ] [ r M ] size =[0M ] =[0M 6M] =[6M ] Linear algebra notation is intended only to develop algorithm 5
26 SR - Solutions Maximum Lielihood (ML): = argmin = = DHF Y Often ill posed problem! Maximum Aposteriori Probability (MAP) = argmin DHF Y { } +λa Smoothness constraint regularization6
27 ML Reconstruction (LS) ( ) = = ML Y DHF ε Minimize: ( ) ( ) 0 ˆ = = = T T T ML Y DHF H D F ε Thus, require: T T T T T T Y = = = ˆ D H F DHF D H F A B B A = ˆ 7
28 LS - Iterative Solution Steepest descent ˆ T T T n+ = ˆ β n F H D n = ( DHF ˆ Y ) Bac projection Simulated error All the above operations can be interpreted as operations performed on images. There is no actual need to use the Matrix-Vector notations as shown here. 8
29 LS - Iterative Solution Steepest descent ( ) T T T ˆ n+ = ˆ n β F H D DHF ˆ n Y = For =.. ˆ n Y geometry wrap convolve with H down sample - up sample convolve with H T inverse geometry wrap F H D T D T H T F -β ˆ n+ 9
30 Chapter 3: Bayesian Super-Resolution Reconstruction
31 The Model A Statistical View V V V V Y Y Y Y + = + = = H F H D D H F D H F M M M We assume that the noise vector, V, is Gaussian and white. { } { } exp Pr v V T V Const obv σ = For a nown, Y is also Gaussian with a shifted mean { } ( ) ( ) { } exp Pr v T Y Y Const Y σ H H =
32 Maximum-Lielihood Again The ML estimator is given by ˆ ML = ArgMaxProb Y { } which means: Find the image such that the measurements are the most liely to have happened. In our case this leads to what we have seen before ˆ ML { } = ArgMaxProb Y = ArgMin H Y
33 ML Often Sucs!!! For Example ˆ For the image denoising problem we get ML = ArgMin We got that the best ML estimate for a noisy image is the noisy image itself. Y ˆ=Y The ML estimator is quite useless, when we have insufficient information. A better approach is needed. The solution is the Bayesian approach.
34 Using The Posterior Instead of maximizing the Lielihood function Pr { Y } maximize the Posterior probability function Pr{ Y} This is the Maximum-Aposteriori Probability (MAP) estimator: Find the most probable, given the measurements A major conceptual change is assumed to be random
35 Why Called Bayesian? Bayes formula states that { Y} Pr = Pr { Y } Pr{ } Pr { Y} and thus MAP estimate leads to ˆ = ArgMaxPr = MAP { Y} ArgMax Pr{ Y } Pr{ } This part is already nown What shall it be?
36 Image Priors? { }? Pr = This is the probability law of images. How can we describe it in a relatively simple expression? Much of the progress made in image processing in the past 0 years (PDE s in image processing, wavelets, MRF, advanced transforms, and more) can be attributed to the answers given to this question.
37 MAP Reconstruction If we assume the Gibbs distribution with some energy function A() for the prior, we have Pr { } = Const exp{ A{ } ˆ MAP = = ArgMax Pr ArgMin { Y } Pr{ } HY { } +λa This additional term is also nown as regularization
38 MAP Choice of Regularization = ( ) Y D H F λa{ } ε + = Possible Prior functions - Examples:. A = S - simple smoothness (Wiener filtering), T T. A{ } = S W( 0) S- spatially adaptive smoothing, A { } { } = ρ{ S} 3. - M-estimator (robust functions), 4. The bilateral prior the one used in our recent wor: A P P { } ( n m = a ρ S S ) n= P m= P mn 4. Other options: Total Variation, Beltrami flow, example-based, sparse representations, h v
39 MAP Reconstruction MAP Regularization term: = ( ) DHF Y λa{ } ε + = Tihonov cost function A T { } = Γ Total variation A TV { } = Bilateral filter A B P P l+ m l m α SxS y 39 l= P m= P { } =
40 Robust Estimation + Regularization ( ) = = + = + = P P l P P m m y l x m l S S Y α λ ε DHF Minimize: ( ) [ ] ( ) + = = = + = + P P l P P m n m y l x n m y l x m l n T T T n n S S S S I Y ˆ ˆ sign ˆ sign ˆ ˆ α λ β DHF H D F 40
41 Robust Estimation + Regularization ˆ β P P l+ m ( ) + [ ] ( ) l m l m DHF ˆ Y λ I S S sign ˆ S S ˆ T T T = ˆ n F H D sign n n+ α = l= P m= P x y n x y n For =.. geometry wrap convolve with H down sample Y - sign up sample convolve with H T inverse geometry wrap ˆ n -β ˆ + n For l,m=-p..p horizontal shift l vertical shift m - sign horizontal shift -l vertical shift -m - m+ l λα From Farisu at al. IEEE trans. On Image Processing, 04 4
42 Chapter 4: Some Results and Variations


43 Example 0 Sanity Chec Synthetic case: 9 images, no blur, :3 ratio One of the lowresolution images The higher resolution original The reconstructed result



44 Example SR for Scanners 6 scanned images, ratio : Taen from one of the given images Taen from the reconstructed result

45 Example SR for IR Imaging 8 images*, ratio :4 * This data is courtesy of the US Air Force


46 40 images ratio :4 Example 3 Surveillance
47 MAP = Robust SR ( ) Y D H F λa{ } ε + = Cases of measurements outlier: Some of the images are irrelevant, Error in motion estimation, Error in the blur function, or General model mismatch. MAP = ( ) Y D H F λa{ } ε + =

48 Example 4 Robust SR 0 images, ratio :4 L norm based L norm based

49 Example 5 Robust SR 0 images, ratio :4 L norm based L norm based
50 MAP Handling Color in SR = ( ) Y D H F λa{ } ε + = Handling color: the classic approach is to convert the measurements to YCbCr, apply the SR on the Y and use trivial interpolation on the Cb and Cr. Better treatment can be obtained if the statistical dependencies between the color layers are taen into account (i.e. forming a prior for color images). In case of mosaiced measurements, demosaicing followed by SR is sub-optimal. An algorithm that directly fuse the mosaic information to the SR is better.

51 Example 6 SR for Full Color 0 images, ratio :4

52 Example 7 SR+Demoaicing 0 images, ratio :4 Mosaiced input Mosaicing and then SR Combined treatment
53 Chapter 5: Example based Super- Resolution

54 Example-based Super Resolution
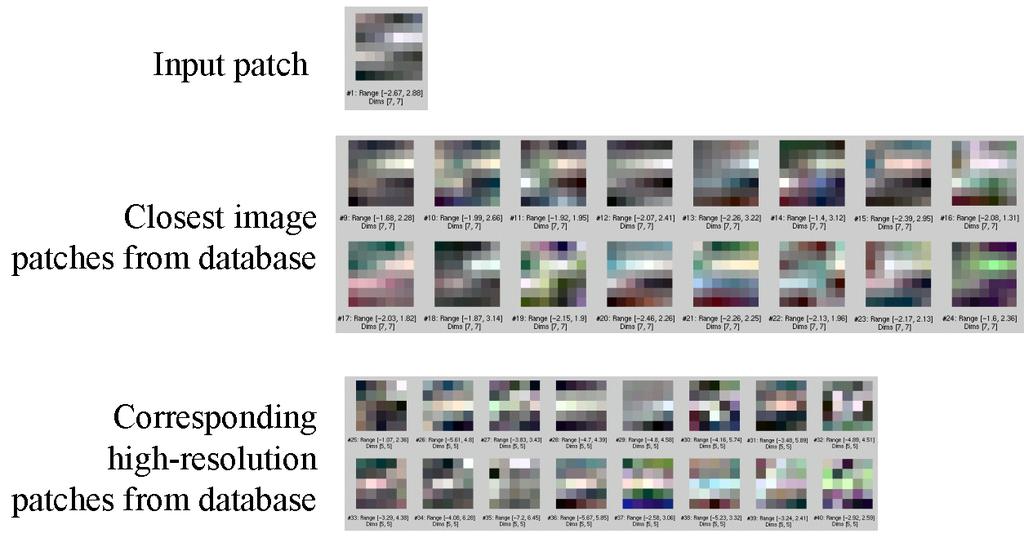
55 Failure

56 Marov etwor Model
57 Single Pass


58 Super Resolution Result Original 70x70 Cubic Spline Example based, training: generic True 80x80



59 Results MRF etwor One pass Original Cubic-spline One pass


60 Failure Original Cubic-spline One pass
61 Chapter 6: Combining example based and motion based SR


62 Idea Classical Multi-Image SR Single-Image Multi-Patch SR
63 Why should it wor? Image scales All image patches High variance patches only (top 5%)

64 Putting everything together

65 Results Input. Bicubic interpolation (3). Unified single-image SR (3). Ground truth image.
Super-Resolution. Dr. Yossi Rubner. Many slides from Miki Elad - Technion
 Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
ITERATED SRINKAGE ALGORITHM FOR BASIS PURSUIT MINIMIZATION
 ITERATED SRINKAGE ALGORITHM FOR BASIS PURSUIT MINIMIZATION Michael Elad The Computer Science Department The Technion Israel Institute o technology Haia 3000, Israel * SIAM Conerence on Imaging Science
ITERATED SRINKAGE ALGORITHM FOR BASIS PURSUIT MINIMIZATION Michael Elad The Computer Science Department The Technion Israel Institute o technology Haia 3000, Israel * SIAM Conerence on Imaging Science
Shai Avidan Tel Aviv University
 Image Editing in the Gradient Domain Shai Avidan Tel Aviv Universit Slide Credits (partial list) Rick Szeliski Steve Seitz Alosha Eros Yacov Hel-Or Marc Levo Bill Freeman Fredo Durand Slvain Paris Image
Image Editing in the Gradient Domain Shai Avidan Tel Aviv Universit Slide Credits (partial list) Rick Szeliski Steve Seitz Alosha Eros Yacov Hel-Or Marc Levo Bill Freeman Fredo Durand Slvain Paris Image
Single Exposure Enhancement and Reconstruction. Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman
 Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Bayesian Paradigm. Maximum A Posteriori Estimation
 Bayesian Paradigm Maximum A Posteriori Estimation Simple acquisition model noise + degradation Constraint minimization or Equivalent formulation Constraint minimization Lagrangian (unconstraint minimization)
Bayesian Paradigm Maximum A Posteriori Estimation Simple acquisition model noise + degradation Constraint minimization or Equivalent formulation Constraint minimization Lagrangian (unconstraint minimization)
Noise Removal? The Evolution Of Pr(x) Denoising By Energy Minimization. ( x) An Introduction to Sparse Representation and the K-SVD Algorithm
 Denoising By Energy Minimization. ( x) An Introduction to Sparse Representation and the K-SVD Algorithm") Sparse Representation and the K-SV Algorithm he CS epartment he echnion Israel Institute of technology Haifa 3, Israel University of Erlangen - Nürnberg April 8 Noise Removal? Our story begins with image
Sparse Representation and the K-SV Algorithm he CS epartment he echnion Israel Institute of technology Haifa 3, Israel University of Erlangen - Nürnberg April 8 Noise Removal? Our story begins with image
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
 Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
Inverse problem and optimization
 Inverse problem and optimization Laurent Condat, Nelly Pustelnik CNRS, Gipsa-lab CNRS, Laboratoire de Physique de l ENS de Lyon Decembre, 15th 2016 Inverse problem and optimization 2/36 Plan 1. Examples
Inverse problem and optimization Laurent Condat, Nelly Pustelnik CNRS, Gipsa-lab CNRS, Laboratoire de Physique de l ENS de Lyon Decembre, 15th 2016 Inverse problem and optimization 2/36 Plan 1. Examples
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors
 Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
Lecture 4: Probabilistic Learning. Estimation Theory. Classification with Probability Distributions
 DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
Wavelet-Based Nonparametric Modeling of Hierarchical Functions in Colon Carcinogenesis
 Wavelet-Based Nonparametric Modeling of Hierarchical Functions in Colon Carcinogenesis Jeffrey S. Morris University of Texas, MD Anderson Cancer Center Joint wor with Marina Vannucci, Philip J. Brown,
Wavelet-Based Nonparametric Modeling of Hierarchical Functions in Colon Carcinogenesis Jeffrey S. Morris University of Texas, MD Anderson Cancer Center Joint wor with Marina Vannucci, Philip J. Brown,
Expectation Maximization Mixture Models HMMs
 11-755 Machine Learning for Signal rocessing Expectation Maximization Mixture Models HMMs Class 9. 21 Sep 2010 1 Learning Distributions for Data roblem: Given a collection of examples from some data, estimate
11-755 Machine Learning for Signal rocessing Expectation Maximization Mixture Models HMMs Class 9. 21 Sep 2010 1 Learning Distributions for Data roblem: Given a collection of examples from some data, estimate
Regularization Theory
 Regularization Theory Solving the inverse problem of Super resolution with CNN Aditya Ganeshan Under the guidance of Dr. Ankik Kumar Giri December 13, 2016 Table of Content 1 Introduction Material coverage
Regularization Theory Solving the inverse problem of Super resolution with CNN Aditya Ganeshan Under the guidance of Dr. Ankik Kumar Giri December 13, 2016 Table of Content 1 Introduction Material coverage
Modeling Multiscale Differential Pixel Statistics
 Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Recent Advances in SPSA at the Extremes: Adaptive Methods for Smooth Problems and Discrete Methods for Non-Smooth Problems
 Recent Advances in SPSA at the Extremes: Adaptive Methods for Smooth Problems and Discrete Methods for Non-Smooth Problems SGM2014: Stochastic Gradient Methods IPAM, February 24 28, 2014 James C. Spall
Recent Advances in SPSA at the Extremes: Adaptive Methods for Smooth Problems and Discrete Methods for Non-Smooth Problems SGM2014: Stochastic Gradient Methods IPAM, February 24 28, 2014 James C. Spall
Introduction to Nonlinear Image Processing
 Introduction to Nonlinear Image Processing 1 IPAM Summer School on Computer Vision July 22, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Mean and median 2 Observations
Introduction to Nonlinear Image Processing 1 IPAM Summer School on Computer Vision July 22, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Mean and median 2 Observations
Sparse & Redundant Representations by Iterated-Shrinkage Algorithms
 Sparse & Redundant Representations by Michael Elad * The Computer Science Department The Technion Israel Institute of technology Haifa 3000, Israel 6-30 August 007 San Diego Convention Center San Diego,
Sparse & Redundant Representations by Michael Elad * The Computer Science Department The Technion Israel Institute of technology Haifa 3000, Israel 6-30 August 007 San Diego Convention Center San Diego,
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
What is Image Deblurring?
 What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
Estimating Gaussian Mixture Densities with EM A Tutorial
 Estimating Gaussian Mixture Densities with EM A Tutorial Carlo Tomasi Due University Expectation Maximization (EM) [4, 3, 6] is a numerical algorithm for the maximization of functions of several variables
Estimating Gaussian Mixture Densities with EM A Tutorial Carlo Tomasi Due University Expectation Maximization (EM) [4, 3, 6] is a numerical algorithm for the maximization of functions of several variables
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
Recent Advances in Bayesian Inference for Inverse Problems
 Recent Advances in Bayesian Inference for Inverse Problems Felix Lucka University College London, UK f.lucka@ucl.ac.uk Applied Inverse Problems Helsinki, May 25, 2015 Bayesian Inference for Inverse Problems
Recent Advances in Bayesian Inference for Inverse Problems Felix Lucka University College London, UK f.lucka@ucl.ac.uk Applied Inverse Problems Helsinki, May 25, 2015 Bayesian Inference for Inverse Problems
Supplementary Information for cryosparc: Algorithms for rapid unsupervised cryo-em structure determination
 Supplementary Information for cryosparc: Algorithms for rapid unsupervised cryo-em structure determination Supplementary Note : Stochastic Gradient Descent (SGD) SGD iteratively optimizes an objective
Supplementary Information for cryosparc: Algorithms for rapid unsupervised cryo-em structure determination Supplementary Note : Stochastic Gradient Descent (SGD) SGD iteratively optimizes an objective
Notes on Regularization and Robust Estimation Psych 267/CS 348D/EE 365 Prof. David J. Heeger September 15, 1998
 Notes on Regularization and Robust Estimation Psych 67/CS 348D/EE 365 Prof. David J. Heeger September 5, 998 Regularization. Regularization is a class of techniques that have been widely used to solve
Notes on Regularization and Robust Estimation Psych 67/CS 348D/EE 365 Prof. David J. Heeger September 5, 998 Regularization. Regularization is a class of techniques that have been widely used to solve
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Lecture 14 October 22
 EE 2: Coding for Digital Communication & Beyond Fall 203 Lecture 4 October 22 Lecturer: Prof. Anant Sahai Scribe: Jingyan Wang This lecture covers: LT Code Ideal Soliton Distribution 4. Introduction So
EE 2: Coding for Digital Communication & Beyond Fall 203 Lecture 4 October 22 Lecturer: Prof. Anant Sahai Scribe: Jingyan Wang This lecture covers: LT Code Ideal Soliton Distribution 4. Introduction So
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Sparse Recovery Beyond Compressed Sensing
 Sparse Recovery Beyond Compressed Sensing Carlos Fernandez-Granda www.cims.nyu.edu/~cfgranda Applied Math Colloquium, MIT 4/30/2018 Acknowledgements Project funded by NSF award DMS-1616340 Separable Nonlinear
Sparse Recovery Beyond Compressed Sensing Carlos Fernandez-Granda www.cims.nyu.edu/~cfgranda Applied Math Colloquium, MIT 4/30/2018 Acknowledgements Project funded by NSF award DMS-1616340 Separable Nonlinear
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
F denotes cumulative density. denotes probability density function; (.)
") BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
LPA-ICI Applications in Image Processing
 LPA-ICI Applications in Image Processing Denoising Deblurring Derivative estimation Edge detection Inverse halftoning Denoising Consider z (x) =y (x)+η (x), wherey is noise-free image and η is noise. assume
LPA-ICI Applications in Image Processing Denoising Deblurring Derivative estimation Edge detection Inverse halftoning Denoising Consider z (x) =y (x)+η (x), wherey is noise-free image and η is noise. assume
Part III Super-Resolution with Sparsity
 Aisenstadt Chair Course CRM September 2009 Part III Super-Resolution with Sparsity Stéphane Mallat Centre de Mathématiques Appliquées Ecole Polytechnique Super-Resolution with Sparsity Dream: recover high-resolution
Aisenstadt Chair Course CRM September 2009 Part III Super-Resolution with Sparsity Stéphane Mallat Centre de Mathématiques Appliquées Ecole Polytechnique Super-Resolution with Sparsity Dream: recover high-resolution
Lecture 8: Bayesian Estimation of Parameters in State Space Models
 in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning
 Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Resolving the White Noise Paradox in the Regularisation of Inverse Problems
 1 / 32 Resolving the White Noise Paradox in the Regularisation of Inverse Problems Hanne Kekkonen joint work with Matti Lassas and Samuli Siltanen Department of Mathematics and Statistics University of
1 / 32 Resolving the White Noise Paradox in the Regularisation of Inverse Problems Hanne Kekkonen joint work with Matti Lassas and Samuli Siltanen Department of Mathematics and Statistics University of
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
10-701/15-781, Machine Learning: Homework 4
 10-701/15-781, Machine Learning: Homewor 4 Aarti Singh Carnegie Mellon University ˆ The assignment is due at 10:30 am beginning of class on Mon, Nov 15, 2010. ˆ Separate you answers into five parts, one
10-701/15-781, Machine Learning: Homewor 4 Aarti Singh Carnegie Mellon University ˆ The assignment is due at 10:30 am beginning of class on Mon, Nov 15, 2010. ˆ Separate you answers into five parts, one
Estimation Error Bounds for Frame Denoising
 Estimation Error Bounds for Frame Denoising Alyson K. Fletcher and Kannan Ramchandran {alyson,kannanr}@eecs.berkeley.edu Berkeley Audio-Visual Signal Processing and Communication Systems group Department
Estimation Error Bounds for Frame Denoising Alyson K. Fletcher and Kannan Ramchandran {alyson,kannanr}@eecs.berkeley.edu Berkeley Audio-Visual Signal Processing and Communication Systems group Department
Multiple-Model Adaptive Estimation for Star Identification with Two Stars
 Multiple-Model Adaptive Estimation for Star Identification with Two Stars Steven A. Szlany and John L. Crassidis University at Buffalo, State University of New Yor, Amherst, NY, 460-4400 In this paper
Multiple-Model Adaptive Estimation for Star Identification with Two Stars Steven A. Szlany and John L. Crassidis University at Buffalo, State University of New Yor, Amherst, NY, 460-4400 In this paper
LINEARIZED BREGMAN ITERATIONS FOR FRAME-BASED IMAGE DEBLURRING
 LINEARIZED BREGMAN ITERATIONS FOR FRAME-BASED IMAGE DEBLURRING JIAN-FENG CAI, STANLEY OSHER, AND ZUOWEI SHEN Abstract. Real images usually have sparse approximations under some tight frame systems derived
LINEARIZED BREGMAN ITERATIONS FOR FRAME-BASED IMAGE DEBLURRING JIAN-FENG CAI, STANLEY OSHER, AND ZUOWEI SHEN Abstract. Real images usually have sparse approximations under some tight frame systems derived
Clustering by Mixture Models. General background on clustering Example method: k-means Mixture model based clustering Model estimation
 Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Satellite image deconvolution using complex wavelet packets
 Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
There is a unique function s(x) that has the required properties. It turns out to also satisfy
 that has the required properties. It turns out to also satisfy") Numerical Analysis Grinshpan Natural Cubic Spline Let,, n be given nodes (strictly increasing) and let y,, y n be given values (arbitrary) Our goal is to produce a function s() with the following properties:
Numerical Analysis Grinshpan Natural Cubic Spline Let,, n be given nodes (strictly increasing) and let y,, y n be given values (arbitrary) Our goal is to produce a function s() with the following properties:
Sparse & Redundant Signal Representation, and its Role in Image Processing
 Sparse & Redundant Signal Representation, and its Role in Michael Elad The CS Department The Technion Israel Institute of technology Haifa 3000, Israel Wave 006 Wavelet and Applications Ecole Polytechnique
Sparse & Redundant Signal Representation, and its Role in Michael Elad The CS Department The Technion Israel Institute of technology Haifa 3000, Israel Wave 006 Wavelet and Applications Ecole Polytechnique
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Introduction to Compressed Sensing
 Introduction to Compressed Sensing Alejandro Parada, Gonzalo Arce University of Delaware August 25, 2016 Motivation: Classical Sampling 1 Motivation: Classical Sampling Issues Some applications Radar Spectral
Introduction to Compressed Sensing Alejandro Parada, Gonzalo Arce University of Delaware August 25, 2016 Motivation: Classical Sampling 1 Motivation: Classical Sampling Issues Some applications Radar Spectral
EE 381V: Large Scale Optimization Fall Lecture 24 April 11
 EE 381V: Large Scale Optimization Fall 2012 Lecture 24 April 11 Lecturer: Caramanis & Sanghavi Scribe: Tao Huang 24.1 Review In past classes, we studied the problem of sparsity. Sparsity problem is that
EE 381V: Large Scale Optimization Fall 2012 Lecture 24 April 11 Lecturer: Caramanis & Sanghavi Scribe: Tao Huang 24.1 Review In past classes, we studied the problem of sparsity. Sparsity problem is that
Fast Local Laplacian Filters: Theory and Applications
 Fast Local Laplacian Filters: Theory and Applications Mathieu Aubry (INRIA, ENPC), Sylvain Paris (Adobe), Sam Hasinoff (Google), Jan Kautz (UCL), and Frédo Durand (MIT) Input Unsharp Mask, not edge-aware
Fast Local Laplacian Filters: Theory and Applications Mathieu Aubry (INRIA, ENPC), Sylvain Paris (Adobe), Sam Hasinoff (Google), Jan Kautz (UCL), and Frédo Durand (MIT) Input Unsharp Mask, not edge-aware
Image Noise: Detection, Measurement and Removal Techniques. Zhifei Zhang
 Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6)
") EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
A New Look at First Order Methods Lifting the Lipschitz Gradient Continuity Restriction
 A New Look at First Order Methods Lifting the Lipschitz Gradient Continuity Restriction Marc Teboulle School of Mathematical Sciences Tel Aviv University Joint work with H. Bauschke and J. Bolte Optimization
A New Look at First Order Methods Lifting the Lipschitz Gradient Continuity Restriction Marc Teboulle School of Mathematical Sciences Tel Aviv University Joint work with H. Bauschke and J. Bolte Optimization
Graphical Models for Collaborative Filtering
 Graphical Models for Collaborative Filtering Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012 Sequence modeling HMM, Kalman Filter, etc.: Similarity: the same graphical model topology,
Graphical Models for Collaborative Filtering Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012 Sequence modeling HMM, Kalman Filter, etc.: Similarity: the same graphical model topology,
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing
 Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
Wavelet Footprints: Theory, Algorithms, and Applications
 1306 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 51, NO. 5, MAY 2003 Wavelet Footprints: Theory, Algorithms, and Applications Pier Luigi Dragotti, Member, IEEE, and Martin Vetterli, Fellow, IEEE Abstract
1306 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 51, NO. 5, MAY 2003 Wavelet Footprints: Theory, Algorithms, and Applications Pier Luigi Dragotti, Member, IEEE, and Martin Vetterli, Fellow, IEEE Abstract
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
An Introduction to Expectation-Maximization
 An Introduction to Expectation-Maximization Dahua Lin Abstract This notes reviews the basics about the Expectation-Maximization EM) algorithm, a popular approach to perform model estimation of the generative
An Introduction to Expectation-Maximization Dahua Lin Abstract This notes reviews the basics about the Expectation-Maximization EM) algorithm, a popular approach to perform model estimation of the generative
Abel Inversion using the Maximum Entropy Method
 Abel Inversion using the Maximum Entropy Method Danilo R. Neuber Wolfgang von der Linden 3rd October 2003 Inst. für Theoretische Physik, Tel.: +43/3 16/8 73-81 88; neuber@itp.tu-graz.ac.at Inst. für Theoretische
Abel Inversion using the Maximum Entropy Method Danilo R. Neuber Wolfgang von der Linden 3rd October 2003 Inst. für Theoretische Physik, Tel.: +43/3 16/8 73-81 88; neuber@itp.tu-graz.ac.at Inst. für Theoretische
The Expectation-Maximization Algorithm
 The Expectation-Maximization Algorithm Francisco S. Melo In these notes, we provide a brief overview of the formal aspects concerning -means, EM and their relation. We closely follow the presentation in
The Expectation-Maximization Algorithm Francisco S. Melo In these notes, we provide a brief overview of the formal aspects concerning -means, EM and their relation. We closely follow the presentation in
An example of Bayesian reasoning Consider the one-dimensional deconvolution problem with various degrees of prior information.
 An example of Bayesian reasoning Consider the one-dimensional deconvolution problem with various degrees of prior information. Model: where g(t) = a(t s)f(s)ds + e(t), a(t) t = (rapidly). The problem,
An example of Bayesian reasoning Consider the one-dimensional deconvolution problem with various degrees of prior information. Model: where g(t) = a(t s)f(s)ds + e(t), a(t) t = (rapidly). The problem,
Markov Random Fields
 Markov Random Fields Umamahesh Srinivas ipal Group Meeting February 25, 2011 Outline 1 Basic graph-theoretic concepts 2 Markov chain 3 Markov random field (MRF) 4 Gauss-Markov random field (GMRF), and
Markov Random Fields Umamahesh Srinivas ipal Group Meeting February 25, 2011 Outline 1 Basic graph-theoretic concepts 2 Markov chain 3 Markov random field (MRF) 4 Gauss-Markov random field (GMRF), and
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Bayesian Methods for Sparse Signal Recovery
 Bayesian Methods for Sparse Signal Recovery Bhaskar D Rao 1 University of California, San Diego 1 Thanks to David Wipf, Jason Palmer, Zhilin Zhang and Ritwik Giri Motivation Motivation Sparse Signal Recovery
Bayesian Methods for Sparse Signal Recovery Bhaskar D Rao 1 University of California, San Diego 1 Thanks to David Wipf, Jason Palmer, Zhilin Zhang and Ritwik Giri Motivation Motivation Sparse Signal Recovery
Covariance-Based PCA for Multi-Size Data
 Covariance-Based PCA for Multi-Size Data Menghua Zhai, Feiyu Shi, Drew Duncan, and Nathan Jacobs Department of Computer Science, University of Kentucky, USA {mzh234, fsh224, drew, jacobs}@cs.uky.edu Abstract
Covariance-Based PCA for Multi-Size Data Menghua Zhai, Feiyu Shi, Drew Duncan, and Nathan Jacobs Department of Computer Science, University of Kentucky, USA {mzh234, fsh224, drew, jacobs}@cs.uky.edu Abstract
Inverse Problems in Image Processing
 H D Inverse Problems in Image Processing Ramesh Neelamani (Neelsh) Committee: Profs. R. Baraniuk, R. Nowak, M. Orchard, S. Cox June 2003 Inverse Problems Data estimation from inadequate/noisy observations
H D Inverse Problems in Image Processing Ramesh Neelamani (Neelsh) Committee: Profs. R. Baraniuk, R. Nowak, M. Orchard, S. Cox June 2003 Inverse Problems Data estimation from inadequate/noisy observations
Gradient-domain image processing
 Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
CPSC 340: Machine Learning and Data Mining
 CPSC 340: Machine Learning and Data Mining MLE and MAP Original version of these slides by Mark Schmidt, with modifications by Mike Gelbart. 1 Admin Assignment 4: Due tonight. Assignment 5: Will be released
CPSC 340: Machine Learning and Data Mining MLE and MAP Original version of these slides by Mark Schmidt, with modifications by Mike Gelbart. 1 Admin Assignment 4: Due tonight. Assignment 5: Will be released
Basic concepts in estimation
 Basic concepts in estimation Random and nonrandom parameters Definitions of estimates ML Maimum Lielihood MAP Maimum A Posteriori LS Least Squares MMS Minimum Mean square rror Measures of quality of estimates
Basic concepts in estimation Random and nonrandom parameters Definitions of estimates ML Maimum Lielihood MAP Maimum A Posteriori LS Least Squares MMS Minimum Mean square rror Measures of quality of estimates
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Noise-Blind Image Deblurring Supplementary Material
 Noise-Blind Image Deblurring Supplementary Material Meiguang Jin University of Bern Switzerland Stefan Roth TU Darmstadt Germany Paolo Favaro University of Bern Switzerland A. Upper and Lower Bounds Our
Noise-Blind Image Deblurring Supplementary Material Meiguang Jin University of Bern Switzerland Stefan Roth TU Darmstadt Germany Paolo Favaro University of Bern Switzerland A. Upper and Lower Bounds Our
A Comparison of Multiple-Model Target Tracking Algorithms
 University of New Orleans ScholarWors@UNO University of New Orleans heses and Dissertations Dissertations and heses 1-17-4 A Comparison of Multiple-Model arget racing Algorithms Ryan Pitre University of
University of New Orleans ScholarWors@UNO University of New Orleans heses and Dissertations Dissertations and heses 1-17-4 A Comparison of Multiple-Model arget racing Algorithms Ryan Pitre University of
Least Squares. Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 175A Winter UCSD
 ECE 175A Winter UCSD") Least Squares Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 75A Winter 0 - UCSD (Unweighted) Least Squares Assume linearity in the unnown, deterministic model parameters Scalar, additive noise model: y f (
Least Squares Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 75A Winter 0 - UCSD (Unweighted) Least Squares Assume linearity in the unnown, deterministic model parameters Scalar, additive noise model: y f (
Learning-Based Image Super-Resolution
 Limits of Algorithms Learning-Based Image Super-Resolution zhoulin@microsoft.com Microsoft Research Asia Nov. 8, 2008 Limits of Algorithms Outline 1 What is Super-Resolution (SR)? 2 3 Limits of Algorithms
Limits of Algorithms Learning-Based Image Super-Resolution zhoulin@microsoft.com Microsoft Research Asia Nov. 8, 2008 Limits of Algorithms Outline 1 What is Super-Resolution (SR)? 2 3 Limits of Algorithms
Subsampling and image pyramids
 Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
PARAMETER ESTIMATION AND ORDER SELECTION FOR LINEAR REGRESSION PROBLEMS. Yngve Selén and Erik G. Larsson
 PARAMETER ESTIMATION AND ORDER SELECTION FOR LINEAR REGRESSION PROBLEMS Yngve Selén and Eri G Larsson Dept of Information Technology Uppsala University, PO Box 337 SE-71 Uppsala, Sweden email: yngveselen@ituuse
PARAMETER ESTIMATION AND ORDER SELECTION FOR LINEAR REGRESSION PROBLEMS Yngve Selén and Eri G Larsson Dept of Information Technology Uppsala University, PO Box 337 SE-71 Uppsala, Sweden email: yngveselen@ituuse
Face recognition Computer Vision Spring 2018, Lecture 21
 Face recognition http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 21 Course announcements Homework 6 has been posted and is due on April 27 th. - Any questions about the homework?
Face recognition http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 21 Course announcements Homework 6 has been posted and is due on April 27 th. - Any questions about the homework?
These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
 course textbook Pattern Recognition and Machine Learning by Christopher Bishop") Music and Machine Learning (IFT68 Winter 8) Prof. Douglas Eck, Université de Montréal These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
Music and Machine Learning (IFT68 Winter 8) Prof. Douglas Eck, Université de Montréal These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
Multichannel Deconvolution of Layered Media Using MCMC methods
 Multichannel Deconvolution of Layered Media Using MCMC methods Idan Ram Electrical Engineering Department Technion Israel Institute of Technology Supervisors: Prof. Israel Cohen and Prof. Shalom Raz OUTLINE.
Multichannel Deconvolution of Layered Media Using MCMC methods Idan Ram Electrical Engineering Department Technion Israel Institute of Technology Supervisors: Prof. Israel Cohen and Prof. Shalom Raz OUTLINE.
CPSC 340: Machine Learning and Data Mining. MLE and MAP Fall 2017
 CPSC 340: Machine Learning and Data Mining MLE and MAP Fall 2017 Assignment 3: Admin 1 late day to hand in tonight, 2 late days for Wednesday. Assignment 4: Due Friday of next week. Last Time: Multi-Class
CPSC 340: Machine Learning and Data Mining MLE and MAP Fall 2017 Assignment 3: Admin 1 late day to hand in tonight, 2 late days for Wednesday. Assignment 4: Due Friday of next week. Last Time: Multi-Class
A STATE-SPACE APPROACH FOR THE ANALYSIS OF WAVE AND DIFFUSION FIELDS
 ICASSP 2015 A STATE-SPACE APPROACH FOR THE ANALYSIS OF WAVE AND DIFFUSION FIELDS Stefano Maranò Donat Fäh Hans-Andrea Loeliger ETH Zurich, Swiss Seismological Service, 8092 Zürich ETH Zurich, Dept. Information
ICASSP 2015 A STATE-SPACE APPROACH FOR THE ANALYSIS OF WAVE AND DIFFUSION FIELDS Stefano Maranò Donat Fäh Hans-Andrea Loeliger ETH Zurich, Swiss Seismological Service, 8092 Zürich ETH Zurich, Dept. Information
Cramér-Rao Bounds for Estimation of Linear System Noise Covariances
 Journal of Mechanical Engineering and Automation (): 6- DOI: 593/jjmea Cramér-Rao Bounds for Estimation of Linear System oise Covariances Peter Matiso * Vladimír Havlena Czech echnical University in Prague
Journal of Mechanical Engineering and Automation (): 6- DOI: 593/jjmea Cramér-Rao Bounds for Estimation of Linear System oise Covariances Peter Matiso * Vladimír Havlena Czech echnical University in Prague
Robust Camera Location Estimation by Convex Programming
 Robust Camera Location Estimation by Convex Programming Onur Özyeşil and Amit Singer INTECH Investment Management LLC 1 PACM and Department of Mathematics, Princeton University SIAM IS 2016 05/24/2016,
Robust Camera Location Estimation by Convex Programming Onur Özyeşil and Amit Singer INTECH Investment Management LLC 1 PACM and Department of Mathematics, Princeton University SIAM IS 2016 05/24/2016,
Multiview Geometry and Bundle Adjustment. CSE P576 David M. Rosen
 Multiview Geometry and Bundle Adjustment CSE P576 David M. Rosen 1 Recap Previously: Image formation Feature extraction + matching Two-view (epipolar geometry) Today: Add some geometry, statistics, optimization
Multiview Geometry and Bundle Adjustment CSE P576 David M. Rosen 1 Recap Previously: Image formation Feature extraction + matching Two-view (epipolar geometry) Today: Add some geometry, statistics, optimization
PATTERN RECOGNITION AND MACHINE LEARNING
 PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material
 A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
Tracking of Extended Objects and Group Targets using Random Matrices A New Approach
 Tracing of Extended Objects and Group Targets using Random Matrices A New Approach Michael Feldmann FGAN Research Institute for Communication, Information Processing and Ergonomics FKIE D-53343 Wachtberg,
Tracing of Extended Objects and Group Targets using Random Matrices A New Approach Michael Feldmann FGAN Research Institute for Communication, Information Processing and Ergonomics FKIE D-53343 Wachtberg,
ACTIVE safety systems on vehicles are becoming more
 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 1 Bayesian Road Estimation Using Onboard Sensors Ángel F. García-Fernández, Lars Hammarstrand, Maryam Fatemi, and Lennart Svensson Abstract This
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 1 Bayesian Road Estimation Using Onboard Sensors Ángel F. García-Fernández, Lars Hammarstrand, Maryam Fatemi, and Lennart Svensson Abstract This
Matrix and Tensor Factorization from a Machine Learning Perspective
 Matrix and Tensor Factorization from a Machine Learning Perspective Christoph Freudenthaler Information Systems and Machine Learning Lab, University of Hildesheim Research Seminar, Vienna University of
Matrix and Tensor Factorization from a Machine Learning Perspective Christoph Freudenthaler Information Systems and Machine Learning Lab, University of Hildesheim Research Seminar, Vienna University of
sparse and low-rank tensor recovery Cubic-Sketching
 Sparse and Low-Ran Tensor Recovery via Cubic-Setching Guang Cheng Department of Statistics Purdue University www.science.purdue.edu/bigdata CCAM@Purdue Math Oct. 27, 2017 Joint wor with Botao Hao and Anru
Sparse and Low-Ran Tensor Recovery via Cubic-Setching Guang Cheng Department of Statistics Purdue University www.science.purdue.edu/bigdata CCAM@Purdue Math Oct. 27, 2017 Joint wor with Botao Hao and Anru
Rapid, Robust, and Reliable Blind Deconvolution via Nonconvex Optimization
 Rapid, Robust, and Reliable Blind Deconvolution via Nonconvex Optimization Shuyang Ling Department of Mathematics, UC Davis Oct.18th, 2016 Shuyang Ling (UC Davis) 16w5136, Oaxaca, Mexico Oct.18th, 2016
Rapid, Robust, and Reliable Blind Deconvolution via Nonconvex Optimization Shuyang Ling Department of Mathematics, UC Davis Oct.18th, 2016 Shuyang Ling (UC Davis) 16w5136, Oaxaca, Mexico Oct.18th, 2016
Covariance Matrix Simplification For Efficient Uncertainty Management
 PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
Deep convolutional framelets:
 Deep convolutional framelets: application to diffuse optical tomography : learning based approach for inverse scattering problems Jaejun Yoo NAVER Clova ML OUTLINE (bottom up!) I. INTRODUCTION II. EXPERIMENTS
Deep convolutional framelets: application to diffuse optical tomography : learning based approach for inverse scattering problems Jaejun Yoo NAVER Clova ML OUTLINE (bottom up!) I. INTRODUCTION II. EXPERIMENTS
Bayesian Learning (II)
") Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning (II) Niels Landwehr Overview Probabilities, expected values, variance Basic concepts of Bayesian learning MAP
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning (II) Niels Landwehr Overview Probabilities, expected values, variance Basic concepts of Bayesian learning MAP
arxiv: v1 [astro-ph.im] 16 Apr 2009
![arxiv: v1 [astro-ph.im] 16 Apr 2009](/thumbs/94/118304716.jpg "arxiv: v1 [astro-ph.im] 16 Apr 2009") Closed form solution of the maximum entropy equations with application to fast radio astronomical image formation arxiv:0904.2545v1 [astro-ph.im] 16 Apr 2009 Amir Leshem 1 School of Engineering, Bar-Ilan
Closed form solution of the maximum entropy equations with application to fast radio astronomical image formation arxiv:0904.2545v1 [astro-ph.im] 16 Apr 2009 Amir Leshem 1 School of Engineering, Bar-Ilan
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?