The construction and use of a phase diagram to investigate the properties of a dynamic system
|
|
|
- Leon Flowers
- 5 years ago
- Views:
Transcription
1 File: Phase.doc/pdf The construction and use of a phase diagram to investigate the properties of a dynamic system 1. Introduction Many economic or biological-economic models can be represented as dynamic systems of differential equations and associated measurement equations. The differential equations contain information about the equilibrium (or equilibria) of the system being investigated, the stability properties of that equilibrium, and the dynamics of the adjustment processes implicit in that system. Both this equilibrium and dynamic adjustment information can be compactly represented in a visual way by means of a phase diagram of the system. In this document, the construction and interpretation of phase diagrams is explained. The computer package Maple is used to construct two example of a phase diagram. Although it will be convenient for you to have access to Maple and to replicate these example yourself, that is not necessary for what follows. If you do not have access to Maple, a Word document copy of each of the Maple files is available from the Additional Materials pages. Moreover, in some simple cases at least, it should be possible for you to construct an approximation to an actual phase diagram using pen, paper and a little bit of simple algebra. The first example we shall use is the simple open access fishery model examined in the text of Chapter 17. The bioeconomic system in question is laid out in Table 17.8, Appendix 17.1, of the main text. You should look at the column labelled Continuous-time model. Of the two equations at the foot of the table under the heading FISHERY EFFORT DYNAMICS, it is the former the open-access entry rule which is applicable in this case. For convenience, we lay out the equations from that table which are relevant for our present purposes in Table 1 below. There are some minor changes in notation from Table 17.8 which should require no further explanation. 1
2 Table 1 The continuous-time version of the open access fishery model (with assumed functional forms) Fishery production function (1) H = ees Net (of harvest) growth of fish stock ds S (2) G(S) g 1 S S - H MAX Fishery profit (3) NB = B - C = PeES we Open access entry rule (4) de = (NB) Substituting equation (1) into equation (2), and equation (3) into equation (4), we obtain the following dynamic system consisting of two differential equations. ds S gs 1- ees S (5) MAX de δ PeES we (6) Note two points: Equations (5) and (6) are two differential equations in two variables, stock (S) and effort (E). All other terms in the two differential equations are parameters, baseline values of which are specified in the text. The two (implicit) measurement equations are H = ees (defining the fishery harvest) and NB = B - C = PeES we (defining the industry s net benefit, or profit). These allow us to compute the values of associated variables of interest once the solution values for S and E have been obtained. 2
3 2. Equilibrium solution The variable S will be in equilibrium for all combinations of S and E which satisfy ds/ = 0 in equation (5). That is, when S 0 gs 1- ees S (7) MAX By rearranging (7) to give S as a function of E, this yields SMAX(g ee) S (8) g The variable E will be in equilibrium for all combinations of S and E which satisfy de/ = 0 in equation (6). That is, when 0 δ PeES we (9) which written again in the form of S as a function of E - can be simplified to w S (10) Pe An equilibrium solution for the dynamic system given by Equations (5) and (6) consists of a pair of values for S and E at which the rates of change of S and E over time are simultaneously zero (i.e. ds/ = 0 and de/ = 0). That is, a solution will be one in which equations (7) and (9) hold together. To obtain a numerical solution, particular parameter values are required. With our baseline parameter values g0.15 S MAX 1 e0.015 P w0.6 the two equations that must be satisfied simultaneously are : S 1 0.1E (11) which follows from ds S (g ee) 0 S MAX g and 3
4 S 0.2 (12) which follows from de 0 S w Pe Solving (11) and (12) together gives S* = 0.2 and E* = 8. These two equilibrium relationships can be expressed graphically as shown in Figure 1 (which corresponds to Figure 17.6 in the textbook). Figure 1 ds S 0 S MAX (g ee) g S 1 0.1E de 0 S w Pe S 0.2 S* E* 4
5 3. System behaviour out of equilibrium We next attempt to establish the dynamic paths of E and S whenever {E t, S t } {E*, S*}. To do so, we consider the following questions: In which direction does E move when E is not in equilibrium? In which direction does S move when S is not in equilibrium? Combining the information from the answers to these two questions gives us qualitative information about the dynamic behaviour of the system when out of equilibrium. In which direction does E move when E is not in equilibrium? From Equation (6) it can be seen that if S > 0.2 then de/ > 0. 1 Hence any point on the phase diagram above the line S = 0.2 must be one in which de/ is positive, and so E is increasing over time. Conversely, if S < 0.2 then de/ < 0. Hence any point on the phase diagram below the line S = 0.2 must be one in which de/ is negative, and so E is decreasing over time. This reasoning divides the space on the phase plan diagram into two sub-spaces, with E increasing in one and falling in the other. In which direction does S move when S is not in equilibrium? From Equation (5) it can be seen that if S > (1-0.1E) then ds/ < 0. 2 Hence any point on the phase diagram to the right of the line S = 1-0.1E must be one in which ds/ is negative, and so S is decreasing over time. Conversely, if S < (1-0.1E) then ds/ > 0. Hence any point on the phase diagram to the left of the line S = 1-0.1E must be one in which ds/ is 1 Take Equation (6) and divide both sides by E. Then substitute in parameter values for P, e de ( ) and w on the right-hand side. Simplifying the resulting expression gives 20S 4. E Hence if (20S 4) > 0, then (de/)/e >0. But then dividing each of these inequalities by 20, it follows that if (S 0.2) > 0 then (de/)/20e > 0, which in turn implies that de/ > 0. 2 Take Equation (5) and divide both sides by S. Then substitute in parameter values for g, e and S MAX on the right-hand side. Simplifying the resulting expression gives ds ( ) 0.15(1 S) 0.015E. You should be able to deduce the necessary inequalities from S this result. 5
6 positive, and so S is rising over time. This reasoning also divides the space on the phase plan diagram into two sub-spaces, with S increasing in one and falling in the other. This information is put together in Figure 2. The diagram is effectively divided into four quadrants by the two equilibrium lines. In each quadrant is a direction indicator shown by two combined arrows, one pointing horizontally and the other vertically. For example in the quadrant above the S = 0.2 line and to the left of the S = 1 0.1E line the direction indicator is shown by the symbol The directions of each of the arrowheads show the movement of E and S. Specifically, E (the variable on the horizontal axis) is rising, and S (the variable on the vertical axis) is also rising. At different points in the space spanned by this quadrant the relative magnitudes of the forces changing E and S will differ. For example, it can be calculated from the two equations (5) and (6) (although this is not done so here) that at a point towards the bottom right of this quadrant such as the point {E, S} = {2, 0.25} that the absolute size of the upward movement of S is greater than the size of the increase in E. So, if the direction indicator at that point was drawn to a correct (relative) scale it would resemble and the vector of combined forces would be represented by the dashed line below In fact, we could calculate the dotted arrow vector of combined forces for every point on the space of the diagram. Figure 3 (identical to Figure 17.6: Phase-plane analysis of stock and effort dynamic paths for the illustrative model in the text) shows what this would look like (but using red solid rather than dashed arrows). Figure 3 has been obtained by using the 6
7 Maple package. The required code is shown in Chapter17.mw (and is copied in a Word file as Chapter17mw.doc). Figure 2 ds S 0 S MAX (g ee) g S 1 0.1E de 0 S w Pe S 0.2 7
8 Finally, note that Figure 3 (or equivalently Figure 17.6) shows one particular trajectory as a blue line. This line describes the dynamic adjustment process for the system from an initial point at which S is just below 1 and E is just larger than zero. The adjustment path through time is shown by the curved blue line. We begin at the top left point of the curved adjustment path. As time passes, stock falls and effort rises the adjustment path heads south-eastwards. After some time, the stock continues to fall but so too does effort the adjustment path follows a south-west direction. Looking at the path as a whole, we see that it converges through a series of diminishing cycles on the steady state equilibrium. As the main text pointed out, the (open access fishery model) examined here, in conjunction with the particular baselines parameter values being assumed, has strong stability properties: irrespective of where stock and effort happen to be the adjustment paths will lead to the unique steady state equilibrium, albeit through a damped, oscillatory adjustment process. 8

9 Figure 3: Phase plane dynamics of the open access model 9
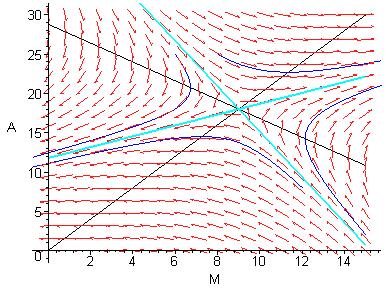
10 4. Dynamics of the Local Stock Pollution Model of Chapter 16. The second example we investigate is the local stock pollution model discussed in Chapter 16. The dynamic system was defined as the two differential equations 16.9 and 16.25a. That is: da = M 0.5A (16.9b) dm = 0.6M 0.5A 14.4 (16.25b) These two equations determine the dynamics of the state variable (A t, the pollution stock) and the instrument or control variable (M t, the flow of emissions). In steady state, variables are unchanging through time, so da/ A =0 and dm/ M =0. Imposing these values, and solving the two resulting equations yields M * = 9 and A * = 18. This steady state solution is shown in the phase plane diagram, Figure 16.5 by the intersection of the two lines labelled A =0 and M =0 (which are here A = 2M and A = (-0.6/0.5)M from 16.9 / and / ). Figure 16.5 is reproduced below for convenience. Next, we establish in which direction A and M will move over time from any pair of initial values {A 0, M 0 }. The two lines A =0 and M =0 (known as isoclines) divide the space into four quadrants. Above the line A =0, A > 2M, decay exceeds emissions flows, and so A is falling. Conversely below the line A =0, A < 2M, decay is less than emissions flows, and so A is rising. These movements are shown by the downward facing directional arrows in the two quadrants labelled a and b, and by upward facing directional arrows in the two quadrants labelled c and d. Above the line M =0, 0.6M > A, and so from Equation 16.25b we see that M is rising. Below the line M =0, 0.6M < A, and so M is falling. These movements are shown by the leftward facing directional arrows in the two quadrants labelled a and d, and by rightward facing directional arrows in the two quadrants labelled b and c. 10
11 Taking these results together we obtain the pairs of direction indicators for movements in A and M for each of the four quadrants when the system is not in steady state. The curved lines illustrate four paths that the variables would take from particular initial values. Thus, for example, if the initial values lie in quadrant d with M = 15 and A = 2, the differential equations which determine A and M would at first cause M to fall and A to rise over time. As this trajectory crosses the M =0 isocline into quadrant c, A will continue to rise but now M will also rise too. Left alone, the system would not reach the steady state optimal solution, diverging ever further from it as time passes. Inspection of the other three trajectories shows that these also fail to attain the steady state optimum, and eventually diverge ever further from it. Inspection of Figure 16.5 shows two other lines, of a kind which we have not come across before. These two dotted lines sometimes called separatrices - both pass through the steady-state equilibrium of the system. One of them known as the stable arm is annotated with arrows which point towards the equilibrium The other known as the unstable arm is annotated with arrows which point away from the equilibrium. Further inspection shows that there are only two paths which lead to the steady state equilibrium. These two paths consist of movements along the stable arm, either in a southeasterly direction or in a north-westerly direction. Now suppose that the policy maker has determined that the steady-state equilibrium is an optimal target. Then, for any dynamic process such as this, the only way of reaching that optimum is for the policy maker to control M so as to reach the stable arm, and then to adjust M appropriately along the stable arm until the optimal point is reached. A system with the dynamic properties shown in Figure 16.5 exhibits what is known as a saddle point equilibrium. 11
12 Figure 16.5 Steady state solution and dynamics of the waste accumulation and disposal model. b A 0 * A 18 a c d M 0 * M 9 12
13 5. A method of calculating the separatrices of the dynamic system How can we obtain the stable and unstable arms of the dynamic system? We will need to make use of a little matrix algebra, and the concepts of eigenvalues and eigenvectors. The first step is to write our two equation differential equation system in the special matrix form of a linear system 3 x Ax b where M x A M x A 0.6 A b 0 For the moment, we ignore the vector of constant terms b. Our next step is to obtain the eigenvalues and eigenvectors of the matrix A. The eigenvalues of A (also known as the characteristic roots of A) are the values of which satisfy the equation det(a - I) = 0 (13) where the symbol det denotes the determinant of the matrix in parentheses which follows it, and I is the identity matrix. The eigenvectors of the matrix are the solutions to (13) for each particular eigenvalue. 4 These can be easily found using a mathematical package. For example, using the following Maple code (in the Maple file Stock pollution 1.mws), we obtain the two eigenvalues of A as r 1 = and r 2 = Corresponding to the eigenvalue r 1 = is the eigenvector v and corresponding to the eigenvalue r 2 = is the eigenvector v The order in which the equations appear is arbitrary. Our results would be identical for the other ordering. 4 For a simple treatment of eigenvectors and eigenvalues, see Chiang (1984), chapter
14 The gradients of these two eigenvectors determine the directions of the two separatrices of the system: the unstable arm (v 1 in this case) and the stable arm (v 2 in this case). These separatrices must pass through the equilibrium (or fixed point of the system at A* = 18 and M* = 9. They are shown in Figure 16.5 as the two dotted blue lines, with the stable (unstable) arm showing arrows pointing to (away from) the fixed point. The eigenvalues of the system determine the nature of the equilibrium of the system. Specifically for a two-equation system, the possibilities include 5 1. If the eigenvalues are real numbers, are distinct, and are of the same sign, then the equilibrium is stable (with both separatrices being stable arms) 2. If the eigenvalues are real numbers, are distinct, and are of opposite signs, then the system has an unstable saddle point equilibrium (with one separatrix being the stable arm and the other the unstable arm) 3. If the eigenvalues are complex numbers, then (depending on the particular values of r 1 and r 2 ) the system will have one of the following properties: a stable equilibrium with the convergence paths spiralling inwards towards the fixed point an unstable equilibrium with dynamic adjustment paths diverging in a spiral manner outwards and away from the fixed point dynamic paths taking the form of closed circles or ellipses (with either clockwise or anticlockwise direction), and so neither converging on nor diverging from the centre of the closed curve. Clearly, in the example of the local stock-pollution model that we have just been investigating, the eigenvalues of A ( r 1 = and r 2 = ) fall into category 2 above, that of an unstable saddle point equilibrium (as we discovered earlier by inspection of the phase diagram for the system). We shall see later in this document that the open access model falls into (the first bullet pointed case of) category 3. 5 See Shone (2002) Chapter 4 for more details and a complete catalogue of all possible forms of equilibria. 14
15 The text below shows the Maple code used to generate the phase plane diagram which underlies Figure The first line defines two ratios of constant numbers (actually ratios of elements of the matrix of eigenvectors) which are used lower down in the code to draw lines representing the two separatrices. Our code rather inelegantly manipulates the locations of the stable and unstable arms so that they not only have the correct directions but also pass through the fixed (equilibrium) point of the system. (See the code beginning lines92.) At the end of the code itself, we have copied the phase plane diagram as it constructed by Maple from this code. > rat1:= / ;rat2:= / ; rat1 := The differential equations defined: rat2 := > eqs92:={diff(m(t),t)=0.5*a(t)+0.6*m(t)-14.4, diff(a(t),t)=m(t)-0.5*a(t)}; d d eqs92 := { M( t) 0.5 A( t) 0.6 M( t) 14.4, A( t) M( t) 0.5 A( t )} >init92:=[[m(0)=8,a(0)=25],[m(0)=12,a(0)=8],[m(0)=6,a(0)=25],[ M(0)=15,A(0)=2]]; init92 := [[ M( 0)8, A( 0) 25 ], [ M( 0)12, A( 0) 8 ], [ M( 0)6, A( 0) 25], [ M( 0)15, A( 0) 2 ]] >curves92:=deplot(eqs92,[m(t),a(t)],t=0..200,m=0..15,a=0..30,i nit92,stepsize=.2,arrows=thin,linecolour=blue,thickness=1): > lines92:=plot({(18-rat2*9)+( / )*m,(18- rat1*9)+( / )*m},m=0..15,a=0..30,colour=cyan, thickness=2): > lines93:=plot({(2*m), ((-0.6/0.5)*M+(14.4/0.5))}, M=0..15,A=0..30,colour=black): > display({curves92,lines93,lines92}); 15
16 16
17 6. Revisiting the open access model Finally, we return to our open access model. The two differential equations of the dynamic system are (see footnotes 1 and 2): ds (0.15(1 S) 0.015E)S de (20S 4)E This is a non-linear differential equation system. We have already seen that it has a fixed point (equilibrium) at (S = S* = 0.2, E = E* = 8). To examine the stability properties of the system near this equilibrium, we need to obtain a linear approximation to the non-linear system around the fixed point. Such an approximation can be obtained using Taylor series expansions. Thus, if we write the system as ds f (S,E) de g(s, E) a linear approximation to the non-linear system around the point (S = S*, E = E*) is given by ds f (S*,E*) f (S*,E*) S* (S S*) (E E*) S E de g(s*,e*) g(s*,e*) E* (S S*) (E E*) S E Then the matrix of coefficients A is formed as (the numerical values of ) the partial derivatives f (S*,E*) A S g(s*,e*) S f (S*,E*) E g(s*,e*) E From this matrix we may proceed as before, obtaining eigenvalues and eigenvectors to establish the system stability properties around the fixed point. The following Maple code obtains the eigenvalues of the linear approximation to this system around the point {S* = 0.2, E* = 8} > taylor((0.15*(1-s)-0.015*e)*s, s=s,2); ( S0.015 e) S ( S0.015 e ) ( ss ) O (( ss ) 2 ) > taylor((0.15*(1-s)-0.015*e)*s, e=e,2); 17
18 ( s0.015 E) s0.015 s ( ee ) > taylor((20*s-4)*e, s=s,2); ( 20 S4) e20 e ( ss ) > taylor((20*s-4)*e, e=e,2); ( 20 s4 ) E ( 20 s4 ) ( ee ) Obtaining numerical values of the partial derivatives: > * *8;-0.015*0.2;20*8;20*0.2-4; We have below labelled the A matrix as beta1: > beta1:=matrix([[-0.03, ], [160, 0]]); := > eigenvalues(beta1); I, I We see that the two eigenvalues are complex numbers of the form r α βi r 1 2 α βi with < 0 and >0. This configuration of roots corresponds to a stable equilibrium, converging (in terms of Figure 3) by means of a damped clockwise spiral to the fixed point equilibrium
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Solutions of a PT-symmetric Dimer with Constant Gain-loss
 Solutions of a PT-symmetric Dimer with Constant Gain-loss G14DIS Mathematics 4th Year Dissertation Spring 2012/2013 School of Mathematical Sciences University of Nottingham John Pickton Supervisor: Dr
Solutions of a PT-symmetric Dimer with Constant Gain-loss G14DIS Mathematics 4th Year Dissertation Spring 2012/2013 School of Mathematical Sciences University of Nottingham John Pickton Supervisor: Dr
15 Two-Dimensional Nonlinear Models
 last revised: 9 October 9 Two-Dimensional Nonlinear Models While we have by no means exhausted the applications of one-dimensional models, we turn in this chapter to two-dimensional nonlinear models. Generically,
last revised: 9 October 9 Two-Dimensional Nonlinear Models While we have by no means exhausted the applications of one-dimensional models, we turn in this chapter to two-dimensional nonlinear models. Generically,
Math 216 Final Exam 24 April, 2017
 Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Basic Concepts. 1.0 renewable, nonrenewable, and environmental resources
 1 Basic Concepts 1.0 renewable, nonrenewable, and environmental resources Economics might be defined as the study of how society allocates scarce resources. The field of resource economics, would then
1 Basic Concepts 1.0 renewable, nonrenewable, and environmental resources Economics might be defined as the study of how society allocates scarce resources. The field of resource economics, would then
College Algebra Through Problem Solving (2018 Edition)
") City University of New York (CUNY) CUNY Academic Works Open Educational Resources Queensborough Community College Winter 1-25-2018 College Algebra Through Problem Solving (2018 Edition) Danielle Cifone
City University of New York (CUNY) CUNY Academic Works Open Educational Resources Queensborough Community College Winter 1-25-2018 College Algebra Through Problem Solving (2018 Edition) Danielle Cifone
ENGI 9420 Lecture Notes 4 - Stability Analysis Page Stability Analysis for Non-linear Ordinary Differential Equations
 ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Chapter 1, Section 1.2, Example 9 (page 13) and Exercise 29 (page 15). Use the Uniqueness Tool. Select the option ẋ = x
 and Exercise 29 (page 15). Use the Uniqueness Tool. Select the option ẋ = x") Use of Tools from Interactive Differential Equations with the texts Fundamentals of Differential Equations, 5th edition and Fundamentals of Differential Equations and Boundary Value Problems, 3rd edition
Use of Tools from Interactive Differential Equations with the texts Fundamentals of Differential Equations, 5th edition and Fundamentals of Differential Equations and Boundary Value Problems, 3rd edition
VECTORS. 3-1 What is Physics? 3-2 Vectors and Scalars CHAPTER
 CHAPTER 3 VECTORS 3-1 What is Physics? Physics deals with a great many quantities that have both size and direction, and it needs a special mathematical language the language of vectors to describe those
CHAPTER 3 VECTORS 3-1 What is Physics? Physics deals with a great many quantities that have both size and direction, and it needs a special mathematical language the language of vectors to describe those
Topic 5: The Difference Equation
 Topic 5: The Difference Equation Yulei Luo Economics, HKU October 30, 2017 Luo, Y. (Economics, HKU) ME October 30, 2017 1 / 42 Discrete-time, Differences, and Difference Equations When time is taken to
Topic 5: The Difference Equation Yulei Luo Economics, HKU October 30, 2017 Luo, Y. (Economics, HKU) ME October 30, 2017 1 / 42 Discrete-time, Differences, and Difference Equations When time is taken to
+ i. cos(t) + 2 sin(t) + c 2.
 + 2 sin(t) + c 2.") MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
Math 331 Homework Assignment Chapter 7 Page 1 of 9
 Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
AJAE appendix for The Gains from Differentiated Policies to Control Stock Pollution when Producers Are Heterogeneous
 AJAE appendix for The Gains from Differentiated Policies to Control Stock Pollution when Producers Are Heterogeneous Àngels Xabadia, Renan U. Goetz, and David Zilberman February 28, 2008 Note: The material
AJAE appendix for The Gains from Differentiated Policies to Control Stock Pollution when Producers Are Heterogeneous Àngels Xabadia, Renan U. Goetz, and David Zilberman February 28, 2008 Note: The material
1.5 Phase Line and Bifurcation Diagrams
 1.5 Phase Line and Bifurcation Diagrams 49 1.5 Phase Line and Bifurcation Diagrams Technical publications may use special diagrams to display qualitative information about the equilibrium points of the
1.5 Phase Line and Bifurcation Diagrams 49 1.5 Phase Line and Bifurcation Diagrams Technical publications may use special diagrams to display qualitative information about the equilibrium points of the
Gerardo Zavala. Math 388. Predator-Prey Models
 Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
Some Notes on Linear Algebra
 Some Notes on Linear Algebra prepared for a first course in differential equations Thomas L Scofield Department of Mathematics and Statistics Calvin College 1998 1 The purpose of these notes is to present
Some Notes on Linear Algebra prepared for a first course in differential equations Thomas L Scofield Department of Mathematics and Statistics Calvin College 1998 1 The purpose of these notes is to present
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Autonomous Systems and Stability
 LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
Competition for resources: complicated dynamics in the simple Tilman model
 DOI 86/s464-5-246-6 ESEACH Open Access Competition for resources: complicated dynamics in the simple Tilman model Joost H J van Opheusden *, Lia Hemerik, Mieke van Opheusden 2 and Wopke van der Werf 2
DOI 86/s464-5-246-6 ESEACH Open Access Competition for resources: complicated dynamics in the simple Tilman model Joost H J van Opheusden *, Lia Hemerik, Mieke van Opheusden 2 and Wopke van der Werf 2
Copyright (c) 2006 Warren Weckesser
 2006 Warren Weckesser") 2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
ENGI Linear Approximation (2) Page Linear Approximation to a System of Non-Linear ODEs (2)
 Page Linear Approximation to a System of Non-Linear ODEs (2)") ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
Problem set 6 Math 207A, Fall 2011 Solutions. 1. A two-dimensional gradient system has the form
 Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
STEP Support Programme. STEP 2 Matrices Topic Notes
 STEP Support Programme STEP 2 Matrices Topic Notes Definitions............................................. 2 Manipulating Matrices...................................... 3 Transformations.........................................
STEP Support Programme STEP 2 Matrices Topic Notes Definitions............................................. 2 Manipulating Matrices...................................... 3 Transformations.........................................
Lecture 1: The Classical Optimal Growth Model
 Lecture 1: The Classical Optimal Growth Model This lecture introduces the classical optimal economic growth problem. Solving the problem will require a dynamic optimisation technique: a simple calculus
Lecture 1: The Classical Optimal Growth Model This lecture introduces the classical optimal economic growth problem. Solving the problem will require a dynamic optimisation technique: a simple calculus
Math Notes on sections 7.8,9.1, and 9.3. Derivation of a solution in the repeated roots case: 3 4 A = 1 1. x =e t : + e t w 2.
 Math 7 Notes on sections 7.8,9., and 9.3. Derivation of a solution in the repeated roots case We consider the eample = A where 3 4 A = The onl eigenvalue is = ; and there is onl one linearl independent
Math 7 Notes on sections 7.8,9., and 9.3. Derivation of a solution in the repeated roots case We consider the eample = A where 3 4 A = The onl eigenvalue is = ; and there is onl one linearl independent
Torsion Spring Oscillator with Dry Friction
 Torsion Spring Oscillator with Dry Friction Manual Eugene Butikov Annotation. The manual includes a description of the simulated physical system and a summary of the relevant theoretical material for students
Torsion Spring Oscillator with Dry Friction Manual Eugene Butikov Annotation. The manual includes a description of the simulated physical system and a summary of the relevant theoretical material for students
Math 216 First Midterm 6 February, 2017
 Math 216 First Midterm 6 February, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material
Math 216 First Midterm 6 February, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material
CRASH COURSE IN PRECALCULUS
 CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 2012, Brooks/Cole
CRASH COURSE IN PRECALCULUS Shiah-Sen Wang The graphs are prepared by Chien-Lun Lai Based on : Precalculus: Mathematics for Calculus by J. Stuwart, L. Redin & S. Watson, 6th edition, 2012, Brooks/Cole
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
F and G have continuous second-order derivatives. Assume Equation (1.1) possesses an equilibrium point (x*,y*) so that
 possesses an equilibrium point (x*,y*) so that") 3.1.6. Characterizing solutions (continued) C4. Stability analysis for nonlinear dynamical systems In many economic problems, the equations describing the evolution of a system are non-linear. The behaviour
3.1.6. Characterizing solutions (continued) C4. Stability analysis for nonlinear dynamical systems In many economic problems, the equations describing the evolution of a system are non-linear. The behaviour
Math 1553, Introduction to Linear Algebra
 Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form
 Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories
 Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 6, 203 Outline
Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 6, 203 Outline
Slope Fields: Graphing Solutions Without the Solutions
 8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Vectors and Fields. Vectors versus scalars
 C H A P T E R 1 Vectors and Fields Electromagnetics deals with the study of electric and magnetic fields. It is at once apparent that we need to familiarize ourselves with the concept of a field, and in
C H A P T E R 1 Vectors and Fields Electromagnetics deals with the study of electric and magnetic fields. It is at once apparent that we need to familiarize ourselves with the concept of a field, and in
Math 3301 Homework Set Points ( ) ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )
 ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )") #7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
#7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
C. Non-linear Difference and Differential Equations: Linearization and Phase Diagram Technique
 C. Non-linear Difference and Differential Equations: Linearization and Phase Diaram Technique So far we have discussed methods of solvin linear difference and differential equations. Let us now discuss
C. Non-linear Difference and Differential Equations: Linearization and Phase Diaram Technique So far we have discussed methods of solvin linear difference and differential equations. Let us now discuss
Brief Review of Vector Algebra
 APPENDIX Brief Review of Vector Algebra A.0 Introduction Vector algebra is used extensively in computational mechanics. The student must thus understand the concepts associated with this subject. The current
APPENDIX Brief Review of Vector Algebra A.0 Introduction Vector algebra is used extensively in computational mechanics. The student must thus understand the concepts associated with this subject. The current
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories
 Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 6, 2013 Outline
Linear Systems of ODE: Nullclines, Eigenvector lines and trajectories James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 6, 2013 Outline
MAT 22B - Lecture Notes
 MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
slides chapter 3 an open economy with capital
 slides chapter 3 an open economy with capital Princeton University Press, 2017 Motivation In this chaper we introduce production and physical capital accumulation. Doing so will allow us to address two
slides chapter 3 an open economy with capital Princeton University Press, 2017 Motivation In this chaper we introduce production and physical capital accumulation. Doing so will allow us to address two
Math 273 (51) - Final
 - Final") Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
Midterm 2. MAT17C, Spring 2014, Walcott
 Mierm 2 MAT7C, Spring 24, Walcott Note: There are SEVEN questions. Points for each question are shown in a table below and also in parentheses just after each question (and part). Be sure to budget our
Mierm 2 MAT7C, Spring 24, Walcott Note: There are SEVEN questions. Points for each question are shown in a table below and also in parentheses just after each question (and part). Be sure to budget our
Designing Information Devices and Systems II Fall 2015 Note 22
 EE 16B Designing Information Devices and Systems II Fall 2015 Note 22 Notes taken by John Noonan (11/12) Graphing of the State Solutions Open loop x(k + 1) = Ax(k) + Bu(k) y(k) = Cx(k) Closed loop x(k
EE 16B Designing Information Devices and Systems II Fall 2015 Note 22 Notes taken by John Noonan (11/12) Graphing of the State Solutions Open loop x(k + 1) = Ax(k) + Bu(k) y(k) = Cx(k) Closed loop x(k
We have two possible solutions (intersections of null-clines. dt = bv + muv = g(u, v). du = au nuv = f (u, v),
. du = au nuv = f (u, v),") Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Predator - Prey Model Trajectories are periodic
 Predator - Prey Model Trajectories are periodic James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 4, 2013 Outline 1 Showing The PP
Predator - Prey Model Trajectories are periodic James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 4, 2013 Outline 1 Showing The PP
1.1 GRAPHS AND LINEAR FUNCTIONS
 MATHEMATICS EXTENSION 4 UNIT MATHEMATICS TOPIC 1: GRAPHS 1.1 GRAPHS AND LINEAR FUNCTIONS FUNCTIONS The concept of a function is already familiar to you. Since this concept is fundamental to mathematics,
MATHEMATICS EXTENSION 4 UNIT MATHEMATICS TOPIC 1: GRAPHS 1.1 GRAPHS AND LINEAR FUNCTIONS FUNCTIONS The concept of a function is already familiar to you. Since this concept is fundamental to mathematics,
is a maximizer. However this is not the case. We will now give a graphical argument explaining why argue a further condition must be satisfied.
 D. Maimization with two variables D. Sufficient conditions for a maimum Suppose that the second order conditions hold strictly. It is tempting to believe that this might be enough to ensure that is a maimizer.
D. Maimization with two variables D. Sufficient conditions for a maimum Suppose that the second order conditions hold strictly. It is tempting to believe that this might be enough to ensure that is a maimizer.
AP Physics C Mechanics Vectors
 1 AP Physics C Mechanics Vectors 2015 12 03 www.njctl.org 2 Scalar Versus Vector A scalar has only a physical quantity such as mass, speed, and time. A vector has both a magnitude and a direction associated
1 AP Physics C Mechanics Vectors 2015 12 03 www.njctl.org 2 Scalar Versus Vector A scalar has only a physical quantity such as mass, speed, and time. A vector has both a magnitude and a direction associated
Math 216 First Midterm 19 October, 2017
 Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Worksheet 8 Sample Solutions
 Technische Universität München WS 2016/17 Lehrstuhl für Informatik V Scientific Computing Univ.-Prof. Dr. M. Bader 19.12.2016/21.12.2016 M.Sc. S. Seckler, M.Sc. D. Jarema Worksheet 8 Sample Solutions Ordinary
Technische Universität München WS 2016/17 Lehrstuhl für Informatik V Scientific Computing Univ.-Prof. Dr. M. Bader 19.12.2016/21.12.2016 M.Sc. S. Seckler, M.Sc. D. Jarema Worksheet 8 Sample Solutions Ordinary
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Two Hanging Masses. ) by considering just the forces that act on it. Use Newton's 2nd law while
 by considering just the forces that act on it. Use Newton's 2nd law while") Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Lotka Volterra Predator-Prey Model with a Predating Scavenger
 Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Introduction to Vectors
 Introduction to Vectors K. Behrend January 31, 008 Abstract An introduction to vectors in R and R 3. Lines and planes in R 3. Linear dependence. 1 Contents Introduction 3 1 Vectors 4 1.1 Plane vectors...............................
Introduction to Vectors K. Behrend January 31, 008 Abstract An introduction to vectors in R and R 3. Lines and planes in R 3. Linear dependence. 1 Contents Introduction 3 1 Vectors 4 1.1 Plane vectors...............................
Deep Learning. Authors: I. Goodfellow, Y. Bengio, A. Courville. Chapter 4: Numerical Computation. Lecture slides edited by C. Yim. C.
 Chapter 4: Numerical Computation Deep Learning Authors: I. Goodfellow, Y. Bengio, A. Courville Lecture slides edited by 1 Chapter 4: Numerical Computation 4.1 Overflow and Underflow 4.2 Poor Conditioning
Chapter 4: Numerical Computation Deep Learning Authors: I. Goodfellow, Y. Bengio, A. Courville Lecture slides edited by 1 Chapter 4: Numerical Computation 4.1 Overflow and Underflow 4.2 Poor Conditioning
21.4 Electric Field and Electric Forces
 21.4 Electric Field and Electric Forces How do charged particles interact in empty space? How do they know the presence of each other? What goes on in the space between them? Body A produces an electric
21.4 Electric Field and Electric Forces How do charged particles interact in empty space? How do they know the presence of each other? What goes on in the space between them? Body A produces an electric
DIRECTION OF TIDES According to MATTER (Re-examined)
") DIRECTION OF TIDES According to MATTER (Re-examined) Nainan K. Varghese, matterdoc@gmail.com http://www.matterdoc.info Abstract: This article attempts to give a simple and logical explanation to the mechanism
DIRECTION OF TIDES According to MATTER (Re-examined) Nainan K. Varghese, matterdoc@gmail.com http://www.matterdoc.info Abstract: This article attempts to give a simple and logical explanation to the mechanism
APPENDIX Should the Private Sector Provide Public Capital?
 APPENIX Should the Private Sector Provide Public Capital? Santanu Chatterjee epartment of Economics Terry College of Business University of eorgia Appendix A The appendix describes the optimization problem
APPENIX Should the Private Sector Provide Public Capital? Santanu Chatterjee epartment of Economics Terry College of Business University of eorgia Appendix A The appendix describes the optimization problem
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Understanding the damped SHM without ODEs
 This is an author-created, un-copyedited version of an article accepted for publication in Physics Education. IOP Publishing Ltd is not responsible for any errors or omissions in this version of the manuscript
This is an author-created, un-copyedited version of an article accepted for publication in Physics Education. IOP Publishing Ltd is not responsible for any errors or omissions in this version of the manuscript
Algebra 1 S1 Lesson Summaries. Lesson Goal: Mastery 70% or higher
 Algebra 1 S1 Lesson Summaries For every lesson, you need to: Read through the LESSON REVIEW which is located below or on the last page of the lesson and 3-hole punch into your MATH BINDER. Read and work
Algebra 1 S1 Lesson Summaries For every lesson, you need to: Read through the LESSON REVIEW which is located below or on the last page of the lesson and 3-hole punch into your MATH BINDER. Read and work
Clinton Community School District K-8 Mathematics Scope and Sequence
 6_RP_1 6_RP_2 6_RP_3 Domain: Ratios and Proportional Relationships Grade 6 Understand the concept of a ratio and use ratio language to describe a ratio relationship between two quantities. Understand the
6_RP_1 6_RP_2 6_RP_3 Domain: Ratios and Proportional Relationships Grade 6 Understand the concept of a ratio and use ratio language to describe a ratio relationship between two quantities. Understand the
(ii) = F 75. F = 32 (N) Note: Bald answer of 32 (N) scores 2/2 marks. (iii) p = Possible ecf C1. pressure = (Pa)
 = F 75. F = 32 (N) Note: Bald answer of 32 (N) scores 2/2 marks. (iii) p = Possible ecf C1. pressure = (Pa)") Questions on Forces Mark Scheme 1. (i) Expected answer: For equilibrium of an object the sum of clockwise moments about a point = sum of anticlockwise moments about the same point. clockwise moment(s)
Questions on Forces Mark Scheme 1. (i) Expected answer: For equilibrium of an object the sum of clockwise moments about a point = sum of anticlockwise moments about the same point. clockwise moment(s)
The hitch in all of this is figuring out the two principal angles and which principal stress goes with which principal angle.
 Mohr s Circle The stress basic transformation equations that we developed allowed us to determine the stresses acting on an element regardless of its orientation as long as we know the basic stresses σx,
Mohr s Circle The stress basic transformation equations that we developed allowed us to determine the stresses acting on an element regardless of its orientation as long as we know the basic stresses σx,
Lecture 3. Dynamical Systems in Continuous Time
 Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Predator - Prey Model Trajectories are periodic
 Predator - Prey Model Trajectories are periodic James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 4, 2013 Outline Showing The PP Trajectories
Predator - Prey Model Trajectories are periodic James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 4, 2013 Outline Showing The PP Trajectories
UNIT 2 KINEMATICS OF LINKAGE MECHANISMS
 UNIT 2 KINEMATICS OF LINKAGE MECHANISMS ABSOLUTE AND RELATIVE VELOCITY An absolute velocity is the velocity of a point measured from a fixed point (normally the ground or anything rigidly attached to the
UNIT 2 KINEMATICS OF LINKAGE MECHANISMS ABSOLUTE AND RELATIVE VELOCITY An absolute velocity is the velocity of a point measured from a fixed point (normally the ground or anything rigidly attached to the
1.1 Linear Equations and Inequalities
 1.1 Linear Equations and Inequalities Linear Equation in 1 Variable Any equation that can be written in the following form: ax + b = 0 a,b R, a 0 and x is a variable Any equation has a solution, sometimes
1.1 Linear Equations and Inequalities Linear Equation in 1 Variable Any equation that can be written in the following form: ax + b = 0 a,b R, a 0 and x is a variable Any equation has a solution, sometimes
Rotational Equilibrium
 Rotational Equilibrium In this laboratory, we study the conditions for static equilibrium. Axis Through the Center of Gravity Suspend the meter stick at its center of gravity, with its numbers increasing
Rotational Equilibrium In this laboratory, we study the conditions for static equilibrium. Axis Through the Center of Gravity Suspend the meter stick at its center of gravity, with its numbers increasing
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
SECTION 1.8 : x = f LEARNING OBJECTIVES
 SECTION 1.8 : x = f (Section 1.8: x = f ( y) ( y)) 1.8.1 LEARNING OBJECTIVES Know how to graph equations of the form x = f ( y). Compare these graphs with graphs of equations of the form y = f ( x). Recognize
SECTION 1.8 : x = f (Section 1.8: x = f ( y) ( y)) 1.8.1 LEARNING OBJECTIVES Know how to graph equations of the form x = f ( y). Compare these graphs with graphs of equations of the form y = f ( x). Recognize
Algebra I Assessment. Eligible Texas Essential Knowledge and Skills
 Algebra I Assessment Eligible Texas Essential Knowledge and Skills STAAR Algebra I Assessment Reporting Category 1: Functional Relationships The student will describe functional relationships in a variety
Algebra I Assessment Eligible Texas Essential Knowledge and Skills STAAR Algebra I Assessment Reporting Category 1: Functional Relationships The student will describe functional relationships in a variety
SOLUTIONS TO THE FINAL EXAM. December 14, 2010, 9:00am-12:00 (3 hours)
") SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
Math 118, Fall 2014 Final Exam
 Math 8, Fall 4 Final Exam True or false Please circle your choice; no explanation is necessary True There is a linear transformation T such that T e ) = e and T e ) = e Solution Since T is linear, if T
Math 8, Fall 4 Final Exam True or false Please circle your choice; no explanation is necessary True There is a linear transformation T such that T e ) = e and T e ) = e Solution Since T is linear, if T
3.5 Competition Models: Principle of Competitive Exclusion
 94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
1. Given the apparatus in front of you, What are the forces acting on the paper clip?
 Forces and Static Equilibrium - Worksheet 1. Given the apparatus in front of you, What are the forces acting on the paper clip? 2. Draw a free body diagram of the paper clip and plot all the forces acting
Forces and Static Equilibrium - Worksheet 1. Given the apparatus in front of you, What are the forces acting on the paper clip? 2. Draw a free body diagram of the paper clip and plot all the forces acting
Chapter 14: Finding the Equilibrium Solution and Exploring the Nature of the Equilibration Process
 Chapter 14: Finding the Equilibrium Solution and Exploring the Nature of the Equilibration Process Taking Stock: In the last chapter, we learned that equilibrium problems have an interesting dimension
Chapter 14: Finding the Equilibrium Solution and Exploring the Nature of the Equilibration Process Taking Stock: In the last chapter, we learned that equilibrium problems have an interesting dimension
Spacetime Diagrams Lab Exercise
 Spacetime Diagrams Lab Exercise The spacetime diagram (also known as a Minkowski diagram) is a tool that can used to graphically describe complex problems in special relativity. In many cases, with a properly
Spacetime Diagrams Lab Exercise The spacetime diagram (also known as a Minkowski diagram) is a tool that can used to graphically describe complex problems in special relativity. In many cases, with a properly
Equilibrium in Two Dimensions
 C h a p t e r 6 Equilibrium in Two Dimensions In this chapter, you will learn the following to World Class standards: 1. The Ladder Against the Wall 2. The Street Light 3. The Floor Beam 6-1 The Ladder
C h a p t e r 6 Equilibrium in Two Dimensions In this chapter, you will learn the following to World Class standards: 1. The Ladder Against the Wall 2. The Street Light 3. The Floor Beam 6-1 The Ladder
1 Matrices and Systems of Linear Equations. a 1n a 2n
 March 31, 2013 16-1 16. Systems of Linear Equations 1 Matrices and Systems of Linear Equations An m n matrix is an array A = (a ij ) of the form a 11 a 21 a m1 a 1n a 2n... a mn where each a ij is a real
March 31, 2013 16-1 16. Systems of Linear Equations 1 Matrices and Systems of Linear Equations An m n matrix is an array A = (a ij ) of the form a 11 a 21 a m1 a 1n a 2n... a mn where each a ij is a real
Solving Differential Equations: First Steps
 30 ORDINARY DIFFERENTIAL EQUATIONS 3 Solving Differential Equations Solving Differential Equations: First Steps Now we start answering the question which is the theme of this book given a differential
30 ORDINARY DIFFERENTIAL EQUATIONS 3 Solving Differential Equations Solving Differential Equations: First Steps Now we start answering the question which is the theme of this book given a differential
Vector x-component (N) y-component (N)
 y-component (N)") Name AP Physics C Summer Assignment 2014 Where calculations are required, show your work. Be smart about significant figures. Print these sheets and hand them in (neatly done) on the first day of class.
Name AP Physics C Summer Assignment 2014 Where calculations are required, show your work. Be smart about significant figures. Print these sheets and hand them in (neatly done) on the first day of class.
Matrices, Linearization, and the Jacobi matrix. y f x g y g J = dy/dt = g(x, y) Theoretical Biology, Utrecht University
 Theoretical Biology, Utrecht University") Matrices, Linearization, and the Jacobi matrix { dx/dt f(x, y dy/dt g(x, y ( x f J y f x g y g λ 1, tr ± tr 4 det Theoretical Biology, Utrecht University i c Utrecht University, 018 Ebook publically available
Matrices, Linearization, and the Jacobi matrix { dx/dt f(x, y dy/dt g(x, y ( x f J y f x g y g λ 1, tr ± tr 4 det Theoretical Biology, Utrecht University i c Utrecht University, 018 Ebook publically available
Lyapunov functions and stability problems
 Lyapunov functions and stability problems Gunnar Söderbacka, Workshop Ghana, 29.5-10.5, 2013 1 Introduction In these notes we explain the power of Lyapunov functions in determining stability of equilibria
Lyapunov functions and stability problems Gunnar Söderbacka, Workshop Ghana, 29.5-10.5, 2013 1 Introduction In these notes we explain the power of Lyapunov functions in determining stability of equilibria