The Laplace Transform
|
|
|
- Leo Franklin
- 5 years ago
- Views:
Transcription
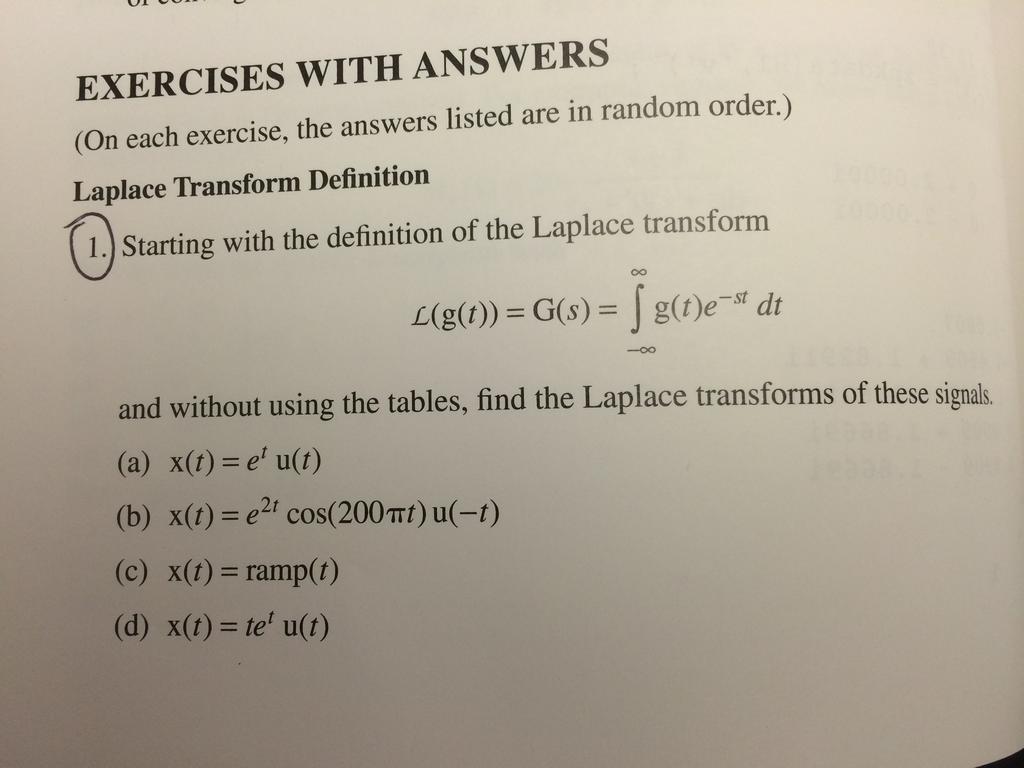
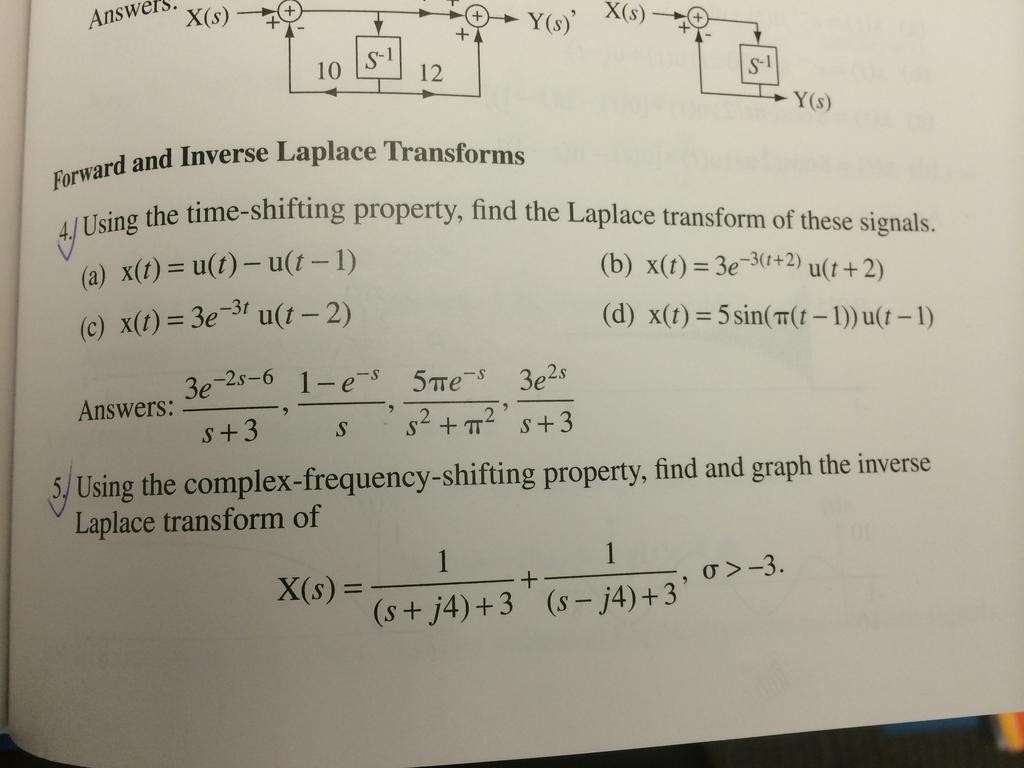
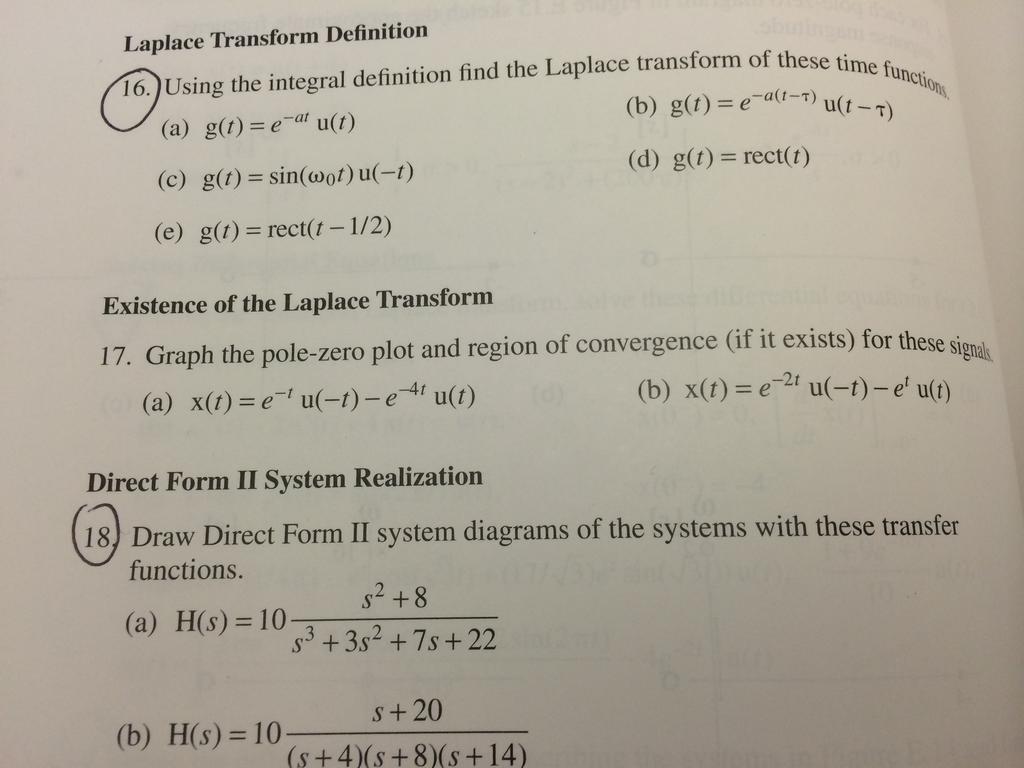
1 The Laplace Transform
2 Syllabus ECE 316, Spring 2015
3 Final Grades Homework (6 problems per week): 25% Exams (midterm and final): 50% (25:25) Random Quiz: 25%

4 Textbook M. Roberts, Signals and Systems, 2nd edition, McGraw- Hill, 2011 Chapter 8-16
5 Other information Course website: htm Office hour: 11am-12am MWF. TA: Ramin Nabati
6 Main Topics Basic Tools: Laplace Transform (continuous time system) Z Transform (discrete time system) Sampling (converting from continuous time system to discrete time system) Applications Filter Design Frequency Analysis State space
7 What You Can Do After This Course? Signal Aspect: Given a signal, you can analyze the spectrum and understand the characteristic (low pitch? high pitch?) You can sample the signal to obtain digitized signals. System Aspect: Given an input-output specification (say, filter out an interference in audio signal), you can design a simple filter (leave the detailed design to more advanced courses). Given a system, you can determine the stability and predict the output as a function of input frequency.

8 Foundation of Different Areas If you do not understand signals and systems, the following areas are forbidden: Communications Signal processing Audio/Image/Video processing Control Filter Design A-D Circuits et al
9 Keywords to be remembered after 10 years Laplace transform, poles, zeros, complex plane Z-transform, unit circle Sampling, Nyquist criterion, aliasing Low/high/band pass filter, Butterworth filter Frequency response, bandwidth Stability, system state Check this list when you complete the course.
10 Generalizing the Fourier Transform! The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the Laplace transform, the complex sinusoids become complex exponentials of the form e st where s can have any complex value. Replacing the complex sinusoids with complex exponentials leads to this definition of the Laplace transform. L( x( t) ) = X s ( ) L x t ( ) = x t X s ( )e st dt ( ) 1/13/11! M. J. Roberts - All Rights Reserved! 2!
11 Generalizing the Fourier Transform! The variable s is viewed as a generalization of the variable ω of the form s = σ + jω. Then, when σ, the real part of s, is zero, the Laplace transform reduces to the CTFT. Using s = σ + jω the Laplace transform is ( ) = x t X s ( )e ( σ + jω )t dt = F x( t)e σt which is the Fourier transform of x( t)e σt 1/13/11! M. J. Roberts - All Rights Reserved! 3!
12 Generalizing the Fourier Transform! The extra factor e σt is sometimes called a convergence factor because, when chosen properly, it makes the integral converge for some signals for which it would not otherwise converge. For example, strictly speaking, the signal Au t ( ) does not have a CTFT because the integral does not converge. But if it is multiplied by the convergence factor, and the real part of s is chosen appropriately, the CTFT integral will converge. Au( t)e jωt dt Ae σt u( t)e jωt dt 0 = A e jωt dt Does not converge = A e ( σ + jω )t dt Converges (if σ > 0) 0 1/13/11! M. J. Roberts - All Rights Reserved! 4!
13 Complex Exponential Excitation! If a continuous-time LTI system is excited by a complex exponential x t ( ) = Ae st, where A and s can each be any complex number, the system response is also a complex exponential of the same functional form except multiplied by a complex constant. The response is the convolution of the excitation with the impulse response and that is ( ) = h τ y t ( )x( t τ )dτ = h τ The quantity H s of h( t). ( ) = h τ ( ) Ae s t τ ( ) dτ = Ae st h( τ )e sτ dτ 1/13/11! M. J. Roberts - All Rights Reserved! 5! x( t) ( )e sτ dτ is called the Laplace transform
14 Complex Exponential Excitation! Let x t ( ) = ( 6 + j3) e 3 j 2 A ( s ) t = ( )e ( 3 j 2)t and let h( t) = e 4t u( t). Then H( s) = 1, σ > 4 and, s + 4 in this case, s = 3 j2 = σ + jω with σ = 3 > 4 and ω = 2. y( t) = x( t)h( s) = 6 + j3 3 j2 + 4 e ( 3 j 2)t = ( )e ( 3 j 2)t. The response is the same functional form as the excitation but multiplied by a different complex constant. This only happens when the excitation is a complex exponential and that is what makes complex exponentials unique. 1/13/11! M. J. Roberts - All Rights Reserved! 6!

15 Pierre-Simon Laplace! 3/23/1749-3/2/1827! 1/13/11! M. J. Roberts - All Rights Reserved! 7!
16 The Transfer Function! Let x( t) be the excitation and let y( t) be the response of a system with impulse response h( t). The Laplace transform of y( t) is Y s ( ) = y t Y s ( )e st dt = h( t) x t ( ) = h τ Y s ( ) = h τ ( ) ( )x( t τ )dτ e st dt ( )dτ x( t τ )e st dt e st dt 1/13/11! M. J. Roberts - All Rights Reserved! 8!
17 The Transfer Function! Y s ( ) = h τ ( )dτ Let λ = t τ dλ = dt. Then Y s ( ) = h τ x( t τ )e st dt ( )dτ x( s( λ+τ ) λ)e dλ = h( τ )e sτ dτ x( λ)e sλ dλ H( s) X( s) Y( s) = H( s)x( s) H( s) is called the transfer function. y( t) = x( t) h( t) L Y( s) = H( s)x( s) 1/13/11! M. J. Roberts - All Rights Reserved! 9!
18 The Transfer Function! Let x( t) = u( t) and let h( t) = e 4t u( t). Find y( t). y( t) = x( t) h( t) = x τ y( t) = y t ( )h( t τ )dτ = u τ ( 4 t τ )e ( ) u ( t τ )dτ t t 4( t τ ) e 4t 1 1 e dτ = e 4t e 4τ dτ = e 4t e 4t =, t > , t < 0 ( )( 1 e 4t )u( t) ( ) = 1/ 4 X( s) = 1/ s, H( s) = 1 s + 4 Y ( s ) = 1 s 1 s + 4 = 1/ 4 s x( t) = ( 1/ 4) 1 e 4t ( ) ( )u t 1/ 4 s + 4 1/13/11! M. J. Roberts - All Rights Reserved! 10!
19 Cascade-Connected Systems! If two systems are cascade connected the transfer function of the overall system is the product of the transfer functions of the two individual systems. 1/13/11! M. J. Roberts - All Rights Reserved! 11!
20 Direct Form II Realization! A very common form of transfer function is a ratio of two polynomials in s, ( ) = Y( s) X( s) = N b k s k=0 H s N k=0 k a k s k = b N s N + b N 1 s N b 1 s + b 0 a N s N + a N 1 s N a 1 s + a 0 1/13/11! M. J. Roberts - All Rights Reserved! 12!
21 The transfer function can be conceived as the product of two transfer functions, and Direct Form II Realization! H 1 H 2 ( s) = Y s 1 X s ( s) = Y s s Y 1 ( ) ( ) = 1 a N s N + a N 1 s N a 1 s + a 0 ( ) ( ) = b s N N + b N 1 s N b 1 s + b 0 1/13/11! M. J. Roberts - All Rights Reserved! 13!
22 From we get or X s H 1 ( s) = Y s 1 X s ( ) ( ) = 1 a N s N + a N 1 s N a 1 s + a 0 X( s) = a N s N + a N 1 s N a 1 s + a 0 Y 1 ( s) ( ) = a N s N Y 1 ( s) + a N 1 s N 1 Y 1 ( s) + + a 1 s Y 1 ( s) + a 0 Y 1 ( s) Rearranging s N Y 1 Direct Form II Realization! ( s) = 1 a N { X( s) a N 1 s N 1 Y 1 ( s) + + a 1 s Y 1 ( s) + a 0 Y 1 ( s) } 1/13/11! M. J. Roberts - All Rights Reserved! 14!
23 Direct Form II Realization! 1/13/11! M. J. Roberts - All Rights Reserved! 15!
24 Direct Form II Realization! 1/13/11! M. J. Roberts - All Rights Reserved! 16!
25 Direct Form II Realization! A system is defined by y H( s) = ( t) + 3 y t s 5 s 2 + 3s + 7 ( ) + 7y( t) = x ( t) 5x t ( ). 1/13/11! M. J. Roberts - All Rights Reserved! 17!
26 Inverse Laplace Transform! There is an inversion integral y( t) = 1 j2π σ + j Y( s)e st ds, s = σ + jω σ j for finding y( t) from Y( s), but it is rarely used in practice. Usually inverse Laplace transforms are found by using tables of standard functions and the properties of the Laplace transform. 1/13/11! M. J. Roberts - All Rights Reserved! 18!
27 If x t Existence of the Laplace Transform! Time Limited Signals! ( ) = 0 for t < t 0 and t > t 1 it is a time limited signal. If ( ) is also bounded for all t, the Laplace transform integral x t converges and the Laplace transform exists for all s. 1/13/11! M. J. Roberts - All Rights Reserved! 19!
28 Existence of the Laplace Transform! Let x( t) = rect ( t) = u( t +1/ 2) u( t 1/ 2). X s ( ) = rect t ( )e st dt = e st dt = e s/2 e s/2 s 1/2 1/2 = es/2 e s/2 s, All s 1/13/11! M. J. Roberts - All Rights Reserved! 20!
29 Existence of the Laplace Transform! Right- and Left-Sided Signals! Right-Sided! Left-Sided! 1/13/11! M. J. Roberts - All Rights Reserved! 21!
30 Existence of the Laplace Transform! Right- and Left-Sided Exponentials! ( ) = e αt u t t 0 x t Right-Sided! ( ), α x t Left-Sided! ( ) = eβt u t 0 t ( ), β 1/13/11! M. J. Roberts - All Rights Reserved! 22!
31 Existence of the Laplace Right-Sided Exponential! x( t) = e αt u( t t 0 ), α ( ) = e αt e st dt X s If Re s t 0 Transform! = e ( α σ )t e jωt dt ( ) = σ > α the asymptotic behavior of e ( α σ )t e jωt as t is to approach zero and the Laplace transform integral converges. t 0 1/13/11! M. J. Roberts - All Rights Reserved! 23!
32 Existence of the Laplace Left-Sided Exponential! x( t) = e βt u t 0 t ( ) = e βt e st dt X s ( ), β Transform! t 0 = e ( β σ )t e jωt dt t 0 If σ < β the asymptotic behavior of e ( β σ )t e jωt as t is to approach zero and the Laplace transform integral converges. 1/13/11! M. J. Roberts - All Rights Reserved! 24!
33 Existence of the Laplace Transform! The two conditions σ > α and σ < β define the region of convergence (ROC) for the Laplace transform of right- and left-sided signals. 1/13/11! M. J. Roberts - All Rights Reserved! 25!
34 Existence of the Laplace Transform! Any right-sided signal that grows no faster than an exponential in positive time and any left-sided signal that grows no faster than an exponential in negative time has a Laplace transform. ( ) = x r ( t) + x l ( t) where x r ( t) is the right-sided part and ( t) is the left-sided part and if x r ( t) < K r e αt and x l ( t) < K l e βt If x t x l and α and β are as small as possible, then the Laplace-transform integral converges and the Laplace transform exists for α < σ < β. Therefore if α < β the ROC is the region α < β. If α > β, there is no ROC and the Laplace transform does not exist. 1/13/11! M. J. Roberts - All Rights Reserved! 26!
35 Laplace Transform Pairs! The Laplace transform of g 1 G 1 ( s) = Ae αt u( t)e st dt ( t) = Ae αt u( t) is 0 = A e ( s α )t dt = A e ( α σ )t e jωt dt = A s α This function has a pole at s = α and the ROC is the region to the right of that point. The Laplace transform of g 2 ( t) = Ae βt u t G 2 0 ( ) is ( s) = Ae βt u( t)e st dt = A e ( β s)t dt = A e ( β σ )t e jωt dt = A s β 0 This function has a pole at s = β and the ROC is the region to the left of that point. 0 1/13/11! M. J. Roberts - All Rights Reserved! 27!
36 Region of Convergence! The following two Laplace transform pairs illustrate the importance of the region of convergence. e αt u t ( ) L 1 s + α, σ > α e αt L u( t) 1 s + α, σ < α The two time-domain functions are different but the algebraic expressions for their Laplace transforms are the same. Only the ROC s are different. 1/13/11! M. J. Roberts - All Rights Reserved! 28!
37 Region of Convergence! Some of the most common Laplace transform pairs! (There is more extensive table in the book.)! ramp t u( t) L ( ) = t u( t) L e αt u( t) L L δ ( t) 1, All σ u( t) L ( ) = t u( t) L ( ), σ > α e αt u( t) L 1/ s, σ > 0 1/ s 2, σ > 0 ramp t 1/ s + α 1/ s, σ < 0 1/ s 2, σ < 0 1/ s + α ( ), σ < α e αt sin( ω 0 t)u t e αt cos( ω 0 t)u t ( ) L ( ) L ω 0 ( s + α ) ω 0 s + α ( s + α ) ω 0, σ > α e αt sin( ω 0 t)u t, σ > α e αt cos( ω 0 t)u t ( ) L ( ) L ω 0 ( s + α ) ω 0 s + α ( s + α ) ω 0, σ < α, σ < α
38
39
40
 = e t u( t) + e 2t u( t) x t e t u t e 2t u t ( ) L 1 s +1, σ > 1 ( ) L 1 s 2, σ < 2 e")
41 Laplace Transform Example! Find the Laplace transform of ( ) = e t u( t) + e 2t u( t) x t e t u t e 2t u t ( ) L 1 s +1, σ > 1 ( ) L 1 s 2, σ < 2 e t u( t) + e 2t L u( t) 1 s +1 1 s 2, 1 < σ < 2 1/13/11! M. J. Roberts - All Rights Reserved! 30!
42 Laplace Transform Example! Find the inverse Laplace transform of The ROC tells us that right-sided signal and that a left-sided signal. X( s) = 4 s s 6, 3 < σ < 6 x t 4 must inverse transform into a s must inverse transform into s 6 ( ) = 4e 3t u( t) +10e 6t u( t) 1/13/11! M. J. Roberts - All Rights Reserved! 31!
43 Laplace Transform Example! Find the inverse Laplace transform of X( s) = 4 s s 6, σ > 6 The ROC tells us that both terms must inverse transform into a right-sided signal. ( ) = 4e 3t u( t) 10e 6t u( t) x t 1/13/11! M. J. Roberts - All Rights Reserved! 32!
44 Laplace Transform Example! Find the inverse Laplace transform of X( s) = 4 s s 6, σ < 3 The ROC tells us that both terms must inverse transform into a left-sided signal. ( ) = 4e 3t u( t) +10e 6t u( t) x t 1/13/11! M. J. Roberts - All Rights Reserved! 33!
45 MATLAB System Objects! A MATLAB system object is a special kind of variable in MATLAB that contains all the information about a system. It can be created with the tf command whose syntax is sys = tf(num,den) where num is a vector of numerator coefficients of powers of s, den is a vector of denominator coefficients of powers of s, both in descending order and sys is the system object. 1/13/11! M. J. Roberts - All Rights Reserved! 34!
46 MATLAB System Objects! For example, the transfer function H 1 ( s) = can be created by the commands s s 5 + 4s 4 + 7s 3 +15s s + 75»num = [1 0 4] ; den = [ ] ;»H1 = tf(num,den) ;»H1 Transfer function: s ^ s ^ s ^ s ^ s ^ s /13/11! M. J. Roberts - All Rights Reserved! 35!
47 Partial-Fraction Expansion! The inverse Laplace transform can always be found (in principle at least) by using the inversion integral. But that is rare in engineering practice. The most common type of Laplace-transform expression is a ratio of polynomials in s, G( s) = b s M M + b M 1 s M b 1 s + b 0 s N + a N 1 s N 1 + a 1 s + a 0 The denominator can be factored, putting it into the form, G s ( ) = b M s M + b M 1 s M b 1 s + b 0 ( s p 1 )( s p 2 ) s p N ( ) 1/13/11! M. J. Roberts - All Rights Reserved! 36!
48 Partial-Fraction Expansion! For now, assume that there are no repeated poles and that N > M, making the fraction proper in s. Then it is possible to write the expression in the partial fraction form, where G( s) = K 1 + K s p 1 s p 2 K N s p N b M s M + b M 1 s M 1 + b 1 s + b 0 = K 1 + K ( s p 1 )( s p 2 ) ( s p N ) s p 1 s p 2 The K s can be found be any convenient method. K N s p N 1/13/11! M. J. Roberts - All Rights Reserved! 37!
49 Partial-Fraction Expansion! Multiply both sides by s p 1 ( s p 1 ) b s M M + b M 1 s M b 1 s + b 0 ( s p 1 )( s p 2 ) ( s p N ) = K 1 + ( s p 1 ) + ( s p 1 ) K 2 + s p 2 K N s p N K 1 = b p M M M 1 + b M p b 1 p 1 + b 0 ( p 1 p 2 ) ( p 1 p N ) All the K s can be found by the same method and the inverse Laplace transform is then found by table look-up. 1/13/11! M. J. Roberts - All Rights Reserved! 38!
50 H( s) = Partial-Fraction Expansion! 10s s + 4 K 1 = s + 4 ( )( s + 9) = K 1 ( ) K 2 = s + 9 ( ) H( s) = 8 s s s ( s + 4) s + 9 s K 2 s + 9, σ > 4 ( ) 10s ( s + 4) s + 9 ( ) h( t) = ( 8e 4t +18e 9t )u( t) = s= 4 = s= 9 10s s s s + 4 8s s + 72 = s + 4 ( )( s + 9) = 40 s= 4 5 = 8 = 90 s= 9 5 = 18 = 10s s + 4 ( )( s + 9). Check. 1/13/11! M. J. Roberts - All Rights Reserved! 39!
51 Partial-Fraction Expansion! If the expression has a repeated pole of the form, ( ) = b M s M + b M 1 s M b 1 s + b 0 G s ( s p 1 ) 2 ( s p 3 ) ( s p N ) the partial fraction expansion is of the form, G( s) = K 12 K N ( s p 1 ) + K 11 + K s p 1 s p 3 s p N and K 12 can be found using the same method as before. But K 11 cannot be found using the same method. 1/13/11! M. J. Roberts - All Rights Reserved! 40!
52 Partial-Fraction Expansion! Instead K 11 can be found by using the more general formula K qk = 1 ( m k)! d m k ds m k ( ) ( s p ) m q H s s pq, k = 1,2,, m where m is the order of the qth pole, which applies to repeated poles of any order. If the expression is not a proper fraction in s the partialfraction method will not work. But it is always possible to synthetically divide the numerator by the denominator until the remainder is a proper fraction and then apply partial-fraction expansion. 1/13/11! M. J. Roberts - All Rights Reserved! 41!
53 Partial-Fraction Expansion! H( s) = 10s ( s + 4) 2 s + 9 Repeated Pole K 12 = s + 4 Using K qk = K 11 = ( ) = K 12 ( s + 4) + K 11 2 ( ) 2 10s ( s + 4) 2 ( s + 9) 1 d m k ( m k)! ds m k 1 ( 2 1)! d 2 1 s + 4 ds 2 1 s= 4 ( ) ( s p ) m q H s ( ) 2 H( s) s K 2 s + 9, σ > 4 = 40 5 = 8 s pq = d s 4 ds, k = 1,2,, m 10s s + 9 s 4 1/13/11! M. J. Roberts - All Rights Reserved! 42!

54 Partial-Fraction Expansion! 1/13/11! M. J. Roberts - All Rights Reserved! 43!
55 H( s) = H( s) = Partial-Fraction Expansion! 10s 2 s + 4 ( )( s + 9) 10s 2 s 2 +13s + 36, σ > 4, σ > 4 Improper in s Synthetic Division s 2 +13s s 2 H( s) = s s + 4 ( )( s + 9) h( t) = 10δ ( t) 162e 9t 32e 4t 10 10s s = 10 s s + 9 ( ) u t 130s 360, σ > 4 1/13/11! M. J. Roberts - All Rights Reserved! 44!
56 Inverse Laplace Transform Example! G( s) = G( s) = G( s) = 3 / 2 g t Method 1 s ( s 3) s 2 4s + 5 s ( s 3) s 2 + j ( ) ( )( s 2 j) ( ) / 4 ( ) / 4 s j s 2 + j ( ) = 3 2 e3t j 3 j s 2 j, σ < 2 4 e ( 2 j )t + 3 j 4 e 2+ j ( )t, σ < 2, σ < 2 u( t) 1/13/11! M. J. Roberts - All Rights Reserved! 45!
57 Inverse Laplace Transform Example! ( ) = 3 2 e3t j g t 4 e ( 2 j )t + 3 j 4 e 2+ j ( )t u( t) This looks like a function of time that is complex-valued. But, with the use of some trigonometric identities it can be put into the form ( ) = ( 3 / 2) e 2t cos( t) + 1/ 3 g t which has only real values. { ( )sin( t) e3t }u t ( ) 1/13/11! M. J. Roberts - All Rights Reserved! 46!
58 Inverse Laplace Transform Example! G( s) = G( s) = G( s) = 3 / 2 Method 2 s ( s 3) s 2 4s + 5 s ( s 3) s 2 + j ( ) ( )( s 2 j) ( ) / 4 ( ) / 4 s j s 2 + j 3 j s 2 j, σ < 2, σ < 2, σ < 2 Getting a common denominator and simplifying G( s) = 3 / 2 s s 10 s 2 4s + 5 = 3 / 2 s s 5 / 3 ( s 2) 2 + 1, σ < 2 1/13/11! M. J. Roberts - All Rights Reserved! 47!
59 Inverse Laplace Transform Example! Method 2 G( s) = 3 / 2 s s 5 / 3 ( s 2) 2 +1, σ < 2 The denominator of the second term has the form of the Laplace transform of a damped cosine or damped sine but the numerator is not yet in the correct form. But by adding and subtracting the correct expression from that term and factoring we can put it into the form G( s) = 3 / 2 s s 2 ( s 2) / 3 s 2 ( ) 2 +1, σ < 2 1/13/11! M. J. Roberts - All Rights Reserved! 48!
60 Inverse Laplace Transform Example! Method 2 G( s) = 3 / 2 s 3 3 s 2 2 ( s 2) / 3 ( s 2) 2, σ < 2 +1 This can now be directly inverse Laplace transformed into g( t) = ( 3 / 2) { e 2t cos( t) + ( 1/ 3)sin( t) e3t }u( t) which is the same as the previous result. 1/13/11! M. J. Roberts - All Rights Reserved! 49!
61 Inverse Laplace Transform Example! Method 3 When we have a pair of poles p 2 and p 3 that are complex conjugates we can convert the form G( s) = A s 3 + K 2 + K 3 s p 2 s p 3 ( ) K 3 p 2 K 2 p 3 into the form G( s) = A s 3 + s K 2 + K 3 = A s 2 ( p 1 + p 2 )s + p 1 p 2 s 3 + Bs + C s 2 ( p 1 + p 2 )s + p 1 p 2 In this example we can find the constants A, B and C by realizing that G( s) = s ( s 3) ( s 2 4s + 5) A s 3 + Bs + C s 2 4s + 5, σ < 2 is not just an equation, it is an identity. That means it must be an equality for any value of s. 1/13/11! M. J. Roberts - All Rights Reserved! 50!
62 Inverse Laplace Transform Example! Method 3 A can be found as before to be 3 / 2. Letting s = 0, the identity becomes 0 3 / C and C = 5 / 2. Then, letting 5 s = 1, and solving we get B = 3 / 2. Now G( s) = 3 / 2 s 3 + ( 3 / 2)s + 5 / 2, σ < 2 s 2 4s + 5 or G( s) = 3 / 2 s 3 3 s 5 / 3 2 s 2 4s + 5, σ < 2 This is the same as a result in Method 2 and the rest of the solution is also the same. The advantage of this method is that all the numbers are real. 1/13/11! M. J. Roberts - All Rights Reserved! 51!
63 Use of MATLAB in Partial Fraction Expansion! MATLAB has a function residue that can be very helpful in partial fraction expansion. Its syntax is [r,p,k] = residue(b,a) where b is a vector of coefficients of descending powers of s in the numerator of the expression and a is a vector of coefficients of descending powers of s in the denominator of the expression, r is a vector of residues, p is a vector of finite pole locations and k is a vector of so-called direct terms which result when the degree of the numerator is equal to or greater than the degree of the denominator. For our purposes, residues are simply the numerators in the partial-fraction expansion. 1/13/11! M. J. Roberts - All Rights Reserved! 52!
64 Let g t and h t Laplace Transform Properties! L ( ) and h( t) form the transform pairs, g( t) G( s) L ( ) H( s) with ROC's, ROC G and ROC H respectively. Linearity L α g( t) + β h( t) α G s ( ) + β H( s) ROC ROC G ROC H L Time Shifting g( t t 0 ) G( s)e st 0 s-domain Shift ROC = ROC G ( ) L ( ) e s0t g t G s s 0 ROC = ROC G shifted by s 0, (s is in ROC if s s 0 is in ROC G ) 1/13/11! M. J. Roberts - All Rights Reserved! 53!
65 Laplace Transform Properties! Time Scaling Time Differentiation s-domain Differentiation ( ) L g at ( ) ( 1/ a )G s / a ROC = ROC G scaled by a (s is in ROC if s / a is in ROC G ) d dt g( t) L ROC ROC G t g t ( ) L sg( s) d ds G( s) ROC = ROC G 1/13/11! M. J. Roberts - All Rights Reserved! 54!
66 Laplace Transform Properties! Convolution in Time Time Integration g( t) h t ( ) L G( s)h( s) ROC ROC G ROC H t L g( τ )dτ G( s) / s ( ) ROC ROC G σ > 0 If g( t) = 0, t < 0 and there are no impulses or higher-order singularities at t = 0 then Initial Value Theorem: g( 0 + ) = lim sg s s Final Value Theorem: lim g t t ( ) = lim ( ) s 0 sg s ( ) if lim t g t ( ) exists 1/13/11! M. J. Roberts - All Rights Reserved! 55!
67 Laplace Transform Properties! Final Value Theorem ( ) = lim limg t sg s t s 0 This theorem only applies if the limit lim g t t It is possible for the limit lim sg s s 0 limit lim g t t ( ) does not exist. For example x( t) = cos ω 0 t ( ) L ( ) ( ) actually exists. ( ) to exist even though the X( s) = s lim s X s s 0 ( ) 2 = lim s 0 s 2 + ω = but lim cos ω 0 t t ( ) does not exist. s s 2 + ω 0 2 1/13/11! M. J. Roberts - All Rights Reserved! 56!
68 Laplace Transform Properties! Final Value Theorem! ( ) if all the ( ) lie in the open left half of the s plane. Be sure ( ) must ( ) could have a single The final value theorem applies to a function G s poles of sg s to notice that this does not say that all the poles of G s lie in the open left half of the s plane. G s pole at s = 0 and the final value theorem would still apply. 1/13/11! M. J. Roberts - All Rights Reserved! 57!
69 Use of Laplace Transform Properties! ( ) = u( t) u( t a) and L ( ) L ( ) L ( ) Find the Laplace transforms of x t x( 2t) = u( 2t) u( 2t a). From the table u t Then, using the time-shifting property u t a Using the linearity property u( t) u t a Using the time-scaling property L u( 2t) u( 2t a) e as s s s/2 = 1 / s, σ > 0. e as / s, σ > 0. ( 1 e as ) / s, σ > 0. 1 e as/2 s, σ > 0 1/13/11! M. J. Roberts - All Rights Reserved! 58!
70
71 Use of Laplace Transform Properties! Use the s-domain differentiation property and ( ) L u t 1 / s, σ > 0 to find the inverse Laplace transform of 1 / s 2. The s-domain differentiation property is t g t ( ) L d ( ds G( s) ). Then t u t ( ) L d ds 1 s = 1. Then using the linearity property 2 s t u t ( ) L 1 s. 2 1/13/11! M. J. Roberts - All Rights Reserved! 59!
72 The Unilateral Laplace Transform! In most practical signal and system analysis using the Laplace transform a modified form of the transform, called the unilateral Laplace transform, is used. The unilateral Laplace transform is defined by G s ( ) = g t 0 ( )e st dt. The only difference between this version and the previous definition is the change of the lower integration limit from to 0. With this definition, all the Laplace transforms of causal functions are the same as before with the same ROC, the region of the s plane to the right of all the finite poles. 1/13/11! M. J. Roberts - All Rights Reserved! 60!
73 The Unilateral Laplace Transform! The unilateral Laplace transform integral excludes negative time. If a function has non-zero behavior in negative time its unilateral and bilateral transforms will be different. Also functions with the same positive time behavior but different negative time behavior will have the same unilateral Laplace transform. Therefore, to avoid ambiguity and confusion, the unilateral Laplace transform should only be used in analysis of causal signals and systems. This is a limitation but in most practical analysis this limitation is not significant and the unilateral Laplace transform actually has advantages. 1/13/11! M. J. Roberts - All Rights Reserved! 61!
74 The Unilateral Laplace Transform! The main advantage of the unilateral Laplace transform is that the ROC is simpler than for the bilateral Laplace transform and, in most practical analysis, involved consideration of the ROC is unnecessary. The inverse Laplace transform is unchanged. It is g( t) = 1 j2π σ + j σ j G( s)e + st ds 1/13/11! M. J. Roberts - All Rights Reserved! 62!
75 The Unilateral Laplace Transform! Some of the properties of the unilateral Laplace transform are different from the bilateral Laplace transform. Time-Shifting L g( t t 0 ) G( s)e 0, t 0 > 0 Time Scaling L g( at) ( 1 / a )G s / a First Time Derivative Nth Time Derivative Time Integration d N dt N t 0 d dt g t ( ) L ( g( t) L ) sg( s) g( 0 ) s N G s L g( τ )dτ G( s) / s ( ), a > 0 N d ( ) n 1 s N n n=1 dt n 1 ( g( t) ) t =0 1/13/11! M. J. Roberts - All Rights Reserved! 63!
76 The Unilateral Laplace Transform! The time shifting property applies only for shifts to the right because a shift to the left could cause a signal to become non-causal. For the same reason scaling in time must only be done with positive scaling coefficients so that time is not reversed producing an anti-causal function. The derivative property must now take into account the initial value of the function at time t = 0 and the integral property applies only to functional behavior after time t = 0. Since the unilateral and bilateral Laplace transforms are the same for causal functions, the bilateral table of transform pairs can be used for causal functions. 1/13/11! M. J. Roberts - All Rights Reserved! 64!
77 The Unilateral Laplace Transform! The Laplace transform was developed for the solution of differential equations and the unilateral form is especially well suited for solving differential equations with initial conditions. For example, d 2 dt 2 ( ) x t + 7 d dt with initial conditions x 0 ( ) x t ( ) = 2 and d dt + 12 x( t) = 0 ( x( t) ) t =0 = 4. Laplace transforming both sides of the equation, using the new derivative property for unilateral Laplace transforms, s 2 X( s) s x( 0 ) d dt ( ) ( x( t) ) t =0 + 7 s X( s) x X s ( ) = 0 1/13/11! M. J. Roberts - All Rights Reserved! 65!
78 The Unilateral Laplace Transform! Solving for X( s) or X( s) = x t =2 =2 = 4 s x( 0 ) + 7x( 0 ) + d ( x( t) ) dt t =0 s 2 + 7s s + 10 s 2 + 7s + 12 = 4 s The inverse transform yields s + 4 ( ). This solution solves the differential equation X( s) = ( )u t ( ) = 4e 3t 2e 4t with the given initial conditions. 1/13/11! M. J. Roberts - All Rights Reserved! 66!
79 Pole-Zero Diagrams and Frequency Response! If the transfer function of a stable system is H(s), the frequency response is H(jω). The most common type of transfer function is of the form, H s Therefore H(jω) is H jω ( ) = A s z 1 ( ) s z 2 ( s p 1 ) s p 2 ( ) = A jω z 1 ( ) s z M ( ) s p N ( ) jω z 2 ( jω p 1 ) jω p 2 ( ) ( ) ( ) jω z M ( ) jω p N ( ) ( ) 1/13/11! M. J. Roberts - All Rights Reserved! 67!
80 Let H( s) = 3s s + 3. H( jω ) = 3 jω jω + 3 The numerator jω and the denominator jω + 3 can be conceived as vectors in the s plane. H( jω ) = 3 Pole-Zero Diagrams and Frequency Response! jω jω + 3 H jω ( ) = 3 =0 + jω ( jω + 3 ) 1/13/11! M. J. Roberts - All Rights Reserved! 68!
81 Pole-Zero Diagrams and Frequency Response! lim ω 0 H( jω ) = lim 3 ω 0 jω jω + 3 = 0 lim ω 0 + H( jω ) = lim 3 ω 0 + jω jω + 3 = 0 lim H( jω ) = lim 3 ω ω jω jω + 3 = 3 lim H( jω ) = lim 3 ω + ω + jω jω + 3 = 3 1/13/11! M. J. Roberts - All Rights Reserved! 69!
82 Pole-Zero Diagrams and Frequency Response! lim H ( jω ) = π ω = π 2 lim H ( jω ) = π + ω = π 2 lim H jω ω ( ) = π 2 π 2 = 0 lim H jω ω + ( ) = π 2 π 2 = 0 1/13/11! M. J. Roberts - All Rights Reserved! 70!
83 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 71!
84 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 72!
85 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 73!
86 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 74!
87 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 75!
88 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 76!
89 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 77!
90 Pole-Zero Diagrams and Frequency Response! 1/13/11! M. J. Roberts - All Rights Reserved! 78!
91 Homework 3. Due date: 09/16/2016
92
The Laplace Transform
 The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
The Laplace Transform
 The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
Generalizing the DTFT!
 The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 2 Laplace Transform I 1/52
 1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
Definition of the Laplace transform. 0 x(t)e st dt
e st dt") Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
ECE 3620: Laplace Transforms: Chapter 3:
 ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
Laplace Transforms and use in Automatic Control
 Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transform Part 1: Introduction (I&N Chap 13)
") Laplace Transform Part 1: Introduction (I&N Chap 13) Definition of the L.T. L.T. of Singularity Functions L.T. Pairs Properties of the L.T. Inverse L.T. Convolution IVT(initial value theorem) & FVT (final
Laplace Transform Part 1: Introduction (I&N Chap 13) Definition of the L.T. L.T. of Singularity Functions L.T. Pairs Properties of the L.T. Inverse L.T. Convolution IVT(initial value theorem) & FVT (final
Laplace Transform Analysis of Signals and Systems
 Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Dynamic Response. Assoc. Prof. Enver Tatlicioglu. Department of Electrical & Electronics Engineering Izmir Institute of Technology.
 Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
ELG 3150 Introduction to Control Systems. TA: Fouad Khalil, P.Eng., Ph.D. Student
 ELG 350 Introduction to Control Systems TA: Fouad Khalil, P.Eng., Ph.D. Student fkhalil@site.uottawa.ca My agenda for this tutorial session I will introduce the Laplace Transforms as a useful tool for
ELG 350 Introduction to Control Systems TA: Fouad Khalil, P.Eng., Ph.D. Student fkhalil@site.uottawa.ca My agenda for this tutorial session I will introduce the Laplace Transforms as a useful tool for
CHAPTER 5: LAPLACE TRANSFORMS
 CHAPTER 5: LAPLACE TRANSFORMS SAMANTHA RAMIREZ PREVIEW QUESTIONS What are some commonly recurring functions in dynamic systems and their Laplace transforms? How can Laplace transforms be used to solve
CHAPTER 5: LAPLACE TRANSFORMS SAMANTHA RAMIREZ PREVIEW QUESTIONS What are some commonly recurring functions in dynamic systems and their Laplace transforms? How can Laplace transforms be used to solve
Review of Linear Time-Invariant Network Analysis
 D1 APPENDIX D Review of Linear Time-Invariant Network Analysis Consider a network with input x(t) and output y(t) as shown in Figure D-1. If an input x 1 (t) produces an output y 1 (t), and an input x
D1 APPENDIX D Review of Linear Time-Invariant Network Analysis Consider a network with input x(t) and output y(t) as shown in Figure D-1. If an input x 1 (t) produces an output y 1 (t), and an input x
LTI Systems (Continuous & Discrete) - Basics
 - Basics") LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
Chap. 3 Laplace Transforms and Applications
 Chap 3 Laplace Transforms and Applications LS 1 Basic Concepts Bilateral Laplace Transform: where is a complex variable Region of Convergence (ROC): The region of s for which the integral converges Transform
Chap 3 Laplace Transforms and Applications LS 1 Basic Concepts Bilateral Laplace Transform: where is a complex variable Region of Convergence (ROC): The region of s for which the integral converges Transform
Control Systems I. Lecture 5: Transfer Functions. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 5: Transfer Functions Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 20, 2017 E. Frazzoli (ETH) Lecture 5: Control Systems I 20/10/2017
Control Systems I Lecture 5: Transfer Functions Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 20, 2017 E. Frazzoli (ETH) Lecture 5: Control Systems I 20/10/2017
z Transform System Analysis
 z Transform System Analysis Block Diagrams and Transfer Functions Just as with continuous-time systems, discrete-time systems are conveniently described by block diagrams and transfer functions can be
z Transform System Analysis Block Diagrams and Transfer Functions Just as with continuous-time systems, discrete-time systems are conveniently described by block diagrams and transfer functions can be
Theory and Problems of Signals and Systems
 SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Dynamic Response
 .. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
.. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
Filter Analysis and Design
 Filter Analysis and Design Butterworth Filters Butterworth filters have a transfer function whose squared magnitude has the form H a ( jω ) 2 = 1 ( ) 2n. 1+ ω / ω c * M. J. Roberts - All Rights Reserved
Filter Analysis and Design Butterworth Filters Butterworth filters have a transfer function whose squared magnitude has the form H a ( jω ) 2 = 1 ( ) 2n. 1+ ω / ω c * M. J. Roberts - All Rights Reserved
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Unit 2: Modeling in the Frequency Domain Part 2: The Laplace Transform. The Laplace Transform. The need for Laplace
 Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
E2.5 Signals & Linear Systems. Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & 2)
") E.5 Signals & Linear Systems Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & ) 1. Sketch each of the following continuous-time signals, specify if the signal is periodic/non-periodic,
E.5 Signals & Linear Systems Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & ) 1. Sketch each of the following continuous-time signals, specify if the signal is periodic/non-periodic,
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Module 4. Related web links and videos. 1. FT and ZT
 Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
7.2 Relationship between Z Transforms and Laplace Transforms
 Chapter 7 Z Transforms 7.1 Introduction In continuous time, the linear systems we try to analyse and design have output responses y(t) that satisfy differential equations. In general, it is hard to solve
Chapter 7 Z Transforms 7.1 Introduction In continuous time, the linear systems we try to analyse and design have output responses y(t) that satisfy differential equations. In general, it is hard to solve
SIGNALS AND SYSTEMS LABORATORY 4: Polynomials, Laplace Transforms and Analog Filters in MATLAB
 INTRODUCTION SIGNALS AND SYSTEMS LABORATORY 4: Polynomials, Laplace Transforms and Analog Filters in MATLAB Laplace transform pairs are very useful tools for solving ordinary differential equations. Most
INTRODUCTION SIGNALS AND SYSTEMS LABORATORY 4: Polynomials, Laplace Transforms and Analog Filters in MATLAB Laplace transform pairs are very useful tools for solving ordinary differential equations. Most
ECE 3793 Matlab Project 3
 ECE 3793 Matlab Project 3 Spring 2017 Dr. Havlicek DUE: 04/25/2017, 11:59 PM What to Turn In: Make one file that contains your solution for this assignment. It can be an MS WORD file or a PDF file. Make
ECE 3793 Matlab Project 3 Spring 2017 Dr. Havlicek DUE: 04/25/2017, 11:59 PM What to Turn In: Make one file that contains your solution for this assignment. It can be an MS WORD file or a PDF file. Make
Representing a Signal
 The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
Spring 2014 ECEN Signals and Systems
 Spring 2014 ECEN 314-300 Signals and Systems Instructor: Jim Ji E-mail: jimji@tamu.edu Office Hours: Monday: 12-1:00 PM, Room 309E WEB WeChat ID: jimxiuquanji TA: Tao Yang, tao.yang.tamu@gmail.com TA Office
Spring 2014 ECEN 314-300 Signals and Systems Instructor: Jim Ji E-mail: jimji@tamu.edu Office Hours: Monday: 12-1:00 PM, Room 309E WEB WeChat ID: jimxiuquanji TA: Tao Yang, tao.yang.tamu@gmail.com TA Office
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform.
 Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Time Response of Systems
 Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Lecture 7: Laplace Transform and Its Applications Dr.-Ing. Sudchai Boonto
 Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand Outline Motivation The Laplace Transform The Laplace Transform
Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand Outline Motivation The Laplace Transform The Laplace Transform
EE 3054: Signals, Systems, and Transforms Summer It is observed of some continuous-time LTI system that the input signal.
 EE 34: Signals, Systems, and Transforms Summer 7 Test No notes, closed book. Show your work. Simplify your answers. 3. It is observed of some continuous-time LTI system that the input signal = 3 u(t) produces
EE 34: Signals, Systems, and Transforms Summer 7 Test No notes, closed book. Show your work. Simplify your answers. 3. It is observed of some continuous-time LTI system that the input signal = 3 u(t) produces
CH.6 Laplace Transform
 CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
Numeric Matlab for Laplace Transforms
 EE 213 Spring 2008 LABORATORY # 4 Numeric Matlab for Laplace Transforms Objective: The objective of this laboratory is to introduce some numeric Matlab commands that are useful with Laplace transforms
EE 213 Spring 2008 LABORATORY # 4 Numeric Matlab for Laplace Transforms Objective: The objective of this laboratory is to introduce some numeric Matlab commands that are useful with Laplace transforms
Identification Methods for Structural Systems. Prof. Dr. Eleni Chatzi System Stability - 26 March, 2014
 Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can
Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can
Z-Transform. The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = g(t)e st dt. Z : G(z) =
 = g(t)e st dt. Z : G(z) =") Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
ECE 3084 QUIZ 2 SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING GEORGIA INSTITUTE OF TECHNOLOGY APRIL 2, Name:
 ECE 3084 QUIZ 2 SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING GEORGIA INSTITUTE OF TECHNOLOGY APRIL 2, 205 Name:. The quiz is closed book, except for one 2-sided sheet of handwritten notes. 2. Turn off
ECE 3084 QUIZ 2 SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING GEORGIA INSTITUTE OF TECHNOLOGY APRIL 2, 205 Name:. The quiz is closed book, except for one 2-sided sheet of handwritten notes. 2. Turn off
EE Homework 5 - Solutions
 EE054 - Homework 5 - Solutions 1. We know the general result that the -transform of α n 1 u[n] is with 1 α 1 ROC α < < and the -transform of α n 1 u[ n 1] is 1 α 1 with ROC 0 < α. Using this result, the
EE054 - Homework 5 - Solutions 1. We know the general result that the -transform of α n 1 u[n] is with 1 α 1 ROC α < < and the -transform of α n 1 u[ n 1] is 1 α 1 with ROC 0 < α. Using this result, the
Notes for ECE-320. Winter by R. Throne
 Notes for ECE-3 Winter 4-5 by R. Throne Contents Table of Laplace Transforms 5 Laplace Transform Review 6. Poles and Zeros.................................... 6. Proper and Strictly Proper Transfer Functions...................
Notes for ECE-3 Winter 4-5 by R. Throne Contents Table of Laplace Transforms 5 Laplace Transform Review 6. Poles and Zeros.................................... 6. Proper and Strictly Proper Transfer Functions...................
Digital Signal Processing
 Digital Signal Processing The -Transform and Its Application to the Analysis of LTI Systems Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Cech
Digital Signal Processing The -Transform and Its Application to the Analysis of LTI Systems Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Cech
INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto
 INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
SYLLABUS. osmania university CHAPTER - 1 : TRANSIENT RESPONSE CHAPTER - 2 : LAPLACE TRANSFORM OF SIGNALS
 i SYLLABUS osmania university UNIT - I CHAPTER - 1 : TRANSIENT RESPONSE Initial Conditions in Zero-Input Response of RC, RL and RLC Networks, Definitions of Unit Impulse, Unit Step and Ramp Functions,
i SYLLABUS osmania university UNIT - I CHAPTER - 1 : TRANSIENT RESPONSE Initial Conditions in Zero-Input Response of RC, RL and RLC Networks, Definitions of Unit Impulse, Unit Step and Ramp Functions,
Problem Value
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-04 COURSE: ECE-2025 NAME: GT #: LAST, FIRST Recitation Section: Circle the date & time when your Recitation
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-04 COURSE: ECE-2025 NAME: GT #: LAST, FIRST Recitation Section: Circle the date & time when your Recitation
EE Experiment 11 The Laplace Transform and Control System Characteristics
 EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
EE/ME/AE324: Dynamical Systems. Chapter 7: Transform Solutions of Linear Models
 EE/ME/AE324: Dynamical Systems Chapter 7: Transform Solutions of Linear Models The Laplace Transform Converts systems or signals from the real time domain, e.g., functions of the real variable t, to the
EE/ME/AE324: Dynamical Systems Chapter 7: Transform Solutions of Linear Models The Laplace Transform Converts systems or signals from the real time domain, e.g., functions of the real variable t, to the
ECE 350 Signals and Systems Spring 2011 Final Exam - Solutions. Three 8 ½ x 11 sheets of notes, and a calculator are allowed during the exam.
 ECE 35 Spring - Final Exam 9 May ECE 35 Signals and Systems Spring Final Exam - Solutions Three 8 ½ x sheets of notes, and a calculator are allowed during the exam Write all answers neatly and show your
ECE 35 Spring - Final Exam 9 May ECE 35 Signals and Systems Spring Final Exam - Solutions Three 8 ½ x sheets of notes, and a calculator are allowed during the exam Write all answers neatly and show your
Introduction & Laplace Transforms Lectures 1 & 2
 Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
Transform Solutions to LTI Systems Part 3
 Transform Solutions to LTI Systems Part 3 Example of second order system solution: Same example with increased damping: k=5 N/m, b=6 Ns/m, F=2 N, m=1 Kg Given x(0) = 0, x (0) = 0, find x(t). The revised
Transform Solutions to LTI Systems Part 3 Example of second order system solution: Same example with increased damping: k=5 N/m, b=6 Ns/m, F=2 N, m=1 Kg Given x(0) = 0, x (0) = 0, find x(t). The revised
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012
 The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012 Time: 3 hours. Close book, closed notes. No calculators. Part I: ANSWER ALL PARTS. WRITE
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Final May 4, 2012 Time: 3 hours. Close book, closed notes. No calculators. Part I: ANSWER ALL PARTS. WRITE
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
UNIVERSITY OF TORONTO - FACULTY OF APPLIED SCIENCE AND ENGINEERING Department of Electrical and Computer Engineering
 UNIVERSITY OF TORONTO - FACULTY OF APPLIED SCIENCE AND ENGINEERING Department of Electrical and Computer Engineering MAT290H1F: ADVANCED ENGINEERING MATHEMATICS - COURSE SYLLABUS FOR FALL 2014 COURSE OBJECTIVES
UNIVERSITY OF TORONTO - FACULTY OF APPLIED SCIENCE AND ENGINEERING Department of Electrical and Computer Engineering MAT290H1F: ADVANCED ENGINEERING MATHEMATICS - COURSE SYLLABUS FOR FALL 2014 COURSE OBJECTIVES
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
LECTURE 12 Sections Introduction to the Fourier series of periodic signals
 Signals and Systems I Wednesday, February 11, 29 LECURE 12 Sections 3.1-3.3 Introduction to the Fourier series of periodic signals Chapter 3: Fourier Series of periodic signals 3. Introduction 3.1 Historical
Signals and Systems I Wednesday, February 11, 29 LECURE 12 Sections 3.1-3.3 Introduction to the Fourier series of periodic signals Chapter 3: Fourier Series of periodic signals 3. Introduction 3.1 Historical
MATHEMATICAL MODELING OF CONTROL SYSTEMS
 1 MATHEMATICAL MODELING OF CONTROL SYSTEMS Sep-14 Dr. Mohammed Morsy Outline Introduction Transfer function and impulse response function Laplace Transform Review Automatic control systems Signal Flow
1 MATHEMATICAL MODELING OF CONTROL SYSTEMS Sep-14 Dr. Mohammed Morsy Outline Introduction Transfer function and impulse response function Laplace Transform Review Automatic control systems Signal Flow
ELEC2400 Signals & Systems
 ELEC2400 Signals & Systems Chapter 7. Z-Transforms Brett Ninnes brett@newcastle.edu.au. School of Electrical Engineering and Computer Science The University of Newcastle Slides by Juan I. Yu (jiyue@ee.newcastle.edu.au
ELEC2400 Signals & Systems Chapter 7. Z-Transforms Brett Ninnes brett@newcastle.edu.au. School of Electrical Engineering and Computer Science The University of Newcastle Slides by Juan I. Yu (jiyue@ee.newcastle.edu.au
Poles, Zeros and System Response
 Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
ECE 301 Division 1, Fall 2008 Instructor: Mimi Boutin Final Examination Instructions:
 ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
Design of IIR filters
 Design of IIR filters Standard methods of design of digital infinite impulse response (IIR) filters usually consist of three steps, namely: 1 design of a continuous-time (CT) prototype low-pass filter;
Design of IIR filters Standard methods of design of digital infinite impulse response (IIR) filters usually consist of three steps, namely: 1 design of a continuous-time (CT) prototype low-pass filter;
Transient Response of a Second-Order System
 Transient Response of a Second-Order System ECEN 830 Spring 01 1. Introduction In connection with this experiment, you are selecting the gains in your feedback loop to obtain a well-behaved closed-loop
Transient Response of a Second-Order System ECEN 830 Spring 01 1. Introduction In connection with this experiment, you are selecting the gains in your feedback loop to obtain a well-behaved closed-loop
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
ECE 301 Fall 2010 Division 2 Homework 10 Solutions. { 1, if 2n t < 2n + 1, for any integer n, x(t) = 0, if 2n 1 t < 2n, for any integer n.
 = 0, if 2n 1 t < 2n, for any integer n.") ECE 3 Fall Division Homework Solutions Problem. Reconstruction of a continuous-time signal from its samples. Consider the following periodic signal, depicted below: {, if n t < n +, for any integer n,
ECE 3 Fall Division Homework Solutions Problem. Reconstruction of a continuous-time signal from its samples. Consider the following periodic signal, depicted below: {, if n t < n +, for any integer n,
Digital Signal Processing, Homework 2, Spring 2013, Prof. C.D. Chung. n; 0 n N 1, x [n] = N; N n. ) (n N) u [n N], z N 1. x [n] = u [ n 1] + Y (z) =
![Digital Signal Processing, Homework 2, Spring 2013, Prof. C.D. Chung. n; 0 n N 1, x [n] = N; N n. ) (n N) u [n N], z N 1. x [n] = u [ n 1] + Y (z) =](/thumbs/93/113024879.jpg "Digital Signal Processing, Homework 2, Spring 2013, Prof. C.D. Chung. n; 0 n N 1, x [n] = N; N n. ) (n N) u [n N], z N 1. x [n] = u [ n 1] + Y (z) =") Digital Signal Processing, Homework, Spring 0, Prof CD Chung (05%) Page 67, Problem Determine the z-transform of the sequence n; 0 n N, x [n] N; N n x [n] n; 0 n N, N; N n nx [n], z d dz X (z) ) nu [n],
Digital Signal Processing, Homework, Spring 0, Prof CD Chung (05%) Page 67, Problem Determine the z-transform of the sequence n; 0 n N, x [n] N; N n x [n] n; 0 n N, N; N n nx [n], z d dz X (z) ) nu [n],
Line Spectra and their Applications
 In [ ]: cd matlab pwd Line Spectra and their Applications Scope and Background Reading This session concludes our introduction to Fourier Series. Last time (http://nbviewer.jupyter.org/github/cpjobling/eg-47-
In [ ]: cd matlab pwd Line Spectra and their Applications Scope and Background Reading This session concludes our introduction to Fourier Series. Last time (http://nbviewer.jupyter.org/github/cpjobling/eg-47-
First and Second Order Circuits. Claudio Talarico, Gonzaga University Spring 2015
 First and Second Order Circuits Claudio Talarico, Gonzaga University Spring 2015 Capacitors and Inductors intuition: bucket of charge q = Cv i = C dv dt Resist change of voltage DC open circuit Store voltage
First and Second Order Circuits Claudio Talarico, Gonzaga University Spring 2015 Capacitors and Inductors intuition: bucket of charge q = Cv i = C dv dt Resist change of voltage DC open circuit Store voltage
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
ECE 486 Control Systems
 ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
Andrea Zanchettin Automatic Control AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Linear systems (frequency domain)
") 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear systems (frequency domain) 2 Motivations Consider an LTI system Thanks to the Lagrange s formula we can compute the motion of
1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear systems (frequency domain) 2 Motivations Consider an LTI system Thanks to the Lagrange s formula we can compute the motion of
Z-Transform. 清大電機系林嘉文 Original PowerPoint slides prepared by S. K. Mitra 4-1-1
 Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
ECE 301. Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3
 ECE 30 Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3 Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out
ECE 30 Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3 Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions
 Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions Objectives Scope of this Lecture: Previously we understood the meaning of causal systems, stable systems
Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions Objectives Scope of this Lecture: Previously we understood the meaning of causal systems, stable systems
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
George Mason University Signals and Systems I Spring 2016
 George Mason University Signals and Systems I Spring 206 Problem Set #6 Assigned: March, 206 Due Date: March 5, 206 Reading: This problem set is on Fourier series representations of periodic signals. The
George Mason University Signals and Systems I Spring 206 Problem Set #6 Assigned: March, 206 Due Date: March 5, 206 Reading: This problem set is on Fourier series representations of periodic signals. The
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam. Cover Sheet
 Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
ECE 202 Fall 2013 Final Exam
 ECE 202 Fall 2013 Final Exam December 12, 2013 Circle your division: Division 0101: Furgason (8:30 am) Division 0201: Bermel (9:30 am) Name (Last, First) Purdue ID # There are 18 multiple choice problems
ECE 202 Fall 2013 Final Exam December 12, 2013 Circle your division: Division 0101: Furgason (8:30 am) Division 0201: Bermel (9:30 am) Name (Last, First) Purdue ID # There are 18 multiple choice problems
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
Identification Methods for Structural Systems
 Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
CHEE 319 Tutorial 3 Solutions. 1. Using partial fraction expansions, find the causal function f whose Laplace transform. F (s) F (s) = C 1 s + C 2
 F (s) = C 1 s + C 2") CHEE 39 Tutorial 3 Solutions. Using partial fraction expansions, find the causal function f whose Laplace transform is given by: F (s) 0 f(t)e st dt (.) F (s) = s(s+) ; Solution: Note that the polynomial
CHEE 39 Tutorial 3 Solutions. Using partial fraction expansions, find the causal function f whose Laplace transform is given by: F (s) 0 f(t)e st dt (.) F (s) = s(s+) ; Solution: Note that the polynomial
Circuit Analysis Using Fourier and Laplace Transforms
 EE2015: Electrical Circuits and Networks Nagendra Krishnapura https://wwweeiitmacin/ nagendra/ Department of Electrical Engineering Indian Institute of Technology, Madras Chennai, 600036, India July-November
EE2015: Electrical Circuits and Networks Nagendra Krishnapura https://wwweeiitmacin/ nagendra/ Department of Electrical Engineering Indian Institute of Technology, Madras Chennai, 600036, India July-November
ENGIN 211, Engineering Math. Laplace Transforms
 ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
9.5 The Transfer Function
 Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Problem Weight Score Total 100
 EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total