Physics 351 Monday, April 3, 2017
|
|
|
- Marian Ashley Mosley
- 5 years ago
- Views:
Transcription
1 Physics 351 Monday, April 3, 2017 This weekend you read Chapter 11 (coupled oscillators, normal modes, etc.), but it will take us another day or two to finish Chapter 10 in class: Euler angles; Lagrangian description of symmetric top; space cone, body cone, etc. for torque-free symmetric top. We ll do a quiz this Wednesday (HW9), since we ve skipped 2 weeks in a row. FYI intuitive description of precession:
2
3 Torque-free precession of symmetric top (more on this later): As seen from body frame, ω precesses about ê 3 with frequency Ω. As seen from the body frame, what does L do? What does the situation look like from the space frame?
4 As seen from body frame, L and ω precess about (fixed) ê 3 with frequency Ω b Ω = ω 3 (λ λ 3 )/λ, where λ = λ 1 = λ 2. As seen from the space frame, ê 3 and ω precess about (fixed) L, at a frequency that takes some effort to calculate. (You ll calculate the space-frame precession frequency in HW11/problem 3.)
5 Video from two 2015 students traveling back from spring break: Astronaut version: Cosmonaut version (!): Dzhanibekov effect Someone s quasi-intuitive explanation: the-dzhanibekov-effect-an-exercise-in-mechanics-or-fiction-explain-mathemat
6 When we speak of L, we speak of it as calculated in the inertial space frame. Of course, according to an observer in the body frame, the body is not spinning, but since we mean the inertially calculated value L, an observer in the body frame still sees this vector change direction, so it has a nonzero value and a nonzero derivative. The body frame at any given time relates to the space frame through the Euler angles. (On a separate topic:) I d love to see a walkthrough on the Euler axes just to be sure I understand. When we talk about L, we almost always mean L as calculated in a non-rotating frame. We can then at any time t project the vector L onto the instantaneous ê 1, ê 2, ê 3, axes. This is what we do if we want to use the Euler equations, which refer to the ê 1, ê 2, ê 3 projections of the ω and L that we calculate in the space frame. One notable exception was the coin in HW10/q8. In that case, we had our choice of calculating L in the lab frame or in the turntable frame. Either way we calculated L, we would find ( ) ( ) dl dl = + Ω L dt dt lab frame turntable frame
7 One useful tool for relating the fixed ˆx, ŷ, ẑ axes to the rigid body s ê 1, ê 2, ê 3, axes is the Euler angles, φ, θ, ψ. (Another way, which I used in the simulation program for the struck triangle, is simply to keep track instant-by-instant of the x, y, z components of ê 1 (t), ê 2 (t), ê 3 (t). But if you re given the three Euler angles, you can compute the x, y, z components of the body axes ê 1, ê 2, ê 3.) Question: Suppose I rotate the vector (x, y) = R(cos α, sin α) by an angle φ (about the origin). How would you write x as a linear combination of x and y? How about y as a linear combination of x and y?
8
9 Mnemonic: for infinitessimal rotation angle ɛ 1, r r + ɛˆn r. So for rotation about ŷ, (1, 0, 0) (1, 0, ɛ), since ɛŷ ˆx = ɛẑ.
10 The hardest part of writing down 3 3 rotation matrices is remembering where to put the minus sign. Once you ve worked out one case correctly (e.g. from a diagram), here s a trick (thanks to 2015 student Adam Zachar) for working out the other two...

11 Just add two more columns and two more rows, following the cycles: xyz, yzx, zxy. Then draw boxes of size 3 3.
12 (Check previous result using Mathematica.)
13 Euler angles: can move (x, y, z) axes to arbitrary orientation.
14
15 Suppose the Euler angles φ, θ, ψ vary with time, as the body orientation changes w.r.t. the space frame s fixed x, y, z axes. I ll write out more steps than Taylor does, and I may confuse you by saying (ˆx, ŷ, ẑ) (ê 1, ê 2, ê 3 ) (ê 1, ê 2, ê 3 ) (ê 1, ê 2, ê 3 ). I do this so that my (ê 1, ê 2, ê 3 ) are the same as Taylor s. 1. Rotate by φ about ẑ ê 1, ê 2. (ê 3 = ẑ.) 2. Rotate by θ about ê 2 ê 1, ê 3. (ê 2 = ê 2.) 3. Rotate by ψ about ê 3 ê 1, ê 2. (ê 3 = ê 3.) ω = φ ẑ + θ ê 2 + ψ ê 3 = φ ẑ + θ ê 2 + ψ ê 3 Next, project ω onto more convenient sets of unit vectors. Note: ω is a vector, but ω is not the rate of change of any vector. Infinitesimal rotations commute, but finite rotations do not.
16
17 In the space basis [proof on previous page]: ω = ( θ sin φ+ ψ sin θ cos φ)ˆx + ( θ cos φ+ ψ sin θ sin φ)ŷ + ( φ+ ψ cos θ)ẑ In the body basis [proof on next page]: ω = ( φ sin θ cos ψ+ θ sin ψ)ê 1 + ( φ sin θ sin ψ+ θ cos ψ)ê 2 + ( φ cos θ+ ψ)ê 3 Most convenient for symmetric top (λ 1 = λ 2 ): in the primed basis (i.e. before the final rotation by ψ about ê 3 ). Note that ê 3 = ê 3. ω = ( φ sin θ)ê 1 + ( θ)ê 2 + ( φ cos θ + ψ)ê 3 This last one is easiest to see if you consider the instant at which ψ = 0.

18
19 Most convenient for symmetric top (λ 1 = λ 2 ): ω = ( φ sin θ)ê 1 + ( θ)ê 2 + ( φ cos θ + ψ)ê 3 Now, how do we write the top s angular momentum L and kinetic energy T? How about the Lagrangian?
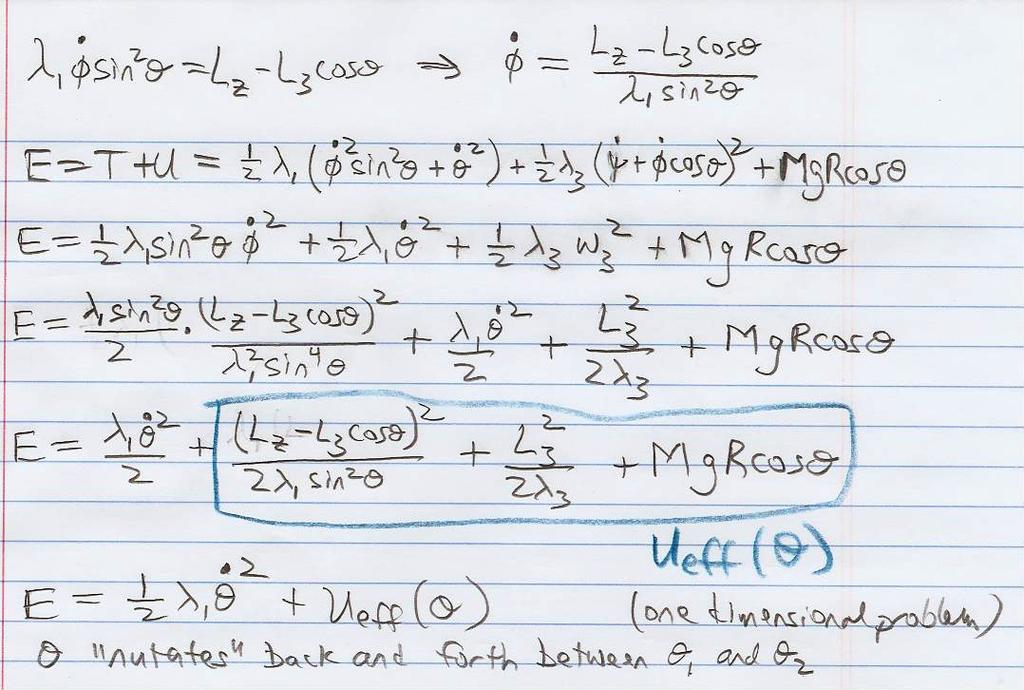
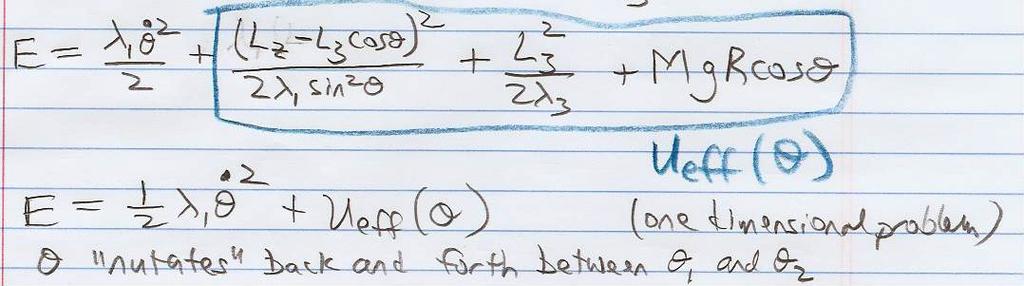
20 Most convenient for symmetric top (λ 1 = λ 2 ): ω = ( φ sin θ)ê 1 + ( θ)ê 2 + ( φ cos θ + ψ)ê 3 Now, how do we write the top s angular momentum L and kinetic energy T? How about the Lagrangian? L = ( λ 1 φ sin θ)ê 1 + (λ 1 θ)ê 2 + λ 3 ( φ cos θ + ψ)ê 3 T = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) λ 3( φ cos θ + ψ) 2 L = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) λ 3( φ cos θ + ψ) 2 MgR cos θ Which coordinates (Euler angles) are ignorable? What are the corresponding conserved momenta?
ê 3 L = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) + 1 2 λ 3( φ cos θ + ψ) 2 MgR cos")
21 ω = ( φ sin θ)ê 1 + ( θ)ê 2 + ( φ cos θ + ψ)ê 3 L = ( λ 1 φ sin θ)ê 1 + (λ 1 θ)ê 2 + λ 3 ( φ cos θ + ψ)ê 3 L = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) λ 3( φ cos θ + ψ) 2 MgR cos θ
 2 MgR cos")
22 L = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) λ 3( φ cos θ + ψ) 2 MgR cos θ

23
24 (Skip: Just in case you wanted to see the θ EOM derived.) L = 1 2 λ 1( φ 2 sin 2 θ + θ 2 ) λ 3( φ cos θ + ψ) 2 MgR cos θ
25
26
27 From the final exam for the course I took, fall (This turns out to be the same problem as appears in Feynman s story of the cafeteria plate that wobbles as it flies through the air.)
28 As seen from body frame, L and ω precess about (fixed) ê 3 with frequency Ω b Ω = ω 3 (λ λ 3 )/λ, where λ = λ 1 = λ 2. As seen from the space frame, ê 3 and ω precess about (fixed) L, at frequency Ω s = L/λ 1, which you ll prove in HW11/problem 3.
29 (a) Show that I = I 0 and find the constant I 0. (b) Calculate L at t = (c) Sketch ê 3, ω, and L at t = 0. (d) Draw/label body cone and space cone on your sketch.
30 (e) Calculate precession frequencies Ω body and Ω space. Indicate directions of precession vectors Ω body and Ω space on drawing. (f) You argue in HW11 that Ω space = Ω body + ω. Verify (by writing out components) that this relationship holds for the Ω space and Ω body that you calculate for t = 0.
31 (g) Find the maximum angle between ẑ and ê 3 during subsequent motion of the plate. Show that in the limit α 1, this maximum angle equals α. (h) When is this maximum deviation first reached? video: watch?v=oh-dlrifo10
32 (Taylor 10.35) A rigid body consists of: m at (a, 0, 0) = a(1, 0, 0) 2m at (0, a, a) = a(0, 1, 1) 3m at (0, a, a) = a(0, 1, 1) Find inertia tensor I, its principal moments, and the principal axes.
33
34
35
36
37
38 Physics 351 Monday, April 3, 2017 This weekend you read Chapter 11 (coupled oscillators, normal modes, etc.), but it will take us another day or two to finish Chapter 10 in class: Euler angles; Lagrangian description of symmetric top; space cone, body cone, etc. for torque-free symmetric top. We ll do a quiz this Wednesday (HW9), since we ve skipped 2 weeks in a row. FYI intuitive description of precession:
Physics 351 Wednesday, April 4, 2018
 Physics 351 Wednesday, April 4, 2018 Pick up worksheet (!) on your way in. HW10 due this Friday. I tried (!) to make it short. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm.
Physics 351 Wednesday, April 4, 2018 Pick up worksheet (!) on your way in. HW10 due this Friday. I tried (!) to make it short. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm.
Physics 351 Friday, April 7, 2017
 Physics 351 Friday, April 7, 2017 Turn in HW11 today. Handing out HW12 due next Friday. The only homework you ll do on last weekend s Chapter 11 (coupled oscillators, normal modes, etc.) is solving the
Physics 351 Friday, April 7, 2017 Turn in HW11 today. Handing out HW12 due next Friday. The only homework you ll do on last weekend s Chapter 11 (coupled oscillators, normal modes, etc.) is solving the
Physics 351 review session
 Physics 351 review session 2018-04-29 Final exam: Thursday, May 3, 9am 11am, DRL A2. Covers chapters 7,9,10,13. One hand-written 3 5 card OK. Turn in your 3 5 card with your exam. HW5,7,9,10,11,12 all
Physics 351 review session 2018-04-29 Final exam: Thursday, May 3, 9am 11am, DRL A2. Covers chapters 7,9,10,13. One hand-written 3 5 card OK. Turn in your 3 5 card with your exam. HW5,7,9,10,11,12 all
Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017
 Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2015, Final Exam.
 Physics 351, Spring 2015, Final Exam. This closed-book exam has (only) 25% weight in your course grade. You can use one sheet of your own hand-written notes. Please show your work on these pages. The back
Physics 351, Spring 2015, Final Exam. This closed-book exam has (only) 25% weight in your course grade. You can use one sheet of your own hand-written notes. Please show your work on these pages. The back
Physics 351 Wednesday, April 22, 2015
 Physics 351 Wednesday, April 22, 2015 HW13 due Friday. The last one! You read Taylor s Chapter 16 this week (waves, stress, strain, fluids), most of which is Phys 230 review. Next weekend, you ll read
Physics 351 Wednesday, April 22, 2015 HW13 due Friday. The last one! You read Taylor s Chapter 16 this week (waves, stress, strain, fluids), most of which is Phys 230 review. Next weekend, you ll read
Physics 312, Winter 2007, Practice Final
 Physics 312, Winter 2007, Practice Final Time: Two hours Answer one of Question 1 or Question 2 plus one of Question 3 or Question 4 plus one of Question 5 or Question 6. Each question carries equal weight.
Physics 312, Winter 2007, Practice Final Time: Two hours Answer one of Question 1 or Question 2 plus one of Question 3 or Question 4 plus one of Question 5 or Question 6. Each question carries equal weight.
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 351 Wednesday, March 1, 2017
 Physics 351 Wednesday, March 1, 2017 HW7 due this Friday. Over spring break, you ll read 10.1 10.7 of Ch 10 (rigid body rotation). A copy of this Ch 10 is on Canvas so that you don t need to take your
Physics 351 Wednesday, March 1, 2017 HW7 due this Friday. Over spring break, you ll read 10.1 10.7 of Ch 10 (rigid body rotation). A copy of this Ch 10 is on Canvas so that you don t need to take your
Lab #4 - Gyroscopic Motion of a Rigid Body
 Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Classical Mechanics III (8.09) Fall 2014 Assignment 3
 Fall 2014 Assignment 3") Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Physics 351 Wednesday, February 21, 2018
 Physics 351 Wednesday, February 21, 2018 HW5 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. It is often convenient to treat the inertial (pseudo)force F inertial
Physics 351 Wednesday, February 21, 2018 HW5 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. It is often convenient to treat the inertial (pseudo)force F inertial
Physics 351, Spring 2018, Homework #9. Due at start of class, Friday, March 30, 2018
 Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Physics 121, March 27, Angular Momentum, Torque, and Precession. Department of Physics and Astronomy, University of Rochester
 Physics 121, March 27, 2008. Angular Momentum, Torque, and Precession. Physics 121. March 27, 2008. Course Information Quiz Topics to be discussed today: Review of Angular Momentum Conservation of Angular
Physics 121, March 27, 2008. Angular Momentum, Torque, and Precession. Physics 121. March 27, 2008. Course Information Quiz Topics to be discussed today: Review of Angular Momentum Conservation of Angular
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
27. Euler s Equations
 27 Euler s Equations Michael Fowler Introduction We ve just seen that by specifying the rotational direction and the angular phase of a rotating body using Euler s angles, we can write the Lagrangian in
27 Euler s Equations Michael Fowler Introduction We ve just seen that by specifying the rotational direction and the angular phase of a rotating body using Euler s angles, we can write the Lagrangian in
Problem 1. Mathematics of rotations
 Problem 1. Mathematics of rotations (a) Show by algebraic means (i.e. no pictures) that the relationship between ω and is: φ, ψ, θ Feel free to use computer algebra. ω X = φ sin θ sin ψ + θ cos ψ (1) ω
Problem 1. Mathematics of rotations (a) Show by algebraic means (i.e. no pictures) that the relationship between ω and is: φ, ψ, θ Feel free to use computer algebra. ω X = φ sin θ sin ψ + θ cos ψ (1) ω
Dynamics 12e. Copyright 2010 Pearson Education South Asia Pte Ltd. Chapter 20 3D Kinematics of a Rigid Body
 Engineering Mechanics: Dynamics 12e Chapter 20 3D Kinematics of a Rigid Body Chapter Objectives Kinematics of a body subjected to rotation about a fixed axis and general plane motion. Relative-motion analysis
Engineering Mechanics: Dynamics 12e Chapter 20 3D Kinematics of a Rigid Body Chapter Objectives Kinematics of a body subjected to rotation about a fixed axis and general plane motion. Relative-motion analysis
Euler s Theorem: An arbitrary rotation may be expressed as the product of 3 successive rotations about 3 (in general) different axes.
 different axes.") 11.4 Euler s Angles So far we ve managed to make quite a lot of progress working just with the angular velocity ω a and we haven t needed to introduce an explicit parametrization of the configuration space
11.4 Euler s Angles So far we ve managed to make quite a lot of progress working just with the angular velocity ω a and we haven t needed to introduce an explicit parametrization of the configuration space
PHYS 705: Classical Mechanics. Euler s Equations
 1 PHYS 705: Classical Mechanics Euler s Equations 2 Euler s Equations (set up) We have seen how to describe the kinematic properties of a rigid body. Now, we would like to get equations of motion for it.
1 PHYS 705: Classical Mechanics Euler s Equations 2 Euler s Equations (set up) We have seen how to describe the kinematic properties of a rigid body. Now, we would like to get equations of motion for it.
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
3-D Kinetics of Rigid Bodies
 3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
12. Rigid Body Dynamics I
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 015 1. Rigid Body Dynamics I Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 015 1. Rigid Body Dynamics I Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Understanding Precession
 University of Rochester PHY35 Term Paper Understanding Precession Author: Peter Heuer Professor: Dr. Douglas Cline December 1th 01 1 Introduction Figure 1: Bicycle wheel gyroscope demonstration used at
University of Rochester PHY35 Term Paper Understanding Precession Author: Peter Heuer Professor: Dr. Douglas Cline December 1th 01 1 Introduction Figure 1: Bicycle wheel gyroscope demonstration used at
Part 8: Rigid Body Dynamics
 Document that contains homework problems. Comment out the solutions when printing off for students. Part 8: Rigid Body Dynamics Problem 1. Inertia review Find the moment of inertia for a thin uniform rod
Document that contains homework problems. Comment out the solutions when printing off for students. Part 8: Rigid Body Dynamics Problem 1. Inertia review Find the moment of inertia for a thin uniform rod
Lecture 41: Highlights
 Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
Lecture 37: Principal Axes, Translations, and Eulerian Angles
 Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
Physics 351 Wednesday, February 28, 2018
 Physics 351 Wednesday, February 28, 2018 HW6 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. To get the most benefit from the homework, first work through every
Physics 351 Wednesday, February 28, 2018 HW6 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. To get the most benefit from the homework, first work through every
Physics 342 Lecture 27. Spin. Lecture 27. Physics 342 Quantum Mechanics I
 Physics 342 Lecture 27 Spin Lecture 27 Physics 342 Quantum Mechanics I Monday, April 5th, 2010 There is an intrinsic characteristic of point particles that has an analogue in but no direct derivation from
Physics 342 Lecture 27 Spin Lecture 27 Physics 342 Quantum Mechanics I Monday, April 5th, 2010 There is an intrinsic characteristic of point particles that has an analogue in but no direct derivation from
ME 230: Kinematics and Dynamics Spring 2014 Section AD. Final Exam Review: Rigid Body Dynamics Practice Problem
 ME 230: Kinematics and Dynamics Spring 2014 Section AD Final Exam Review: Rigid Body Dynamics Practice Problem 1. A rigid uniform flat disk of mass m, and radius R is moving in the plane towards a wall
ME 230: Kinematics and Dynamics Spring 2014 Section AD Final Exam Review: Rigid Body Dynamics Practice Problem 1. A rigid uniform flat disk of mass m, and radius R is moving in the plane towards a wall
Leonhard Euler ( September 1783)
") LEONHARD EULER (1707 - SEPTEMBER 1783) Leonhard Euler (1707 - September 1783) BEYOND EQUATIONS Leonhard Euler was born in Basle, Switzerland; he was in fact a born mathematician, who went on to become
LEONHARD EULER (1707 - SEPTEMBER 1783) Leonhard Euler (1707 - September 1783) BEYOND EQUATIONS Leonhard Euler was born in Basle, Switzerland; he was in fact a born mathematician, who went on to become
Physics 121, March 25, Rotational Motion and Angular Momentum. Department of Physics and Astronomy, University of Rochester
 Physics 121, March 25, 2008. Rotational Motion and Angular Momentum. Physics 121. March 25, 2008. Course Information Topics to be discussed today: Review of Rotational Motion Rolling Motion Angular Momentum
Physics 121, March 25, 2008. Rotational Motion and Angular Momentum. Physics 121. March 25, 2008. Course Information Topics to be discussed today: Review of Rotational Motion Rolling Motion Angular Momentum
Physics 106b/196b Problem Set 9 Due Jan 19, 2007
 Physics 06b/96b Problem Set 9 Due Jan 9, 2007 Version 3: January 8, 2007 This problem set focuses on dynamics in rotating coordinate systems (Section 5.2), with some additional early material on dynamics
Physics 06b/96b Problem Set 9 Due Jan 9, 2007 Version 3: January 8, 2007 This problem set focuses on dynamics in rotating coordinate systems (Section 5.2), with some additional early material on dynamics
Physics 351 Friday, April 24, 2015
 Physics 351 Friday, April 24, 2015 HW13 median report time = 5 hours. You ve solved 145 homework problems this term (not counting XC). Whew! This weekend, you ll read Feynman s two lectures (Feynman Lectures
Physics 351 Friday, April 24, 2015 HW13 median report time = 5 hours. You ve solved 145 homework problems this term (not counting XC). Whew! This weekend, you ll read Feynman s two lectures (Feynman Lectures
13. Rigid Body Dynamics II
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 13. Rigid Body Dynamics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 13. Rigid Body Dynamics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Dealing with Rotating Coordinate Systems Physics 321. (Eq.1)
") Dealing with Rotating Coordinate Systems Physics 321 The treatment of rotating coordinate frames can be very confusing because there are two different sets of aes, and one set of aes is not constant in
Dealing with Rotating Coordinate Systems Physics 321 The treatment of rotating coordinate frames can be very confusing because there are two different sets of aes, and one set of aes is not constant in
Phys 7221 Homework # 8
 Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Physics 339 Euler Angles & Free Precession November 2017 Hamilton s Revenge
 Physics 339 Euler Angles & Free Precession November 217 Hamilton s Revenge As described in the textbook, Euler Angles are a way to specify the configuration of a 3d object. Starting from a fixed configuration
Physics 339 Euler Angles & Free Precession November 217 Hamilton s Revenge As described in the textbook, Euler Angles are a way to specify the configuration of a 3d object. Starting from a fixed configuration
A set of N particles forms a rigid body if the distance between any 2 particles is fixed:
 Chapter Rigid Body Dynamics.1 Coordinates of a Rigid Body A set of N particles forms a rigid body if the distance between any particles is fixed: r ij r i r j = c ij = constant. (.1) Given these constraints,
Chapter Rigid Body Dynamics.1 Coordinates of a Rigid Body A set of N particles forms a rigid body if the distance between any particles is fixed: r ij r i r j = c ij = constant. (.1) Given these constraints,
Rotational motion of a rigid body spinning around a rotational axis ˆn;
 Physics 106a, Caltech 15 November, 2018 Lecture 14: Rotations The motion of solid bodies So far, we have been studying the motion of point particles, which are essentially just translational. Bodies with
Physics 106a, Caltech 15 November, 2018 Lecture 14: Rotations The motion of solid bodies So far, we have been studying the motion of point particles, which are essentially just translational. Bodies with
If the symmetry axes of a uniform symmetric body coincide with the coordinate axes, the products of inertia (Ixy etc.
 Prof. O. B. Wright, Autumn 007 Mechanics Lecture 9 More on rigid bodies, coupled vibrations Principal axes of the inertia tensor If the symmetry axes of a uniform symmetric body coincide with the coordinate
Prof. O. B. Wright, Autumn 007 Mechanics Lecture 9 More on rigid bodies, coupled vibrations Principal axes of the inertia tensor If the symmetry axes of a uniform symmetric body coincide with the coordinate
PHY 5246: Theoretical Dynamics, Fall Assignment # 10, Solutions. (1.a) N = a. we see that a m ar a = 0 and so N = 0. ω 3 ω 2 = 0 ω 2 + I 1 I 3
 N = a. we see that a m ar a = 0 and so N = 0. ω 3 ω 2 = 0 ω 2 + I 1 I 3") PHY 54: Theoretical Dynamics, Fall 015 Assignment # 10, Solutions 1 Graded Problems Problem 1 x 3 a ω First we calculate the moments of inertia: ( ) a I 1 = I = m 4 + b, 1 (1.a) I 3 = ma. b/ α The torque
PHY 54: Theoretical Dynamics, Fall 015 Assignment # 10, Solutions 1 Graded Problems Problem 1 x 3 a ω First we calculate the moments of inertia: ( ) a I 1 = I = m 4 + b, 1 (1.a) I 3 = ma. b/ α The torque
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class
 Spring 2014 Due 3/21/14 at start of class") Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
PHY 5246: Theoretical Dynamics, Fall Assignment # 9, Solutions. y CM (θ = 0) = 2 ρ m
 = 2 ρ m") PHY 546: Theoretical Dnamics, Fall 5 Assignment # 9, Solutions Graded Problems Problem (.a) l l/ l/ CM θ x In order to find the equation of motion of the triangle, we need to write the Lagrangian, with
PHY 546: Theoretical Dnamics, Fall 5 Assignment # 9, Solutions Graded Problems Problem (.a) l l/ l/ CM θ x In order to find the equation of motion of the triangle, we need to write the Lagrangian, with
Physics 351 Wednesday, February 14, 2018
 Physics 351 Wednesday, February 14, 2018 HW4 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. Respond at pollev.com/phys351 or text PHYS351 to 37607 once to join,
Physics 351 Wednesday, February 14, 2018 HW4 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. Respond at pollev.com/phys351 or text PHYS351 to 37607 once to join,
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Lecture 35: The Inertia Tensor
 Lecture 35: The Inertia Tensor We found last time that the kinetic energy of a rotating obect was: 1 Trot = ωω i Ii where i, ( I m δ x x x i i, k, i, k So the nine numbers represented by the I i tell us
Lecture 35: The Inertia Tensor We found last time that the kinetic energy of a rotating obect was: 1 Trot = ωω i Ii where i, ( I m δ x x x i i, k, i, k So the nine numbers represented by the I i tell us
Bindel, Fall 2011 Intro to Scientific Computing (CS 3220) Week 3: Wednesday, Jan 9
 Week 3: Wednesday, Jan 9") Problem du jour Week 3: Wednesday, Jan 9 1. As a function of matrix dimension, what is the asymptotic complexity of computing a determinant using the Laplace expansion (cofactor expansion) that you probably
Problem du jour Week 3: Wednesday, Jan 9 1. As a function of matrix dimension, what is the asymptotic complexity of computing a determinant using the Laplace expansion (cofactor expansion) that you probably
Physics 121, Midterm Exam #3 Tuesday April 20, am 9.30 am. Do not turn the pages of the exam until you are instructed to do so.
 Exam April, 8. am - 9. am, Midterm Exam # Tuesday April, 8. am 9. am Do not turn the pages of the exam until you are instructed to do so. You are responsible for reading the following rules carefully before
Exam April, 8. am - 9. am, Midterm Exam # Tuesday April, 8. am 9. am Do not turn the pages of the exam until you are instructed to do so. You are responsible for reading the following rules carefully before
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
 Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
SOLUTIONS, PROBLEM SET 11
 SOLUTIONS, PROBLEM SET 11 1 In this problem we investigate the Lagrangian formulation of dynamics in a rotating frame. Consider a frame of reference which we will consider to be inertial. Suppose that
SOLUTIONS, PROBLEM SET 11 1 In this problem we investigate the Lagrangian formulation of dynamics in a rotating frame. Consider a frame of reference which we will consider to be inertial. Suppose that
Contents. Objectives Torque on an Object Rotational Kinetic Energy Yo yo Rolling on an Incline Physical Pendulum Angular Momentum and Torque Recap
 Physics 121 for Majors Class 21 Rotating Objects Last Class We learned to find angular momentum and torques of point masses and objects. We learned how to use torques and forces to solve problems with
Physics 121 for Majors Class 21 Rotating Objects Last Class We learned to find angular momentum and torques of point masses and objects. We learned how to use torques and forces to solve problems with
Astronomy 6570 Physics of the Planets. Precession: Free and Forced
 Astronomy 6570 Physics of the Planets Precession: Free and Forced Planetary Precession We have seen above how information concerning the distribution of density within a planet (in particular, the polar
Astronomy 6570 Physics of the Planets Precession: Free and Forced Planetary Precession We have seen above how information concerning the distribution of density within a planet (in particular, the polar
Rotational Motion. Chapter 4. P. J. Grandinetti. Sep. 1, Chem P. J. Grandinetti (Chem. 4300) Rotational Motion Sep.
 Rotational Motion Sep.") Rotational Motion Chapter 4 P. J. Grandinetti Chem. 4300 Sep. 1, 2017 P. J. Grandinetti (Chem. 4300) Rotational Motion Sep. 1, 2017 1 / 76 Angular Momentum The angular momentum of a particle with respect
Rotational Motion Chapter 4 P. J. Grandinetti Chem. 4300 Sep. 1, 2017 P. J. Grandinetti (Chem. 4300) Rotational Motion Sep. 1, 2017 1 / 76 Angular Momentum The angular momentum of a particle with respect
Conservation of Linear Momentum : If a force F is acting on particle of mass m, then according to Newton s second law of motion, we have F = dp /dt =
 Conservation of Linear Momentum : If a force F is acting on particle of mass m, then according to Newton s second law of motion, we have F = dp /dt = d (mv) /dt where p =mv is linear momentum of particle
Conservation of Linear Momentum : If a force F is acting on particle of mass m, then according to Newton s second law of motion, we have F = dp /dt = d (mv) /dt where p =mv is linear momentum of particle
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Physics 218 Lecture 23
 Physics 218 Lecture 23 Dr. David Toback Physics 218, Lecture XXIII 1 Checklist for Today Things due Monday Chapter 14 in WebCT Things that were due yesterday Chapter 15 problems as Recitation Prep Things
Physics 218 Lecture 23 Dr. David Toback Physics 218, Lecture XXIII 1 Checklist for Today Things due Monday Chapter 14 in WebCT Things that were due yesterday Chapter 15 problems as Recitation Prep Things
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Lecture 32: Dynamics of Rigid Bodies
 Lecture 3: Dynamics of Rigid Bodies Our next topic is the study of a special ind of system of particles a rigid body The defining characteristic of such a system is that the distance between any two particles
Lecture 3: Dynamics of Rigid Bodies Our next topic is the study of a special ind of system of particles a rigid body The defining characteristic of such a system is that the distance between any two particles
Motion of a Spinning Symmetric Top
 Motion of a Spinning Symmetric Top V. Tanrıverdi tanriverdivedat@googlemail.com Abstract We firstly reviewed the symmetric top problem, then we have solved different possible motions numerically. We have
Motion of a Spinning Symmetric Top V. Tanrıverdi tanriverdivedat@googlemail.com Abstract We firstly reviewed the symmetric top problem, then we have solved different possible motions numerically. We have
Variation Principle in Mechanics
 Section 2 Variation Principle in Mechanics Hamilton s Principle: Every mechanical system is characterized by a Lagrangian, L(q i, q i, t) or L(q, q, t) in brief, and the motion of he system is such that
Section 2 Variation Principle in Mechanics Hamilton s Principle: Every mechanical system is characterized by a Lagrangian, L(q i, q i, t) or L(q, q, t) in brief, and the motion of he system is such that
Laws of gyroscopes / cardanic gyroscope
 Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Second quantization: where quantization and particles come from?
 110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
Gyroscopes and statics
 Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
16.07 Dynamics Final Exam
 Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Tutorial 4. Figure 1: Rod and spindle. Dog. Figure 2: I have no idea what I m doing. Dog
 Tutorial 4 Question 1 Figure 1: Rod and spindle A uniform disk rotates at 3.60 rev/s around a frictionless spindle. A non-rotating rod, of the same mass as the disk and equal in length to the disk s diameter,
Tutorial 4 Question 1 Figure 1: Rod and spindle A uniform disk rotates at 3.60 rev/s around a frictionless spindle. A non-rotating rod, of the same mass as the disk and equal in length to the disk s diameter,
Physics 8 Monday, October 12, 2015
 Physics 8 Monday, October 12, 2015 HW5 will be due Friday. (HW5 is just Ch9 and Ch10 problems.) You re reading Chapter 12 ( torque ) this week, even though in class we re just finishing Ch10 / starting
Physics 8 Monday, October 12, 2015 HW5 will be due Friday. (HW5 is just Ch9 and Ch10 problems.) You re reading Chapter 12 ( torque ) this week, even though in class we re just finishing Ch10 / starting
Physics 121. March 18, Physics 121. March 18, Course Announcements. Course Information. Topics to be discussed today:
 Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Analytical Mechanics ( AM )
") Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Physics 351 Monday, February 26, 2018
 Physics 351 Monday, February 26, 2018 You just read the first half ( 10.1 10.7) of Chapter 10, which we ll probably start to discuss this Friday. The midterm exam (March 26) will cover (only!) chapters
Physics 351 Monday, February 26, 2018 You just read the first half ( 10.1 10.7) of Chapter 10, which we ll probably start to discuss this Friday. The midterm exam (March 26) will cover (only!) chapters
Physics 8 Friday, October 25, 2013
 Physics 8 Friday, October 25, 2013 Hold on to your HW8 paper. Don t turn it in yet! What we covered in class this week went much more slowly than I had expected. We spent a lot of time discussing the ideas
Physics 8 Friday, October 25, 2013 Hold on to your HW8 paper. Don t turn it in yet! What we covered in class this week went much more slowly than I had expected. We spent a lot of time discussing the ideas
Phys 270 Final Exam. Figure 1: Question 1
 Phys 270 Final Exam Time limit: 120 minutes Each question worths 10 points. Constants: g = 9.8m/s 2, G = 6.67 10 11 Nm 2 kg 2. 1. (a) Figure 1 shows an object with moment of inertia I and mass m oscillating
Phys 270 Final Exam Time limit: 120 minutes Each question worths 10 points. Constants: g = 9.8m/s 2, G = 6.67 10 11 Nm 2 kg 2. 1. (a) Figure 1 shows an object with moment of inertia I and mass m oscillating
Center of Gravity. The location of the center of gravity is defined by: n mgx. APSC 111 Review Page 7
 Center of Gravity We have said that for rigid bodies, all of the forces act at the centre of mass. This is a normally a very good approximation, but strictly speaking, the forces act at the centre of gravity,
Center of Gravity We have said that for rigid bodies, all of the forces act at the centre of mass. This is a normally a very good approximation, but strictly speaking, the forces act at the centre of gravity,
Contents. Objectives Velocity Addition CM Velocity 2 D Collisions totally inelastic elastic Recap. Contents
 Physics 121 for Majors totally in Class 16 totally in Velocity Addition and Collisions In Two Dimensions Last Class More on Work Potential Energy Conservation of Energy Power totally in Today s Class Adding
Physics 121 for Majors totally in Class 16 totally in Velocity Addition and Collisions In Two Dimensions Last Class More on Work Potential Energy Conservation of Energy Power totally in Today s Class Adding
Practice Exam #3 A N B. 1.2 N C N D N E. 0 N
 Practice Exam #3 1. A barbell is mounted on a nearly frictionless axle through its center. The low-mass rod has a length d = 0.9 m, and each ball has a mass m = 0.5 kg. At this instant, there are two forces
Practice Exam #3 1. A barbell is mounted on a nearly frictionless axle through its center. The low-mass rod has a length d = 0.9 m, and each ball has a mass m = 0.5 kg. At this instant, there are two forces
EECS 117. Lecture 17: Magnetic Forces/Torque, Faraday s Law. Prof. Niknejad. University of California, Berkeley
 University of California, Berkeley EECS 117 Lecture 17 p. 1/? EECS 117 Lecture 17: Magnetic Forces/Torque, Faraday s Law Prof. Niknejad University of California, Berkeley University of California, Berkeley
University of California, Berkeley EECS 117 Lecture 17 p. 1/? EECS 117 Lecture 17: Magnetic Forces/Torque, Faraday s Law Prof. Niknejad University of California, Berkeley University of California, Berkeley
Spacecraft Dynamics and Control
 Spacecraft Dynamics and Control Matthew M. Peet Arizona State University Lecture 16: Euler s Equations Attitude Dynamics In this Lecture we will cover: The Problem of Attitude Stabilization Actuators Newton
Spacecraft Dynamics and Control Matthew M. Peet Arizona State University Lecture 16: Euler s Equations Attitude Dynamics In this Lecture we will cover: The Problem of Attitude Stabilization Actuators Newton
Physics 9 Wednesday, April 2, 2014
 Physics 9 Wednesday, April 2, 2014 FYI: final exam is Friday, May 9th, at 9am, in DRL A2. HW10 due Friday. No quiz today. (HW8 too difficult for a quiz!) After this week: 2 weeks on circuits; then optics
Physics 9 Wednesday, April 2, 2014 FYI: final exam is Friday, May 9th, at 9am, in DRL A2. HW10 due Friday. No quiz today. (HW8 too difficult for a quiz!) After this week: 2 weeks on circuits; then optics
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
Classical Mechanics. Luis Anchordoqui
 1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
2 Canonical quantization
 Phys540.nb 7 Canonical quantization.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system?.1.1.lagrangian Lagrangian mechanics is a reformulation of classical mechanics.
Phys540.nb 7 Canonical quantization.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system?.1.1.lagrangian Lagrangian mechanics is a reformulation of classical mechanics.
Physics 200 Lecture 4. Integration. Lecture 4. Physics 200 Laboratory
 Physics 2 Lecture 4 Integration Lecture 4 Physics 2 Laboratory Monday, February 21st, 211 Integration is the flip-side of differentiation in fact, it is often possible to write a differential equation
Physics 2 Lecture 4 Integration Lecture 4 Physics 2 Laboratory Monday, February 21st, 211 Integration is the flip-side of differentiation in fact, it is often possible to write a differential equation
Motion of a Spinning Symmetric Top
 Motion of a Spinning Symmetric Top V. Tanrıverdi tanriverdivedat@googlemail.com Abstract We firstly reviewed the symmetric top problem, then we have solved different possible motions numerically. We have
Motion of a Spinning Symmetric Top V. Tanrıverdi tanriverdivedat@googlemail.com Abstract We firstly reviewed the symmetric top problem, then we have solved different possible motions numerically. We have
Physics 121, April 3, Equilibrium and Simple Harmonic Motion. Physics 121. April 3, Physics 121. April 3, Course Information
 Physics 121, April 3, 2008. Equilibrium and Simple Harmonic Motion. Physics 121. April 3, 2008. Course Information Topics to be discussed today: Requirements for Equilibrium (a brief review) Stress and
Physics 121, April 3, 2008. Equilibrium and Simple Harmonic Motion. Physics 121. April 3, 2008. Course Information Topics to be discussed today: Requirements for Equilibrium (a brief review) Stress and
9 Kinetics of 3D rigid bodies - rotating frames
 9 Kinetics of 3D rigid bodies - rotating frames 9. Consider the two gears depicted in the figure. The gear B of radius R B is fixed to the ground, while the gear A of mass m A and radius R A turns freely
9 Kinetics of 3D rigid bodies - rotating frames 9. Consider the two gears depicted in the figure. The gear B of radius R B is fixed to the ground, while the gear A of mass m A and radius R A turns freely
ESM 3124 Intermediate Dynamics 2012, HW6 Solutions. (1 + f (x) 2 ) We can first write the constraint y = f(x) in the form of a constraint
 2 ) We can first write the constraint y = f(x) in the form of a constraint") ESM 314 Intermediate Dynamics 01, HW6 Solutions Roller coaster. A bead of mass m can slide without friction, under the action of gravity, on a smooth rigid wire which has the form y = f(x). (a) Find the
ESM 314 Intermediate Dynamics 01, HW6 Solutions Roller coaster. A bead of mass m can slide without friction, under the action of gravity, on a smooth rigid wire which has the form y = f(x). (a) Find the
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
Physics 8 Friday, November 4, 2011
 Physics 8 Friday, November 4, 2011 Please turn in Homework 7. I will hand out solutions once everyone is here. The handout also includes HW8 and a page or two of updates to the equation sheet needed to
Physics 8 Friday, November 4, 2011 Please turn in Homework 7. I will hand out solutions once everyone is here. The handout also includes HW8 and a page or two of updates to the equation sheet needed to
3 Space curvilinear motion, motion in non-inertial frames
 3 Space curvilinear motion, motion in non-inertial frames 3.1 In-class problem A rocket of initial mass m i is fired vertically up from earth and accelerates until its fuel is exhausted. The residual mass
3 Space curvilinear motion, motion in non-inertial frames 3.1 In-class problem A rocket of initial mass m i is fired vertically up from earth and accelerates until its fuel is exhausted. The residual mass
PHY131H1S - Class 20. Pre-class reading quiz on Chapter 12
 PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last