Research Article Chaotic Behavior of the Biharmonic Dynamics System
|
|
|
- Elizabeth Tyler
- 5 years ago
- Views:
Transcription
1 Hindawi Publishing Corporation International Journal of Mathematics and Mathematical Sciences Volume 9, Article ID 979, 8 pages doi:.55/9/979 Research Article Chaotic Behavior of the Biharmonic Dynamics System Vladimir S. Aslanov Theoretical Mechanics Department, Faculty of Aircraft Construction, Samara State Aerospace University (SSAU), 4 Moscovskoe shosse, 4486 Samara, Russia Correspondence should be addressed to Vladimir S. Aslanov, aslanov vs@mail.ru Received July 8; Accepted January 9 Recommended by Peter Basarab-Horwath Motion of a biharmonic system under action of small periodic force and small damped force is studied. The biharmonic oscillator is a physical system acting under a biharmonic force like a sin θ b sin θ. The article contains biharmonic oscillator analysis, phase space research, and analytic solutions for separatrixes. The biharmonic oscillator performs chaotic motion near separatrixes under small perturbations. Melnikov method gives analytical criterion for heteroclinic chaos in terms of system parameters. A transition from chaotic to regular motion of the biharmonic oscillator was found as the heteroclinic chaos can be removed by increasing the coefficient of a damping force. The analytical results obtained using Melnikov method have been confirmed by a good match with numeric research. Copyright q 9 Vladimir S. Aslanov. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.. Introduction.. Reduction of the Biharmonic Dynamics System to the Duffing Equation As is well known, nonlinear systems can perform a chaotic motion under the action of periodic forces 4. Frequently the Duffing equation is used to illustrate chaos 4, and the chaotic behavior of various forms of the Duffing equation 5, some of which exhibit twofrequency excitation 6 as well as the chaotic motion of Duffing system with bounded noise 7 have been investigated. However the Duffing equation in the expanded generalized form has many mechanical applications and it can be interesting to researchers. In this paper, we will study periodically driven biharmonic dynamic system with a damping force: θ a sin θ b sin θ ε ( a sin θ b sin θ c ) cos ωt δ θ,. where ε and δ are assumed to be small positive parameters; ω> is the frequency of the
2 International Journal of Mathematics and Mathematical Sciences external force; and a, a, b, b,andc are coefficients. The terms in ε and in δ in. can be considered as small perturbations. If ε andδ, then the periodic and the damping force are absent, and we have the conservative system describing the motion of the undisturbed biharmonic oscillator as θ a sin θ b sin θ.. We will show that. is equivalent to the Duffing equation for small values of θ. It is known that sin x x x! x θ, θ,. and. can be written as ) ] θ a (θ θ b [θ θ!! { ε a (θ θ! ) b [θ θ! ] } c cos ωt δ θ..4 If the variable θ is a small of order ε, then we have the Duffing equation θ λθ μθ ε c λθ cos ωt δ θ O ( ε 4),.5 where λ a b, μ a 8b /!... Mechanical Applications The disturbed system. has applications in space flight mechanics when studying a problem of a spacecraft motion about its center of mass in the atmosphere. Atmospheric reentry is a critical phase for space vehicles. Dynamic stability issues play a crucial role for the success of their mission. For effective breaking while descending in the rarefied atmosphere of Mars or Titan we can compensate blunt-shaped spacecrafts by a small increase in length 8. We will consider blunt-shaped spacecraft. An aerodynamic restoring moment strongly influences the motion of the spacecraft relative to the center of mass. The aerodynamic restoring moment coefficient for an axisymmetric rigid body can be written as, m θ θ m O θ c n θ x c,.6 where θ is the spatial angle of attack θ is defined as the angle between symmetry axis and the velocity of the spacecraft V, Figure, m O is the pitching moment coefficient concerning the leading edge body, c n is the normal force coefficient, x c x c /L is the nondimensional coordinate of the center of mass, and L is aerodynamic reference length shield diameter. Such spacecrafts can have three positions of equilibrium according to the angle of attack θ: stable position at the points θ andθ ; and unstable in the third intermediate

3 International Journal of Mathematics and Mathematical Sciences m θ x c V θ L θ θ Figure : A blunt-shaped spacecraft. point θ,,. The restoring moment can be approximated as the biharmonic dependence Figure m θ a sin θ b sin θ..7 The presence of the second harmonic in.7 causes the possibility of appearance of an additional equilibrium position saddle point on a phase portrait. For the considered spacecrafts position, θ is stable; therefore, a derivative of the function m θ θ with respect to the angle of attack θ at this point is negative: m θ θ a cos θ b cos θ θ <.8 or b < a,.9 and if there exists an intermediate position of equilibrium inside the interval of,, then m θ θ sin θ a b cos θ,. which holds true, if b > a.. It is obvious that.9 and. are valid simultaneously when b <. Note that the dependence of m θ θ given in Figure satisfies conditions.9 and.. The stable position occurs not only in the point of θ but also in the point of θ when.9 for the spacecraft is fulfilled. The motion of the spacecraft in a neighborhood of
4 4 International Journal of Mathematics and Mathematical Sciences θ cannot be allowed, because in this case the back part of the spacecraft will move toward to an approach flow. The aerodynamic restoring moment can be written by M θ m θ θ qsl,. where S is reference surface and q is the dynamic pressure. Disturbance will simulate periodic change of position of the center of mass x c x c ε cos ωt,. where x c is an initial position of the center of mass. Using expression.6, we represent the aerodynamic restoring moment as M θ A sin θ B sin θ ε A sin θ B sin θ cos ωt..4 Thus, the planar motion of the spacecraft about the center of mass can be described by I θ A sin θ B sin θ ε A sin θ B sin θ cos ωt M d,.5 where I is the transverse moment of inertia, M d δ θ is small damping moment. Obviously, the equation of spacecraft motion.5 corresponds to the biharmonic dynamics system. at c up to constants. Let us observe, that the undisturbed equation. describes the motion of a known mechanical system a heavy material point on a circle, rotating about a vertical axis 4 ( θ a sin θ b sin θ a g ) l,b Ω >,.6 where g is the gravitational acceleration, l is the radius of the circle and Ω is the angular velocity of the circle... Aim and Structure of the Article Let conditions.9 and. be satisfied, and let there be three positions of equilibrium. In this case, we find three regions in the phase portrait separated by separatrixes. Under the effect of disturbances the phase trajectory θ θ θ can repeatedly intersect the separatrixes, thus moving from one an area to another, is accompanied by a jump change of the variable θ. We can observe chaos. It is an accepted fact in the theory of nonlinear dynamic systems that knowledge of the stable and unstable manifolds of hyperbolic equilibrium or hyperbolic periodic orbits may play a crucial role in understanding many issues of dynamics,. For many dynamic systems, the only general way of studying such stable and unstable manifolds is computing them numerically. However, in some cases we can obtain analytic solutions. The aim of this paper is to analyze the motion of the disturbed system. near the undisturbed separatrixes and to define the boundaries of chaos. We will carry out
5 International Journal of Mathematics and Mathematical Sciences 5 the theoretical studies by means of the Melnikov method 5. The Melnikov method is an analytical tool used to determine to first order, the existence of homo/heteroclinic intersections and so chaotic behavior. The Melnikov method allows us to obtain a necessary condition for the existence of chaos, therefore, numerical simulation is needed to confirm the predicted behavior and to give a deeper understanding of the global dynamics of the system. We will show that our theoretical results are in good agreement with the results of numerical calculations. The present paper is structured in the following way. Section gives the analysis of the unperturbed motion of the biharmonic dynamics system. and the phase portrait. On the phase portrait characteristic regions of the possible motions are found and for these areas the analytical solutions of the equation of the unperturbed motion are obtained. The main features of the phase space of the unperturbed system are defined. In Section the Melnikov criterion for the perturbed system is analytically calculated for various areas of the phase portrait with help of the theory of residues. In Section 4 the Melnikov criterion is numerically calculated for various areas of a phase portrait for the case of disturbed motion of the spacecraft. By means of computer numerical simulations of the disturbed motion, we use several numerical techniques to check the validity of the analytical criterion for chaos obtained using Melnikov method.. The Unperturbed Solutions The ε and δ terms in. are considered as small perturbations. If ε andδ, then periodic and dissipation forces are absent, and we have the conservative system.. Itis obvious that if b ora replacement of variables ϕ θ we have the equation of a mathematical pendulum. However, if.9 and. are satisfied b <, then biharmonic dynamic system has a more complicated phase portrait in comparison with the mathematical pendulum or with the heavy material point on a circle.6. The equilibrium positions of the system. are defined from..if.9 and. are satisfied, then the undisturbed system. has four equilibrium positions at θ, : two stable center type θ,. and two unstable saddle type ( θ ± arccos a ),. b where b<. The center θ coincides with the center θ.atθ and at θ the speeds θ coincide, therefore we can say, that phase trajectories are closed on a cylindrical phase space. We will consider the evolution of the cylindrical space in the range θ,. We will separate two regions A and A, divided by the two saddles s and s Figure. It is necessary to note, that the region A of the development of the cylinder undergoes a break at θ,. From. it follows, that if the coefficient a is equal, the saddle s is in the position: θ /. At positive values of the coefficient a> the saddle s belongs to the interval: θ,/, and at negative values a< the saddle s belongs to the interval: θ /, Figure.
6 6 International Journal of Mathematics and Mathematical Sciences A A A W.5 W J W.5 c c c s s a b Figure : The potential energy W θ a cos θ b cos θ and the phase space for a, b. The following energy integral corresponds to. : θ a cos θ b cos θ E,. where E is total energy. The biharmonic oscillator as well as the mathematical pendulum can perform oscillations and rotation. The shape of the phase portrait depends on the potential energy: W θ a cos θ b cos θ..4 The centers. correspond to the minimum of the potential energy.4, and the saddles. to the maximum of the potential energy.4. IfE>W, where W W ( θ, then the motion is possible in the outer regions Figure. In the opposite case E <W the motion can occur in any of the inner regions, depending on initial conditions. The equality E W corresponds to the motion along separatrixes. In this case, the two saddles s and s are connected by four heteroclinic trajectories. First of all, we will consider the separatrixes, limiting the region A. Separating the variables in the energy integral., and taking into account. and.4, the equation of the motion on the separatrixes can be written as in the integrated form t t θ θ dθ [ W ( ) ],.5 θ a cos θ b cos θ where W ( θ ) a cos θ b cos θ a 4b..6
7 International Journal of Mathematics and Mathematical Sciences 7 Substituting the variables: x tan θ,.7 we can rewrite.5 as x t t x dx ψ x, ψ x Px 4 Cx A,.8 where P W θ a b, C 4 W θ b, A W θ a b. The integral.8 can be simplified 6 t t x dx P x x x ln x x P x x x x,.9 where x tan θ / and P W θ a b a b /b > and conditions.9 and. are satisfied. Finally, using the change of variables.7 and.9, the solution of. for the heteroclinic orbits, for the region A Figure, can be written as [ θ t arctan tan θ tanh ( )] λt, σ t θ [ θ t,σ t ] [ θ t, σ t ], λ sin θ cosh λt cos θ,. where λ tan θ a 4b P.. b Now we will consider the region A, including the center c. Let us make a substitution to the new variable β θ. in the equation of undisturbed motion. and obtain the following equation β a sin β b sin β.. Computing as in..9, we obtain the solution of this equation in the form { β arctan tan β tanh [ λ ( t t ) ]},.4
8 8 International Journal of Mathematics and Mathematical Sciences where β θ. Then, coming back to the variable θ with help of., we will receive the equation of the heteroclinic orbits, bounding the region A, including the center c Figure : [ θ t arctan cot θ tanh ( )] λt, σ t θ λ sin θ cosh λt cos θ,.5 [ θ t,σ t ] [ θ t, σ t ].. Chaotic Motion. The Melnikov Criterion.. General Positions Now we set the stage for our study of the disturbed system.. The stable and unstable manifolds do not necessarily coincide and it is possible that they can cross transversally leading to an infinite number of new heteroclinic points. Then, a heteroclinic tangle is generated. In this case, because of the perturbation, the motion of the system., near the unperturbed separatrices, becomes chaotic. Inside this chaotic layer small isolated regions of regular motion with periodic orbits can also appear. The existence of heteroclinic intersections may be proved by means of the Melnikov method 5. We present a more convenient form the for application of Melnikov method to the disturbed nonautonomous equation of the second order. as three differential autonomous equations of the first order : θ σ f g, σ a sin θ b sin θ ε ( a sin θ b sin θ c ) cos φ δσ f g,. φ ω, where f σ, g, f a sin θ b sin θ, g ε ( a sin θ b sin θ c ) cos φ δσ.. The Melnikov function for system. is given by M ±( t,φ ) { f [ q ± t ] g [ q ± t,ωt ωt φ ] f [ q ± t ] g [ q ± t,ωt ωt φ ]} dt { f [ q ± t ] g [ q ± t,ωt ωt φ ]} dt,. where q ± t θ ± t,σ ± t are the solutions of the undisturbed heteroclinic orbits. or.5 for the areas A or A.
9 International Journal of Mathematics and Mathematical Sciences 9.. Case a, b, c The disturbed system. in this case takes the form θ σ f g, σ a sin θ b sin θ ε cos φ δσ f g,.4 φ ω, where f σ, g, f a sin θ b sin θ, g ε cos φ δσ..5 Substituting.5 into. gives M ±( t,φ ) σ ± { ε cos ( ωt ωt φ ) δσ± } dt ε ± cos σ ( ) ( ) dt ωt ωt φ dt δ σ± Mε M δ,.6 where M ε and M δ are the functions corresponding to both perturbations: the external periodic force ε cos ωt and the damping force δ θ, respectively. The Melnikov function describes the splitting of the stable and unstable manifolds of the disturbed hyperbolic fixed points defined on the cross-section. Thus, there are transverse intersections between the stable and unstable trajectories, if M ± t. Firstly we consider the functions M and M δ ε for the area A, including the center c Figure. Substituting. into.6 gives M δ ( ) dt δ σ± δ sin θ S dt [ ], cosh λt cos θ M ( ) ε t,φ ε ± cos σ ( ) cos ( ) ωt ωt φ ωt ωt φ dt ελ sin θs dt. cosh λt cos θ.7 So using the tabulated integrals 6, 7, for the integrals.7 we obtain the following expressions M δ δλ ( θ cot θ ), M ( ) sinh ( θ ω/λ ) ε t,φ ε λ sin ( ) ( ) cos ( ) ωt φ M ε max cos ( ) ωt φ. θ sinh ω/λ.8
10 International Journal of Mathematics and Mathematical Sciences Similar expressions can be obtained for M δ c Figure, using the solutions.5 and M ε for the region A, including the center M δ ( ) δ σ± dt δ sin θ dt [ ], cosh λt cos θ M ( ) ε t,φ ε ± cos σ ( ) cos ( ) ωt ωt φ ωt ωt φ dt ελ sin θs dt, cosh λt cos θ.9 or M δ δλ [ ( θ ) cot θ ], M ( ) sinh [( ) ] θ ω/λ ε t,φ ε λ sin ( ) cos ( ) ωt φ M ε max cos ( ) ωt φ, θ sinh ω/λ. where M ε max and M ε max are measures of the maximum splitting of the stable and unstable manifolds, when the disturbed system.4 is only under the action of the one perturbation the external periodic force ε cos ωt for the regions A and A, respectively. Obviously, at a the undisturbed biharmonic oscillator. is transformed to the simpler system: θ sin θ. The regions A and A are equal. From.,., and.5, we obtain θ, λ b.. Following the expressions.8., the Melnikov function becomes identical for the regions A and A : M ±( ( ) ( ) t,φ Mδ M ε t,φ δλ ε λ sec h ) ω cos ( ) ωt φ. λ. From.8., it is easy to see that the conditions for the manifolds to intersect in terms of the parameters δ, ε is given by [ sinh ( θ ω/λ ) ] δ< λ ( ) ( ) ε θ S cot θ sin θ sinh ω/λ { sinh ( ) } θ ω/λ δ< λ [ ( ) ] ( ) ε θ cot θ sin θ sinh ω/λ ( for the area A ), ( for the area A ).. Let us define a new parameter of the damping force, divided into amplitude of external force: Δ δ ε,.4
11 International Journal of Mathematics and Mathematical Sciences 4 θ Δ Δ θ Δ Δ a Figure : The criteria Δ j and the variable θ of parameter a for b andω. Δ Δ Δ Δ ω c 4 5 Figure 4: The criteria Δ j as functions of the frequency ω. then conditions. are given by Δ < Δ < sinh ( θ ω/λ ) λ ( θ cot θ ) sin ( θ ) sinh ω/λ Δ ( for the area A ), sinh [( θ ) ω/λ ] λ [ ( θ ) cot θ ] sin ( θ ) sinh ω/λ Δ ( for the area A )..5 Let us note, that θ and λ, according to. and., depend on coefficients a and b, therefore criteria.5 are functions of the parameters a, b,andω Δ j Δ j a, b, ω, j,..6 The criteria.6 define chaotic behavior of the perturbed system.4 in the regions A and A.InFigure, we graph these criteria and the variable θ as functions of parameter a for the fixed parameter b andω. Figure 4 shows the criteria.6 as functions of the frequency ω.
12 International Journal of Mathematics and Mathematical Sciences.. Case a /, b /, c The disturbed system. in this case takes the form of θ σ f g, σ a sin θ b sin θ ε ( a sin θ b sin θ ) cos φ δσ f g,.7 φ ω, where f σ, g, f a sin θ b sin θ, g ε a sin θ b sin θ cos φ δσ, M ±( t,φ ) σ ± [ ε ( a sin θ ± b sin θ ± ) cos ( ωt ωt φ ) δσ± ] dt.8 or M ±( t,φ ) Mε M δ,.9 where ( ) ( ) M ε ε σ ± a sin θ ± b sin θ ± cos ωt ωt φ dt,. ( ) dt. M δ δ σ± For the two regions A and A the functions. can be represented as M k ε M k δ εi k ± sin ( ωt φ ), δj k ±, k,,. where I k ± σ k ± ( a sin θ k ± b sin θ k ) ± sin ωt dt,. J k ( k ) ± σ ± dt.. It is obvious that using.8 integrals. can be rewritten as J ± λ ( θ cot θ ), J ± λ [ ( θ ) cot θ ],.4
13 International Journal of Mathematics and Mathematical Sciences The improper integral. in view of. and.5 is calculated numerically. For parameter.4 the conditions for the manifolds to intersect are given by Δ < I ± Δ ( ) for the area A, J ±.5 Δ < I ± ( ) Δ J for the area A. ± Criteria.5 define behavior of the perturbed system.7 in a vicinity of separatrixes. 4. Numerical Analysis We have analyzed the evolution of the dynamical behavior of the disturbed system. as the parameters vary, studying the time histories of the variable θ and its derivative θ. Numerical techniques are based on the numerical integration of the equation of the disturbed motion. implementing a fixed-step fourth-order Runge-Kutta algorithm. For all numerical calculations the following biharmonic force parameters were used: a, b and the frequency of the perturbed force was ω. For the numerical analysis of the disturbed system. we use the P Poincaré cross-section method, examining manifolds with plane sections, perpendicular to the phase axis φ in the two-dimensional space θ, θ, divided with an interval of. It allows us to study the disturbed system. using a discrete phase instead of examining the continuous dynamics of the system. At ε, δ the regular structure of phase space is observed, trajectories have no intersections, and Poincarésections coincide with undisturbed phase portrait Figure 5. Disturbances ε / result in the complication of phase space and the occurrence of a chaotic layer near the undisturbed separatrixes Figures 6 9. Figures 6 and 7 contain Poincaré sections for the case considered in Section., and in Figures 8 and 9 in Section.. The growth of disturbances there leads to an increase in the width of the chaotic layer, and the new oscillatory modes determined by closed curves, uncharacteristic for the undisturbed case are observed. In the presence of damping phase trajectories eventually tended to reach steady positions of equilibrium of the undisturbed system Figures,. In order to check in a quantitative way the validity of the analytic criteria.5 we focus on the evolution of the stable and unstable manifolds associated to the saddle fixed points. Parameters a, b and the frequency ω in expressions.5 give a critical value for the regions A and A : Δ.95, Δ.45, 4. or critical values of the coefficients of a damping force for ε.: δ εδ.8, δ εδ



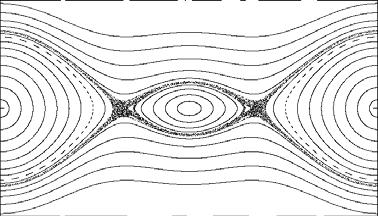
14 4 International Journal of Mathematics and Mathematical Sciences / / Figure 5: Poincaré sections for ε, δ. / / Figure 6: Poincaré sections in the case of a, b, c forε., δ. / / Figure 7: Poincaré sections in the case of a, b, c forε., δ. / / Figure 8: Poincaré sections in the case of a, b, c forε., δ.



15 International Journal of Mathematics and Mathematical Sciences 5 / / Figure 9: Poincaré sections in the case of a, b, c forε., δ. / / Figure : Poincaré sections in the case of a, b, c forε., δ.. / / Figure : Poincaré sections in the case of a, b, c forε., δ.. Figure shows numerical simulations of the phase space with initial conditions close to the undisturbed separatrix θ.57, θ., φ / for the region A. Now, we reset the value of δ from δ.8 to greater ones see Figure. It can be observed clearly that, for δ<δ δ.8, the stable and unstable manifolds transversally intersect each other Figure a. However, when δ>δ δ., the invariant manifolds do not intersect Figure b. Similar results for the region A are shown in Figure δ.96 for the following initial conditions: θ.947, θ., φ. Figure a δ<δ δ.9.
16 6 International Journal of Mathematics and Mathematical Sciences θ θ a θ θ b Figure : Evolution of stable and unstable manifolds as a function of the damping force coefficients δ for a, b, ε., ω and two different values of δ close to the critical value δ.8. a δ.8 b δ., with following initial conditions: θ.57, θ., φ / for the area A. Figure b δ>δ δ.. Thus the description, based on numerical simulations for some certain parameter values, makes a good match with the analytic criteria.5 provided by Melnikov method. 5. Conclusion This work attempts to describe the transient cases occurring during a spacecraft descent in a planet atmosphere using methods of chaotic mechanics, in particular, the Melnikov method. We have suggested to introduce the concept of a biharmonic system. which reflects the behavior of the spacecrafts, and also, probably, more general mechanical systems. We have established the existence of transient heteroclinic chaos by means of the Melnikov method. Moreover, this method has provided an analytic criterion for the existence of chaotic behavior in terms of the system parameters. We have found a transition from chaotic to regular regime in the motion of the biharmonic oscillator, as the heteroclinic chaos can be removed by increasing the coefficient of a damping force. The analytic results given by the Melnikov method have been confirmed by a good match with the numeric research.
17 International Journal of Mathematics and Mathematical Sciences 7 θ / / a θ / / b Figure : Evolution of stable and unstable manifolds as a function of the damping force coefficients δ for a, b, ε., ω and two different values of δ close to the critical value δ.96. a δ.9 b δ., with following initial conditions: θ.947, θ., φ for the area A. Acknowledgment The author would like to thank the Russian Foundation for Basic Research Project no a, which has supported this work. References J. Guckenheimer and P. Holmes, Nonlinear Oscillations, Dynamical and Bifurcations of Vector Fields, Springer, New York, NY, USA, 986. S. Wiggins, Introduction to Applied Nonlinear Dynamical Systems and Chaos, vol. of Texts in Applied Mathematics, Springer, New York, NY, USA, 99. F. C. Moon, Chaotic Vibrations: An Introduction for Applied Scientists and Engineers, A Wiley-Interscience Publication, John Wiley & Sons, New York, NY, USA, E. Simiu, Chaotic Transitions in Deterministic and Stochastic Dynamical Systems, Princeton Series in Applied Mathematics, Princeton University Press, Princeton, NJ, USA,. 5 Z.-G. Li, W. Xu, and X.-Y. Zhang, Analysis of chaotic behavior in the extended Duffing-Van der Pol system subject to additive non-symmetry biharmonical excitation, Applied Mathematics and Computation, vol. 8, no., pp , 6.
18 8 International Journal of Mathematics and Mathematical Sciences 6 I. I. Blekhman and P. S. Landa, Conjugate resonances and bifurcations in nonlinear systems under biharmonical excitation, International Journal of Non-Linear Mechanics, vol. 9, no., pp. 4 46, 4. 7 W. Y. Liu, W. Q. Zhu, and Z. L. Huang, Effect of bounded noise on chaotic motion of duffing oscillator under parametric excitation, Chaos, Solitons and Fractals, vol., no., pp ,. 8 A. Wilson and A. Chicarro, Mars Express: The Scientific Payload. Vol. SP-4, ESA, Noordwijk, The Netherlands, 4. 9 R. Gershman, M. Adams, R. Mattingly, et al., Planetary protection for Mars sample return, Advances in Space Research, vol. 4, no., pp. 8 7, 4. J. Collinet, P. Brenner, and S. Palerm, Dynamic stability of the HUYGENS probe at Mach.5, Aerospace Science and Technology, vol., no. -, pp., 7. G. Colombatti, A. Aboudan, F. Ferri, and F. Angrilli, Huygens probe entry dynamic model and accelerometer data analysis, Planetary and Space Science, vol. 56, no. 5, pp. 6 6, 8. V. S. Aslanov and A. S. Ledkov, Features of rotational motion of a spacecraft descending in the Martian atmosphere, Cosmic Research, vol. 45, no. 4, pp. 8, 7. V. S. Aslanov, Resonance at motion of a body in the Mars s atmosphere under biharmonical moment, WSEAS Transactions on Systems and Control, vol., no., pp. 9, 8. 4 A. A. Andronov, A. A. Vitt, and S. E. Khaikin, Theory of Oscillators, Pergamon Press, Oxford, UK, V. K. Mel nikov, On the stability of a center for time-periodic perturbations, Transactions of the Moscow Mathematical Society, vol., pp. 5, H. Bateman and A. Erdelyi, Table of Integrals Transforms. Vol., McGraw-Hill, New York, NY, USA, G. A. Korn and T. M. Korn, Mathematical Handbook for Scientists and Engineers, McGraw-Hill, New York, NY, USA, 96.
Citation Acta Mechanica Sinica/Lixue Xuebao, 2009, v. 25 n. 5, p The original publication is available at
 Title A hyperbolic Lindstedt-poincaré method for homoclinic motion of a kind of strongly nonlinear autonomous oscillators Author(s) Chen, YY; Chen, SH; Sze, KY Citation Acta Mechanica Sinica/Lixue Xuebao,
Title A hyperbolic Lindstedt-poincaré method for homoclinic motion of a kind of strongly nonlinear autonomous oscillators Author(s) Chen, YY; Chen, SH; Sze, KY Citation Acta Mechanica Sinica/Lixue Xuebao,
Difference Resonances in a controlled van der Pol-Duffing oscillator involving time. delay
 Difference Resonances in a controlled van der Pol-Duffing oscillator involving time delay This paper was published in the journal Chaos, Solitions & Fractals, vol.4, no., pp.975-98, Oct 9 J.C. Ji, N. Zhang,
Difference Resonances in a controlled van der Pol-Duffing oscillator involving time delay This paper was published in the journal Chaos, Solitions & Fractals, vol.4, no., pp.975-98, Oct 9 J.C. Ji, N. Zhang,
COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL PERIODIC FORCING TERMS
 International J. of Math. Sci. & Engg. Appls. (IJMSEA) ISSN 0973-9424, Vol. 9 No. III (September, 2015), pp. 197-210 COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL
International J. of Math. Sci. & Engg. Appls. (IJMSEA) ISSN 0973-9424, Vol. 9 No. III (September, 2015), pp. 197-210 COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Additive resonances of a controlled van der Pol-Duffing oscillator
 Additive resonances of a controlled van der Pol-Duffing oscillator This paper has been published in Journal of Sound and Vibration vol. 5 issue - 8 pp.-. J.C. Ji N. Zhang Faculty of Engineering University
Additive resonances of a controlled van der Pol-Duffing oscillator This paper has been published in Journal of Sound and Vibration vol. 5 issue - 8 pp.-. J.C. Ji N. Zhang Faculty of Engineering University
Two models for the parametric forcing of a nonlinear oscillator
 Nonlinear Dyn (007) 50:147 160 DOI 10.1007/s11071-006-9148-3 ORIGINAL ARTICLE Two models for the parametric forcing of a nonlinear oscillator Nazha Abouhazim Mohamed Belhaq Richard H. Rand Received: 3
Nonlinear Dyn (007) 50:147 160 DOI 10.1007/s11071-006-9148-3 ORIGINAL ARTICLE Two models for the parametric forcing of a nonlinear oscillator Nazha Abouhazim Mohamed Belhaq Richard H. Rand Received: 3
BIFURCATIONS OF PERIODIC ORBITS IN THREE-WELL DUFFING SYSTEM WITH A PHASE SHIFT
 J Syst Sci Complex (11 4: 519 531 BIFURCATIONS OF PERIODIC ORBITS IN THREE-WELL DUFFING SYSTEM WITH A PHASE SHIFT Jicai HUANG Han ZHANG DOI: 1.17/s1144-1-89-3 Received: 9 May 8 / Revised: 5 December 9
J Syst Sci Complex (11 4: 519 531 BIFURCATIONS OF PERIODIC ORBITS IN THREE-WELL DUFFING SYSTEM WITH A PHASE SHIFT Jicai HUANG Han ZHANG DOI: 1.17/s1144-1-89-3 Received: 9 May 8 / Revised: 5 December 9
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Entrainment Alex Bowie April 7, 2004
 Entrainment Alex Bowie April 7, 2004 Abstract The driven Van der Pol oscillator displays entrainment, quasiperiodicity, and chaos. The characteristics of these different modes are discussed as well as
Entrainment Alex Bowie April 7, 2004 Abstract The driven Van der Pol oscillator displays entrainment, quasiperiodicity, and chaos. The characteristics of these different modes are discussed as well as
NON-STATIONARY RESONANCE DYNAMICS OF THE HARMONICALLY FORCED PENDULUM
 CYBERNETICS AND PHYSICS, VOL. 5, NO. 3, 016, 91 95 NON-STATIONARY RESONANCE DYNAMICS OF THE HARMONICALLY FORCED PENDULUM Leonid I. Manevitch Polymer and Composite Materials Department N. N. Semenov Institute
CYBERNETICS AND PHYSICS, VOL. 5, NO. 3, 016, 91 95 NON-STATIONARY RESONANCE DYNAMICS OF THE HARMONICALLY FORCED PENDULUM Leonid I. Manevitch Polymer and Composite Materials Department N. N. Semenov Institute
Shilnikov bifurcations in the Hopf-zero singularity
 Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Nonlinear Dynamic Systems Homework 1
 Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Control of Chaos in Strongly Nonlinear Dynamic Systems
 Control of Chaos in Strongly Nonlinear Dynamic Systems Lev F. Petrov Plekhanov Russian University of Economics Stremianniy per., 36, 115998, Moscow, Russia lfp@mail.ru Abstract We consider the dynamic
Control of Chaos in Strongly Nonlinear Dynamic Systems Lev F. Petrov Plekhanov Russian University of Economics Stremianniy per., 36, 115998, Moscow, Russia lfp@mail.ru Abstract We consider the dynamic
Rotational Number Approach to a Damped Pendulum under Parametric Forcing
 Journal of the Korean Physical Society, Vol. 44, No. 3, March 2004, pp. 518 522 Rotational Number Approach to a Damped Pendulum under Parametric Forcing Eun-Ah Kim and K.-C. Lee Department of Physics,
Journal of the Korean Physical Society, Vol. 44, No. 3, March 2004, pp. 518 522 Rotational Number Approach to a Damped Pendulum under Parametric Forcing Eun-Ah Kim and K.-C. Lee Department of Physics,
Theoretical physics. Deterministic chaos in classical physics. Martin Scholtz
 Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
Daba Meshesha Gusu and O.Chandra Sekhara Reddy 1
 International Journal of Basic and Applied Sciences Vol. 4. No. 1 2015. Pp.22-27 Copyright by CRDEEP. All Rights Reserved. Full Length Research Paper Solutions of Non Linear Ordinary Differential Equations
International Journal of Basic and Applied Sciences Vol. 4. No. 1 2015. Pp.22-27 Copyright by CRDEEP. All Rights Reserved. Full Length Research Paper Solutions of Non Linear Ordinary Differential Equations
TWO VAN DER POL-DUFFING OSCILLATORS WITH HUYGENS COUPLING
 ENOC-8, Saint Petersburg, Russia, June, 3 July, 8 TWO VAN DER POL-DUFFING OSCILLATORS WITH HUYGENS COUPLING V.N. Belykh, E.V. Pankratova Mathematics Department Volga State Academy Nizhny Novgorod, 3, Russia.
ENOC-8, Saint Petersburg, Russia, June, 3 July, 8 TWO VAN DER POL-DUFFING OSCILLATORS WITH HUYGENS COUPLING V.N. Belykh, E.V. Pankratova Mathematics Department Volga State Academy Nizhny Novgorod, 3, Russia.
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Bifurcations of phase portraits of pendulum with vibrating suspension point
 Bifurcations of phase portraits of pendulum with vibrating suspension point arxiv:1605.09448v [math.ds] 9 Sep 016 A.I. Neishtadt 1,,, K. Sheng 1 1 Loughborough University, Loughborough, LE11 3TU, UK Space
Bifurcations of phase portraits of pendulum with vibrating suspension point arxiv:1605.09448v [math.ds] 9 Sep 016 A.I. Neishtadt 1,,, K. Sheng 1 1 Loughborough University, Loughborough, LE11 3TU, UK Space
Response of A Hard Duffing Oscillator to Harmonic Excitation An Overview
 INDIN INSTITUTE OF TECHNOLOGY, KHRGPUR 710, DECEMBER 8-0, 00 1 Response of Hard Duffing Oscillator to Harmonic Excitation n Overview.K. Mallik Department of Mechanical Engineering Indian Institute of Technology
INDIN INSTITUTE OF TECHNOLOGY, KHRGPUR 710, DECEMBER 8-0, 00 1 Response of Hard Duffing Oscillator to Harmonic Excitation n Overview.K. Mallik Department of Mechanical Engineering Indian Institute of Technology
Internal and external synchronization of self-oscillating oscillators with non-identical control parameters
 Internal and external synchronization of self-oscillating oscillators with non-identical control parameters Emelianova Yu.P., Kuznetsov A.P. Department of Nonlinear Processes, Saratov State University,
Internal and external synchronization of self-oscillating oscillators with non-identical control parameters Emelianova Yu.P., Kuznetsov A.P. Department of Nonlinear Processes, Saratov State University,
TORSION PENDULUM: THE MECHANICAL NONLINEAR OSCILLATOR
 TORSION PENDULUM: THE MECHANICAL NONLINEAR OSCILLATOR Samo Lasič, Gorazd Planinšič,, Faculty of Mathematics and Physics University of Ljubljana, Slovenija Giacomo Torzo, Department of Physics, University
TORSION PENDULUM: THE MECHANICAL NONLINEAR OSCILLATOR Samo Lasič, Gorazd Planinšič,, Faculty of Mathematics and Physics University of Ljubljana, Slovenija Giacomo Torzo, Department of Physics, University
Feedback Control and Stability of the Van der Pol Equation Subjected to External and Parametric Excitation Forces
 International Journal of Applied Engineering Research ISSN 973-456 Volume 3, Number 6 (8) pp. 377-3783 Feedback Control and Stability of the Van der Pol Equation Subjected to External and Parametric Excitation
International Journal of Applied Engineering Research ISSN 973-456 Volume 3, Number 6 (8) pp. 377-3783 Feedback Control and Stability of the Van der Pol Equation Subjected to External and Parametric Excitation
Research Article A Note on the Solutions of the Van der Pol and Duffing Equations Using a Linearisation Method
 Mathematical Problems in Engineering Volume 1, Article ID 693453, 1 pages doi:11155/1/693453 Research Article A Note on the Solutions of the Van der Pol and Duffing Equations Using a Linearisation Method
Mathematical Problems in Engineering Volume 1, Article ID 693453, 1 pages doi:11155/1/693453 Research Article A Note on the Solutions of the Van der Pol and Duffing Equations Using a Linearisation Method
Hopf Bifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators
 The Open Acoustics Journal 8 9-3 9 Open Access Hopf ifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators Jianping Cai *a and Jianhe Shen b a Department of
The Open Acoustics Journal 8 9-3 9 Open Access Hopf ifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators Jianping Cai *a and Jianhe Shen b a Department of
Invariant manifolds of the Bonhoeffer-van der Pol oscillator
 Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Exponentially small splitting of separatrices of the pendulum: two different examples. Marcel Guardia, Carme Olivé, Tere M-Seara
 Exponentially small splitting of separatrices of the pendulum: two different examples Marcel Guardia, Carme Olivé, Tere M-Seara 1 A fast periodic perturbation of the pendulum We consider a non-autonomous
Exponentially small splitting of separatrices of the pendulum: two different examples Marcel Guardia, Carme Olivé, Tere M-Seara 1 A fast periodic perturbation of the pendulum We consider a non-autonomous
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Research Article Variation of the Equator due to a Highly Inclined and Eccentric Disturber
 Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 009, Article ID 467865, 10 pages doi:10.1155/009/467865 Research Article Variation of the Equator due to a Highly Inclined and
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 009, Article ID 467865, 10 pages doi:10.1155/009/467865 Research Article Variation of the Equator due to a Highly Inclined and
Period-One Rotating Solutions of Horizontally Excited Pendulum Based on Iterative Harmonic Balance
 Advances in Pure Mathematics, 015, 5, 413-47 Published Online June 015 in Scies. http://www.scirp.org/journal/apm http://dx.doi.org/10.436/apm.015.58041 Period-One otating Solutions of Horizontally Excited
Advances in Pure Mathematics, 015, 5, 413-47 Published Online June 015 in Scies. http://www.scirp.org/journal/apm http://dx.doi.org/10.436/apm.015.58041 Period-One otating Solutions of Horizontally Excited
CHAOS -SOME BASIC CONCEPTS
 CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS
 POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
Stabilization of Hyperbolic Chaos by the Pyragas Method
 Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
Physics 235 Chapter 4. Chapter 4 Non-Linear Oscillations and Chaos
 Chapter 4 Non-Linear Oscillations and Chaos Non-Linear Differential Equations Up to now we have considered differential equations with terms that are proportional to the acceleration, the velocity, and
Chapter 4 Non-Linear Oscillations and Chaos Non-Linear Differential Equations Up to now we have considered differential equations with terms that are proportional to the acceleration, the velocity, and
Research Article Amplitude and Frequency Control: Stability of Limit Cycles in Phase-Shift and Twin-T Oscillators
 Hindawi Publishing Corporation Active and Passive Electronic Components Volume 008, Article ID 53968, 6 pages doi:0.55/008/53968 Research Article Amplitude and Frequency Control: Stability of Limit Cycles
Hindawi Publishing Corporation Active and Passive Electronic Components Volume 008, Article ID 53968, 6 pages doi:0.55/008/53968 Research Article Amplitude and Frequency Control: Stability of Limit Cycles
Research Article Adaptive Control of Chaos in Chua s Circuit
 Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
VAN DER POL SYSTEMS WITH VARIOUS RESTORING ELEMENTS
 Vietnam Journal of Mechanics, VAST, Vol. 28, No. 2 (2006), pp. 67-73 VAN DER POL SYSTEMS WITH VARIOUS RESTORING ELEMENTS NGUYEN VAN DINH AND TRAN KIM CHI Institute of Mechanics, VAST Abstract. Van der
Vietnam Journal of Mechanics, VAST, Vol. 28, No. 2 (2006), pp. 67-73 VAN DER POL SYSTEMS WITH VARIOUS RESTORING ELEMENTS NGUYEN VAN DINH AND TRAN KIM CHI Institute of Mechanics, VAST Abstract. Van der
In-Plane and Out-of-Plane Dynamic Responses of Elastic Cables under External and Parametric Excitations
 Applied Mathematics 5, 5(6): -4 DOI:.59/j.am.556. In-Plane and Out-of-Plane Dynamic Responses of Elastic Cables under External and Parametric Excitations Usama H. Hegazy Department of Mathematics, Faculty
Applied Mathematics 5, 5(6): -4 DOI:.59/j.am.556. In-Plane and Out-of-Plane Dynamic Responses of Elastic Cables under External and Parametric Excitations Usama H. Hegazy Department of Mathematics, Faculty
Weierstraß-Institut. für Angewandte Analysis und Stochastik. Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN
 Weierstraß-Institut für Angewandte Analysis und Stochastik Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN 198-8 Construction of generalized pendulum equations with prescribed maximum
Weierstraß-Institut für Angewandte Analysis und Stochastik Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN 198-8 Construction of generalized pendulum equations with prescribed maximum
Space flying vehicles orbital motion control system synthesis: power invariants
 CHAOS 010, 3rd Chaotic Modeling and Simulation 1-4 June 010 Space flying vehicles orbital motion control system synthesis: power invariants Alexander A. Kolesnikov (PhD) Taganrog Institute of Technology
CHAOS 010, 3rd Chaotic Modeling and Simulation 1-4 June 010 Space flying vehicles orbital motion control system synthesis: power invariants Alexander A. Kolesnikov (PhD) Taganrog Institute of Technology
Research Article Global Dynamics of a Competitive System of Rational Difference Equations in the Plane
 Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
EXACT DARK SOLITON, PERIODIC SOLUTIONS AND CHAOTIC DYNAMICS IN A PERTURBED GENERALIZED NONLINEAR SCHRODINGER EQUATION
 CANADIAN APPLIED MATHEMATICS QUARTERLY Volume 17, Number 1, Spring 9 EXACT DARK SOLITON, PERIODIC SOLUTIONS AND CHAOTIC DYNAMICS IN A PERTURBED GENERALIZED NONLINEAR SCHRODINGER EQUATION JIBIN LI ABSTRACT.
CANADIAN APPLIED MATHEMATICS QUARTERLY Volume 17, Number 1, Spring 9 EXACT DARK SOLITON, PERIODIC SOLUTIONS AND CHAOTIC DYNAMICS IN A PERTURBED GENERALIZED NONLINEAR SCHRODINGER EQUATION JIBIN LI ABSTRACT.
Chapter 14. Oscillations. Oscillations Introductory Terminology Simple Harmonic Motion:
 Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
Studies on Rayleigh Equation
 Johan Matheus Tuwankotta Studies on Rayleigh Equation Intisari Dalam makalah ini dipelajari persamaan oscilator tak linear yaitu persamaan Rayleigh : x x = µ ( ( x ) ) x. Masalah kestabilan lokal di sekitar
Johan Matheus Tuwankotta Studies on Rayleigh Equation Intisari Dalam makalah ini dipelajari persamaan oscilator tak linear yaitu persamaan Rayleigh : x x = µ ( ( x ) ) x. Masalah kestabilan lokal di sekitar
A Chaotic Phenomenon in the Power Swing Equation Umesh G. Vaidya R. N. Banavar y N. M. Singh March 22, 2000 Abstract Existence of chaotic dynamics in
 A Chaotic Phenomenon in the Power Swing Equation Umesh G. Vaidya R. N. Banavar y N. M. Singh March, Abstract Existence of chaotic dynamics in the classical swing equations of a power system of three interconnected
A Chaotic Phenomenon in the Power Swing Equation Umesh G. Vaidya R. N. Banavar y N. M. Singh March, Abstract Existence of chaotic dynamics in the classical swing equations of a power system of three interconnected
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
arxiv: v1 [nlin.cd] 20 Jul 2010
![arxiv: v1 [nlin.cd] 20 Jul 2010](/thumbs/92/109497388.jpg "arxiv: v1 [nlin.cd] 20 Jul 2010") Invariant manifolds of the Bonhoeffer-van der Pol oscillator arxiv:1007.3375v1 [nlin.cd] 20 Jul 2010 R. Benítez 1, V. J. Bolós 2 1 Departamento de Matemáticas, Centro Universitario de Plasencia, Universidad
Invariant manifolds of the Bonhoeffer-van der Pol oscillator arxiv:1007.3375v1 [nlin.cd] 20 Jul 2010 R. Benítez 1, V. J. Bolós 2 1 Departamento de Matemáticas, Centro Universitario de Plasencia, Universidad
Chapter 2 PARAMETRIC OSCILLATOR
 CHAPTER- Chapter PARAMETRIC OSCILLATOR.1 Introduction A simple pendulum consists of a mass m suspended from a string of length L which is fixed at a pivot P. When simple pendulum is displaced to an initial
CHAPTER- Chapter PARAMETRIC OSCILLATOR.1 Introduction A simple pendulum consists of a mass m suspended from a string of length L which is fixed at a pivot P. When simple pendulum is displaced to an initial
NONLINEAR DYNAMICS AND CHAOS. Numerical integration. Stability analysis
 LECTURE 3: FLOWS NONLINEAR DYNAMICS AND CHAOS Patrick E McSharr Sstems Analsis, Modelling & Prediction Group www.eng.o.ac.uk/samp patrick@mcsharr.net Tel: +44 83 74 Numerical integration Stabilit analsis
LECTURE 3: FLOWS NONLINEAR DYNAMICS AND CHAOS Patrick E McSharr Sstems Analsis, Modelling & Prediction Group www.eng.o.ac.uk/samp patrick@mcsharr.net Tel: +44 83 74 Numerical integration Stabilit analsis
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
Chaotic transport through the solar system
 The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
Self-Excited Vibration in Hydraulic Ball Check Valve
 Self-Excited Vibration in Hydraulic Ball Check Valve L. Grinis, V. Haslavsky, U. Tzadka Abstract This paper describes an experimental, theoretical model and numerical study of concentrated vortex flow
Self-Excited Vibration in Hydraulic Ball Check Valve L. Grinis, V. Haslavsky, U. Tzadka Abstract This paper describes an experimental, theoretical model and numerical study of concentrated vortex flow
Introduction to Flight Dynamics
 Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
SYNTHESIS OF SINEWAVE OSCILLATOR BASED ON THE MODIFIED VAN
 ELECTRONICS 7 19 1 September, Sozopol, BULGARIA SYNTHESIS OF SINEWAVE OSCILLATOR BASED ON THE MODIFIED VAN DER POL EQUATION USING MELNIKOV THEORY Zhivko Dimitrov Georgiev 1, Todor Georgiev Todorov, Emil
ELECTRONICS 7 19 1 September, Sozopol, BULGARIA SYNTHESIS OF SINEWAVE OSCILLATOR BASED ON THE MODIFIED VAN DER POL EQUATION USING MELNIKOV THEORY Zhivko Dimitrov Georgiev 1, Todor Georgiev Todorov, Emil
A Classical Approach to the Stark-Effect. Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University
 A Classical Approach to the Stark-Effect Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University Abstract The state of an atom in the presence of an external electric field is known
A Classical Approach to the Stark-Effect Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University Abstract The state of an atom in the presence of an external electric field is known
Fundamentals Physics. Chapter 15 Oscillations
 Fundamentals Physics Tenth Edition Halliday Chapter 15 Oscillations 15-1 Simple Harmonic Motion (1 of 20) Learning Objectives 15.01 Distinguish simple harmonic motion from other types of periodic motion.
Fundamentals Physics Tenth Edition Halliday Chapter 15 Oscillations 15-1 Simple Harmonic Motion (1 of 20) Learning Objectives 15.01 Distinguish simple harmonic motion from other types of periodic motion.
In Arnold s Mathematical Methods of Classical Mechanics (1), it
, it") Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
The Stick-Slip Vibration and Bifurcation of a Vibro-Impact System with Dry Friction
 Send Orders for Reprints to reprints@benthamscience.ae 308 The Open Mechanical Engineering Journal, 2014, 8, 308-313 Open Access The Stick-Slip Vibration and Bifurcation of a Vibro-Impact System with Dry
Send Orders for Reprints to reprints@benthamscience.ae 308 The Open Mechanical Engineering Journal, 2014, 8, 308-313 Open Access The Stick-Slip Vibration and Bifurcation of a Vibro-Impact System with Dry
Nonlinear Oscillators: Free Response
 20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
Physics 106b: Lecture 7 25 January, 2018
 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
2:2:1 Resonance in the Quasiperiodic Mathieu Equation
 Nonlinear Dynamics 31: 367 374, 003. 003 Kluwer Academic Publishers. Printed in the Netherlands. ::1 Resonance in the Quasiperiodic Mathieu Equation RICHARD RAND Department of Theoretical and Applied Mechanics,
Nonlinear Dynamics 31: 367 374, 003. 003 Kluwer Academic Publishers. Printed in the Netherlands. ::1 Resonance in the Quasiperiodic Mathieu Equation RICHARD RAND Department of Theoretical and Applied Mechanics,
Global analysis of the nonlinear Duffing-van der Pol type equation by a bifurcation theory and complete bifurcation groups method
 Global analysis of the nonlinear Duffing-van der Pol type equation by a bifurcation theory and complete bifurcation groups method Raisa Smirnova 1, Mikhail Zakrzhevsky 2, Igor Schukin 3 1, 3 Riga Technical
Global analysis of the nonlinear Duffing-van der Pol type equation by a bifurcation theory and complete bifurcation groups method Raisa Smirnova 1, Mikhail Zakrzhevsky 2, Igor Schukin 3 1, 3 Riga Technical
Method of Averaging for Differential Equations on an Infinite Interval
 Method of Averaging for Differential Equations on an Infinite Interval Theory and Applications SUB Gottingen 7 222 045 71X ;, ' Vladimir Burd Yaroslavl State University Yaroslavl, Russia 2 ' 08A14338 Contents
Method of Averaging for Differential Equations on an Infinite Interval Theory and Applications SUB Gottingen 7 222 045 71X ;, ' Vladimir Burd Yaroslavl State University Yaroslavl, Russia 2 ' 08A14338 Contents
13. Rigid Body Dynamics II
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 13. Rigid Body Dynamics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 13. Rigid Body Dynamics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Dynamics of Periodically Perturbed Homoclinic Solutions
 Dynamics of Periodically Perturbed Homoclinic Solutions Qiudong Wang University of Arizona Part I Structure of Homoclinic Tangles Unperturbed equation Let (x,y) R 2 be the phase variables. dx dt = αx+f(x,y),
Dynamics of Periodically Perturbed Homoclinic Solutions Qiudong Wang University of Arizona Part I Structure of Homoclinic Tangles Unperturbed equation Let (x,y) R 2 be the phase variables. dx dt = αx+f(x,y),
Singular Perturbation Theory for Homoclinic Orbits in a Class of Near-Integrable Hamiltonian Systems
 Singular Perturbation Theory for Homoclinic Orbits in a Class of Near-Integrable Hamiltonian Systems Gregor Kovačič Mathematical Sciences Department Rensselaer Polytechnic Institute Troy, NY 12180 Abstract
Singular Perturbation Theory for Homoclinic Orbits in a Class of Near-Integrable Hamiltonian Systems Gregor Kovačič Mathematical Sciences Department Rensselaer Polytechnic Institute Troy, NY 12180 Abstract
HORSESHOES CHAOS AND STABILITY OF A DELAYED VAN DER POL-DUFFING OSCILLATOR UNDER A BOUNDED DOUBLE WELL POTENTIAL
 Available at: http://publications.ictp.it IC/2009/040 United Nations Educational, Scientific and Cultural Organization and International Atomic Energy Agency THE ABDUS SALAM INTERNATIONAL CENTRE FOR THEORETICAL
Available at: http://publications.ictp.it IC/2009/040 United Nations Educational, Scientific and Cultural Organization and International Atomic Energy Agency THE ABDUS SALAM INTERNATIONAL CENTRE FOR THEORETICAL
MAS212 Assignment #2: The damped driven pendulum
 MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Periodic Orbits and Transport: Some Interesting Dynamics in the Three-Body Problem
 Periodic Orbits and Transport: Some Interesting Dynamics in the Three-Body Problem Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) CDS 280, January 8, 2001 shane@cds.caltech.edu
Periodic Orbits and Transport: Some Interesting Dynamics in the Three-Body Problem Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) CDS 280, January 8, 2001 shane@cds.caltech.edu
CANARDS AND HORSESHOES IN THE FORCED VAN DER POL EQUATION
 CANARDS AND HORSESHOES IN THE FORCED VAN DER POL EQUATION WARREN WECKESSER Department of Mathematics Colgate University Hamilton, NY 3346 E-mail: wweckesser@mail.colgate.edu Cartwright and Littlewood discovered
CANARDS AND HORSESHOES IN THE FORCED VAN DER POL EQUATION WARREN WECKESSER Department of Mathematics Colgate University Hamilton, NY 3346 E-mail: wweckesser@mail.colgate.edu Cartwright and Littlewood discovered
Two-Body Problem. Central Potential. 1D Motion
 Two-Body Problem. Central Potential. D Motion The simplest non-trivial dynamical problem is the problem of two particles. The equations of motion read. m r = F 2, () We already know that the center of
Two-Body Problem. Central Potential. D Motion The simplest non-trivial dynamical problem is the problem of two particles. The equations of motion read. m r = F 2, () We already know that the center of
Small Entry Probe Trajectories for Mars
 CubeSat (re-)entry can mean burning up in the atmosphere Here, we discuss surviving atmospheric entry We must model & understand flight dynamics, aerodynamics, heating Motivation for CubeSat entry Support
CubeSat (re-)entry can mean burning up in the atmosphere Here, we discuss surviving atmospheric entry We must model & understand flight dynamics, aerodynamics, heating Motivation for CubeSat entry Support
7 Pendulum. Part II: More complicated situations
 MATH 35, by T. Lakoba, University of Vermont 60 7 Pendulum. Part II: More complicated situations In this Lecture, we will pursue two main goals. First, we will take a glimpse at a method of Classical Mechanics
MATH 35, by T. Lakoba, University of Vermont 60 7 Pendulum. Part II: More complicated situations In this Lecture, we will pursue two main goals. First, we will take a glimpse at a method of Classical Mechanics
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Chapter 14 (Oscillations) Key concept: Downloaded from
 Key concept: Downloaded from") Chapter 14 (Oscillations) Multiple Choice Questions Single Correct Answer Type Q1. The displacement of a particle is represented by the equation. The motion of the particle is (a) simple harmonic with
Chapter 14 (Oscillations) Multiple Choice Questions Single Correct Answer Type Q1. The displacement of a particle is represented by the equation. The motion of the particle is (a) simple harmonic with
Introduction to Dynamical Systems Basic Concepts of Dynamics
 Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
CALCULATION OF NONLINEAR VIBRATIONS OF PIECEWISE-LINEAR SYSTEMS USING THE SHOOTING METHOD
 Vietnam Journal of Mechanics, VAST, Vol. 34, No. 3 (2012), pp. 157 167 CALCULATION OF NONLINEAR VIBRATIONS OF PIECEWISE-LINEAR SYSTEMS USING THE SHOOTING METHOD Nguyen Van Khang, Hoang Manh Cuong, Nguyen
Vietnam Journal of Mechanics, VAST, Vol. 34, No. 3 (2012), pp. 157 167 CALCULATION OF NONLINEAR VIBRATIONS OF PIECEWISE-LINEAR SYSTEMS USING THE SHOOTING METHOD Nguyen Van Khang, Hoang Manh Cuong, Nguyen
Transitioning to Chaos in a Simple Mechanical Oscillator
 Transitioning to Chaos in a Simple Mechanical Oscillator Hwan Bae Physics Department, The College of Wooster, Wooster, Ohio 69, USA (Dated: May 9, 8) We vary the magnetic damping, driver frequency, and
Transitioning to Chaos in a Simple Mechanical Oscillator Hwan Bae Physics Department, The College of Wooster, Wooster, Ohio 69, USA (Dated: May 9, 8) We vary the magnetic damping, driver frequency, and
On Universality of Transition to Chaos Scenario in Nonlinear Systems of Ordinary Differential Equations of Shilnikov s Type
 Journal of Applied Mathematics and Physics, 2016, 4, 871-880 Published Online May 2016 in SciRes. http://www.scirp.org/journal/jamp http://dx.doi.org/10.4236/jamp.2016.45095 On Universality of Transition
Journal of Applied Mathematics and Physics, 2016, 4, 871-880 Published Online May 2016 in SciRes. http://www.scirp.org/journal/jamp http://dx.doi.org/10.4236/jamp.2016.45095 On Universality of Transition
Dynamics of a mass-spring-pendulum system with vastly different frequencies
 Dynamics of a mass-spring-pendulum system with vastly different frequencies Hiba Sheheitli, hs497@cornell.edu Richard H. Rand, rhr2@cornell.edu Cornell University, Ithaca, NY, USA Abstract. We investigate
Dynamics of a mass-spring-pendulum system with vastly different frequencies Hiba Sheheitli, hs497@cornell.edu Richard H. Rand, rhr2@cornell.edu Cornell University, Ithaca, NY, USA Abstract. We investigate
Oscillatory Motion. Solutions of Selected Problems
 Chapter 15 Oscillatory Motion. Solutions of Selected Problems 15.1 Problem 15.18 (In the text book) A block-spring system oscillates with an amplitude of 3.50 cm. If the spring constant is 250 N/m and
Chapter 15 Oscillatory Motion. Solutions of Selected Problems 15.1 Problem 15.18 (In the text book) A block-spring system oscillates with an amplitude of 3.50 cm. If the spring constant is 250 N/m and
Connecting orbits in perturbed systems
 Noname manuscript No. (will be inserted by the editor) Connecting orbits in perturbed systems Fritz Colonius Thorsten Hüls Martin Rasmussen December 3, 8 Abstract We apply Newton s method in perturbed
Noname manuscript No. (will be inserted by the editor) Connecting orbits in perturbed systems Fritz Colonius Thorsten Hüls Martin Rasmussen December 3, 8 Abstract We apply Newton s method in perturbed
Physics Mechanics. Lecture 32 Oscillations II
 Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Oscillatory Motion and Wave Motion
 Oscillatory Motion and Wave Motion Oscillatory Motion Simple Harmonic Motion Wave Motion Waves Motion of an Object Attached to a Spring The Pendulum Transverse and Longitudinal Waves Sinusoidal Wave Function
Oscillatory Motion and Wave Motion Oscillatory Motion Simple Harmonic Motion Wave Motion Waves Motion of an Object Attached to a Spring The Pendulum Transverse and Longitudinal Waves Sinusoidal Wave Function
A Model of Evolutionary Dynamics with Quasiperiodic Forcing
 paper presented at Society for Experimental Mechanics (SEM) IMAC XXXIII Conference on Structural Dynamics February 2-5, 205, Orlando FL A Model of Evolutionary Dynamics with Quasiperiodic Forcing Elizabeth
paper presented at Society for Experimental Mechanics (SEM) IMAC XXXIII Conference on Structural Dynamics February 2-5, 205, Orlando FL A Model of Evolutionary Dynamics with Quasiperiodic Forcing Elizabeth
Research Article Periodic and Chaotic Motions of a Two-Bar Linkage with OPCL Controller
 Hindawi Publishing Corporation Mathematical Problems in Engineering Volume, Article ID 98639, 5 pages doi:.55//98639 Research Article Periodic and Chaotic Motions of a Two-Bar Linkage with OPCL Controller
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume, Article ID 98639, 5 pages doi:.55//98639 Research Article Periodic and Chaotic Motions of a Two-Bar Linkage with OPCL Controller
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Stabilization of Angular Velocity of Asymmetrical Rigid Body. Using Two Constant Torques
 Stabilization of Angular Velocity of Asymmetrical Rigid Body Using Two Constant Torques Hirohisa Kojima Associate Professor Department of Aerospace Engineering Tokyo Metropolitan University 6-6, Asahigaoka,
Stabilization of Angular Velocity of Asymmetrical Rigid Body Using Two Constant Torques Hirohisa Kojima Associate Professor Department of Aerospace Engineering Tokyo Metropolitan University 6-6, Asahigaoka,
Dynamical behaviour of a controlled vibro-impact system
 Vol 17 No 7, July 2008 c 2008 Chin. Phys. Soc. 1674-1056/2008/17(07)/2446-05 Chinese Physics B and IOP Publishing Ltd Dynamical behaviour of a controlled vibro-impact system Wang Liang( ), Xu Wei( ), and
Vol 17 No 7, July 2008 c 2008 Chin. Phys. Soc. 1674-1056/2008/17(07)/2446-05 Chinese Physics B and IOP Publishing Ltd Dynamical behaviour of a controlled vibro-impact system Wang Liang( ), Xu Wei( ), and
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
Nonlinear Oscillations and Chaos
 CHAPTER 4 Nonlinear Oscillations and Chaos 4-. l l = l + d s d d l l = l + d m θ m (a) (b) (c) The unetended length of each spring is, as shown in (a). In order to attach the mass m, each spring must be
CHAPTER 4 Nonlinear Oscillations and Chaos 4-. l l = l + d s d d l l = l + d m θ m (a) (b) (c) The unetended length of each spring is, as shown in (a). In order to attach the mass m, each spring must be