René Thomas Université de Bruxelles. Frontier diagrams: a global view of the structure of phase space.
|
|
|
- Dina Kelley
- 5 years ago
- Views:
Transcription
1 René Thomas Université de Bruxelles Frontier diagrams: a global view of the structure of phase space.
2 We have the tools to identify and characterise steady states and trajectories. But WHY several steady states? WHY lasting periodicity? WHY deterministic chaos? HOW to synthesise a system with the desired characters?
3 The logical structure is built-in the JACOBIAN MATRIX (or in the graph of influence) of the system. All this talk will deal with the idea that much of the dynamics of a system can be understood from a careful analysis of its Jacobian matrix.
4 1.Biological background 2.From Jacobian matrix to circuits to nuclei 3.Preliminary qualitative approach 4.From Jacobian matrix to eigenvalues and eigenvectors 5.Frontier diagrams: partition of phase space (signs of the eigenvalues). 6.Auxiliary frontiers (slopes of the ( eigenvectors 7. A single steady state per domain??? 8.How many variables?
5 1. Biological background
6 Epigenetic differences : differences heritable from cell to cell generation in the absence of genetic differences. Differentiation is an epigenetic process since all cells of an organism contain its whole genome ( 1952 ) Cf Briggs & King Wilmut et al.(1997): Dolly.
7 ( 1949 ) Max Delbruck ( words (in other Epigenetic differences, including those involved in cell differentiation, can be understood in terms of multiple steady states (or, more precisely, of multiple attractors). A necessary condition for the occurrence of multiple steady states: the presence of a positive circuit in the interaction graph of the system (Thomas-Soulé, ).
8 Conclusion: any model for a differentiative process must involve a positive circuit. In fact, a positive circuit not only allows for a choice between two stable regimes, but it can render permanent the action of a transient signal. Cf Cell differentiation. Discussion? Similarly, homeostatic processes, and in particular stable steady states, stable periodicity or a chaotic attractor, require a negative retroaction circuit.
9 The interest of studying biological and other complex systems in terms of circuits.
10 2. From Jacobian matrix to circuits and nuclei
11 Many systems can be described by ordinary differential equations: x = f x (x, y,z,...) y = f y (x, y,z,...) z = f z (x, y,z,...)...
12 or, more generally, x i = f i (x 1,x 2,...,x i,... x n ), (i, 1..., n)
13 Steady states The steady state equations are: dx/dt = f x (x, y,z...) = 0 dy/dt = f y (x, y,z...) = 0 dz/dt = f z (x, y,z...) = 0... Steady states are defined, as usual, as the REAL roots of the steady state equations
14 Jacobian matrix The matrix of the partial derivatives: j = "f i ij "x j
15 This matrix shows whether and how variables i and j interact: if j ij is non-zero it means that j influences the evolution of i, and one can then draw the graph j " i
16 Circuits # " j Let 12 " & % ( in which j 12, j 23 and j 31 " " j 23 are non-zero % ( terms. $ j 31 " " ' Since : j 12 non-zero implies the link x 2 -> x 1, j 23 non-zero implies the link x 3 -> x 2 and j 31 non-zero implies the link x 3 -> x 1, thus, we have x 1 -> x 3 -> x 2 -> x 1 : A CIRCUIT
17 More generally: a circuit is defined from a set of non-zero terms of the Jacobian matrix whose row (i) and column (j) indices can form a circular permutation: # % % $ " j 12 " " " j 23 j 31 " " & ( (, ' # % % $ " j 12 "& ( j 21 " " (, " " "' # % % $ j 11 " "& ( " " " ( " " "' a 3-circuit a 2-circuit an 1-circuit
18 Crucial role of circuits Only those terms of the Jacobian matrix that belong to a circuit are present in the characteristic equation, and thus only those terms that belong to a circuit influence the nature of steady states.
19 Nuclei Nuclei are circuits (or unions or disjoint circuits) that involve all the variables of the system, for example: # % % $ " j 12 " " " j 23 j31 " " & ( (, ' # % % $ " j 12 " & ( j 21 " " (, " " j 33 ' # % % $ j 11 " " & ( " j 22 " (,... " " j 33 '
20 Crucial role of nuclei The nuclei are nothing else than the terms of the determinant of the Jacobian matrix. Thus, in the absence of any nucleus, the system has no (nondegenerate) steady state. Each isolated nucleus generates one or more steady states, whose nature is determined by the sign pattern of the nucleus.
21 3.Preliminary qualitative approach based on the sign patterns of nuclei
22 Different sign patterns of the nuclei generate (in 2D) SADDLE POINTS with contrasting orientations...
23 ...or NODES, stable: $ " # ' & ) % # "( or unstable: # + " & % ( $ " + '
24 ...or FOCI, stable or unstable, that run $ " + ' Clockwise: & ) %# " ( or counter-clockwise: $ " #' & ) % + " (
25 System A x = 0.2x + y " y 3 y = x " x 3 " 0.3y
26 Jacobian matrix of system A # 0.2 1" 3y 2 % $ 1" 3x 2 "0.3 & ( '
27 For small absolute values of x (more precisely, x < 1/ ), the term 1-3x 2 is positive, outside it is negative, and similarly for y. Thus, phase space is cut into 3 2 = 9 boxes as regards the sign patterns of the 2-nucleus. (Provisionally reasoned in terms of the 2-nucleus, as if it were alone. Justification? -> Discussion.
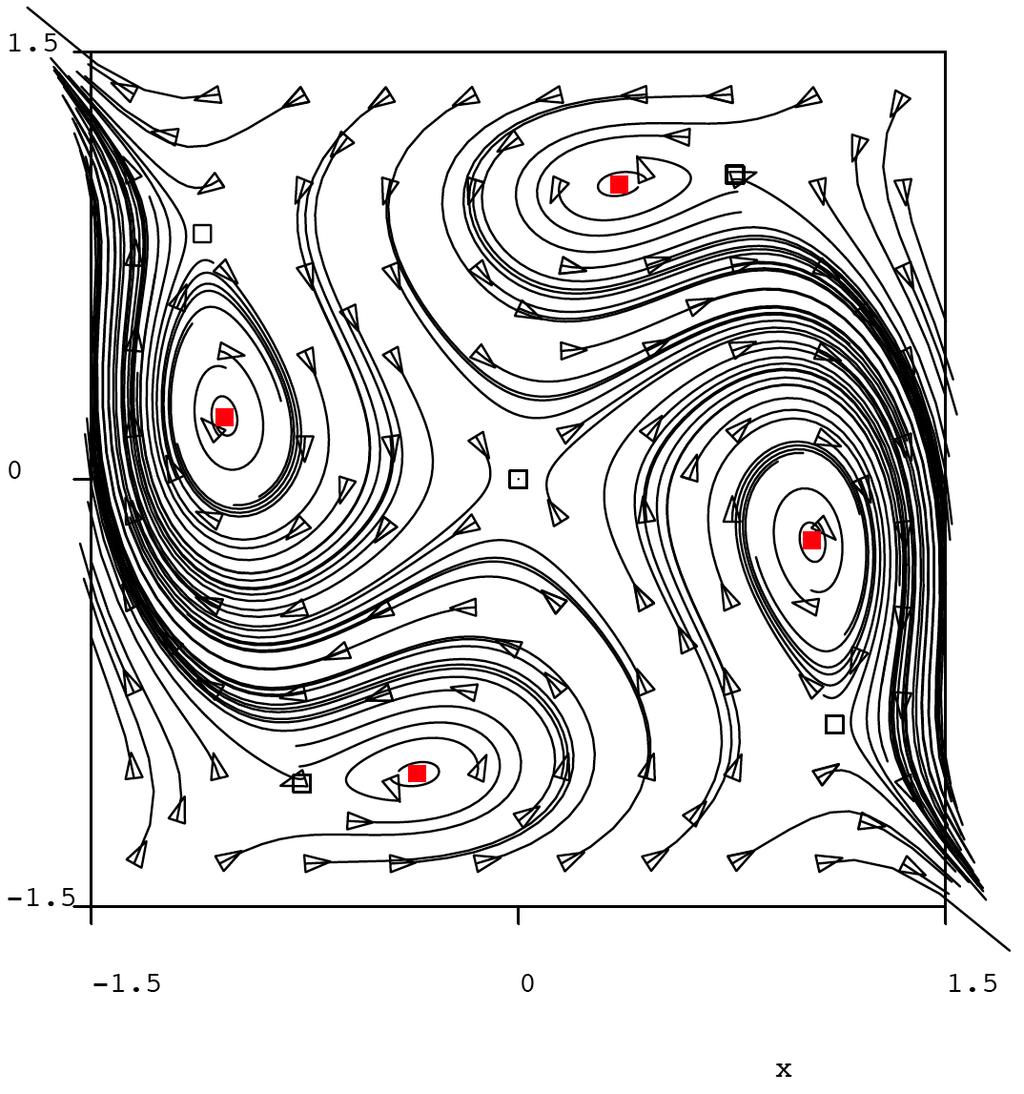
28 The sign patterns of the 2- nucleus in system A $ " #' $ " # ' $ " # ' & )& )& ) %# " (% + " (%# " ( $ " + ' & %# " ( $ " + ' )& % + " ( $ " + ' )& ) %# " ( $ " #' $ " # ' $ " # ' & )& )& ) %# " (% + " (%# " (
29
30 The following dia shows trajectories and steady states (stable: red squares, unstable: empty squares). The nature of the steady states is exactly as expected from the preliminary, qualitative, analysis (in particular, the orientations of the separatrices of the saddle points and the clockwise vs counter clockwise rotation of the trajectories around the foci)
31
32 4. From Jacobian matrix to eigenvalues and eigenvectors.
33 Eigenvalues Like any matrix, the jacobian matrix J can be characterized by its eigenvalues. Det(J " I#) = 0 is the «characteristic equation» of matrix J (I is the identity matrix) and the eigenvalues are the values of lambda for which that equation has non-trivial roots, this is, for which the determinant of the characteristic equation is nil.
34 Physical meaning of the eigenvalues In nonlinear systems, the eigenvalues are of course functions of the location in phase space. The signs of the eigenvalues tell whether a direction is attractive (-) or repulsive (+), and characterize thus the nature of the steady states.
35 " + + means # $ % an unstable node & & ' ' means % $ # a stable node "
36 " # + means $ % & a saddle point '
37 Complex eigenvalues " Periodic motion / + + " an unstable focus / # # " a stable focus
38 Eigenvectors Once the characteristic equation solved in lambda, the solutions in x, y, z are the eigenvectors of matrix J. Physical meaning of the eigenvectors: Orientation of the flow near steady states
39 5. FRONTIERS Phase space can be partitioned according to the signs of the eigenvalues (and if required, to the slopes of the eigenvectors). This provides a global view of the structure of phase space.
40 System B x = "x + x 3 " 0.2y 2 y = 0.3x 2 + y " y 3
41 Jacobian matrix of system B #"1+ 3x 2 "0.2y % $ +0.3x 1" 3y 2 & ( '
42 ( green ) Frontier F1 First step: partition according to the sign of the product (P) of the eigenvalues. As P = det[j], the equation of F1 is simply Det[J] = 0, and this, whatever the number of variables. In white, the positive regions (det[j] > 0 In gray, the negative regions (det[j] < 0
43
44 ( blue ) Frontier F2 In order to partition according to the signs of the eigenvalues (and not only to the sign of their product) one needs a second frontier. Frontier F2 is a variety (in 2D, a line) along which the real part of complex eigenvalues is nil. In 2D, F2 is defined by j 11 + j 22 = 0, with the constraint det[j] > 0
45
46 From now on each domain is homogeneous as regards the signs of the eigenvalues. This means that the signs of the eigenvalues of any steady state that would be present in a domain are determined by its very location in this domain.
47
48 ( dotted Boundary F4 (red, However, one still does not distinguish a pair of complex conjugate eigenvalues from a pair of real values of the same sign (/ + + from ++, or / - - from - -). Boundary F4 deals a domain according to the presence or absence of complex conjugate eigenvalues.
49 The equation of F4 is of course d = 0, in which d is the discriminant of the characteristic equation.
50
51 This diagram applies not only to system B proper, but as well to any system that differ from it only by non-zero terms in the ODE s. All these systems share the same Jacobian matrix, and thus the same frontiers, but the number and location of the steady states depend on the non-zero terms. For system B proper, the steady states are as follows:
52
53 It can be checked that the nature of the steady states is exactly as expected from the preliminary qualitative approach.
54 Note that there is no steady state in the complex crescents. Would it be possible to move a steady state to one of these regions? In fact, adding zero-order terms in the ODE's does not alter the Jacobian matrix, but changes the location of steady states, and in this way any point of phase space can be rendered steady.
55 In order to render any point, say {x 0, y 0 }, steady, it suffices to add proper zero-order terms to the ODE s: x = f x (x,y)" k, with k = f x (x 0,y 0 ) y = f y (x,y)" m, with m = f y (x 0,y 0 )
56 In the present case, to render point {0.15, 0.8} steady, one puts k = f x (0.15, 0.8) = m = f y (0.15, 0.8) =
57
58 In the present case, two steady states are present in one of the complex crescents. One of them is a stable focus, the other one, an unstable focus, as expected from their location.
59 When one adds a zero-order term to one of the ODE s, pairs of steady states converge, eventually collide and vanish, replaced by a pair of complex roots of the steady state equations (a bifurcation, as seen in phase space).
60
61 6. Auxiliary frontiers based on the slopes of the eigenvectors ( 2D (so far only in
62 For short, adjacent steady states of the same «species» (same signs of the eigenvalues) can usually be separated by additional, auxiliary frontiers based on the slopes of the eigenvectors.
63 In 2 dimensions ( 0 = (F2 : j 11 +j 22 F3: j 11 - j 22 =0 F5: j 12 +j 21 =0 F6: j 12 - j 21 =0 correspond to various relative slopes of the eigenvectors (opposite, inverse and normal, respectively).
64
65 The three saddle points on the diagonal are generated by different sign patterns of the (1+1)-nucleus, and consequently their separatrices display contrasting orientations. These steady states (and their regions) can be separated by an F3 frontier (j 11 - j 22 = 0).
66
67 Consider now system B: x = 0.2x 2 + y " y 3 y = x " x 3 " 0.2y 2 Whose Jacobian matrix is: # 0.4 x 1" 3y 2 & % $ 1" 3x 2 ( "0.4y '


68
69 In the preceding dia, one sees (frow N-W to S-E): - two stable foci that have to run one clockwise, the other counter clockwise - three saddle points with contrasting orientations - two unstable foci, one clockwise, the other counterclockwise. - All these steady states can be separated from each other by F5 (mauve) or F6 (turquoise) frontiers.
70
71 7. A single steady state per domain???
72 In most cases the frontiers partition phase space in such a way that all steady states are separated from each other, as if two adjacent steady states had to differ either by the signs of their eigenvalues or by the slopes of their eigenvectors (= as if each domain was a nest for a unique potential steady state).
73 In fact, I have a counter-example (two stable foci that are not separated by the partition process: Either the idea : not more than a single steady state per domain is incorrect Or there is still a frontier lacking
74 x = 0.6xy + y " y y = x " x xy Whose Jacobian matrix is: # 0.6y 0.6x +1" 3y 2 & % 1" 3x 2 ( $ + 0.4y 0.4x '
75
76 8.How many variables?
77 The major frontiers F1, F2 and F4 are in principle computable for n variables, although the process is heavier and heavier as n increases.
78 A diagram has to be visualised in 2 or at most 3-D. General case: a tomography using 2D sections of the nd phase space. BUT... if only 2 variables «carry» a nonlinearity, an n-dimensional system reduces to a 2-dimensional diagram.
79 Probably not useful for the top-down approach (I hope) very useful for the bottom-up approach.
80 RESERVE
81 Synthetic mode. A new type of deterministic chaos ( labyrinth chaos ).
82 Deterministic chaos can be described in a simple way as an extension of periodicity such that the trajectories never close up. More accurately, they are characterised by at least one positive Lyapunov exponent (an extension of the concept of eigenvalues). We have all reasons to believe that a necessary condition for a chaotic behaviour is the presence of at least a positive circuit (for multistationarity) and a negative circuit (for periodicity).
83 In nonlinear systems, terms of the Jacobian matrix, and thus circuits can be positive or negative depending to the location in phase space ( ambiguous circuits ). Is it then possible to generate deterministic chaos with a single circuit, provided it is ambiguous? Yes.
84 x = "bx + y " y 3 y = "by + z " z 3 z = "bz + x " x 3 Whose Jacobian matrix is: $ "b 1" 3y 2 # ' & # "b 1" 3z 2 ) & ) & % 1" 3x 2 ) # "b (
85 The sign of 1-3x 2 is + for small absolute values of x (more precisely, x < 1/ ), negative elsewhere, and similarly for y and z. Phase space is thus partitioned into 3 3 = 27 boxes according to the sign patterns of the 3-circuit. For sufficiently low values of the unique parameter b there are 3 3 = 27 steady states, all unstable.
86
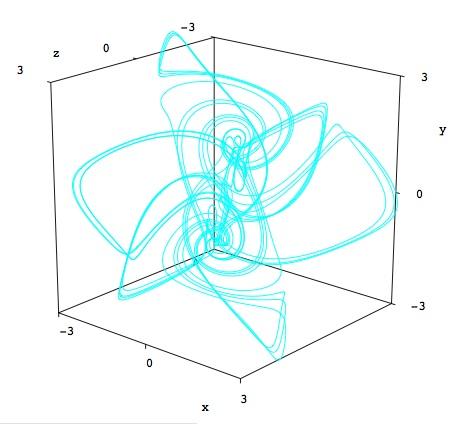
87 The trajectories are chaotic (one or two chaotic attractors) with periodic windows (up to 6 limit cycles). So far we have not only a 3-circuit, but in addition three 1-circuits (the diagonal terms of the Jacobian matrix).
88 In fact, x-x 3 is a gross caricature of sin(x): the first two terms of the Taylor development are x-x 3 /3!) x = "bx + sin y y = "by + sinz z = "bz + sin x $ "b cos y # ' & ) # "b cosz & ) % cos x # "b (
89 In this system, as the unique parameter b decreases the number of steady states (all unstable) steadily increases, as well as the size and complexity of the attractors. The trajectories are chaotic (up to 6 chaotic ( cycles attractors) with periodic windows (up to 6 limit For b = 0 (now, a single circuit), there are an infinity of steady states that occupy the totality of phase space. There are no more attractors. Instead, the trajectories are chaotic (but not random) walks throughout phase space (labyrinth chaos)
90 Analogy with a big bang ( gros boum ( French in
91 RESERVE
92 I mentioned above that in system A the 2-nucleus is dominant almost everywhere in phase space. What does it mean? The weight of a nucleus can be measured as the absolute value of the product of the elements of the Jacobian matrix that constitute this nucleus. Along the line j 11 j 22 = j 12 j 21 the two nucleii of a 2-D system have the same weight, on one side of the line the2-nucleus dominates, on the other side, it is the (1+1)-nucleus.
93
94 Two bacterial cultures genetically identical and in identical condition may develop durably (>150 cell generations) different phenotypes if one of them has been submitted to a brief signal (brief presence of an inducer ): probably the most beautiful case of epigenetic differences... and multistationarity.
Introduction to Dynamical Systems Basic Concepts of Dynamics
 Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Chaos. Dr. Dylan McNamara people.uncw.edu/mcnamarad
 Chaos Dr. Dylan McNamara people.uncw.edu/mcnamarad Discovery of chaos Discovered in early 1960 s by Edward N. Lorenz (in a 3-D continuous-time model) Popularized in 1976 by Sir Robert M. May as an example
Chaos Dr. Dylan McNamara people.uncw.edu/mcnamarad Discovery of chaos Discovered in early 1960 s by Edward N. Lorenz (in a 3-D continuous-time model) Popularized in 1976 by Sir Robert M. May as an example
... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré
 Chapter 2 Dynamical Systems... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré One of the exciting new fields to arise out
Chapter 2 Dynamical Systems... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré One of the exciting new fields to arise out
Lesson 4: Non-fading Memory Nonlinearities
 Lesson 4: Non-fading Memory Nonlinearities Nonlinear Signal Processing SS 2017 Christian Knoll Signal Processing and Speech Communication Laboratory Graz University of Technology June 22, 2017 NLSP SS
Lesson 4: Non-fading Memory Nonlinearities Nonlinear Signal Processing SS 2017 Christian Knoll Signal Processing and Speech Communication Laboratory Graz University of Technology June 22, 2017 NLSP SS
THREE DIMENSIONAL SYSTEMS. Lecture 6: The Lorenz Equations
 THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
+ i. cos(t) + 2 sin(t) + c 2.
 + 2 sin(t) + c 2.") MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
ENGI 9420 Lecture Notes 4 - Stability Analysis Page Stability Analysis for Non-linear Ordinary Differential Equations
 ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Project 1 Modeling of Epidemics
 532 Chapter 7 Nonlinear Differential Equations and tability ection 7.5 Nonlinear systems, unlike linear systems, sometimes have periodic solutions, or limit cycles, that attract other nearby solutions.
532 Chapter 7 Nonlinear Differential Equations and tability ection 7.5 Nonlinear systems, unlike linear systems, sometimes have periodic solutions, or limit cycles, that attract other nearby solutions.
Is the Hénon map chaotic
 Is the Hénon map chaotic Zbigniew Galias Department of Electrical Engineering AGH University of Science and Technology, Poland, galias@agh.edu.pl International Workshop on Complex Networks and Applications
Is the Hénon map chaotic Zbigniew Galias Department of Electrical Engineering AGH University of Science and Technology, Poland, galias@agh.edu.pl International Workshop on Complex Networks and Applications
Dynamical analysis and circuit simulation of a new three-dimensional chaotic system
 Dynamical analysis and circuit simulation of a new three-dimensional chaotic system Wang Ai-Yuan( 王爱元 ) a)b) and Ling Zhi-Hao( 凌志浩 ) a) a) Department of Automation, East China University of Science and
Dynamical analysis and circuit simulation of a new three-dimensional chaotic system Wang Ai-Yuan( 王爱元 ) a)b) and Ling Zhi-Hao( 凌志浩 ) a) a) Department of Automation, East China University of Science and
A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term
 ETASR - Engineering, Technology & Applied Science Research Vol., o.,, 9-5 9 A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term Fei Yu College of Information Science
ETASR - Engineering, Technology & Applied Science Research Vol., o.,, 9-5 9 A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term Fei Yu College of Information Science
MULTISTABILITY IN A BUTTERFLY FLOW
 International Journal of Bifurcation and Chaos, Vol. 23, No. 12 (2013) 1350199 (10 pages) c World Scientific Publishing Company DOI: 10.1142/S021812741350199X MULTISTABILITY IN A BUTTERFLY FLOW CHUNBIAO
International Journal of Bifurcation and Chaos, Vol. 23, No. 12 (2013) 1350199 (10 pages) c World Scientific Publishing Company DOI: 10.1142/S021812741350199X MULTISTABILITY IN A BUTTERFLY FLOW CHUNBIAO
Calculus for the Life Sciences II Assignment 6 solutions. f(x, y) = 3π 3 cos 2x + 2 sin 3y
 = 3π 3 cos 2x + 2 sin 3y") Calculus for the Life Sciences II Assignment 6 solutions Find the tangent plane to the graph of the function at the point (0, π f(x, y = 3π 3 cos 2x + 2 sin 3y Solution: The tangent plane of f at a point
Calculus for the Life Sciences II Assignment 6 solutions Find the tangent plane to the graph of the function at the point (0, π f(x, y = 3π 3 cos 2x + 2 sin 3y Solution: The tangent plane of f at a point
Computer Problems for Methods of Solving Ordinary Differential Equations
 Computer Problems for Methods of Solving Ordinary Differential Equations 1. Have a computer make a phase portrait for the system dx/dt = x + y, dy/dt = 2y. Clearly indicate critical points and separatrices.
Computer Problems for Methods of Solving Ordinary Differential Equations 1. Have a computer make a phase portrait for the system dx/dt = x + y, dy/dt = 2y. Clearly indicate critical points and separatrices.
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Edward Lorenz. Professor of Meteorology at the Massachusetts Institute of Technology
 The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
Lecture 6. Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of:
 Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
Are numerical studies of long term dynamics conclusive: the case of the Hénon map
 Journal of Physics: Conference Series PAPER OPEN ACCESS Are numerical studies of long term dynamics conclusive: the case of the Hénon map To cite this article: Zbigniew Galias 2016 J. Phys.: Conf. Ser.
Journal of Physics: Conference Series PAPER OPEN ACCESS Are numerical studies of long term dynamics conclusive: the case of the Hénon map To cite this article: Zbigniew Galias 2016 J. Phys.: Conf. Ser.
An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory
 An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory INA TARALOVA-ROUX AND ORLA FEELY Department of Electronic and Electrical Engineering University
An Analysis of Nondifferentiable Models of and DPCM Systems From the Perspective of Noninvertible Map Theory INA TARALOVA-ROUX AND ORLA FEELY Department of Electronic and Electrical Engineering University
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland
 FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll
 Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll Safieddine Bouali To cite this version: Safieddine Bouali. Basins of Attraction Plasticity of a Strange Attractor with a Swirling
Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll Safieddine Bouali To cite this version: Safieddine Bouali. Basins of Attraction Plasticity of a Strange Attractor with a Swirling
6.2 Brief review of fundamental concepts about chaotic systems
 6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
Chapter 2 Chaos theory and its relationship to complexity
 Chapter 2 Chaos theory and its relationship to complexity David Kernick This chapter introduces chaos theory and the concept of non-linearity. It highlights the importance of reiteration and the system
Chapter 2 Chaos theory and its relationship to complexity David Kernick This chapter introduces chaos theory and the concept of non-linearity. It highlights the importance of reiteration and the system
Systems of Linear ODEs
 P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
dynamical zeta functions: what, why and what are the good for?
 dynamical zeta functions: what, why and what are the good for? Predrag Cvitanović Georgia Institute of Technology November 2 2011 life is intractable in physics, no problem is tractable I accept chaos
dynamical zeta functions: what, why and what are the good for? Predrag Cvitanović Georgia Institute of Technology November 2 2011 life is intractable in physics, no problem is tractable I accept chaos
MITOCW ocw f99-lec23_300k
 MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
Modelling and Mathematical Methods in Process and Chemical Engineering
 Modelling and Mathematical Methods in Process and Chemical Engineering Solution Series 3 1. Population dynamics: Gendercide The system admits two steady states The Jacobi matrix is ẋ = (1 p)xy k 1 x ẏ
Modelling and Mathematical Methods in Process and Chemical Engineering Solution Series 3 1. Population dynamics: Gendercide The system admits two steady states The Jacobi matrix is ẋ = (1 p)xy k 1 x ẏ
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
3.3. SYSTEMS OF ODES 1. y 0 " 2y" y 0 + 2y = x1. x2 x3. x = y(t) = c 1 e t + c 2 e t + c 3 e 2t. _x = A x + f; x(0) = x 0.
 = c 1 e t + c 2 e t + c 3 e 2t. _x = A x + f; x(0) = x 0.") .. SYSTEMS OF ODES. Systems of ODEs MATH 94 FALL 98 PRELIM # 94FA8PQ.tex.. a) Convert the third order dierential equation into a rst oder system _x = A x, with y " y" y + y = x = @ x x x b) The equation
.. SYSTEMS OF ODES. Systems of ODEs MATH 94 FALL 98 PRELIM # 94FA8PQ.tex.. a) Convert the third order dierential equation into a rst oder system _x = A x, with y " y" y + y = x = @ x x x b) The equation
The Big Picture. Discuss Examples of unpredictability. Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986)
 Chaos, Scientific American (1986)") The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
Math 1553, Introduction to Linear Algebra
 Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
Math 1270 Honors ODE I Fall, 2008 Class notes # 14. x 0 = F (x; y) y 0 = G (x; y) u 0 = au + bv = cu + dv
 y 0 = G (x; y) u 0 = au + bv = cu + dv") Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Introduction Knot Theory Nonlinear Dynamics Topology in Chaos Open Questions Summary. Topology in Chaos
 Introduction Knot Theory Nonlinear Dynamics Open Questions Summary A tangled tale about knot, link, template, and strange attractor Centre for Chaos & Complex Networks City University of Hong Kong Email:
Introduction Knot Theory Nonlinear Dynamics Open Questions Summary A tangled tale about knot, link, template, and strange attractor Centre for Chaos & Complex Networks City University of Hong Kong Email:
Chapter #4 EEE8086-EEE8115. Robust and Adaptive Control Systems
 Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
REVIEW OF DIFFERENTIAL CALCULUS
 REVIEW OF DIFFERENTIAL CALCULUS DONU ARAPURA 1. Limits and continuity To simplify the statements, we will often stick to two variables, but everything holds with any number of variables. Let f(x, y) be
REVIEW OF DIFFERENTIAL CALCULUS DONU ARAPURA 1. Limits and continuity To simplify the statements, we will often stick to two variables, but everything holds with any number of variables. Let f(x, y) be
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
More Details Fixed point of mapping is point that maps into itself, i.e., x n+1 = x n.
 More Details Fixed point of mapping is point that maps into itself, i.e., x n+1 = x n. If there are points which, after many iterations of map then fixed point called an attractor. fixed point, If λ
More Details Fixed point of mapping is point that maps into itself, i.e., x n+1 = x n. If there are points which, after many iterations of map then fixed point called an attractor. fixed point, If λ
Nonsmooth systems: synchronization, sliding and other open problems
 John Hogan Bristol Centre for Applied Nonlinear Mathematics, University of Bristol, England Nonsmooth systems: synchronization, sliding and other open problems 2 Nonsmooth Systems 3 What is a nonsmooth
John Hogan Bristol Centre for Applied Nonlinear Mathematics, University of Bristol, England Nonsmooth systems: synchronization, sliding and other open problems 2 Nonsmooth Systems 3 What is a nonsmooth
Qualitative Analysis of Tumor-Immune ODE System
 of Tumor-Immune ODE System LG de Pillis and AE Radunskaya August 15, 2002 This work was supported in part by a grant from the WM Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1 Simplified System of
of Tumor-Immune ODE System LG de Pillis and AE Radunskaya August 15, 2002 This work was supported in part by a grant from the WM Keck Foundation 0-0 QUALITATIVE ANALYSIS Overview 1 Simplified System of
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Co-existence of Regular and Chaotic Motions in the Gaussian Map
 EJTP 3, No. 13 (2006) 29 40 Electronic Journal of Theoretical Physics Co-existence of Regular and Chaotic Motions in the Gaussian Map Vinod Patidar Department of Physics, Banasthali Vidyapith Deemed University,
EJTP 3, No. 13 (2006) 29 40 Electronic Journal of Theoretical Physics Co-existence of Regular and Chaotic Motions in the Gaussian Map Vinod Patidar Department of Physics, Banasthali Vidyapith Deemed University,
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS
 International Journal of Bifurcation and Chaos, Vol 9, No 11 (1999) 19 4 c World Scientific Publishing Company STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS ZBIGNIEW
International Journal of Bifurcation and Chaos, Vol 9, No 11 (1999) 19 4 c World Scientific Publishing Company STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS ZBIGNIEW
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Simple Chaotic Oscillator: From Mathematical Model to Practical Experiment
 6 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL Simple Chaotic Oscillator: From Mathematical Model to Practical Experiment Jiří PERŽELA, Zdeněk KOLKA, Stanislav HANUS Dept.
6 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL Simple Chaotic Oscillator: From Mathematical Model to Practical Experiment Jiří PERŽELA, Zdeněk KOLKA, Stanislav HANUS Dept.
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
Is chaos possible in 1d? - yes - no - I don t know. What is the long term behavior for the following system if x(0) = π/2?
 = π/2?") Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Constructing a chaotic system with any number of equilibria
 Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Chapter 4. Transition towards chaos. 4.1 One-dimensional maps
 Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
Vectors, matrices, eigenvalues and eigenvectors
 Vectors, matrices, eigenvalues and eigenvectors 1 ( ) ( ) ( ) Scaling a vector: 0.5V 2 0.5 2 1 = 0.5 = = 1 0.5 1 0.5 ( ) ( ) ( ) ( ) Adding two vectors: V + W 2 1 2 + 1 3 = + = = 1 3 1 + 3 4 ( ) ( ) a
Vectors, matrices, eigenvalues and eigenvectors 1 ( ) ( ) ( ) Scaling a vector: 0.5V 2 0.5 2 1 = 0.5 = = 1 0.5 1 0.5 ( ) ( ) ( ) ( ) Adding two vectors: V + W 2 1 2 + 1 3 = + = = 1 3 1 + 3 4 ( ) ( ) a
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
Math 216 Final Exam 24 April, 2017
 Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
5.3 METABOLIC NETWORKS 193. P (x i P a (x i )) (5.30) i=1
) (5.30) i=1") 5.3 METABOLIC NETWORKS 193 5.3 Metabolic Networks 5.4 Bayesian Networks Let G = (V, E) be a directed acyclic graph. We assume that the vertices i V (1 i n) represent for example genes and correspond to
5.3 METABOLIC NETWORKS 193 5.3 Metabolic Networks 5.4 Bayesian Networks Let G = (V, E) be a directed acyclic graph. We assume that the vertices i V (1 i n) represent for example genes and correspond to
The Sine Map. Jory Griffin. May 1, 2013
 The Sine Map Jory Griffin May, 23 Introduction Unimodal maps on the unit interval are among the most studied dynamical systems. Perhaps the two most frequently mentioned are the logistic map and the tent
The Sine Map Jory Griffin May, 23 Introduction Unimodal maps on the unit interval are among the most studied dynamical systems. Perhaps the two most frequently mentioned are the logistic map and the tent
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
ENGI Linear Approximation (2) Page Linear Approximation to a System of Non-Linear ODEs (2)
 Page Linear Approximation to a System of Non-Linear ODEs (2)") ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Discrete Dynamical Systems
 Discrete Dynamical Systems Justin Allman Department of Mathematics UNC Chapel Hill 18 June 2011 What is a discrete dynamical system? Definition A Discrete Dynamical System is a mathematical way to describe
Discrete Dynamical Systems Justin Allman Department of Mathematics UNC Chapel Hill 18 June 2011 What is a discrete dynamical system? Definition A Discrete Dynamical System is a mathematical way to describe
Period-doubling cascades of a Silnikov equation
 Period-doubling cascades of a Silnikov equation Keying Guan and Beiye Feng Science College, Beijing Jiaotong University, Email: keying.guan@gmail.com Institute of Applied Mathematics, Academia Sinica,
Period-doubling cascades of a Silnikov equation Keying Guan and Beiye Feng Science College, Beijing Jiaotong University, Email: keying.guan@gmail.com Institute of Applied Mathematics, Academia Sinica,
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form
 Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Various lecture notes for
 Various lecture notes for 18385. R. R. Rosales. Department of Mathematics, Massachusetts Institute of Technology, Cambridge, Massachusetts, MA 02139. September 17, 2012 Abstract Notes, both complete and/or
Various lecture notes for 18385. R. R. Rosales. Department of Mathematics, Massachusetts Institute of Technology, Cambridge, Massachusetts, MA 02139. September 17, 2012 Abstract Notes, both complete and/or
Environmental Physics Computer Lab #8: The Butterfly Effect
 Environmental Physics Computer Lab #8: The Butterfly Effect The butterfly effect is the name coined by Lorenz for the main feature of deterministic chaos: sensitivity to initial conditions. Lorenz has
Environmental Physics Computer Lab #8: The Butterfly Effect The butterfly effect is the name coined by Lorenz for the main feature of deterministic chaos: sensitivity to initial conditions. Lorenz has
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Autonomous Systems and Stability
 LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
Chem 3502/4502 Physical Chemistry II (Quantum Mechanics) 3 Credits Spring Semester 2006 Christopher J. Cramer. Lecture 22, March 20, 2006
 3 Credits Spring Semester 2006 Christopher J. Cramer. Lecture 22, March 20, 2006") Chem 350/450 Physical Chemistry II Quantum Mechanics 3 Credits Spring Semester 006 Christopher J. Cramer Lecture, March 0, 006 Some material in this lecture has been adapted from Cramer, C. J. Essentials
Chem 350/450 Physical Chemistry II Quantum Mechanics 3 Credits Spring Semester 006 Christopher J. Cramer Lecture, March 0, 006 Some material in this lecture has been adapted from Cramer, C. J. Essentials
Chapitre 4. Transition to chaos. 4.1 One-dimensional maps
 Chapitre 4 Transition to chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different manners
Chapitre 4 Transition to chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different manners
LYAPUNOV EXPONENT AND DIMENSIONS OF THE ATTRACTOR FOR TWO DIMENSIONAL NEURAL MODEL
 Volume 1, No. 7, July 2013 Journal of Global Research in Mathematical Archives RESEARCH PAPER Available online at http://www.jgrma.info LYAPUNOV EXPONENT AND DIMENSIONS OF THE ATTRACTOR FOR TWO DIMENSIONAL
Volume 1, No. 7, July 2013 Journal of Global Research in Mathematical Archives RESEARCH PAPER Available online at http://www.jgrma.info LYAPUNOV EXPONENT AND DIMENSIONS OF THE ATTRACTOR FOR TWO DIMENSIONAL
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
MAS212 Assignment #2: The damped driven pendulum
 MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
Electrons! Chapter 5, Part 2
 Electrons! Chapter 5, Part 2 3. Contained within sublevels are orbitals: pairs of electrons each having a different space or region they occupy a. Each sublevel contains certain orbitals: i. s sublevel
Electrons! Chapter 5, Part 2 3. Contained within sublevels are orbitals: pairs of electrons each having a different space or region they occupy a. Each sublevel contains certain orbitals: i. s sublevel
Mathematical Model of Forced Van Der Pol s Equation
 Mathematical Model of Forced Van Der Pol s Equation TO Tsz Lok Wallace LEE Tsz Hong Homer December 9, Abstract This work is going to analyze the Forced Van Der Pol s Equation which is used to analyze the
Mathematical Model of Forced Van Der Pol s Equation TO Tsz Lok Wallace LEE Tsz Hong Homer December 9, Abstract This work is going to analyze the Forced Van Der Pol s Equation which is used to analyze the
Deterministic Chaos Lab
 Deterministic Chaos Lab John Widloski, Robert Hovden, Philip Mathew School of Physics, Georgia Institute of Technology, Atlanta, GA 30332 I. DETERMINISTIC CHAOS LAB This laboratory consists of three major
Deterministic Chaos Lab John Widloski, Robert Hovden, Philip Mathew School of Physics, Georgia Institute of Technology, Atlanta, GA 30332 I. DETERMINISTIC CHAOS LAB This laboratory consists of three major
THE SEPARATRIX FOR A SECOND ORDER ORDINARY DIFFERENTIAL EQUATION OR A 2 2 SYSTEM OF FIRST ORDER ODE WHICH ALLOWS A PHASE PLANE QUANTITATIVE ANALYSIS
 THE SEPARATRIX FOR A SECOND ORDER ORDINARY DIFFERENTIAL EQUATION OR A SYSTEM OF FIRST ORDER ODE WHICH ALLOWS A PHASE PLANE QUANTITATIVE ANALYSIS Maria P. Skhosana and Stephan V. Joubert, Tshwane University
THE SEPARATRIX FOR A SECOND ORDER ORDINARY DIFFERENTIAL EQUATION OR A SYSTEM OF FIRST ORDER ODE WHICH ALLOWS A PHASE PLANE QUANTITATIVE ANALYSIS Maria P. Skhosana and Stephan V. Joubert, Tshwane University
Stable and Unstable Manifolds for Planar Dynamical Systems
 Stable and Unstable Manifolds for Planar Dynamical Systems H.L. Smith Department of Mathematics Arizona State University Tempe, AZ 85287 184 October 7, 211 Key words and phrases: Saddle point, stable and
Stable and Unstable Manifolds for Planar Dynamical Systems H.L. Smith Department of Mathematics Arizona State University Tempe, AZ 85287 184 October 7, 211 Key words and phrases: Saddle point, stable and
A simple electronic circuit to demonstrate bifurcation and chaos
 A simple electronic circuit to demonstrate bifurcation and chaos P R Hobson and A N Lansbury Brunel University, Middlesex Chaos has generated much interest recently, and many of the important features
A simple electronic circuit to demonstrate bifurcation and chaos P R Hobson and A N Lansbury Brunel University, Middlesex Chaos has generated much interest recently, and many of the important features
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
CHAOTIC ANALYSIS OF MERIDIONAL CIRCULATION OVER SOUTHEAST ASIA BY A FORCED MERIDIONAL-VERTICAL SYSTEM IN THE CASE OF FX = 0, FY = RF AND FZ = 0
 CHAOTIC ANALYSIS OF MERIDIONAL CIRCULATION OVER SOUTHEAST ASIA BY A FORCED MERIDIONAL-VERTICAL SYSTEM IN THE CASE OF FX = 0, FY = RF AND FZ = 0 NATTAPONG WAREEPRASIRT, 2 DUSADEE SUKAWAT,2 Department of
CHAOTIC ANALYSIS OF MERIDIONAL CIRCULATION OVER SOUTHEAST ASIA BY A FORCED MERIDIONAL-VERTICAL SYSTEM IN THE CASE OF FX = 0, FY = RF AND FZ = 0 NATTAPONG WAREEPRASIRT, 2 DUSADEE SUKAWAT,2 Department of
Differential Dynamics in Terms of Jacobian Loops
 Differential Dynamics in Terms of Jacobian Loops B. Toni CRM-2715 February 2001 CRM, Université of Montréal, Montréal, Canada and Facultad de Ciencias, UAEM, Cuernavaca 62210, Morelos, Mexico toni@crm.umontreal.ca
Differential Dynamics in Terms of Jacobian Loops B. Toni CRM-2715 February 2001 CRM, Université of Montréal, Montréal, Canada and Facultad de Ciencias, UAEM, Cuernavaca 62210, Morelos, Mexico toni@crm.umontreal.ca