Proximal Newton Method. Zico Kolter (notes by Ryan Tibshirani) Convex Optimization
|
|
|
- Cory Waters
- 5 years ago
- Views:
Transcription
1 Proximal Newton Method Zico Kolter (notes by Ryan Tibshirani) Convex Optimization
2 Consider the problem Last time: quasi-newton methods min x f(x) with f convex, twice differentiable, dom(f) = R n. Generic form of quasi-newton method: start with x (0) R n, and repeat: x (k) = x (k 1) t k C (k 1) x (k 1), k = 1, 2, 3,... where C (k 1) ( 2 f(x (k 1) )) 1, an approximation to the inverse Hessian at x (k 1). Step sizes chosen by backtracking. Key: C (0) is easily computed, and C (k 1) is easily updated from C (k 2), k 2 SR1: rank 1 update for Hessian, use SM for inverse Hessian DFP: rank 2 update for inverse Hessian, use SM for Hessian BFGS: reverse roles of Hessian and inverse Hessian in DFP LBFGS: limited memory version of BFGS, very popular 2
3 Outline Today: Proximal Newton method Backtracking line search Convergence analysis Notable examples Projected Newton method 3
4 Reminder: proximal gradient descent Recall that proximal gradient descent operates on a problem min x g(x) + h(x) where g is convex, smooth and h is convex, simple. We repeat x (k) = prox tk ( x (k 1) t k g(x (k 1) ) ), k = 1, 2, 3,... where prox t ( ) is the proximal operator associated with h, prox t (x) = argmin z 1 2t x z h(z) Difficulty of iterations is in applying prox, which depends only on h (assuming that g is computable) Proximal gradient descent enjoys same convergence rate as its fully smooth version, and is hence useful when prox is efficient 4
5 Recall motivation for prox gradient: iteratively minimize quadratic expansion in g, plus original h x + = argmin z = argmin z 1 2t x t g(x) z h(z) g(x) T (z x) + 1 2t z x h(z) Quadratic approximation uses 1 t I (spherical curvature), as in pure gradient descent when h = 0 A fundamental difference between gradient descent and Newton s method: latter also iteratively minimizes quadratic approximations, but these use the local Hessian of the function in question So what happens if we replace 1 t I in the above with 2 g(x)? 5
6 Proximal Newton method This leads us to proximal Newton method: we repeat v (k) = argmin g(x (k 1) ) T v + 1 v 2 vt H (k 1) v + h(x (k 1) + v) x (k) = x (k 1) + t k v (k) Here H (k 1) = 2 g(x (k 1) ) is the Hessian at x (k 1), and t k is a step size. Equivalent formulation: { g(x (k 1) ) T (z x (k 1) ) + z (k) = argmin z x (k) = x (k 1) + t k (z (k) x (k 1) ) 1 2 (z x(k 1) ) T H (k 1) (z x (k 1) ) + h(z) } 6
7 Given H 0, define Scaled proximal map prox H (x) = argmin z 1 2 x z 2 H + h(z) where x 2 H = xt Hx. This is called a scaled proximal map With H = 1 t I, we get back usual (unscaled) definition. In general, the scaled prox shares retains many of the nice properties of usual prox (e.g., uniqueness, nonexpansiveness) Now consider z + = argmin z = argmin z g(x) T (z x) (z x)t H(z x) + h(z) 1 2 x H 1 g(x) z 2 H + h(z) 7
8 Thus another equivalent form for proximal Newton update: z (k) ( = prox H (k 1) x (k 1) (H (k 1) ) 1 g(x (k 1) ) ) Notes: x (k) = x (k 1) + t k (z (k) x (k 1) ) When h(z) = 0, we get back the usual Newton update If we replaced H (k 1) by 1 r k I, and set t k = 1, we get proximal gradient update, with step size r k Difficulty of prox depends strongly on h. However, now it also depends on the structure of the Hessian of g E.g., having a diagonal or banded Hessian generally makes a big difference compared to a dense Hessian 8
9 Backtracking line search As with Newton s method in fully smooth problems, pure step sizes t k = 1, k = 1, 2, 3,... need not converge. We apply backtracking line search: fix 0 < α 1/2, 0 < β < 1, and let v = prox H ( x H 1 g(x) ) x be the proximal Newton direction at a given iteration. Start with t = 1, and while f(x + tv) > f(x) + αt g(x) T v + α ( h(x + tv) h(x) ) we shrink t = βt. (Here f = g + h) Note: this scheme is actually of a different spirit than the one we studied for proximal gradient descent, as it avoids recomputing the prox at each inner backtracking iteration 9
10 10 When would we use proximal Newton? High-level picture, for problem: min x Proximal gradient Iteratively minimize b x h(x) Often closed-form prox Iterations are cheap Convergence of gradient descent g(x) + h(x) Proximal Newton Iteratively minimize b T x + x T Ax + h(x) Almost never closed-form prox Iterations are very very expensive Convergence of Newton s method So we use proximal Newton when we have an fast inner optimizer for scaled prox (quadratic plus h), expect few iterations
11 11 Convergence analysis Following Lee et al. (2012), assume that f = g + h, where g, h are convex and g is twice smooth. Assume further: mi 2 g LI, and 2 g Lipschitz with parameter M prox H ( ) is exactly evaluable Theorem: Proximal Newton method with backtracking line search converges globally. Furthermore, for all k k 0, x (k) x 2 M 2m x(k 1) x 2 2 Recall that this is called local quadratic convergence. After k k 0, to get within f(x (k) ) f ɛ, we need O(log log(1/ɛ)) iterations. Note: each iteration uses scaled prox evaluation!
12 12 Proof sketch To prove global convergence, can show that at any step, the backtracking exit condition will be satisfied by t min {1, 2m } L (1 α) Use this to show that the update direction converges to zero, which can only happen at the global minimum To prove local quadratic convergence, can show that for large enough k, the pure step t = 1 eventually satisfies backtracking exit condition. Therefore x + x 2 lowest eigenvalue bound 1 m x + x H nonexpansiveness, Lipschitzness, largest eigenvalue M 2m x x 2 2
13 13 Glmnet and QUIC Two notable examples of proximal Newton methods: glmnet (Friedman et al., 2009): prox Newton for l 1 penalized generalized linear models, inner probs solved using coordinate descent QUIC (Hsiesh et al., 2011): prox Newton for graphical lasso problem, uses factorization tricks, inner probs use coordinate descent Both of these implementations are very widely used for their own purposes. At the proper scale, these are state-of-the-art General note: proximal Newton method will use far less evaluations of (gradient of) g than proximal gradient. When these evaluations are expensive, proximal Newton can win
14 14 Example: lasso logistic regression Example from Lee et al. (2012): l 1 regularized logistic regression, FISTA (accelerated prox grad) versus sparsa (spectral projected gradient method) versus PN (proximal Newton) Problem with n = 5000, p = 6000, and a dense feature matrix X Relative suboptimality FISTA SpaRSA PN Function evaluations Relative suboptimality FISTA SpaRSA PN Time (sec) Here cost is dominated by expensive g, g (exp, log) evaluations
15 Again, the regularization term w 1 promotes sparse solutions and λ balances sparsity with goodness-of-fit. We use two datasets: (i) gisette, a handwritten digits dataset from the NIPS 2003 feature selection challenge (n = 5000), and (ii) rcv1, an archive of categorized news stories from Reuters (n =47, 000). 2 The features of gisette have been scaled to be within the interval [ 1, 1], and those of rcv1 have been scaled to be unit vectors. 15 Problem with n = 542, 000, p = 47, 000, and sparse matrix X Relative suboptimality FISTA SpaRSA PN Function evaluations Relative suboptimality FISTA SpaRSA PN Time (sec) Fig. 4.4: Logistic regression problem (rcv1 dataset). Proximal L-BFGS method (L =50)versusFISTAandSpaRSA. Now evaluating g, g make up less of total cost, since X is sparse
16 16 Inexact prox evaluations An important point: with proximal Newton, we essentially always perform inexact prox evaluations (not so with proximal gradient) Example from Lee et al. (2012): graphical lasso estimation, three stopping rules for inner optimizations. Here n = 72 and p = 1255 Relative suboptimality adaptive maxiter = 10 exact Function evaluations Relative suboptimality adaptive maxiter = 10 exact Time (sec) Conclusion is that 10 inner iterations is not enough to ensure fast (quadratic) convergence, but their adaptive stopping rule is
17 17 For usual (smooth) Newton method, inner problem is to minimize g k 1 quadratic approximation to g about x (k 1). Stop when g k 1 (x (k) ) 2 η k g(x (k 1) ) 2 for a specifically chosen forcing sequence η k, k = 1, 2, 3,... For proximal Newton, Lee et al. (2012) advocate the analogy that uses generalized gradients in place of gradients G fk 1 /M (x(k) ) 2 η k G f/m (x (k 1) ) 2 where f k 1 = g k 1 + h, and recall that m 2 g MI. Setting { m η k = min 2, G fk 2/M (x(k 1) ) G f/m (x (k 1) ) } 2 G f/m (x (k 2) ) 2 they prove that inexact proximal Newton has local superlinear rate
18 18 Proximal quasi-newton methods For large problems, computing the Hessian is prohibitive. Proximal quasi-newton avoids forming H (k 1) = 2 g(x (k 1) ) at each step Lee et al. (2012) propose BFGS-type updating rules. These work very well empirically, local superlinear convergence Tseng and Yun (2009) consider smooth plus block separable problems, propose approximating the Hessian in a blockwise fashion. Helpful because only small Hessians are ever needed. Their method has linear convergence Quasi-Newton can be helpful not only when Hessian is burdensome computationally, but also when it is ill-conditioned: singular or near singular
19 19 What s wrong with projected Newton? When h = I C (x), indicator function of convex set C, our problem: min x g(x) subject to x C Proximal gradient descent in this case reduces to projected gradient descent. What about proximal Newton? Updates are based on z + = argmin z C = argmin z C 1 2 x H 1 g(x) z 2 H g(x) T (z x) (z x)t H(z x) Note when H = I this a projection of x g(x) onto C, but not a projection in general! In fact, it is much more complicated. Hence, projected Newton does not generally follow from proximal Newton
20 20 Projected Newton for box constraints Projected Newton method can be made to work for box constraints (Bertsekas, 1982; Kim et al., 2010; Schmidt et al., 2011). Given min x g(x) subject to l x u the projected Newton method specifies an initial point x (0), small constant ɛ > 0, and repeats the following steps for k = 1, 2, 3,... Define the binding set B k 1 = {i : x (k 1) i l i + ɛ and i g(x (k 1) ) > 0} {i : x (k 1) i u i ɛ and i g(x (k 1) ) < 0} These are the variables that are at (close to) boundary, and moving them inward would increase the criterion
21 21 Define the free set F k 1 = {1,... n} \ B k 1 Define the inverse of the principal submatrix of the Hessian along the free variables S (k 1) = [( 2 g(x (k 1) ) ) F k 1 ] 1 Take a Newton step along the free variables only, then project: ( [ ] [ x (k) = P [l,u] x (k 1) S (k 1) 0 Fk 1 g(x t (k 1) ]) ) k 0 I Bk 1 g(x (k 1) ) where P [l,u] is the projection onto [l, u] = [l 1, u 1 ]... [l n, u n ] Note that the update leaves binding set effectively untouched
22 22 Convergence properties Convergence: Bertsekas (1982) shows that, under appropriate assumptions, projected Newton identifies the proper binding constraints in a finite number of iterations. Then it is just the usual Newton s method on the free variables Bertsekas (1982) also proves superlinear convergence Kim et al. (2010), Schmidt et al. (2011) describe a projected quasi-newton method, using BFGS-style updates What kinds of problems have box constraints? Lots, it turns out! Nonnegative least squares Support vector machine dual Graphical lasso dual Fused lasso (TV denoising) dual

:")


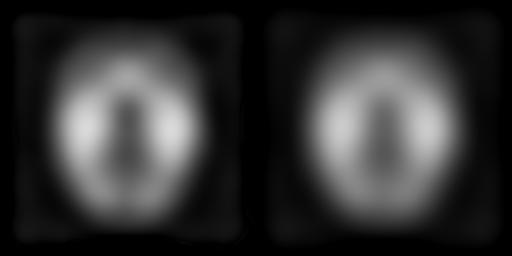

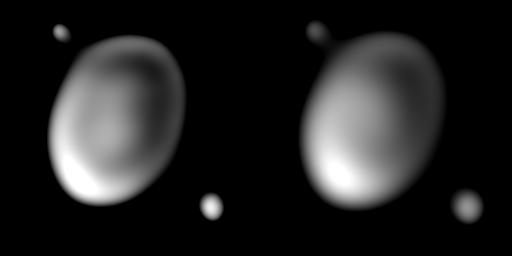
23 23 Example from Kim et al. (2010): image deblurring performed with nonnegative KL divergence minimization Original image Blurred image PQN-LBFGS LBFGS-B
24 24 References Proximal Newton method: J. Friedman and T. Hastie and R. Tibshirani (2009), Regularization paths for generalized linear models via coordinate descent C.J. Hsiesh and M.A. Sustik and I. Dhillon and P. Ravikumar (2011), Sparse inverse covariance matrix estimation using quadratic approximation M. Patriksson (1998), Cost approximation: a unified framework of descent algorithms for nonlinear programs J. Lee and Y. Sun and M. Saunders (2014), Proximal Newton-type methods for minimizing composite functions P. Tseng and S. Yun (2009), A coordinate gradient descent method for nonsmooth separable minimization
25 25 Projected Newton method: A. Barbero and S. Sra (2011), Fast Newton-type methods for total variation regularization D. Bertsekas (1982), Projected Newton methods for optimization problems with simple constraints D. Kim and S. Sra. and I. Dhillon (2010), Tackling box-constrained optimization via a new projected quasi-newton approach M. Schmidt and D. Kim and S. Sra (2011), Projected Newton-type methods in machine learning
Proximal Newton Method. Ryan Tibshirani Convex Optimization /36-725
 Proximal Newton Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: primal-dual interior-point method Given the problem min x subject to f(x) h i (x) 0, i = 1,... m Ax = b where f, h
Proximal Newton Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: primal-dual interior-point method Given the problem min x subject to f(x) h i (x) 0, i = 1,... m Ax = b where f, h
Lecture 17: October 27
 0-725/36-725: Convex Optimiation Fall 205 Lecturer: Ryan Tibshirani Lecture 7: October 27 Scribes: Brandon Amos, Gines Hidalgo Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These
0-725/36-725: Convex Optimiation Fall 205 Lecturer: Ryan Tibshirani Lecture 7: October 27 Scribes: Brandon Amos, Gines Hidalgo Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These
Newton s Method. Ryan Tibshirani Convex Optimization /36-725
 Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Technical report no. SOL Department of Management Science and Engineering, Stanford University, Stanford, California, September 15, 2013.
 PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL A. SAUNDERS Abstract. We generalize Newton-type methods for minimizing smooth functions to handle a
PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL A. SAUNDERS Abstract. We generalize Newton-type methods for minimizing smooth functions to handle a
Lecture 14: October 17
 1-725/36-725: Convex Optimization Fall 218 Lecture 14: October 17 Lecturer: Lecturer: Ryan Tibshirani Scribes: Pengsheng Guo, Xian Zhou Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
1-725/36-725: Convex Optimization Fall 218 Lecture 14: October 17 Lecturer: Lecturer: Ryan Tibshirani Scribes: Pengsheng Guo, Xian Zhou Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
Proximal Gradient Descent and Acceleration. Ryan Tibshirani Convex Optimization /36-725
 Proximal Gradient Descent and Acceleration Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: subgradient method Consider the problem min f(x) with f convex, and dom(f) = R n. Subgradient method:
Proximal Gradient Descent and Acceleration Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: subgradient method Consider the problem min f(x) with f convex, and dom(f) = R n. Subgradient method:
Conditional Gradient (Frank-Wolfe) Method
 Method") Conditional Gradient (Frank-Wolfe) Method Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 1 Outline Today: Conditional gradient method Convergence analysis Properties
Conditional Gradient (Frank-Wolfe) Method Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 1 Outline Today: Conditional gradient method Convergence analysis Properties
Newton s Method. Javier Peña Convex Optimization /36-725
 Newton s Method Javier Peña Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, f ( (y) = max y T x f(x) ) x Properties and
Newton s Method Javier Peña Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, f ( (y) = max y T x f(x) ) x Properties and
Gradient Descent. Ryan Tibshirani Convex Optimization /36-725
 Gradient Descent Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: canonical convex programs Linear program (LP): takes the form min x subject to c T x Gx h Ax = b Quadratic program (QP): like
Gradient Descent Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: canonical convex programs Linear program (LP): takes the form min x subject to c T x Gx h Ax = b Quadratic program (QP): like
Lecture 9: September 28
 0-725/36-725: Convex Optimization Fall 206 Lecturer: Ryan Tibshirani Lecture 9: September 28 Scribes: Yiming Wu, Ye Yuan, Zhihao Li Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These
0-725/36-725: Convex Optimization Fall 206 Lecturer: Ryan Tibshirani Lecture 9: September 28 Scribes: Yiming Wu, Ye Yuan, Zhihao Li Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These
Stochastic Gradient Descent. Ryan Tibshirani Convex Optimization
 Stochastic Gradient Descent Ryan Tibshirani Convex Optimization 10-725 Last time: proximal gradient descent Consider the problem min x g(x) + h(x) with g, h convex, g differentiable, and h simple in so
Stochastic Gradient Descent Ryan Tibshirani Convex Optimization 10-725 Last time: proximal gradient descent Consider the problem min x g(x) + h(x) with g, h convex, g differentiable, and h simple in so
Coordinate descent. Geoff Gordon & Ryan Tibshirani Optimization /
 Coordinate descent Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725 1 Adding to the toolbox, with stats and ML in mind We ve seen several general and useful minimization tools First-order methods
Coordinate descent Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725 1 Adding to the toolbox, with stats and ML in mind We ve seen several general and useful minimization tools First-order methods
Selected Topics in Optimization. Some slides borrowed from
 Selected Topics in Optimization Some slides borrowed from http://www.stat.cmu.edu/~ryantibs/convexopt/ Overview Optimization problems are almost everywhere in statistics and machine learning. Input Model
Selected Topics in Optimization Some slides borrowed from http://www.stat.cmu.edu/~ryantibs/convexopt/ Overview Optimization problems are almost everywhere in statistics and machine learning. Input Model
Optimization methods
 Optimization methods Optimization-Based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_spring16 Carlos Fernandez-Granda /8/016 Introduction Aim: Overview of optimization methods that Tend to
Optimization methods Optimization-Based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_spring16 Carlos Fernandez-Granda /8/016 Introduction Aim: Overview of optimization methods that Tend to
Quasi-Newton Methods. Zico Kolter (notes by Ryan Tibshirani, Javier Peña, Zico Kolter) Convex Optimization
 Convex Optimization") Quasi-Newton Methods Zico Kolter (notes by Ryan Tibshirani, Javier Peña, Zico Kolter) Convex Optimization 10-725 Last time: primal-dual interior-point methods Given the problem min x f(x) subject to h(x)
Quasi-Newton Methods Zico Kolter (notes by Ryan Tibshirani, Javier Peña, Zico Kolter) Convex Optimization 10-725 Last time: primal-dual interior-point methods Given the problem min x f(x) subject to h(x)
Gradient descent. Barnabas Poczos & Ryan Tibshirani Convex Optimization /36-725
 Gradient descent Barnabas Poczos & Ryan Tibshirani Convex Optimization 10-725/36-725 1 Gradient descent First consider unconstrained minimization of f : R n R, convex and differentiable. We want to solve
Gradient descent Barnabas Poczos & Ryan Tibshirani Convex Optimization 10-725/36-725 1 Gradient descent First consider unconstrained minimization of f : R n R, convex and differentiable. We want to solve
Approximation. Inderjit S. Dhillon Dept of Computer Science UT Austin. SAMSI Massive Datasets Opening Workshop Raleigh, North Carolina.
 Using Quadratic Approximation Inderjit S. Dhillon Dept of Computer Science UT Austin SAMSI Massive Datasets Opening Workshop Raleigh, North Carolina Sept 12, 2012 Joint work with C. Hsieh, M. Sustik and
Using Quadratic Approximation Inderjit S. Dhillon Dept of Computer Science UT Austin SAMSI Massive Datasets Opening Workshop Raleigh, North Carolina Sept 12, 2012 Joint work with C. Hsieh, M. Sustik and
c 2014 Society for Industrial and Applied Mathematics
 SIAM J. OPTIM. Vol. 24, No. 3, pp. 1420 1443 c 2014 Society for Industrial and Applied Mathematics PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL
SIAM J. OPTIM. Vol. 24, No. 3, pp. 1420 1443 c 2014 Society for Industrial and Applied Mathematics PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL
ECE G: Special Topics in Signal Processing: Sparsity, Structure, and Inference
 ECE 18-898G: Special Topics in Signal Processing: Sparsity, Structure, and Inference Sparse Recovery using L1 minimization - algorithms Yuejie Chi Department of Electrical and Computer Engineering Spring
ECE 18-898G: Special Topics in Signal Processing: Sparsity, Structure, and Inference Sparse Recovery using L1 minimization - algorithms Yuejie Chi Department of Electrical and Computer Engineering Spring
arxiv: v13 [stat.ml] 17 Mar 2014
![arxiv: v13 [stat.ml] 17 Mar 2014](/thumbs/72/66286375.jpg "arxiv: v13 [stat.ml] 17 Mar 2014") PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL A. SAUNDERS arxiv:1206.1623v13 [stat.ml] 17 Mar 2014 Abstract. We generalize Newton-type methods for
PROXIMAL NEWTON-TYPE METHODS FOR MINIMIZING COMPOSITE FUNCTIONS JASON D. LEE, YUEKAI SUN, AND MICHAEL A. SAUNDERS arxiv:1206.1623v13 [stat.ml] 17 Mar 2014 Abstract. We generalize Newton-type methods for
Frank-Wolfe Method. Ryan Tibshirani Convex Optimization
 Frank-Wolfe Method Ryan Tibshirani Convex Optimization 10-725 Last time: ADMM For the problem min x,z f(x) + g(z) subject to Ax + Bz = c we form augmented Lagrangian (scaled form): L ρ (x, z, w) = f(x)
Frank-Wolfe Method Ryan Tibshirani Convex Optimization 10-725 Last time: ADMM For the problem min x,z f(x) + g(z) subject to Ax + Bz = c we form augmented Lagrangian (scaled form): L ρ (x, z, w) = f(x)
CPSC 540: Machine Learning
 CPSC 540: Machine Learning Proximal-Gradient Mark Schmidt University of British Columbia Winter 2018 Admin Auditting/registration forms: Pick up after class today. Assignment 1: 2 late days to hand in
CPSC 540: Machine Learning Proximal-Gradient Mark Schmidt University of British Columbia Winter 2018 Admin Auditting/registration forms: Pick up after class today. Assignment 1: 2 late days to hand in
Lecture 5: September 12
 10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 12 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Barun Patra and Tyler Vuong Note: LaTeX template courtesy of UC Berkeley EECS
10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 12 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Barun Patra and Tyler Vuong Note: LaTeX template courtesy of UC Berkeley EECS
Convex Optimization Algorithms for Machine Learning in 10 Slides
 Convex Optimization Algorithms for Machine Learning in 10 Slides Presenter: Jul. 15. 2015 Outline 1 Quadratic Problem Linear System 2 Smooth Problem Newton-CG 3 Composite Problem Proximal-Newton-CD 4 Non-smooth,
Convex Optimization Algorithms for Machine Learning in 10 Slides Presenter: Jul. 15. 2015 Outline 1 Quadratic Problem Linear System 2 Smooth Problem Newton-CG 3 Composite Problem Proximal-Newton-CD 4 Non-smooth,
Lecture 5: Gradient Descent. 5.1 Unconstrained minimization problems and Gradient descent
 10-725/36-725: Convex Optimization Spring 2015 Lecturer: Ryan Tibshirani Lecture 5: Gradient Descent Scribes: Loc Do,2,3 Disclaimer: These notes have not been subjected to the usual scrutiny reserved for
10-725/36-725: Convex Optimization Spring 2015 Lecturer: Ryan Tibshirani Lecture 5: Gradient Descent Scribes: Loc Do,2,3 Disclaimer: These notes have not been subjected to the usual scrutiny reserved for
Stochastic Optimization Algorithms Beyond SG
 Stochastic Optimization Algorithms Beyond SG Frank E. Curtis 1, Lehigh University involving joint work with Léon Bottou, Facebook AI Research Jorge Nocedal, Northwestern University Optimization Methods
Stochastic Optimization Algorithms Beyond SG Frank E. Curtis 1, Lehigh University involving joint work with Léon Bottou, Facebook AI Research Jorge Nocedal, Northwestern University Optimization Methods
Optimization methods
 Lecture notes 3 February 8, 016 1 Introduction Optimization methods In these notes we provide an overview of a selection of optimization methods. We focus on methods which rely on first-order information,
Lecture notes 3 February 8, 016 1 Introduction Optimization methods In these notes we provide an overview of a selection of optimization methods. We focus on methods which rely on first-order information,
Lecture 23: November 21
 10-725/36-725: Convex Optimization Fall 2016 Lecturer: Ryan Tibshirani Lecture 23: November 21 Scribes: Yifan Sun, Ananya Kumar, Xin Lu Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
10-725/36-725: Convex Optimization Fall 2016 Lecturer: Ryan Tibshirani Lecture 23: November 21 Scribes: Yifan Sun, Ananya Kumar, Xin Lu Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
10. Unconstrained minimization
 Convex Optimization Boyd & Vandenberghe 10. Unconstrained minimization terminology and assumptions gradient descent method steepest descent method Newton s method self-concordant functions implementation
Convex Optimization Boyd & Vandenberghe 10. Unconstrained minimization terminology and assumptions gradient descent method steepest descent method Newton s method self-concordant functions implementation
Lecture 25: November 27
 10-725: Optimization Fall 2012 Lecture 25: November 27 Lecturer: Ryan Tibshirani Scribes: Matt Wytock, Supreeth Achar Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
10-725: Optimization Fall 2012 Lecture 25: November 27 Lecturer: Ryan Tibshirani Scribes: Matt Wytock, Supreeth Achar Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
Descent methods. min x. f(x)
") Gradient Descent Descent methods min x f(x) 5 / 34 Descent methods min x f(x) x k x k+1... x f(x ) = 0 5 / 34 Gradient methods Unconstrained optimization min f(x) x R n. 6 / 34 Gradient methods Unconstrained
Gradient Descent Descent methods min x f(x) 5 / 34 Descent methods min x f(x) x k x k+1... x f(x ) = 0 5 / 34 Gradient methods Unconstrained optimization min f(x) x R n. 6 / 34 Gradient methods Unconstrained
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725 Consider Last time: proximal Newton method min x g(x) + h(x) where g, h convex, g twice differentiable, and h simple. Proximal
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725 Consider Last time: proximal Newton method min x g(x) + h(x) where g, h convex, g twice differentiable, and h simple. Proximal
Lecture 1: September 25
 0-725: Optimization Fall 202 Lecture : September 25 Lecturer: Geoff Gordon/Ryan Tibshirani Scribes: Subhodeep Moitra Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
0-725: Optimization Fall 202 Lecture : September 25 Lecturer: Geoff Gordon/Ryan Tibshirani Scribes: Subhodeep Moitra Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
Lecture 8: February 9
 0-725/36-725: Convex Optimiation Spring 205 Lecturer: Ryan Tibshirani Lecture 8: February 9 Scribes: Kartikeya Bhardwaj, Sangwon Hyun, Irina Caan 8 Proximal Gradient Descent In the previous lecture, we
0-725/36-725: Convex Optimiation Spring 205 Lecturer: Ryan Tibshirani Lecture 8: February 9 Scribes: Kartikeya Bhardwaj, Sangwon Hyun, Irina Caan 8 Proximal Gradient Descent In the previous lecture, we
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 3. Gradient Method
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Quasi-Newton Methods. Javier Peña Convex Optimization /36-725
 Quasi-Newton Methods Javier Peña Convex Optimization 10-725/36-725 Last time: primal-dual interior-point methods Consider the problem min x subject to f(x) Ax = b h(x) 0 Assume f, h 1,..., h m are convex
Quasi-Newton Methods Javier Peña Convex Optimization 10-725/36-725 Last time: primal-dual interior-point methods Consider the problem min x subject to f(x) Ax = b h(x) 0 Assume f, h 1,..., h m are convex
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization /36-725
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Gradient Descent. Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh. Convex Optimization /36-725
 Gradient Descent Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh Convex Optimization 10-725/36-725 Based on slides from Vandenberghe, Tibshirani Gradient Descent Consider unconstrained, smooth convex
Gradient Descent Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh Convex Optimization 10-725/36-725 Based on slides from Vandenberghe, Tibshirani Gradient Descent Consider unconstrained, smooth convex
Efficient Quasi-Newton Proximal Method for Large Scale Sparse Optimization
 Efficient Quasi-Newton Proximal Method for Large Scale Sparse Optimization Xiaocheng Tang Department of Industrial and Systems Engineering Lehigh University Bethlehem, PA 18015 xct@lehigh.edu Katya Scheinberg
Efficient Quasi-Newton Proximal Method for Large Scale Sparse Optimization Xiaocheng Tang Department of Industrial and Systems Engineering Lehigh University Bethlehem, PA 18015 xct@lehigh.edu Katya Scheinberg
SIAM Conference on Imaging Science, Bologna, Italy, Adaptive FISTA. Peter Ochs Saarland University
 SIAM Conference on Imaging Science, Bologna, Italy, 2018 Adaptive FISTA Peter Ochs Saarland University 07.06.2018 joint work with Thomas Pock, TU Graz, Austria c 2018 Peter Ochs Adaptive FISTA 1 / 16 Some
SIAM Conference on Imaging Science, Bologna, Italy, 2018 Adaptive FISTA Peter Ochs Saarland University 07.06.2018 joint work with Thomas Pock, TU Graz, Austria c 2018 Peter Ochs Adaptive FISTA 1 / 16 Some
Convex Optimization Lecture 16
 Convex Optimization Lecture 16 Today: Projected Gradient Descent Conditional Gradient Descent Stochastic Gradient Descent Random Coordinate Descent Recall: Gradient Descent (Steepest Descent w.r.t Euclidean
Convex Optimization Lecture 16 Today: Projected Gradient Descent Conditional Gradient Descent Stochastic Gradient Descent Random Coordinate Descent Recall: Gradient Descent (Steepest Descent w.r.t Euclidean
Lecture 5: September 15
 10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 15 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Di Jin, Mengdi Wang, Bin Deng Note: LaTeX template courtesy of UC Berkeley EECS
10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 15 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Di Jin, Mengdi Wang, Bin Deng Note: LaTeX template courtesy of UC Berkeley EECS
ORIE 6326: Convex Optimization. Quasi-Newton Methods
 ORIE 6326: Convex Optimization Quasi-Newton Methods Professor Udell Operations Research and Information Engineering Cornell April 10, 2017 Slides on steepest descent and analysis of Newton s method adapted
ORIE 6326: Convex Optimization Quasi-Newton Methods Professor Udell Operations Research and Information Engineering Cornell April 10, 2017 Slides on steepest descent and analysis of Newton s method adapted
This can be 2 lectures! still need: Examples: non-convex problems applications for matrix factorization
 This can be 2 lectures! still need: Examples: non-convex problems applications for matrix factorization x = prox_f(x)+prox_{f^*}(x) use to get prox of norms! PROXIMAL METHODS WHY PROXIMAL METHODS Smooth
This can be 2 lectures! still need: Examples: non-convex problems applications for matrix factorization x = prox_f(x)+prox_{f^*}(x) use to get prox of norms! PROXIMAL METHODS WHY PROXIMAL METHODS Smooth
Lecture 14: Newton s Method
 10-725/36-725: Conve Optimization Fall 2016 Lecturer: Javier Pena Lecture 14: Newton s ethod Scribes: Varun Joshi, Xuan Li Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes
10-725/36-725: Conve Optimization Fall 2016 Lecturer: Javier Pena Lecture 14: Newton s ethod Scribes: Varun Joshi, Xuan Li Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes
Unconstrained minimization of smooth functions
 Unconstrained minimization of smooth functions We want to solve min x R N f(x), where f is convex. In this section, we will assume that f is differentiable (so its gradient exists at every point), and
Unconstrained minimization of smooth functions We want to solve min x R N f(x), where f is convex. In this section, we will assume that f is differentiable (so its gradient exists at every point), and
Big & Quic: Sparse Inverse Covariance Estimation for a Million Variables
 for a Million Variables Cho-Jui Hsieh The University of Texas at Austin NIPS Lake Tahoe, Nevada Dec 8, 2013 Joint work with M. Sustik, I. Dhillon, P. Ravikumar and R. Poldrack FMRI Brain Analysis Goal:
for a Million Variables Cho-Jui Hsieh The University of Texas at Austin NIPS Lake Tahoe, Nevada Dec 8, 2013 Joint work with M. Sustik, I. Dhillon, P. Ravikumar and R. Poldrack FMRI Brain Analysis Goal:
Sub-Sampled Newton Methods
 Sub-Sampled Newton Methods F. Roosta-Khorasani and M. W. Mahoney ICSI and Dept of Statistics, UC Berkeley February 2016 F. Roosta-Khorasani and M. W. Mahoney (UCB) Sub-Sampled Newton Methods Feb 2016 1
Sub-Sampled Newton Methods F. Roosta-Khorasani and M. W. Mahoney ICSI and Dept of Statistics, UC Berkeley February 2016 F. Roosta-Khorasani and M. W. Mahoney (UCB) Sub-Sampled Newton Methods Feb 2016 1
Homework 5. Convex Optimization /36-725
 Homework 5 Convex Optimization 10-725/36-725 Due Tuesday November 22 at 5:30pm submitted to Christoph Dann in Gates 8013 (Remember to a submit separate writeup for each problem, with your name at the top)
Homework 5 Convex Optimization 10-725/36-725 Due Tuesday November 22 at 5:30pm submitted to Christoph Dann in Gates 8013 (Remember to a submit separate writeup for each problem, with your name at the top)
Subgradient Method. Guest Lecturer: Fatma Kilinc-Karzan. Instructors: Pradeep Ravikumar, Aarti Singh Convex Optimization /36-725
 Subgradient Method Guest Lecturer: Fatma Kilinc-Karzan Instructors: Pradeep Ravikumar, Aarti Singh Convex Optimization 10-725/36-725 Adapted from slides from Ryan Tibshirani Consider the problem Recall:
Subgradient Method Guest Lecturer: Fatma Kilinc-Karzan Instructors: Pradeep Ravikumar, Aarti Singh Convex Optimization 10-725/36-725 Adapted from slides from Ryan Tibshirani Consider the problem Recall:
Master 2 MathBigData. 3 novembre CMAP - Ecole Polytechnique
 Master 2 MathBigData S. Gaïffas 1 3 novembre 2014 1 CMAP - Ecole Polytechnique 1 Supervised learning recap Introduction Loss functions, linearity 2 Penalization Introduction Ridge Sparsity Lasso 3 Some
Master 2 MathBigData S. Gaïffas 1 3 novembre 2014 1 CMAP - Ecole Polytechnique 1 Supervised learning recap Introduction Loss functions, linearity 2 Penalization Introduction Ridge Sparsity Lasso 3 Some
5 Quasi-Newton Methods
 Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
r=1 r=1 argmin Q Jt (20) After computing the descent direction d Jt 2 dt H t d + P (x + d) d i = 0, i / J
 After computing the descent direction d Jt 2 dt H t d + P (x + d) d i = 0, i / J") 7 Appendix 7. Proof of Theorem Proof. There are two main difficulties in proving the convergence of our algorithm, and none of them is addressed in previous works. First, the Hessian matrix H is a block-structured
7 Appendix 7. Proof of Theorem Proof. There are two main difficulties in proving the convergence of our algorithm, and none of them is addressed in previous works. First, the Hessian matrix H is a block-structured
Convex Optimization. Newton s method. ENSAE: Optimisation 1/44
 Convex Optimization Newton s method ENSAE: Optimisation 1/44 Unconstrained minimization minimize f(x) f convex, twice continuously differentiable (hence dom f open) we assume optimal value p = inf x f(x)
Convex Optimization Newton s method ENSAE: Optimisation 1/44 Unconstrained minimization minimize f(x) f convex, twice continuously differentiable (hence dom f open) we assume optimal value p = inf x f(x)
Accelerated Block-Coordinate Relaxation for Regularized Optimization
 Accelerated Block-Coordinate Relaxation for Regularized Optimization Stephen J. Wright Computer Sciences University of Wisconsin, Madison October 09, 2012 Problem descriptions Consider where f is smooth
Accelerated Block-Coordinate Relaxation for Regularized Optimization Stephen J. Wright Computer Sciences University of Wisconsin, Madison October 09, 2012 Problem descriptions Consider where f is smooth
6. Proximal gradient method
 L. Vandenberghe EE236C (Spring 2013-14) 6. Proximal gradient method motivation proximal mapping proximal gradient method with fixed step size proximal gradient method with line search 6-1 Proximal mapping
L. Vandenberghe EE236C (Spring 2013-14) 6. Proximal gradient method motivation proximal mapping proximal gradient method with fixed step size proximal gradient method with line search 6-1 Proximal mapping
Adaptive Restarting for First Order Optimization Methods
 Adaptive Restarting for First Order Optimization Methods Nesterov method for smooth convex optimization adpative restarting schemes step-size insensitivity extension to non-smooth optimization continuation
Adaptive Restarting for First Order Optimization Methods Nesterov method for smooth convex optimization adpative restarting schemes step-size insensitivity extension to non-smooth optimization continuation
Subgradient Method. Ryan Tibshirani Convex Optimization
 Subgradient Method Ryan Tibshirani Convex Optimization 10-725 Consider the problem Last last time: gradient descent min x f(x) for f convex and differentiable, dom(f) = R n. Gradient descent: choose initial
Subgradient Method Ryan Tibshirani Convex Optimization 10-725 Consider the problem Last last time: gradient descent min x f(x) for f convex and differentiable, dom(f) = R n. Gradient descent: choose initial
Unconstrained minimization
 CSCI5254: Convex Optimization & Its Applications Unconstrained minimization terminology and assumptions gradient descent method steepest descent method Newton s method self-concordant functions 1 Unconstrained
CSCI5254: Convex Optimization & Its Applications Unconstrained minimization terminology and assumptions gradient descent method steepest descent method Newton s method self-concordant functions 1 Unconstrained
Coordinate Descent and Ascent Methods
 Coordinate Descent and Ascent Methods Julie Nutini Machine Learning Reading Group November 3 rd, 2015 1 / 22 Projected-Gradient Methods Motivation Rewrite non-smooth problem as smooth constrained problem:
Coordinate Descent and Ascent Methods Julie Nutini Machine Learning Reading Group November 3 rd, 2015 1 / 22 Projected-Gradient Methods Motivation Rewrite non-smooth problem as smooth constrained problem:
Minimizing Finite Sums with the Stochastic Average Gradient Algorithm
 Minimizing Finite Sums with the Stochastic Average Gradient Algorithm Joint work with Nicolas Le Roux and Francis Bach University of British Columbia Context: Machine Learning for Big Data Large-scale
Minimizing Finite Sums with the Stochastic Average Gradient Algorithm Joint work with Nicolas Le Roux and Francis Bach University of British Columbia Context: Machine Learning for Big Data Large-scale
CPSC 540: Machine Learning
 CPSC 540: Machine Learning First-Order Methods, L1-Regularization, Coordinate Descent Winter 2016 Some images from this lecture are taken from Google Image Search. Admin Room: We ll count final numbers
CPSC 540: Machine Learning First-Order Methods, L1-Regularization, Coordinate Descent Winter 2016 Some images from this lecture are taken from Google Image Search. Admin Room: We ll count final numbers
Primal-dual coordinate descent
 Primal-dual coordinate descent Olivier Fercoq Joint work with P. Bianchi & W. Hachem 15 July 2015 1/28 Minimize the convex function f, g, h convex f is differentiable Problem min f (x) + g(x) + h(mx) x
Primal-dual coordinate descent Olivier Fercoq Joint work with P. Bianchi & W. Hachem 15 July 2015 1/28 Minimize the convex function f, g, h convex f is differentiable Problem min f (x) + g(x) + h(mx) x
Lasso: Algorithms and Extensions
 ELE 538B: Sparsity, Structure and Inference Lasso: Algorithms and Extensions Yuxin Chen Princeton University, Spring 2017 Outline Proximal operators Proximal gradient methods for lasso and its extensions
ELE 538B: Sparsity, Structure and Inference Lasso: Algorithms and Extensions Yuxin Chen Princeton University, Spring 2017 Outline Proximal operators Proximal gradient methods for lasso and its extensions
Convex Optimization and l 1 -minimization
 Convex Optimization and l 1 -minimization Sangwoon Yun Computational Sciences Korea Institute for Advanced Study December 11, 2009 2009 NIMS Thematic Winter School Outline I. Convex Optimization II. l
Convex Optimization and l 1 -minimization Sangwoon Yun Computational Sciences Korea Institute for Advanced Study December 11, 2009 2009 NIMS Thematic Winter School Outline I. Convex Optimization II. l
Sparse Inverse Covariance Estimation for a Million Variables
 Sparse Inverse Covariance Estimation for a Million Variables Inderjit S. Dhillon Depts of Computer Science & Mathematics The University of Texas at Austin SAMSI LDHD Opening Workshop Raleigh, North Carolina
Sparse Inverse Covariance Estimation for a Million Variables Inderjit S. Dhillon Depts of Computer Science & Mathematics The University of Texas at Austin SAMSI LDHD Opening Workshop Raleigh, North Carolina
The Randomized Newton Method for Convex Optimization
 The Randomized Newton Method for Convex Optimization Vaden Masrani UBC MLRG April 3rd, 2018 Introduction We have some unconstrained, twice-differentiable convex function f : R d R that we want to minimize:
The Randomized Newton Method for Convex Optimization Vaden Masrani UBC MLRG April 3rd, 2018 Introduction We have some unconstrained, twice-differentiable convex function f : R d R that we want to minimize:
CPSC 540: Machine Learning
 CPSC 540: Machine Learning Gradient Descent, Newton-like Methods Mark Schmidt University of British Columbia Winter 2017 Admin Auditting/registration forms: Submit them in class/help-session/tutorial this
CPSC 540: Machine Learning Gradient Descent, Newton-like Methods Mark Schmidt University of British Columbia Winter 2017 Admin Auditting/registration forms: Submit them in class/help-session/tutorial this
Newton-Like Methods for Sparse Inverse Covariance Estimation
 Newton-Like Methods for Sparse Inverse Covariance Estimation Peder A. Olsen Figen Oztoprak Jorge Nocedal Stephen J. Rennie June 7, 2012 Abstract We propose two classes of second-order optimization methods
Newton-Like Methods for Sparse Inverse Covariance Estimation Peder A. Olsen Figen Oztoprak Jorge Nocedal Stephen J. Rennie June 7, 2012 Abstract We propose two classes of second-order optimization methods
Nonlinear Optimization Methods for Machine Learning
 Nonlinear Optimization Methods for Machine Learning Jorge Nocedal Northwestern University University of California, Davis, Sept 2018 1 Introduction We don t really know, do we? a) Deep neural networks
Nonlinear Optimization Methods for Machine Learning Jorge Nocedal Northwestern University University of California, Davis, Sept 2018 1 Introduction We don t really know, do we? a) Deep neural networks
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Coordinate Descent. Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh. Convex Optimization / Slides adapted from Tibshirani
 Coordinate Descent Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh Convex Optimization 10-725/36-725 Slides adapted from Tibshirani Coordinate descent We ve seen some pretty sophisticated methods
Coordinate Descent Lecturer: Pradeep Ravikumar Co-instructor: Aarti Singh Convex Optimization 10-725/36-725 Slides adapted from Tibshirani Coordinate descent We ve seen some pretty sophisticated methods
Primal-dual coordinate descent A Coordinate Descent Primal-Dual Algorithm with Large Step Size and Possibly Non-Separable Functions
 Primal-dual coordinate descent A Coordinate Descent Primal-Dual Algorithm with Large Step Size and Possibly Non-Separable Functions Olivier Fercoq and Pascal Bianchi Problem Minimize the convex function
Primal-dual coordinate descent A Coordinate Descent Primal-Dual Algorithm with Large Step Size and Possibly Non-Separable Functions Olivier Fercoq and Pascal Bianchi Problem Minimize the convex function
1 Newton s Method. Suppose we want to solve: x R. At x = x, f (x) can be approximated by:
 can be approximated by:") Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
10-725/36-725: Convex Optimization Prerequisite Topics
 10-725/36-725: Convex Optimization Prerequisite Topics February 3, 2015 This is meant to be a brief, informal refresher of some topics that will form building blocks in this course. The content of the
10-725/36-725: Convex Optimization Prerequisite Topics February 3, 2015 This is meant to be a brief, informal refresher of some topics that will form building blocks in this course. The content of the
Fast proximal gradient methods
 L. Vandenberghe EE236C (Spring 2013-14) Fast proximal gradient methods fast proximal gradient method (FISTA) FISTA with line search FISTA as descent method Nesterov s second method 1 Fast (proximal) gradient
L. Vandenberghe EE236C (Spring 2013-14) Fast proximal gradient methods fast proximal gradient method (FISTA) FISTA with line search FISTA as descent method Nesterov s second method 1 Fast (proximal) gradient
6. Proximal gradient method
 L. Vandenberghe EE236C (Spring 2016) 6. Proximal gradient method motivation proximal mapping proximal gradient method with fixed step size proximal gradient method with line search 6-1 Proximal mapping
L. Vandenberghe EE236C (Spring 2016) 6. Proximal gradient method motivation proximal mapping proximal gradient method with fixed step size proximal gradient method with line search 6-1 Proximal mapping
Block Coordinate Descent for Regularized Multi-convex Optimization
 Block Coordinate Descent for Regularized Multi-convex Optimization Yangyang Xu and Wotao Yin CAAM Department, Rice University February 15, 2013 Multi-convex optimization Model definition Applications Outline
Block Coordinate Descent for Regularized Multi-convex Optimization Yangyang Xu and Wotao Yin CAAM Department, Rice University February 15, 2013 Multi-convex optimization Model definition Applications Outline
Geometric Descent Method for Convex Composite Minimization
 Geometric Descent Method for Convex Composite Minimization Shixiang Chen 1, Shiqian Ma 1, and Wei Liu 2 1 Department of SEEM, The Chinese University of Hong Kong, Hong Kong 2 Tencent AI Lab, Shenzhen,
Geometric Descent Method for Convex Composite Minimization Shixiang Chen 1, Shiqian Ma 1, and Wei Liu 2 1 Department of SEEM, The Chinese University of Hong Kong, Hong Kong 2 Tencent AI Lab, Shenzhen,
Accelerated Proximal Gradient Methods for Convex Optimization
 Accelerated Proximal Gradient Methods for Convex Optimization Paul Tseng Mathematics, University of Washington Seattle MOPTA, University of Guelph August 18, 2008 ACCELERATED PROXIMAL GRADIENT METHODS
Accelerated Proximal Gradient Methods for Convex Optimization Paul Tseng Mathematics, University of Washington Seattle MOPTA, University of Guelph August 18, 2008 ACCELERATED PROXIMAL GRADIENT METHODS
Sparsity Regularization
 Sparsity Regularization Bangti Jin Course Inverse Problems & Imaging 1 / 41 Outline 1 Motivation: sparsity? 2 Mathematical preliminaries 3 l 1 solvers 2 / 41 problem setup finite-dimensional formulation
Sparsity Regularization Bangti Jin Course Inverse Problems & Imaging 1 / 41 Outline 1 Motivation: sparsity? 2 Mathematical preliminaries 3 l 1 solvers 2 / 41 problem setup finite-dimensional formulation
An efficient ADMM algorithm for high dimensional precision matrix estimation via penalized quadratic loss
 An efficient ADMM algorithm for high dimensional precision matrix estimation via penalized quadratic loss arxiv:1811.04545v1 [stat.co] 12 Nov 2018 Cheng Wang School of Mathematical Sciences, Shanghai Jiao
An efficient ADMM algorithm for high dimensional precision matrix estimation via penalized quadratic loss arxiv:1811.04545v1 [stat.co] 12 Nov 2018 Cheng Wang School of Mathematical Sciences, Shanghai Jiao
Variables. Cho-Jui Hsieh The University of Texas at Austin. ICML workshop on Covariance Selection Beijing, China June 26, 2014
 for a Million Variables Cho-Jui Hsieh The University of Texas at Austin ICML workshop on Covariance Selection Beijing, China June 26, 2014 Joint work with M. Sustik, I. Dhillon, P. Ravikumar, R. Poldrack,
for a Million Variables Cho-Jui Hsieh The University of Texas at Austin ICML workshop on Covariance Selection Beijing, China June 26, 2014 Joint work with M. Sustik, I. Dhillon, P. Ravikumar, R. Poldrack,
Large-scale Stochastic Optimization
 Large-scale Stochastic Optimization 11-741/641/441 (Spring 2016) Hanxiao Liu hanxiaol@cs.cmu.edu March 24, 2016 1 / 22 Outline 1. Gradient Descent (GD) 2. Stochastic Gradient Descent (SGD) Formulation
Large-scale Stochastic Optimization 11-741/641/441 (Spring 2016) Hanxiao Liu hanxiaol@cs.cmu.edu March 24, 2016 1 / 22 Outline 1. Gradient Descent (GD) 2. Stochastic Gradient Descent (SGD) Formulation
Linearly-Convergent Stochastic-Gradient Methods
 Linearly-Convergent Stochastic-Gradient Methods Joint work with Francis Bach, Michael Friedlander, Nicolas Le Roux INRIA - SIERRA Project - Team Laboratoire d Informatique de l École Normale Supérieure
Linearly-Convergent Stochastic-Gradient Methods Joint work with Francis Bach, Michael Friedlander, Nicolas Le Roux INRIA - SIERRA Project - Team Laboratoire d Informatique de l École Normale Supérieure
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
A second order primal-dual algorithm for nonsmooth convex composite optimization
 2017 IEEE 56th Annual Conference on Decision and Control (CDC) December 12-15, 2017, Melbourne, Australia A second order primal-dual algorithm for nonsmooth convex composite optimization Neil K. Dhingra,
2017 IEEE 56th Annual Conference on Decision and Control (CDC) December 12-15, 2017, Melbourne, Australia A second order primal-dual algorithm for nonsmooth convex composite optimization Neil K. Dhingra,
Truncated Newton Method
 Truncated Newton Method approximate Newton methods truncated Newton methods truncated Newton interior-point methods EE364b, Stanford University minimize convex f : R n R Newton s method Newton step x nt
Truncated Newton Method approximate Newton methods truncated Newton methods truncated Newton interior-point methods EE364b, Stanford University minimize convex f : R n R Newton s method Newton step x nt
Lecture 15 Newton Method and Self-Concordance. October 23, 2008
 Newton Method and Self-Concordance October 23, 2008 Outline Lecture 15 Self-concordance Notion Self-concordant Functions Operations Preserving Self-concordance Properties of Self-concordant Functions Implications
Newton Method and Self-Concordance October 23, 2008 Outline Lecture 15 Self-concordance Notion Self-concordant Functions Operations Preserving Self-concordance Properties of Self-concordant Functions Implications
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Uses of duality. Geoff Gordon & Ryan Tibshirani Optimization /
 Uses of duality Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725 1 Remember conjugate functions Given f : R n R, the function is called its conjugate f (y) = max x R n yt x f(x) Conjugates appear
Uses of duality Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725 1 Remember conjugate functions Given f : R n R, the function is called its conjugate f (y) = max x R n yt x f(x) Conjugates appear
Lecture 7 Unconstrained nonlinear programming
 Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Sparse Gaussian conditional random fields
 Sparse Gaussian conditional random fields Matt Wytock, J. ico Kolter School of Computer Science Carnegie Mellon University Pittsburgh, PA 53 {mwytock, zkolter}@cs.cmu.edu Abstract We propose sparse Gaussian
Sparse Gaussian conditional random fields Matt Wytock, J. ico Kolter School of Computer Science Carnegie Mellon University Pittsburgh, PA 53 {mwytock, zkolter}@cs.cmu.edu Abstract We propose sparse Gaussian
ARock: an algorithmic framework for asynchronous parallel coordinate updates
 ARock: an algorithmic framework for asynchronous parallel coordinate updates Zhimin Peng, Yangyang Xu, Ming Yan, Wotao Yin ( UCLA Math, U.Waterloo DCO) UCLA CAM Report 15-37 ShanghaiTech SSDS 15 June 25,
ARock: an algorithmic framework for asynchronous parallel coordinate updates Zhimin Peng, Yangyang Xu, Ming Yan, Wotao Yin ( UCLA Math, U.Waterloo DCO) UCLA CAM Report 15-37 ShanghaiTech SSDS 15 June 25,
Math 273a: Optimization Netwon s methods
 Math 273a: Optimization Netwon s methods Instructor: Wotao Yin Department of Mathematics, UCLA Fall 2015 some material taken from Chong-Zak, 4th Ed. Main features of Newton s method Uses both first derivatives
Math 273a: Optimization Netwon s methods Instructor: Wotao Yin Department of Mathematics, UCLA Fall 2015 some material taken from Chong-Zak, 4th Ed. Main features of Newton s method Uses both first derivatives
E5295/5B5749 Convex optimization with engineering applications. Lecture 8. Smooth convex unconstrained and equality-constrained minimization
 E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
Unconstrained minimization: assumptions
 Unconstrained minimization I terminology and assumptions I gradient descent method I steepest descent method I Newton s method I self-concordant functions I implementation IOE 611: Nonlinear Programming,
Unconstrained minimization I terminology and assumptions I gradient descent method I steepest descent method I Newton s method I self-concordant functions I implementation IOE 611: Nonlinear Programming,
arxiv: v1 [math.oc] 1 Jul 2016
![arxiv: v1 [math.oc] 1 Jul 2016](/thumbs/78/78221552.jpg "arxiv: v1 [math.oc] 1 Jul 2016") Convergence Rate of Frank-Wolfe for Non-Convex Objectives Simon Lacoste-Julien INRIA - SIERRA team ENS, Paris June 8, 016 Abstract arxiv:1607.00345v1 [math.oc] 1 Jul 016 We give a simple proof that the
Convergence Rate of Frank-Wolfe for Non-Convex Objectives Simon Lacoste-Julien INRIA - SIERRA team ENS, Paris June 8, 016 Abstract arxiv:1607.00345v1 [math.oc] 1 Jul 016 We give a simple proof that the
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428