The Journal of Mathematical Neuroscience 2012, 2:8
|
|
|
- Shanna Copeland
- 5 years ago
- Views:
Transcription
1 The Journal of Mathematical Neuroscience This Provisional PDF corresponds to the article as it appeared upon acceptance. Fully formatted PDF and full text (HTML) versions will be made available soon. Analysis of stability and bifurcations of fixed points and periodic solutions of a lumped model of neocortex with two delays The Journal of Mathematical Neuroscience 2012, 2:8 doi: / Sid Visser (s.visser-1@utwente.nl) Hil G E Meijer (h.g.e.meijer@utwente.nl) Michel J A M van Putten (m.j.a.m.vanputten@utwente.nl) Stephan A van Gils (s.a.vangils@utwente.nl) ISSN Article type Research Submission date 4 October 2011 Acceptance date 25 April 2012 Publication date 25 April 2012 Article URL This peer-reviewed article was published immediately upon acceptance. It can be downloaded, printed and distributed freely for any purposes (see copyright notice below). For information about publishing your research in The Journal of Mathematical Neuroscience go to For information about other SpringerOpen publications go to Visser et al. ; licensee Springer. This is an open access article distributed under the terms of the Creative Commons Attribution License ( which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
2 Analysis of stability and bifurcations of fixed points and periodic solutions of a lumped model of neocortex with two delays Sid Visser 1,2, Hil GE Meijer 1,2, Michel JAM van Putten 2,3 and Stephan A van Gils 1,2 1 Department of Applied Mathematics, University of Twente, 7500 AE, Enschede, The Netherlands 2 MIRA Institute for Biomedical Engineering and Technical Medicine, University of Twente, Enschede, 7500 AE, The Netherlands 3 Department of Clinical Neurophysiology, Medisch Spectrum Twente, Enschede, 7500 KA, The Netherlands Corresponding author: s.visser-1@math.utwente.nl addresses: SV: s.visser-1@math.utwente.nl HGEM: h.g.e.meijer@utwente.nl MJAMvanP: m.j.a.m.vanputten@utwente.nl SAvanG: s.a.vangils@utwente.nl Abstract A lumped model of neural activity in neocortex is studied to identify regions of multi-stability of both steady states and periodic solutions. Presence of both steady states and periodic solutions is considered to correspond with epileptogenesis. The model, which consists of two delay differential equations with two fixed time lags, is mainly studied for its dependency on varying connection strength between populations. Equilibria are identified, and using linear stability analysis, all transitions are determined under which both trivial and non-trivial fixed points lose stability. Periodic solutions arising at some of these bifurcations are numerically studied with a two-parameter bifurcation analysis. Keywords: Linear stability; bifurcations; lumped model of neocortex. 1
3 Introduction Epilepsy is a neurological disease characterized by an increased risk of recurring seizures that affects about 1% of the world population. Such seizures typically manifest themselves as brief periods in which neural activity is more synchronized than a certain baseline level. In lumped models of neural activity in the brain, these seizures are, for that reason, often characterized as large-amplitude oscillations [1]. Many causes might exist for the neural network to start oscillating, e.g., a slow parameter or an external factor might cause a bifurcation [2], or a perturbation might force the system to a different attractor [3]. In this paper, we study the attractors and their bifurcations in a lumped model of superficial and deep pyramidal cells in neocortex that has been shown to correspond well with a large detailed model whose results conformed to experiments [4, 5]. The structure of this model is shown in Figure 1. Our main goal is to identify the dominating stable attractors in the system as well as their bifurcations for varying connection strength of the neural populations. The model proposed in [5] is essentially a continuous time two-node Hopfield network with discrete time delays and feedback that is governed by the following equations: dx 1 dt (t) = µ 1x 1 (t) F 1 (x 1 (t τ i )) + G 1 (x 2 (t τ e )) dx 2 dt (t) = µ 2x 2 (t) F 2 (x 2 (t τ i )) + G 2 (x 1 (t τ e )) (1) where x i is the node s activity, µ i the natural decay rate of activity, τ i the time lag of feedback inhibition, τ e the delay of feedforward excitation and both F i (x) and G i (x) are 2
4 bounded monotonically increasing functions that represent inhibitory and excitatory synaptic activation, respectively. Small Hopfield networks of this and similar forms have been studied in detail by various researches [6 22]. For example, Olien and Bélair [16] studied a two-node network with both delayed feedforward and delayed feedback connections between the nodes. Later, the same model was analyzed further by Wuan and Rei [18]. The delays in this model, however, are node-specific (the delays for all outgoing connections of a node are unique for that node) instead of connection-specific (the delays are unique for each type of connection: excitatory and inhibitory). The latter case applies to our network. We particularly notice the work by Shayer and Campbell [17] that studies a model very similar to the system (Equation 1) except for the fact that they choose the activation functions as odd functions. Although they numerically identify multi-stability of steady states and a periodic solution, their study mainly focuses on analytical determination of the stability and bifurcations of the trivial equilibrium in terms of the time lag parameters. In 2005, Campbell et al. studied the numerical continuation of periodic solutions in a ring of neurons [9]. We will extend a similar approach to a two-parameter bifurcation study in this work. Because Hopfield networks originate from computer science to solve mathematical programming problems [23], it is more common to study models of the Wilson-Cowan type for physiological modeling [24]. On that note, we like to point to a study by Coombes and Laing of a Wilson-Cowan type model, which is very similar to our model, in which they observe a variety of steady states, periodic solutions and chaos [25]. While Hopfield models are uncommon in mathematical neuroscience, we are not the first to study these models with a physiological relevance. For instance, Song et al. studied two clusters, each consisting of an excitatory and an inhibitory node that projected onto each other with delayed connections [26]. They assumed that the connections between the nodes could be faster in one direction than in the other, and they studied the model s dependency on this difference in time lags. Furthermore, they are, to our knowledge, the only group that has 3
5 performed a numerical bifurcation study of periodic orbits in two parameters for this type of model. Due to the physiological background of our model, the delays are known and we consider fixed values of τ i and τ e. Because of that, we are primarily interested in the parameters related to connection strength as these may be amended with anti-epileptic drugs. Although these results will depend on the chosen values of the delays, we elaborate on their robustness under variations of these delays in the discussion. Another difference with the pioneering works [7, 17] is related to symmetry in the model. They have chosen their functions F i and G i as odd functions, which introduces a reflectional symmetry. For physiological reasons, the model considered in this paper uses non-symmetric activation functions for the synapses because the activation of synapses is thought to be stronger than the deactivation. In order to reduce the number of parameters, we choose the following: µ 1 = µ 2 := µ, F 1 (x) = F 2 (x) := F(x), G 1 (x) = G 2 (x) := G(x). This choice of parameters and activation functions makes the model Z 2 -symmetric. The following expressions are chosen for the synaptic activation functions F(x) = a i S(σ i x), G(x) = a e S(σ e x) (2) for certain S that is smooth, strictly increasing and satisfies S(0) = 0 and S (0) = 1. Typically, S(x) is bounded and sigmoidal, i.e., S has exactly one inflection point. The results in section 2 are independent of the specific shape of S, but we will specify S for the numerical bifurcation analysis. In the remaining part of this article, we study the non-dimensionalized version of Equation 1 by taking x i ( t) := x i (µ t): d x 1 d t ( t) = x 1 ( t) α 1 S(β 1 x 1 ( t τ 1 )) + α 2 S(β 2 x 2 ( t τ 2 )), d x 2 d t ( t) = x 2 ( t) α 1 S(β 1 x 2 ( t τ 1 )) + α 2 S(β 2 x 1 ( t τ 2 )), (3) 4
6 with α 1 := a i µ, β 1 := σ i, α 2 := a e µ, β 2 := σ e, τ 1 := µτ i and τ 2 := µτ e. For convenience, we drop the tildes from now on and switch to vector notation: ẋ(t) = f(x t ), with x t C([ h, 0], R 2 ) and h = max(τ 1, τ 2 ). (4) In the following section, we will study this system analytically by determining its fixed points and the linear stability of these points. We will identify a stability region in parameter space and classify the bifurcations on the edge of this region. For Hopf bifurcations of the trivial steady state, we compute the first Lyapunov coefficient to study the criticality of these bifurcations. In the Numerical bifurcation analysis section, we use software packages to determine (numerically) how the presence and stability of the bifurcating periodic solutions depend on the parameters α 1 and α 2. Equilibria: linear stability and bifurcations In this section, we study the equilibria as well as their linear stability. Necessary conditions for saddle-node, trans-critical and Hopf bifurcations are derived. Thereafter, the first Lyapunov coefficient is evaluated for the Hopf bifurcations to determine their criticality. Equilibria and stability region First we note, since S(0) = 0, that the origin (x 1, x 2 ) = (0, 0) is always a fixed point of the system (Equation 4). For the non-trivial fixed points, the following holds: Theorem 1. The system (Equation 4) admits exclusively symmetric fixed points: f(x ) = 0 = x = (x, x ) for some x R. Proof. First we note that, since S(x) is a continuous strictly increasing function, its inverse function S 1 (x) exists, and it is also continuous and strictly increasing. Next define: H(x) := 1 ( ) 1 S 1 (x + α 1 S(β 1 x)). β 2 α 2 Because of monotonicity of both S and S 1 and positiveness of all parameters, H is continuous and strictly increasing as well. 5
7 Fixed points of Equation 4 satisfy f(x ) = 0 which is equivalent to: { x 2 = H(x 1), x 1 = H(x 2). (5) Assume that the equilibrium is asymmetric and that x 1 < x 2 without loss of generality. Application of H on both sides of this inequality and use of the conditions in Equation 5 yield: x 2 = H(x 1) < H(x 2) = x 1. This contradicts our assumption; hence, we conclude that x 1 = x 2 = x. Due to the symmetric positions of these fixed points, the linearization u(t) at these equilibria takes the following form: u 1 (t) = u 1 (t) k 1 u 1 (t τ 1 ) + k 2 u 2 (t τ 2 ), u 2 (t) = u 2 (t) k 1 u 2 (t τ 1 ) + k 2 u 1 (t τ 2 ), (6) with k 1 := α 1 β 1 S (β 1 x ) k 2 := α 2 β 2 S (β 2 x ). (7) Both k 1 and k 2 take positive values only because S is positive as well as the parameters α i and β i for i = 1, 2. Next, we look for exponential solutions of the form u(t) = e λt c with c C 2. For a non-trivial solution of Equation 6, it is required that (λ)c = 0, where (λ) is the characteristic matrix: [ ] λ k1 e (λ) = λτ 1 k 2 e λτ 2 k 2 e λτ 2 λ k 1 e λτ, (8) 1 Non-trivial solutions c exist if the characteristic equation is satisfied: 0 = det (λ) = (λ k 1 e λτ 1 + k 2 e λτ 2 ) (λ k }{{} 1 e λτ 1 k 2 e λτ 2 ). (9) }{{} := + (λ) := (λ) 6
8 From this decomposition, it follows that the spectrum of Equation 6 is the union of the spectra of the decoupled equations: v (t) = v (t) k 1 v (t τ 1 ) + k 2 v (t τ 2 ), v + (t) = v + (t) k 1 v + (t τ 1 ) k 2 v + (t τ 2 ). (10a) (10b) The spectra of linear DDEs with two delays, like Equation 10, have been studied extensively since the 1960s (for instance, Bellman, Cooke and Hale [27, 28]). The main consensus of these works is that the stability region often has a complex shape in terms of the parameters of the differential equation. The majority of the results in the remainder of this section and the next one (i.e. Bifurcations section) could be considered as common knowledge. For the purpose of clarity, however, we have chosen to present a short derivation of these results. We start by denoting the following theorem regarding symmetry of solutions: Theorem 2. Roots of correspond to symmetric solutions, whereas roots of + relate to asymmetric solutions. Proof. Let Z 2 act on R 2 so that 1 Z 2 acts as ξ(x, y) : (x, y) (y, x), then: { { (λ)v = 0 (λ)v = 0 (λ) = 0 and + (λ) = 0 ξv = v ξv = v. (11) Using the characteristic equation, we can find a relation between the parameters (k 1, k 2 ) and the eigenvalues: Theorem 3. Let λ = ρ + iω for ρ, ω R satisfy the characteristic equation (Equation 9) and let τ 2 > τ 1 > 0, then the following inequality holds: k 1 + k 2 e ρτ (1 + ρ) 2 + ω 2, τ = { τ 2 ρ < 0 τ 1 ρ 0. (12) 7
9 Proof. Solutions of the characteristic equation (Equation 9) satisfy either + (λ) = 0 or (λ) = 0. Upon assuming + (λ) = 0, it follows that: e max( ρτ 1, ρτ 2 ) ( k 1 + k 2 ) k 1 e ρτ 1 + k 2 e ρτ ρ + iω, which yields the inequality (Equation 12). A similar argument for (λ) yields the same inequality. Corollary 4. An equilibrium of the system (Equation 4) is asymptotically stable if k 1 + k 2 < 1. Proof. The inequality (Equation 12) yields in this case: e ρτ (1 + ρ) 2 + ω 2 < 1, (13) which can only hold for ρ < 0. Therefore, all roots of the characteristic matrix have a negative real part and the equilibrium is asymptotically stable. Having obtained a minimal stability region in the Corollary 4, we study conditions for bifurcations of equilibria to expand the minimal stability region determined by Corollary 4. Bifurcations The stability of an equilibrium of a DDE is lost when one or more eigenvalues pass through the origin or the imaginary axis. The first case, in which a real eigenvalue crosses through the origin, is characterized in the following theorem: Theorem 5. The linearized system (Equation 6) has at least one zero eigenvalue if and only if 1 + k 1 + k 2 = 0 or 1 + k 1 k 2 = 0. Proof. Substitution of λ = 0 into the characteristic equation (Equation 9) yields that either + (0) = 0 or (0) = 0 and hence: + (0) = 0 = 1 + k 1 + k 2 = 0, (0) = 0 = 1 + k 1 k 2 = 0. (14a) (14b) 8
10 Since the origin is always a fixed point of the system, the conditions in Theorem 5 correspond to transcritical bifurcations. For non-trivial fixed points, these conditions imply either a fold bifurcation or a trans-critical bifurcation. Because k 1 and k 2 are both positive, saddle-node bifurcations from + cannot occur. This, in combination with Theorem 2, leads to the conclusion that no symmetry-breaking steady-state bifurcations exist, a result which we also obtained in Theorem 1. The case in which a pair of complex eigenvalues passes the imaginary axis is summarized in the following theorem: Theorem 6. Two piecewise continuous functions h + (ω) and h (ω) exist in parameter space (k 1, k 2 ) for which the characteristic equation (Equation 9) has a pair of purely imaginary roots λ = ±iω. Furthermore, when ω = tan ωτ 1 = tan ωτ 2, a line k 1 + σk 2 = c exists for some c and σ = ±1 for which Equation 9 has roots ±iω. Proof. Substituting λ = iω with ω > 0 into Equation 9 yields that either + (iω) = 0 or (iω) = 0. The roots of + (iω) are considered first: iω k 1 e iωτ 1 + k 2 e iωτ 2 = 0. Splitting this equation in its real and imaginary part gives: [ ] [ ] [ ] cos(ωτ1 ) cos(ωτ 2 ) k1 1 =. (15) sin(ωτ 1 ) sin(ωτ 2 ) ω In the case that this matrix is invertible, we find the unique solution (k 1, k 2 ) in terms of ω by matrix inversion: [ ] k1 = h + (ω) := k 2 k 2 [ 1 sin(ωτ2 ) cos(ωτ 2 ) sin(ω(τ 2 τ 1 )) sin(ωτ 1 ) cos(ωτ 1 ) ] [ ] 1. (16) ω In the other case, the matrix is not invertible and, hence, its determinant is zero, yielding: tan ωτ 1 = tan ωτ 2. (17) Combined with the condition that [ 1, ω ] T R(A), A being the matrix in Equation 15, follows that: ω = tan(ωτ 1 ) = tan(ωτ 2 ). 9 (18a)
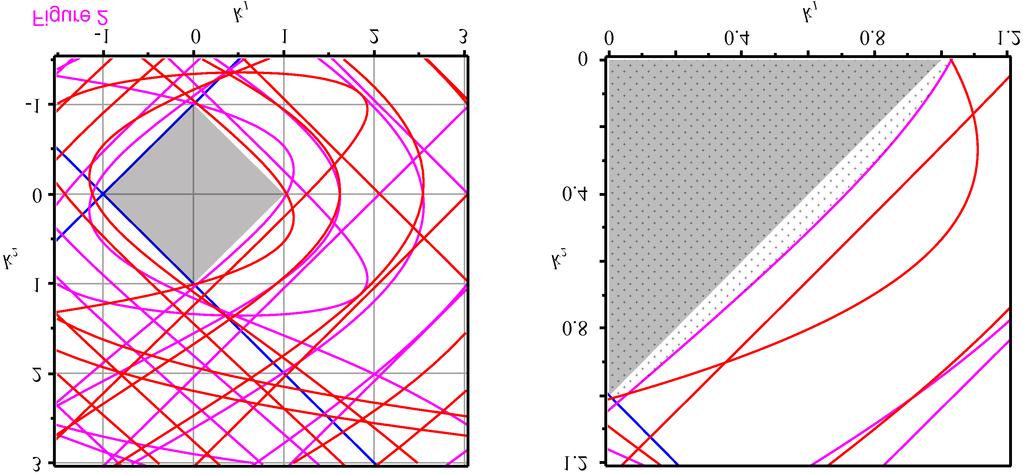
11 This yields the line of solutions: 1 k 1 + σk 2 = cos(ωτ 1 ) (18b) for σ = ±1 such that cos ωτ 1 = σ cos ωτ 2. The roots of (iω) are identified in a similar manner, yielding: [ ] [ ] [ ] k1 1 sin(ωτ2 ) cos(ωτ = h k (ω) := 2 ) 1. (19) 2 sin(ω(τ 2 τ 1 )) sin(ωτ 1 ) cos(ωτ 1 ) ω Furthermore, the same line of solutions and corresponding condition as in Equation 18 hold for (iω). For a Hopf bifurcation to occur, any of the equations (Equations 16 to 19) must be satisfied. In Theorem 2, we have already shown that Hopf bifurcations caused by correspond to symmetric periodic solutions. For Hopf bifurcations induced by +, the following holds: Theorem 7. Hopf bifurcations corresponding with + yield asymmetric periodic solutions, i.e., x 1 (t) = x 2 (t + 1 T ) with T the period of the solution. 2 Proof. Let λ = iω 0 for ω 0 > 0 be a simple root of + (i.e., of algebraic multiplicity one) and p a corresponding eigenvector of (iω 0 ). Then, from Hopf bifurcation theory, we know that, for ϵ, sufficiently small C 1 functions k (ϵ), ω (ϵ) and x (ϵ) exist, taking values in R 2, R and C([ h, 0], R 2 ), respectively. Furthermore, k (ϵ) h + (ω 0 ), ω (ϵ) ω 0 and x(ϵ)(t) = ϵr(e iω (ϵ)t p) + o(ϵ) for ϵ 0. For k = k (ϵ) and ϵ, sufficiently small solutions x(t) = x (ϵ)(t + θ) exist with θ [0, 2π/ω (ϵ)). 2π -periodic ω (ϵ) Since + (iω 0 ) = 0, it follows from Equation 11 that ξp = p. As the full non-linear equation commutes with ξ, it follows that the bifurcating periodic solution inherits this symmetric property: x(t + π ω (ϵ) ) = ϵr(eiω (ϵ)t+iπ p) = ξx(t) (20) So, the condition for asymmetric periodic solutions is satisfied. The different conditions for eigenvalues to have zero real part, as determined in Theorems 5 and 6, are displayed in the (k 1, k 2 )-plane in Figure 2. Due to the sine terms in the denominators of h + and h, these functions consist of numerous branches separated by 10
12 asymptotes. Intersections of these curves correspond to parameters at which the system satisfies conditions for two co-dimension one bifurcations and so we expect (at least) the following co-dimension two bifurcations: Bogdanov-Takens, fold-hopf and Hopf-Hopf. Studying the right diagram of Figure 2, we observe that the bifurcation curves do not coincide with the bounds of the stability region from Corollory 4. Hence, it appears that parameters exist outside this square stability region for which it still holds that all eigenvalues have negative real part. We now determine the full stability region around the origin of the (k 1, k 2 )-plane by showing that instabilities are exclusively induced by low frequencies. More precisely: Theorem 8. The square k 1 + k 2 < 1 + ω0 2 contains no eigenvalues λ = ±iω for ω ω 0 > 0. Proof. This follows from substitution of λ = iω 0 into Theorem 3 and the fact that 1 + ω0 2 is a monotically increasing function. So, if we choose ω 0 sufficiently large as dictated by Theorem 8, no other bifurcations are located inside the bifurcation diagrams of Figure 2 for ω > ω 0. Hence, we can extend the stability region from the square region to the nearest bifurcation. This new stability region is hatched in the right diagram of Figure 2. Since we are mainly interested in stable solutions, we consider only bifurcation curves that bound the stability region. Even though we identified a bounded stability region in parameter space, we cannot assure that this is the only region in which fixed points are stable. As shown in [29], the roots of either or + can contain multiple, disjoint regions in parameter space in which all roots have negative real parts. Since in our case, however, the eigenvalues of Equation 6 are the union of the eigenvalues of the Equations 11
13 10a and b, we conjecture that no other stable regions exist in parameter space than the one shown in Figure 2. For the fixed parameters τ 1 = 11.6 and τ 2 = 20.3, we find that the stability region in the first quadrant is bounded by a line of fold bifurcations (Equation 14b) as well as both curves h + and h of Hopf bifurcations; see also Figure 3. For clarity, we denote the domains of ω for which these curves bound the stability region by Ω S (h + ) and Ω S (h ), respectively. We compute approximations of these ranges: Ω S (h + ) (0.148, 0.150), Ω S (h ) (0.250, 0.294). (21) Similarly, we identify the codim-2 bifurcations that bound the stability region. The fold-hopf bifurcation is located at: For the Hopf-Hopf bifurcation, we find: k ZH := h + (0.148) = k HH := h + (0.150) = h (0.294) = [ ] (22) [ ] (23) It follows from Equation 7 that, for the trivial equilibrium, the bifurcation diagram in the (k 1, k 2 )-plane determines the bifurcation diagram in the (α 1, α 2 )-plane up to linear rescaling. The first Lyapunov coefficient Hopf bifurcations give rise to either stable or unstable periodic solutions depending on the criticality. Therefore, we determine the first Lyapunov coefficient. Since it is easier to relate k 1 and k 2 to α 1 and α 2 in the origin than at non-trivial fixed points, we only consider Hopf bifurcations at the origin. 12
14 We follow the method described in [30]. Let p and q be eigenvectors of the characteristic matrix (iω) and (iω), respectively. We normalize these vectors such that q T (iω)p = 1. By choosing p = [1, 1] T as an eigenvector of (iω), q takes the form: [ ] [ ] q = q 0 :=. (24) 1 2(1 k 1 τ 1 e iωτ 1 + k2 τ 2 e iωτ 2 ) 1 For ϕ(t) = pe iωt, the first Lyapunov coefficient of a (candidate) Hopf bifurcation is defined as the real part of c 1 : c 1 = 1 2 qt D 3 f(0)(ϕ, ϕ, ϕ) + q T D 2 f(0)(e 0 (0) 1 D 2 f(0)(ϕ, ϕ), ϕ) qt D 2 f(0)(e 2iω (2iω) 1 D 2 f(0)(ϕ, ϕ), ϕ). (25) We note that f is symmetric, i.e., f j ([x, x]) = f(x) for j = 1, 2, and that it does not contain any cross terms, that is 2 x 1 x 2 f([x 1, x 2 ]) = 0. Therefore, both components of the differential operators D 2 f([x, x]) and D 3 f([x, x]) will be identical when evaluated for symmetric arguments and we denote these components by f (x) and f (x), respectively. By using the multi-linear properties of the operators, we expand c 1 : c 1 = 1 [ ] 2 q [ ] f (0)(e iωt, e iωt, e iωt ) 1 [ [ ] 1 + q f (0)(e iωt, e iωt )f (0)(e 0t, e iωt ) (0) [ ] 2 q [ ] f (0)(e iωt, e iωt )f (0)(e 2iωt, e iωt ) (2iω) 1. (26) 1 Evaluation of the differential operators and the matrix inversions yields: c 1 = q 0 ( S (0)(α 1 β 3 1e iωτ 1 α 2 β 3 2e iωτ 2 ) + 2S (0) 2 (α 1 β1 2 α 2 β2)(α 2 1 β1e 2 iωτ 1 α 2 β2e 2 iωτ 2 ) 1 + α 1 β 1 α 2 β 2 + S (0) 2 (α 1 β1e 2 2iωτ 1 α 2 β2e 2 2iωτ 2 )(α 1 β1e 2 iωτ 1 α 2 β2e 2 iωτ 2 ) ). (27) 1 + 2iω + α 1 β 1 e 2iωτ 1 α2 β 2 e 2iωτ 2 As the real part of this expression is too intricate to study analytically, we study the first Lyapunov coefficient only numerically. 13 ]
15 In Figure 2, we observe that, for chosen parameter τ 1 = 11.6 and τ 2 = 20.3, the stability region is primarily bounded by the curve h (ω) and so we study the Lyapunov coefficient along this boundary. Similarly as in [5], we choose β 1 = 2, β 2 = 1.2 and S(x; a) = (tanh(x a) + tanh(a)) cosh 2 (a), (28) with a = 1. Values of α 1 and α 2 are parameterized along the boundary using Equation 7 and (k 1, k 2 ) given by h (ω) with ω Ω S (h ). In this case, we find that the first Lyapunov coefficient has a root at: k GH := h (0.281) = [ ] (29) Such a root corresponds with a generalized Hopf bifurcation at which the criticality of the Hopf bifurcation changes. Hence, for ω < 0.281, the Hopf bifurcations are supercritical and for ω > the bifurcations are subcritical. So far, we have studied the fixed points and their bifurcations extensively, and we have shown that the system can exhibit stable periodic solutions. Since the further development of these periodic solutions cannot be studied with a local analysis of points, we must use a different approach to continue this study. Therefore, we explore the behavior of the periodic solutions numerically in the next section. Numerical bifurcation analysis Here, we investigate the outcome of the periodic solutions that emanate from the Hopf bifurcations in the above text. We turn to a numerical analysis since the orbits cannot be determined analytically. More specifically, we use dde-biftool [31] to study non-trivial fixed points, and for continuation of periodic solutions, we use Knut [32]. In the following analysis, we only describe branches of solutions that are by some means associated with stable solutions. Branches not resulting in stable solutions are not discussed further. One parameter bifurcations in α 2 First, a bifurcation analysis is done in a single parameter. Here, we have chosen to vary the parameter α 2 that represents the total amount of excitation in the system. The inhibition α 1 is fixed at 0.069, and the function S is chosen as Equation 28 with a = 1. 14
16 The bifurcation diagram is shown in Figure 4, and corresponding parameter values for the bifurcations are shown in Table 1. Each curve represents, for different solutions, the maximum value reached during one period of the solution at different parameter values. The color corresponds with the type of solution, while thick/thin lines correspond to stable/unstable branches. Fixed points The origin is a natural starting point of our discussion of the bifurcation analysis because it is always a fixed point of Equation 4. The origin is stable until it undergoes a subcritical Hopf bifurcation H 1. Thereafter, it goes through two other Hopf bifurcations and a branch point B 1. For this value of α 1, these Hopf bifurcations involve only unstable periodic solutions. Next, we follow the fixed point that emerges from the branch point B 1. This fixed point encounters numerous Hopf bifurcations until it reaches a fold bifurcation F 1. Thereafter, it rapidly undergoes two distinct subcritical Hopf bifurcations: H 2 and H 3, becoming stable at H 3. Continuing the intersecting fixed point at B 1 in the other direction, the steady state goes through two Hopf bifurcations until it gains stability at the subcritical Hopf bifurcation H 4 (not shown). The appearance of Hopf bifurcations for fixed points is detailed in the Bifucations section and Figure 2. If the trivial fixed point is considered, the variation of a single parameter maps the coefficients k 1 and k 2 into a straight line (Equation 7). This line, labeled E T, is shown in the k 1, k 2 -plane in Figure 5. The coefficients k 1 and k 2 belonging to non-trivial equilibria, however, vary in a more complex manner when a single parameter is adjusted. Once plotted, it becomes clear that this branch encounters 18 Hopf bifurcations between departure from and return to the stability region for this specific value of α 1 (see the curve E N in Figure 5). Whether a Hopf bifurcation is caused by a crossing of or + determines whether this Hopf bifurcation results in symmetric or asymmetric periodic solutions. Hence, we conclude that Hopf bifurcations H 1, H 2 and H 4 yield symmetric periodic solutions, and 15
17 that H 3 yields asymmetric ones. Periodic solutions Next, we investigate the periodic solutions emanating from the Hopf bifurcations H 1, H 2 and H 3. The branch of unstable periodic solutions that emerges from H 1 consists of 16
18 symmetric solutions. This matches with the analytical results since H 1 lies on h and it, therefore, corresponds with symmetric solutions. The branch subsequently goes through a subcritical Neimark-Sacker bifurcation (not shown), a supercritical period-doubling bifurcation P D 1, a limit point of cycles LP C 1 and a subcritical period-doubling bifurcation P D 2 at which it finally becomes stable. Then, the solution remains stable until it undergoes a supercritical period doubling bifurcation P D 3, folds over in LP C 2, goes through a subcritical period doubling bifurcation P D 4 and terminates in the Hopf bifurcation H 2. Solutions branching from P D 1 are asymmetric. This branch folds over near P D 1 and a second time at LP C 3 where it gains stability. Following this branch, stability is lost at LP C 4 and it ends in Hopf bifurcation H 3. We mention a branch sprouting from P D 3 of symmetric solutions that is initially stable but then folds over three times before it terminates in P D 4. Even though these solutions are initially stable, we have been unable to find these solutions in simulations because their domain of attraction is relatively small. Summary For fixed α 1, we find that system can have one or two stable steady states. More specifically, for values of α 2 between H 3 and H 1, two stable equilibria coexist. Stable symmetric periodic solutions exist for α 2 between P D 2 and P D 3, and stable asymmetric periodic solutions between LP C 3 and LP C 4. Multi-stability of two equilibria and two periodic solutions exists for α 2 between H 3 and P D 3. This is illustrated in Figure 6 where we calculated time series of the model with fixed parameters (α 2 = 0.55) but varying initial conditions: [x 1, x 2 ](t) = [0, 0.1], (30a) [x 1, x 2 ](t) = [1.5, 1.7], (30b) [ ( ) ( )] 2π 2π [x 1, x 2 ](t) = sin 15 t, sin 15 t, (30c) [ ( π ) ( π )] [x 1, x 2 ](t) = sin 30 t, sin 30 t, (30d) with 20.3 t 0. All four types of limiting behavior, as determined by the preceding bifurcation analysis, are observed. 17
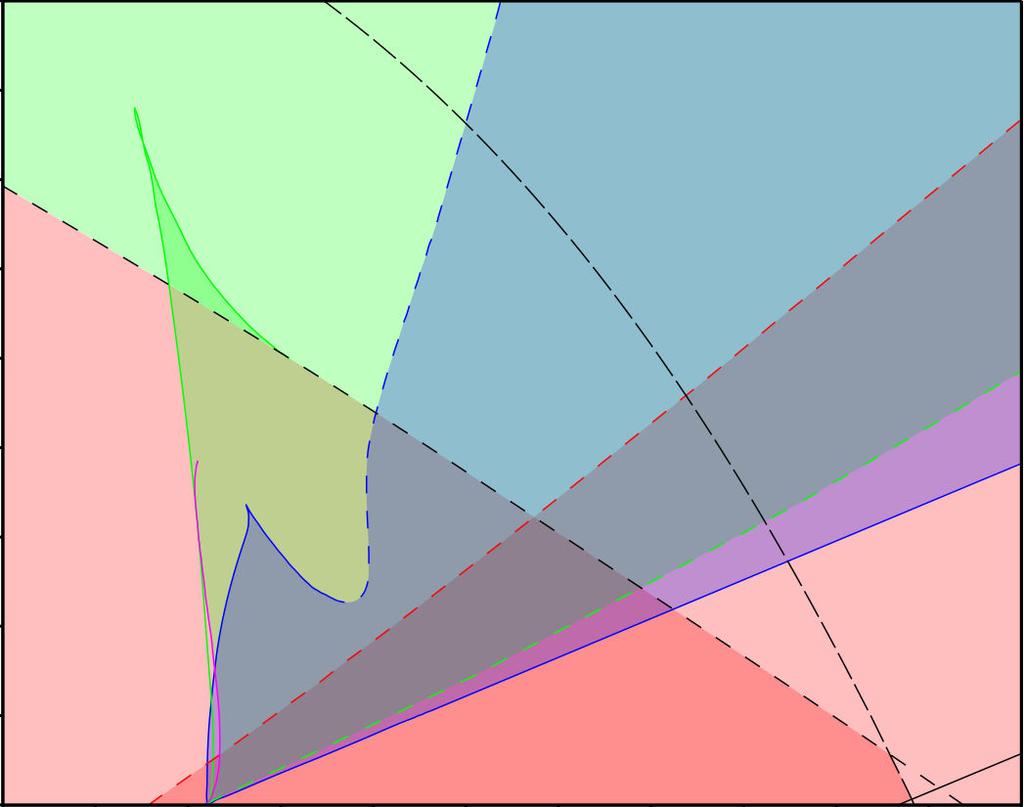
19 Two parameter bifurcations in α 1 and α 2 As stated before, we are mainly interested in the bifurcations at which stable solutions become unstable. These bifurcations (found with a one parameter analysis) are, therefore, continued in two parameters (α 1 and α 2 ). Figure 7 shows the relevant part of the bifurcation diagram of the system and Table 2 presents parameter values of the indicated bifurcation points. A small detail is magnified, but it shows a caricature of the complex structure. Mixed colors are used to indicate the co-existence of multiple stable solutions, but for clarity, we also show the stability regions for each type of solution separately in Figure 8. Steady states In the one-parameter analysis, we have found that the origin and the non-trivial steady state turn unstable at Hopf bifurcations H 1 and H 3, respectively. Continuing H 1 in two parameters yields a Hopf bifurcation curve, and on this curve, we find a Hopf-Hopf bifurcation HH 1. Following the second Hopf branch (H 5 ) involved, we find a transcritical-hopf point ZH 1 as it collides with B 1. This corresponds with the analysis of Bifurcations section where we showed the existence of zero-hopf and Hopf-Hopf points (see Equations 22 and 23). The arrangement of these curves is the same as in Figure 3 except for scaling. Since all involved Hopf curves at the points HH 1 and ZH 1 are subcritical, it follows then from the normal form analysis [33] that, for these parameters, no extra stable solutions exist near these points. Our analysis of the first Lyapunov coefficient also revealed the existence of a generalized Hopf bifurcation (see Equation 29). We numerically identify this point GH 1 along the 18
20 branch of H 1 by finding an emanating branch of limit point of cycles LP C 1 with Knut. When the Hopf bifurcation H 3 of the non-trivial equilibrium is followed, a zero-hopf bifurcation ZH 2 is found as H 3 collides with fold bifurcation F 1. We remark that the curves H 3 and F 1 are undistinguishable in the diagram since they are close to each other for all (α 1, α 2 ) considered. The bifurcation ZH 2 is a simple case ( [33], s = 1, θ > 0), yielding no additional stable solutions. These curves and the corresponding stability regions are shown in Figures 7 and 8. Bi-stability is indicated by the overlapping, darker region. Symmetric periodic solutions The stability region of the symmetric periodic solutions is bounded by P D 2 and P D 3. Continuation of P D 2 for stronger inhibition reveals a fold-flip bifurcation F F 1 where the period doubling bifurcation hits LP C 1 branch. Thereafter, it bends away and terminates. Continuing the LP C 1 curve in the same direction, we first find a cusp point CP 1 after which the curve ends in the generalized Hopf bifurcation GH 1. When P D 2 is continued in the other direction (less inhibition), it undergoes a 1:2-resonance bifurcation R2 1 (i.e., the period doubling branch encounters a period-doubling), and thereafter, it is subjected to a fold-flip bifurcation F F 2 with LP C 1. Following the LP C 1 curve at F F 2, we encounter another fold-flip bifurcation F F 3 and a cusp bifurcation CP 2. At this cusp point, the branch merges with LP C 2. The branch P D 3 does not undergo any bifurcation when continued for stronger inhibition. Continuation in the other direction reveals a 1:2-resonance bifurcation R2 2 and the previously identified fold-flip bifurcation F F 3. Unfolding the 1:2-resonance bifurcations R2 1 and R2 2 reveals that both points are connected by the curve NS 1 of Neimark-Sacker bifurcations. Therefore, this curve is also part of the boundary of the stability region of symmetric periodic solutions. From the unfolding of these 1:2-resonance bifurcations, we know that branches of stable homoclinic orbits should exist. However, we have been unable to continue these branches. 19
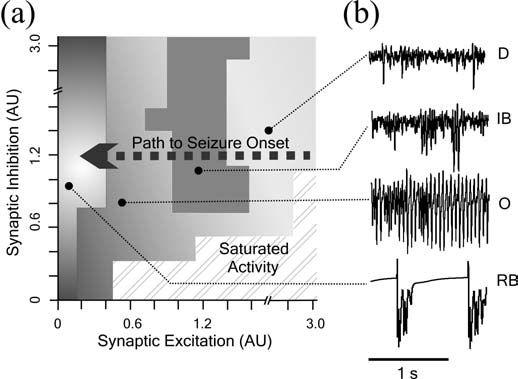
21 Asymmetric periodic solutions From single parameter continuation, it follows that stable asymmetric oscillations are bounded by LP C 3 and LP C 4. Continuation of LP C 3 yields a cusp point CP 3 and a 1:1-resonance bifurcation R1 1 at which the branch becomes unstable. Hereafter, the stability region is bounded by a branch of Neimark-Sacker bifurcation that sprouts from R1 1. When LP C 3 is continued in the other direction, it undergoes a cusp bifurcation (CP 4 ) at α 1 = 0 where LP C 3 merges with LP C 4. Summary With the two-parameter bifurcation analysis, we find that a large part of parameter space corresponds with multi-stability. In the center, we find a region with four different stable solutions: two steady states and two periodic solutions. Furthermore, it can be seen that steady states destabilize for strong values of inhibitory feedback (α 1 large) since only periodic solutions exist in the upper part of the bifurcation diagram. Comparison with a realistic model As this two-parameter bifurcation study might seem contrived for a fairly simple model, we like to make a comparison with a study of a more biologically realistic model. Van Drongelen et al. analyzed a small model of neocortex consisting of 656 neurons to study emergent epileptiform activity [4]. For similar reasons as in this study, they varied only parameters related to excitatory and inhibitory synaptic strength, and they then obtained Figure 9. In this figure, the behavior of their realistic model for different choices of parameters is categorized in one of five categories: desynchronized, irregular bursting, oscillatory, regular bursting and saturated activity. The small exemplary time series show for each class the characteristic behavior of the model except for saturated activity. This latter state is best described as a state in which all neurons are non-stop activated in an incoherent manner. In the regular bursting state, the model is rather quiet apart from a burst of activity that occurs regularly about every second. These bursts are primarily generated by slow dynamical processes in the underlying neurons. In the absence of slow processes, the network would exhibit no activity in this state [4]. Hence, this type of behavior should be 20
22 compared with the trivial steady state of our model. Furthermore, the non-trivial steady state in our simplified model corresponds with saturated activity in the detailed model because the network is very active, but no clear oscillations or rhythms are observed. Finally, the oscillatory state can be compatible with both the symmetric and asymmetric periodic solutions in our model. With these analogues for the observed types of network behavior in our mind, the bifurcation diagram in Figure 7 displays several strong similarities with the detailed network model in Figure 9. For low excitation, both models exhibit regular bursting/trivial steady-state solutions. Furthermore, we see in both cases a triangular region at the bottom in which both models exhibit saturated/non-trivial steady-state solutions. Finally, we observe that the above-mentioned regions are separated by a regime of oscillatory solutions. We also note that not all types of behavior in the detailed model have a counterpart in the simplified model, but we will elaborate on this in the discussion. Discussion In this paper, we have studied a continuous time two-node Hopfield network with two discrete time delays. The model has been derived in [5], and it describes the activity of two excitatory neural populations located in different layers of the mammalian neocortex. Inhibitory connections are assumed to exist only between neurons within the same population, whereas excitatory connections are exclusively made between both populations. Furthermore, a bifurcation study in the same article has shown that the model is able to produce different types of behavior that correspond to a realistic 656-neuron model of neocortex as proposed in [34]. This detailed model is able to reproduce phenomena observed in in vitro experiments in mouse [4]. By studying the population model more thoroughly, we hope to gain a better understanding of the complex 21
23 dynamics seen in the realistic 656-neuron model. In this way, new experiments for both in silico and in vitro environments can be proposed. Even though Hopfield networks of this and similar forms have been studied thoroughly in other works, these works mainly consider changes of the dynamics under variation of the time delays. As the time lags in our model are fixed because of the physiological background, we are mainly interested in the dynamics dependency on connectivity parameters. As a new contribution to this field, we have focused our study of the model on varying connection strengths of excitatory and inhibitory connections. All the bifurcations that we have identified in the model, both analytically and numerically, satisfied the non-degeneracy condition. Combined with the fact that the model depends smoothly on all parameters, all these bifurcations are structural. Hence, local variations of parameters will result in local variations of the bifurcations and the stability region. Some of the delicate bifurcation structures that we identified will be more sensitive to parameter variations, but only because of their limited separation in parameter space. For the steady states in the model, we have analytically determined conditions in terms of the coupling parameters for which these states become unstable due to bifurcations. We have found that both the trivial and the non-trivial equilibria undergo fold as well as Hopf bifurcations. The non-trivial equilibria, however, are the solution of a transcendental equation, and therefore, we have studied these bifurcations numerically. In this manner, we have identified a region in parameter space of bi-stability in which both the trivial and a non-trivial fixed point are stable. By studying the first Lyapunov coefficient at the Hopf bifurcations in the system, we have found both supercritical and subcritical bifurcations. Furthermore, we have analytically determined the type of bifurcating periodic solution, either symmetric (in-phase) or asymmetric (anti-phase) oscillations. The evolution of the periodic solutions arising at the Hopf bifurcations is studied numerically with continuation software. A large region in parameter space is determined in which both types of periodic solutions co-exist. Furthermore, we have identified numerous codim-2 bifurcations: cusp, generalized Hopf, 22
24 zero-hopf, Hopf-Hopf, fold-flip and both 1:1 and 1:2 resonance bifurcations. In the area where bistability exists between these different solutions, simulations have shown that the solutions often tend to the asymmetric solutions. Combining the stability regions of the steady states and the periodic solutions, we have found a region in parameter space in which four types of stable solutions co-exist: the trivial fixed point, a non-trivial fixed point and both symmetric and asymmetric periodic solutions. Although it has been shown in [35] that small Hopfield networks can exhibit chaotic behavior, we have not found such behavior in this study. The biological relevance of these results is, in our opinion, significant as well. We have shown that the complex bifurcation structure of the model matches with the dynamical changes seen in a biologically relevant model for variations of both excitatory and inhibitory strengths [4]. This relation is most clear for the regular bursting, oscillatory and saturated states of the detailed model because these have a clear equivalent attractor in the population model studied in this article. The other states of the detailed network, however, might be produced by the population model as part of a transient behavior. Long transients, during which the model resides close to several attractors for an extended period of time, are not uncommon for multi-stable delayed systems. Since these transients are not attractors themselves, they cannot be identified with a bifurcation analysis as in this study. Therefore, it remains to be determined whether the population model exhibits long transients and, if so, whether the time-series correspond with the two missing network states, i.e, desynchronized and irregular bursting as described in [4]. Although the considered model has very little resemblance with the structures of a real brain, we still believe that studying models like these provide new insights. Complex bifurcation structures and multi-stability observed in these models reveal possible transitions of network behavior that might not have been considered before. For that reason, we plan to seek and analyze such critical transitions more accurately with a detailed model of neuronal activity. Furthermore, we plan to investigate networks of similar systems in order to study emergent 23
25 patterns. It is promising that the combined analytical/numerical study of a single column already shows interesting dynamics, in particular, multi-stability. We expect to find patterns in such networks that will be relevant to understand observed patterns in slice experiments. Competing interests The authors declare that they have no competing interests. Acknowledgments The authors thank Odo Diekmann, Wim van Drongelen and Sebastiaan Janssens for giving helpful directions. The first author is supported by The Netherlands Organization of Scientific Research NWO, grant no , From Spiking Neurons to Brain Waves ). 24
26 References 1. Lytton WW: Computer modelling of epilepsy. Nat Rev Neurosci 2008, 9: Wendling F, Bartolomei F, Bellanger JJ, Chauvel P: Epileptic fast activity can be explained by a model of impaired GABAergic dendritic inhibition. Eur J Neurosci 2002, 15: Lopes da Silva FH, Blanes W, Kalitzin SN, Parra J, Suffczynski P, Velis DN: Epilepsies as dynamical diseases of brain systems: basic models of the transition between normal and epileptic activity. Epilepsia 2003, 44: van Drongelen W, Lee HC, Hereld M, Chen Z, Elsen FP, Stevens RL: Emergent epileptiform activity in neural networks with weak excitatory synapses. IEEE Trans Neural Syst Rehabil Eng 2005, 13: Visser S, Lee HC, Meijer HGE, van Drongelen W, van Putten MJAM, van Gils SA: Comparing epileptiform behavior of meso-scale detailed models and populations models of neocortex. Journal of Clinical Neurophysiology 2010, 27: Baldi P, Atiya A: How delays affect neural dynamics and learning. Neural Networks, IEEE Transactions on 1994, 5(4): Bélair J, Campbell SA: Stability and bifurcations of equilibria in a multiple-delayed differential equation. SIAM J. Appl. Math. 1994, 54: Campbell SA, Edwards R, van den Driessche P: Delayed coupling between two neural network loops. SIAM Journal on Applied Mathematics 2004, 65: Campbell SA, Yuan Y, Bungay SD: Equivariant Hopf bifurcation in a ring of identical cells with delayed coupling. Nonlinearity 2005, 18: Campbell SA, Ncube I, Wu J: Multistability and stable asynchronous periodic oscillations in a multiple-delayed neural system. Physica D: Nonlinear Phenomena 2006, 214(2):
27 11. Chen Y, Wu J: Minimal instability and unstable set of a phase-locked periodic orbit in a delayed neural network. Physica D: Nonlinear Phenomena 1999, 134(2): Faria T: On a planar system modelling a neuron network with memory. Journal of Differential Equations 2000, 168: Guo S, Huang L: Hopf bifurcating periodic orbits in a ring of neurons with delays. Physica D: Nonlinear Phenomena 2003, 183(1-2): Guo S, Chen Y, Wu J: Two-parameter bifurcations in a network of two neurons with multiple delays. Journal of Differential Equations 2008, 244(2): Huang L, Wu J: Nonlinear waves in networks of neurons with delayed feedback: pattern formation and continuation. SIAM Journal on Mathematical Analysis 2003, 34(4): Olien L, Bélair J: Bifurcations, stability, and monotonicity properties of a delayed neural network model. Physica D: Nonlinear Phenomena 1997, 102(3-4): Shayer LP, Campbell SA: Stability, bifurcation, and multistability in a system of two coupled neurons with multiple time delays. SIAM Journal on Applied Mathematics 2000, 61: Wei J, Ruan S: Stability and bifurcation in a neural network model with two delays. Physica D: Nonlinear Phenomena 1999, 130(3-4): Wei JJ, Velarde MG: Bifurcation analysis and existence of periodic solutions in a simple neural network with delays. Chaos: An Interdisciplinary Journal of Nonlinear Science 2004, 14(3): Wu J, Faria T, Huang YS: Synchronization and stable phase-locking in a network of neurons with memory. Mathematical and Computer Modelling 1999, 30(1-2):
28 21. Yuan Y, Campbell SA: Stability and synchronization of a ring of identical cells with delayed coupling. Journal of Dynamics and Differential Equations 2004, 16: Yuan Y: Dynamics in a delayed-neural network. Chaos, Solitons & Fractals 2007, 33(2): Wen UP, Lan KM, Shih HS: A review of Hopfield neural networks for solving mathematical programming problems. European Journal of Operational Research 2009, 198(3): Wilson HR, Cowan JD: Excitatory and inhibitory interactions in localized populations of model neurons. Biophysical Journal 1972, 12: Coombes S, Laing C: Delays in activity-based neural networks. Royal Society of London Philosophical Transactions Series A 2009, 367: Song Y, Makarov VA, Velarde MG: Stability switches, oscillatory multistability, and spatio-temporal patterns of nonlinear oscillations in recurrently delay coupled neural networks. Biol. Cybern. 2009, 101: Bellman R, Cooke KL: Differential-Difference Equations. Utah, USA: Academic Press; Hale JK: Functional Differential Equations. Applied Mathematical Sciences, Vol. 3. Berlin: Springer; Mahaffy JM, Zak PJ, Joiner KM: A geometric analysis of stability regions for a linear differential equation with two delays. International Journal of Bifurcation and Chaos 1995, 5(3): Diekmann O, van Gils SA, Verduyn-Lunel SM, Walther HO: Delay Equations: functional-, complex-, and nonlinear analysis. Applied Mathematical Sciences, Vol New York: Springer-Verlag;
29 31. Engelborghs K, Luzyanina T, Roose D: Numerical bifurcation analysis of delay differential equations using DDE-BIFTOOL. ACM Trans. Math. Softw. 2002, 28: Roose D, Szalai R: Continuation and bifurcation analysis of delay differential equations. In Numerical Continuation Methods for Dynamical Systems: Path following and boundary value problems. Edited by Krauskopf B, Osinga HM, Galan-Viogue J. New York: Springer-Canopus; 2007: Kuznetsov YA: Elements of Applied Bifurcation Theory. 3rd edition. New York: Springer; Van Drongelen W, Koch H, Elsen FP, Lee HC, Mrejeru A, Doren E, Marcuccilli CJ, Hereld M, Stevens RL, Ramirez JM: Role of persistent sodium current in bursting activity of mouse neocortical networks in vitro. J Neurophysiol 2006, 96: Lu H: Chaotic attractors in delayed neural networks. Physics Letters A 2002, 298(2-3): Figure 1. Overview of the model. Two cortical layers (red and blue) with excitatory pyramidal cells are connected mutually. The inhibition of the interneurons (green) is modeled intrinsically. Figure 2. Bifurcation curves in the (k 1, k 2 )-plane. τ 1 = 11.6 and τ 2 = The right plot shows a detail of the first quadrant only. Blue shows the conditions for fold or transcritical bifurcations (Equations 15a and b) and red and magenta depict Hopf bifurcations; equations h + and h, respectively. The gray area represents the stability region as in Corollary 4. The full stability region is hatched in the right diagram. Figure 3. Detail of bifurcations. Similar to Figure 2 but now showing the fine structure of branches bounding the stability region. The points ZH and HH correspond with the fold- Hopf and Hopf-Hopf bifurcations from Equations 22 and 23. For clarity, we do not show the stability region. Blue, fold/transcritical; red, asymmetric Hopf; magenta, symmetric Hopf. 28
30 Figure 4. Bifurcations in one parameter. The top shows the bifurcation diagram in α 2. Different colors represent different solutions, and a thick/thin line indicates that such a solution is stable/unstable. The four diagrams at the bottom show details of the four marked regions in the top diagram. τ 1 = 11.6, τ 2 = 20.3, α 1 = 0.069, β 1 = 2, β 2 = 1.2. Figure 5. Mapping to (k 1, k 2 )-plane. The curves E T (α 2 ) and E N (α 2 ) show the parametrization of the origin (trivial fixed point) and non-trivial fixed points, respectively, for fixed α 1. This figure illustrates how some solution branches can regain stability after encountering numerous bifurcations. Blue, fold/transcritical; red, asymmetric Hopf; magenta, symmetric periodic solution; black, parametrization of fixed points. Figure 6. Time series in multi-stable regime. Time series of the system for α 2 = 0.55, other parameters as in Figure 4 and initial conditions given by Equation 30. Solid and dashed lines correspond with x 1 and x 2. Solutions of all four stable branches are obtained: (A) trivial steady state, (B) non-trivial steady state, (C) symmetric periodic solutions and (D) asymmetric periodic solutions. Colors of these time series correspond with the branches in Figure 4. Figure 7. Bifurcations in two parameters. Bifurcation diagram in α 1 and α 2. Colored regions mark stability regions of indicated solutions. Overlapping areas, depicted with mixed colors, correspond with multi-stability. See text for a description of the points. Stability regions for individual solutions are shown in Figure 8 for clarity. Figure 8. Regions of multi-stability. Identical to Figure 7, but showing the stability regions of each type of solution separately. Two partially overlapping triangles corresponding with stability of fixed points (left), stability region for symmetric periodic solutions with a small area of bistability caused by cusp point CP 1 (middle), and region in parameter space where stable asymmetric periodic solutions exist (right). Figure 9. Behavior of a detailed network. This figure, copied with permission from [4], shows the behavioral changes of a large physiologically detailed model of neocortex. For varying strengths of excitatory and inhibitory connections, the model s behavior is classified in one of five categories. See text for a description of the network states and their correspondence to the population model. 29
31 Table 1. Overview of approximate parameter values for codim-1 bifurcations in α 2. Point α 2 H B F H H H P D LP C P D P D LP C P D LP C LP C Parameter α 1 is fixed at Table 2. Overview of approximate parameter values for codim-2 bifurcations in α 1 and α 2. Point α 2 α 1 HH ZH GH ZH F F R e-4 F F e-4 R e-4 F F e-4 CP CP e-4 CP R CP
32 E x 1 I E x 2 Figure 1 I
33
34 ZH HH k Figure 3 k
35
36 F 1 B H 2 H 3 H 4 H 1 k E N 2 ) E T 2 ) Figure 5 k 1
37
38 Figure 7


39 Figure 8
40 Figure 9
Analysis of a lumped model of neocortex to study epileptiform ac
 of a lumped model of neocortex to study epileptiform activity Sid Visser Hil Meijer Stephan van Gils March 21, 2012 What is epilepsy? Pathology Neurological disorder, affecting 1% of world population Characterized
of a lumped model of neocortex to study epileptiform activity Sid Visser Hil Meijer Stephan van Gils March 21, 2012 What is epilepsy? Pathology Neurological disorder, affecting 1% of world population Characterized
Stability and bifurcation of a simple neural network with multiple time delays.
 Fields Institute Communications Volume, 999 Stability and bifurcation of a simple neural network with multiple time delays. Sue Ann Campbell Department of Applied Mathematics University of Waterloo Waterloo
Fields Institute Communications Volume, 999 Stability and bifurcation of a simple neural network with multiple time delays. Sue Ann Campbell Department of Applied Mathematics University of Waterloo Waterloo
Additive resonances of a controlled van der Pol-Duffing oscillator
 Additive resonances of a controlled van der Pol-Duffing oscillator This paper has been published in Journal of Sound and Vibration vol. 5 issue - 8 pp.-. J.C. Ji N. Zhang Faculty of Engineering University
Additive resonances of a controlled van der Pol-Duffing oscillator This paper has been published in Journal of Sound and Vibration vol. 5 issue - 8 pp.-. J.C. Ji N. Zhang Faculty of Engineering University
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting
 International Journal of Basic & Applied Sciences IJBAS-IJENS Vol:13 No:05 55 Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting K. Saleh Department of Mathematics, King Fahd
International Journal of Basic & Applied Sciences IJBAS-IJENS Vol:13 No:05 55 Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting K. Saleh Department of Mathematics, King Fahd
Title. Author(s)Fujii, Hiroshi; Tsuda, Ichiro. CitationNeurocomputing, 58-60: Issue Date Doc URL. Type.
Fujii, Hiroshi; Tsuda, Ichiro. CitationNeurocomputing, 58-60: Issue Date Doc URL. Type.") Title Neocortical gap junction-coupled interneuron systems exhibiting transient synchrony Author(s)Fujii, Hiroshi; Tsuda, Ichiro CitationNeurocomputing, 58-60: 151-157 Issue Date 2004-06 Doc URL http://hdl.handle.net/2115/8488
Title Neocortical gap junction-coupled interneuron systems exhibiting transient synchrony Author(s)Fujii, Hiroshi; Tsuda, Ichiro CitationNeurocomputing, 58-60: 151-157 Issue Date 2004-06 Doc URL http://hdl.handle.net/2115/8488
Difference Resonances in a controlled van der Pol-Duffing oscillator involving time. delay
 Difference Resonances in a controlled van der Pol-Duffing oscillator involving time delay This paper was published in the journal Chaos, Solitions & Fractals, vol.4, no., pp.975-98, Oct 9 J.C. Ji, N. Zhang,
Difference Resonances in a controlled van der Pol-Duffing oscillator involving time delay This paper was published in the journal Chaos, Solitions & Fractals, vol.4, no., pp.975-98, Oct 9 J.C. Ji, N. Zhang,
Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback
 Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback Gautam C Sethia and Abhijit Sen Institute for Plasma Research, Bhat, Gandhinagar 382 428, INDIA Motivation Neural Excitability
Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback Gautam C Sethia and Abhijit Sen Institute for Plasma Research, Bhat, Gandhinagar 382 428, INDIA Motivation Neural Excitability
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
STABILITY ANALYSIS OF DELAY DIFFERENTIAL EQUATIONS WITH TWO DISCRETE DELAYS
 CANADIAN APPLIED MATHEMATICS QUARTERLY Volume 20, Number 4, Winter 2012 STABILITY ANALYSIS OF DELAY DIFFERENTIAL EQUATIONS WITH TWO DISCRETE DELAYS XIHUI LIN AND HAO WANG ABSTRACT. We use an algebraic
CANADIAN APPLIED MATHEMATICS QUARTERLY Volume 20, Number 4, Winter 2012 STABILITY ANALYSIS OF DELAY DIFFERENTIAL EQUATIONS WITH TWO DISCRETE DELAYS XIHUI LIN AND HAO WANG ABSTRACT. We use an algebraic
Time Delays in Neural Systems
 Time Delays in Neural Systems Sue Ann Campbell 1 Department of Applied Mathematics, University of Waterloo, Waterloo ON N2l 3G1 Canada sacampbell@uwaterloo.ca Centre for Nonlinear Dynamics in Physiology
Time Delays in Neural Systems Sue Ann Campbell 1 Department of Applied Mathematics, University of Waterloo, Waterloo ON N2l 3G1 Canada sacampbell@uwaterloo.ca Centre for Nonlinear Dynamics in Physiology
Research Article Stability Switches and Hopf Bifurcations in a Second-Order Complex Delay Equation
 Hindawi Mathematical Problems in Engineering Volume 017, Article ID 679879, 4 pages https://doi.org/10.1155/017/679879 Research Article Stability Switches and Hopf Bifurcations in a Second-Order Complex
Hindawi Mathematical Problems in Engineering Volume 017, Article ID 679879, 4 pages https://doi.org/10.1155/017/679879 Research Article Stability Switches and Hopf Bifurcations in a Second-Order Complex
/639 Final Solutions, Part a) Equating the electrochemical potentials of H + and X on outside and inside: = RT ln H in
 Equating the electrochemical potentials of H + and X on outside and inside: = RT ln H in") 580.439/639 Final Solutions, 2014 Question 1 Part a) Equating the electrochemical potentials of H + and X on outside and inside: RT ln H out + zf 0 + RT ln X out = RT ln H in F 60 + RT ln X in 60 mv =
580.439/639 Final Solutions, 2014 Question 1 Part a) Equating the electrochemical potentials of H + and X on outside and inside: RT ln H out + zf 0 + RT ln X out = RT ln H in F 60 + RT ln X in 60 mv =
Dynamic Feedback and the Design of Closed-loop Drug Delivery Systems
 Dynamic Feedback and the Design of Closed-loop Drug Delivery Systems John Milton 1,2, Sue Ann Campbell 2,3,4 and Jacques Bélair 2,4,5 1) Department of Neurology, The University of Chicago Hospitals, MC
Dynamic Feedback and the Design of Closed-loop Drug Delivery Systems John Milton 1,2, Sue Ann Campbell 2,3,4 and Jacques Bélair 2,4,5 1) Department of Neurology, The University of Chicago Hospitals, MC
as Hopf Bifurcations in Time-Delay Systems with Band-limited Feedback
 as Hopf Bifurcations in Time-Delay Systems with Band-limited Feedback Lucas Illing and Daniel J. Gauthier Department of Physics Center for Nonlinear and Complex Systems Duke University, North Carolina
as Hopf Bifurcations in Time-Delay Systems with Band-limited Feedback Lucas Illing and Daniel J. Gauthier Department of Physics Center for Nonlinear and Complex Systems Duke University, North Carolina
Stable cycles in a Cournot duopoly model of Kopel
 Journal of Computational and Applied Mathematics 18 (008 47 58 www.elsevier.com/locate/cam Stable cycles in a Cournot duopoly model of Kopel W. Govaerts a,, R. Khoshsiar Ghaziani a,b a Department of Applied
Journal of Computational and Applied Mathematics 18 (008 47 58 www.elsevier.com/locate/cam Stable cycles in a Cournot duopoly model of Kopel W. Govaerts a,, R. Khoshsiar Ghaziani a,b a Department of Applied
{ =y* (t)=&y(t)+ f(x(t&1), *)
=&y(t)+ f(x(t&1), *)") Journal of Differential Equations 69, 6463 (00) doi:0.006jdeq.000.390, available online at http:www.idealibrary.com on The Asymptotic Shapes of Periodic Solutions of a Singular Delay Differential System
Journal of Differential Equations 69, 6463 (00) doi:0.006jdeq.000.390, available online at http:www.idealibrary.com on The Asymptotic Shapes of Periodic Solutions of a Singular Delay Differential System
STABILITY AND HOPF BIFURCATION ON A TWO-NEURON SYSTEM WITH TIME DELAY IN THE FREQUENCY DOMAIN *
 International Journal of Bifurcation and Chaos, Vol. 7, No. 4 (27) 355 366 c World Scientific Publishing Company STABILITY AND HOPF BIFURCATION ON A TWO-NEURON SYSTEM WITH TIME DELAY IN THE FREQUENCY DOMAIN
International Journal of Bifurcation and Chaos, Vol. 7, No. 4 (27) 355 366 c World Scientific Publishing Company STABILITY AND HOPF BIFURCATION ON A TWO-NEURON SYSTEM WITH TIME DELAY IN THE FREQUENCY DOMAIN
SIMPLE CHAOTIC FLOWS WITH ONE STABLE EQUILIBRIUM
 International Journal of Bifurcation and Chaos, Vol. 23, No. 11 (2013) 1350188 (7 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127413501885 SIMPLE CHAOTIC FLOWS WITH ONE STABLE EQUILIBRIUM
International Journal of Bifurcation and Chaos, Vol. 23, No. 11 (2013) 1350188 (7 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127413501885 SIMPLE CHAOTIC FLOWS WITH ONE STABLE EQUILIBRIUM
2 1. Introduction. Neuronal networks often exhibit a rich variety of oscillatory behavior. The dynamics of even a single cell may be quite complicated
 GEOMETRIC ANALYSIS OF POPULATION RHYTHMS IN SYNAPTICALLY COUPLED NEURONAL NETWORKS J. Rubin and D. Terman Dept. of Mathematics; Ohio State University; Columbus, Ohio 43210 Abstract We develop geometric
GEOMETRIC ANALYSIS OF POPULATION RHYTHMS IN SYNAPTICALLY COUPLED NEURONAL NETWORKS J. Rubin and D. Terman Dept. of Mathematics; Ohio State University; Columbus, Ohio 43210 Abstract We develop geometric
Dynamical Systems in Neuroscience: Elementary Bifurcations
 Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
arxiv: v2 [physics.optics] 15 Dec 2016
![arxiv: v2 [physics.optics] 15 Dec 2016](/thumbs/86/94579401.jpg "arxiv: v2 [physics.optics] 15 Dec 2016") Bifurcation analysis of the Yamada model for a pulsing semiconductor laser with saturable absorber and delayed optical feedback Abstract Soizic Terrien 1, Bernd Krauskopf 1, Neil G.R. Broderick 2 arxiv:1610.06794v2
Bifurcation analysis of the Yamada model for a pulsing semiconductor laser with saturable absorber and delayed optical feedback Abstract Soizic Terrien 1, Bernd Krauskopf 1, Neil G.R. Broderick 2 arxiv:1610.06794v2
A model of slow plateau-like oscillations based upon the fast Na current in a window mode
 Neurocomputing 38}40 (2001) 159}166 A model of slow plateau-like oscillations based upon the fast Na current in a window mode G.S. Cymbalyuk*, R.L. Calabrese Biology Department, Emory University, 1510
Neurocomputing 38}40 (2001) 159}166 A model of slow plateau-like oscillations based upon the fast Na current in a window mode G.S. Cymbalyuk*, R.L. Calabrese Biology Department, Emory University, 1510
Activity types in a neural mass model
 Master thesis Activity types in a neural mass model Jurgen Hebbink September 19, 214 Exam committee: Prof. Dr. S.A. van Gils (UT) Dr. H.G.E. Meijer (UT) Dr. G.J.M. Huiskamp (UMC Utrecht) Contents 1 Introduction
Master thesis Activity types in a neural mass model Jurgen Hebbink September 19, 214 Exam committee: Prof. Dr. S.A. van Gils (UT) Dr. H.G.E. Meijer (UT) Dr. G.J.M. Huiskamp (UMC Utrecht) Contents 1 Introduction
Synchronization in delaycoupled bipartite networks
 Synchronization in delaycoupled bipartite networks Ram Ramaswamy School of Physical Sciences Jawaharlal Nehru University, New Delhi February 20, 2015 Outline Ø Bipartite networks and delay-coupled phase
Synchronization in delaycoupled bipartite networks Ram Ramaswamy School of Physical Sciences Jawaharlal Nehru University, New Delhi February 20, 2015 Outline Ø Bipartite networks and delay-coupled phase
Computational Neuroscience. Session 4-2
 Computational Neuroscience. Session 4-2 Dr. Marco A Roque Sol 06/21/2018 Two-Dimensional Two-Dimensional System In this section we will introduce methods of phase plane analysis of two-dimensional systems.
Computational Neuroscience. Session 4-2 Dr. Marco A Roque Sol 06/21/2018 Two-Dimensional Two-Dimensional System In this section we will introduce methods of phase plane analysis of two-dimensional systems.
Influence of Criticality on 1/f α Spectral Characteristics of Cortical Neuron Populations
 Influence of Criticality on 1/f α Spectral Characteristics of Cortical Neuron Populations Robert Kozma rkozma@memphis.edu Computational Neurodynamics Laboratory, Department of Computer Science 373 Dunn
Influence of Criticality on 1/f α Spectral Characteristics of Cortical Neuron Populations Robert Kozma rkozma@memphis.edu Computational Neurodynamics Laboratory, Department of Computer Science 373 Dunn
Phase Synchronization
 Phase Synchronization Lecture by: Zhibin Guo Notes by: Xiang Fan May 10, 2016 1 Introduction For any mode or fluctuation, we always have where S(x, t) is phase. If a mode amplitude satisfies ϕ k = ϕ k
Phase Synchronization Lecture by: Zhibin Guo Notes by: Xiang Fan May 10, 2016 1 Introduction For any mode or fluctuation, we always have where S(x, t) is phase. If a mode amplitude satisfies ϕ k = ϕ k
Research Article Hidden Periodicity and Chaos in the Sequence of Prime Numbers
 Advances in Mathematical Physics Volume 2, Article ID 5978, 8 pages doi:.55/2/5978 Research Article Hidden Periodicity and Chaos in the Sequence of Prime Numbers A. Bershadskii Physics Department, ICAR,
Advances in Mathematical Physics Volume 2, Article ID 5978, 8 pages doi:.55/2/5978 Research Article Hidden Periodicity and Chaos in the Sequence of Prime Numbers A. Bershadskii Physics Department, ICAR,
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
Dynamical systems in neuroscience. Pacific Northwest Computational Neuroscience Connection October 1-2, 2010
 Dynamical systems in neuroscience Pacific Northwest Computational Neuroscience Connection October 1-2, 2010 What do I mean by a dynamical system? Set of state variables Law that governs evolution of state
Dynamical systems in neuroscience Pacific Northwest Computational Neuroscience Connection October 1-2, 2010 What do I mean by a dynamical system? Set of state variables Law that governs evolution of state
Supporting Online Material for
 www.sciencemag.org/cgi/content/full/319/5869/1543/dc1 Supporting Online Material for Synaptic Theory of Working Memory Gianluigi Mongillo, Omri Barak, Misha Tsodyks* *To whom correspondence should be addressed.
www.sciencemag.org/cgi/content/full/319/5869/1543/dc1 Supporting Online Material for Synaptic Theory of Working Memory Gianluigi Mongillo, Omri Barak, Misha Tsodyks* *To whom correspondence should be addressed.
Research Article Hopf Bifurcation Analysis and Anticontrol of Hopf Circles of the Rössler-Like System
 Abstract and Applied Analysis Volume, Article ID 3487, 6 pages doi:.55//3487 Research Article Hopf Bifurcation Analysis and Anticontrol of Hopf Circles of the Rössler-Like System Ranchao Wu and Xiang Li
Abstract and Applied Analysis Volume, Article ID 3487, 6 pages doi:.55//3487 Research Article Hopf Bifurcation Analysis and Anticontrol of Hopf Circles of the Rössler-Like System Ranchao Wu and Xiang Li
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Controlling the cortex state transitions by altering the oscillation energy
 Controlling the cortex state transitions by altering the oscillation energy Valery Tereshko a and Alexander N. Pisarchik b a School of Computing, University of Paisley, Paisley PA 2BE, Scotland b Centro
Controlling the cortex state transitions by altering the oscillation energy Valery Tereshko a and Alexander N. Pisarchik b a School of Computing, University of Paisley, Paisley PA 2BE, Scotland b Centro
Existence of permanent oscillations for a ring of coupled van der Pol oscillators with time delays
 Global Journal of Pure and Applied Mathematics. ISSN 0973-1768 Volume 14, Number 1 (2018), pp. 139 152 Research India Publications http://www.ripublication.com/gjpam.htm Existence of permanent oscillations
Global Journal of Pure and Applied Mathematics. ISSN 0973-1768 Volume 14, Number 1 (2018), pp. 139 152 Research India Publications http://www.ripublication.com/gjpam.htm Existence of permanent oscillations
The Hopf-van der Pol System: Failure of a Homotopy Method
 DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Asynchronous oscillations due to antigenic variation in Malaria Pf
 Asynchronous oscillations due to antigenic variation in Malaria Pf Jonathan L. Mitchell and Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX SIAM LS, Pittsburgh, 21 Outline
Asynchronous oscillations due to antigenic variation in Malaria Pf Jonathan L. Mitchell and Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX SIAM LS, Pittsburgh, 21 Outline
University of Bristol - Explore Bristol Research. Early version, also known as pre-print
 Erzgraber, H, Krauskopf, B, & Lenstra, D (2004) Compound laser modes of mutually delay-coupled lasers : bifurcation analysis of the locking region Early version, also known as pre-print Link to publication
Erzgraber, H, Krauskopf, B, & Lenstra, D (2004) Compound laser modes of mutually delay-coupled lasers : bifurcation analysis of the locking region Early version, also known as pre-print Link to publication
On a Codimension Three Bifurcation Arising in a Simple Dynamo Model
 On a Codimension Three Bifurcation Arising in a Simple Dynamo Model Anne C. Skeldon a,1 and Irene M. Moroz b a Department of Mathematics, City University, Northampton Square, London EC1V 0HB, England b
On a Codimension Three Bifurcation Arising in a Simple Dynamo Model Anne C. Skeldon a,1 and Irene M. Moroz b a Department of Mathematics, City University, Northampton Square, London EC1V 0HB, England b
Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting
 Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting Eugene M. Izhikevich The MIT Press Cambridge, Massachusetts London, England Contents Preface xv 1 Introduction 1 1.1 Neurons
Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting Eugene M. Izhikevich The MIT Press Cambridge, Massachusetts London, England Contents Preface xv 1 Introduction 1 1.1 Neurons
Reaction-Diffusion Models and Bifurcation Theory Lecture 11: Bifurcation in delay differential equations
 Reaction-Diffusion Models and Bifurcation Theory Lecture 11: Bifurcation in delay differential equations Junping Shi College of William and Mary, USA Collaborators/Support Shanshan Chen (PhD, 2012; Harbin
Reaction-Diffusion Models and Bifurcation Theory Lecture 11: Bifurcation in delay differential equations Junping Shi College of William and Mary, USA Collaborators/Support Shanshan Chen (PhD, 2012; Harbin
Synchronization of a General Delayed Complex Dynamical Network via Adaptive Feedback
 Synchronization of a General Delayed Complex Dynamical Network via Adaptive Feedback Qunjiao Zhang and Junan Lu College of Mathematics and Statistics State Key Laboratory of Software Engineering Wuhan
Synchronization of a General Delayed Complex Dynamical Network via Adaptive Feedback Qunjiao Zhang and Junan Lu College of Mathematics and Statistics State Key Laboratory of Software Engineering Wuhan
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
IDENTIFICATION OF TARGET IMAGE REGIONS BASED ON BIFURCATIONS OF A FIXED POINT IN A DISCRETE-TIME OSCILLATOR NETWORK
 International Journal of Innovative Computing, Information and Control ICIC International c 203 ISSN 349-498 Volume 9, Number, January 203 pp. 355 363 IDENTIFICATION OF TARGET IMAGE REGIONS BASED ON BIFURCATIONS
International Journal of Innovative Computing, Information and Control ICIC International c 203 ISSN 349-498 Volume 9, Number, January 203 pp. 355 363 IDENTIFICATION OF TARGET IMAGE REGIONS BASED ON BIFURCATIONS
Complex balancing motions of an inverted pendulum subject to delayed feedback control
 Complex balancing motions of an inverted pendulum subject to delayed feedback control J. Sieber and B. Krauskopf Bristol Centre for Applied Nonlinear Mathematics, Department of Engineering Mathematics,
Complex balancing motions of an inverted pendulum subject to delayed feedback control J. Sieber and B. Krauskopf Bristol Centre for Applied Nonlinear Mathematics, Department of Engineering Mathematics,
Consider the following spike trains from two different neurons N1 and N2:
 About synchrony and oscillations So far, our discussions have assumed that we are either observing a single neuron at a, or that neurons fire independent of each other. This assumption may be correct in
About synchrony and oscillations So far, our discussions have assumed that we are either observing a single neuron at a, or that neurons fire independent of each other. This assumption may be correct in
HSND-2015, IPR. Department of Physics, University of Burdwan, Burdwan, West Bengal.
 New kind of deaths: Oscillation Death and Chimera Death HSND-2015, IPR Dr. Tanmoy Banerjee Department of Physics, University of Burdwan, Burdwan, West Bengal. Points to be discussed Oscillation suppression
New kind of deaths: Oscillation Death and Chimera Death HSND-2015, IPR Dr. Tanmoy Banerjee Department of Physics, University of Burdwan, Burdwan, West Bengal. Points to be discussed Oscillation suppression
Hopf Bifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators
 The Open Acoustics Journal 8 9-3 9 Open Access Hopf ifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators Jianping Cai *a and Jianhe Shen b a Department of
The Open Acoustics Journal 8 9-3 9 Open Access Hopf ifurcation Analysis and Approximation of Limit Cycle in Coupled Van Der Pol and Duffing Oscillators Jianping Cai *a and Jianhe Shen b a Department of
A comparison of delayed SIR and SEIR epidemic models
 Nonlinear Analysis: Modelling and Control, 2011, Vol. 16, No. 2, 181 190 181 A comparison of delayed SIR and SEIR epidemic models Abdelilah Kaddar a, Abdelhadi Abta b, Hamad Talibi Alaoui b a Université
Nonlinear Analysis: Modelling and Control, 2011, Vol. 16, No. 2, 181 190 181 A comparison of delayed SIR and SEIR epidemic models Abdelilah Kaddar a, Abdelhadi Abta b, Hamad Talibi Alaoui b a Université
Reduction of Conductance Based Models with Slow Synapses to Neural Nets
 Reduction of Conductance Based Models with Slow Synapses to Neural Nets Bard Ermentrout October 1, 28 Abstract The method of averaging and a detailed bifurcation calculation are used to reduce a system
Reduction of Conductance Based Models with Slow Synapses to Neural Nets Bard Ermentrout October 1, 28 Abstract The method of averaging and a detailed bifurcation calculation are used to reduce a system
BIFURCATIONS AND CHAOS IN A PERIODICALLY FORCED PROTOTYPE ADAPTIVE CONTROL SYSTEM 1
 KYBERNETIKA VOLUME 3 0 (1994), NUMBER 2, PAG ES 121-128 BIFURCATIONS AND CHAOS IN A PERIODICALLY FORCED PROTOTYPE ADAPTIVE CONTROL SYSTEM 1 YURI A. KUZNETSOV AND CARLO PICCARDI An adaptive control system
KYBERNETIKA VOLUME 3 0 (1994), NUMBER 2, PAG ES 121-128 BIFURCATIONS AND CHAOS IN A PERIODICALLY FORCED PROTOTYPE ADAPTIVE CONTROL SYSTEM 1 YURI A. KUZNETSOV AND CARLO PICCARDI An adaptive control system
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs
 BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
Research Article Chaos Control on a Duopoly Game with Homogeneous Strategy
 Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume 16, Article ID 74185, 7 pages http://dx.doi.org/1.1155/16/74185 Publication Year 16 Research Article Chaos Control on a Duopoly
Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume 16, Article ID 74185, 7 pages http://dx.doi.org/1.1155/16/74185 Publication Year 16 Research Article Chaos Control on a Duopoly
HOPF BIFURCATION CALCULATIONS IN DELAYED SYSTEMS
 PERIODICA POLYTECHNICA SER. MECH. ENG. VOL. 48, NO. 2, PP. 89 200 2004 HOPF BIFURCATION CALCULATIONS IN DELAYED SYSTEMS Gábor OROSZ Bristol Centre for Applied Nonlinear Mathematics Department of Engineering
PERIODICA POLYTECHNICA SER. MECH. ENG. VOL. 48, NO. 2, PP. 89 200 2004 HOPF BIFURCATION CALCULATIONS IN DELAYED SYSTEMS Gábor OROSZ Bristol Centre for Applied Nonlinear Mathematics Department of Engineering
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
Chapter 24 BIFURCATIONS
 Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Feedback-mediated oscillatory coexistence in the chemostat
 Feedback-mediated oscillatory coexistence in the chemostat Patrick De Leenheer and Sergei S. Pilyugin Department of Mathematics, University of Florida deleenhe,pilyugin@math.ufl.edu 1 Introduction We study
Feedback-mediated oscillatory coexistence in the chemostat Patrick De Leenheer and Sergei S. Pilyugin Department of Mathematics, University of Florida deleenhe,pilyugin@math.ufl.edu 1 Introduction We study
Research Article Mathematical Model and Cluster Synchronization for a Complex Dynamical Network with Two Types of Chaotic Oscillators
 Applied Mathematics Volume 212, Article ID 936, 12 pages doi:1.11/212/936 Research Article Mathematical Model and Cluster Synchronization for a Complex Dynamical Network with Two Types of Chaotic Oscillators
Applied Mathematics Volume 212, Article ID 936, 12 pages doi:1.11/212/936 Research Article Mathematical Model and Cluster Synchronization for a Complex Dynamical Network with Two Types of Chaotic Oscillators
Stochastic Wilson-Cowan equations for networks of excitatory and inhibitory neurons II
 Stochastic Wilson-Cowan equations for networks of excitatory and inhibitory neurons II Jack Cowan Mathematics Department and Committee on Computational Neuroscience University of Chicago 1 A simple Markov
Stochastic Wilson-Cowan equations for networks of excitatory and inhibitory neurons II Jack Cowan Mathematics Department and Committee on Computational Neuroscience University of Chicago 1 A simple Markov
Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model
 Letter Forma, 15, 281 289, 2000 Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model Yasumasa NISHIURA 1 * and Daishin UEYAMA 2 1 Laboratory of Nonlinear Studies and Computations,
Letter Forma, 15, 281 289, 2000 Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model Yasumasa NISHIURA 1 * and Daishin UEYAMA 2 1 Laboratory of Nonlinear Studies and Computations,
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
Stochastic Model for Adaptation Using Basin Hopping Dynamics
 Stochastic Model for Adaptation Using Basin Hopping Dynamics Peter Davis NTT Communication Science Laboratories 2-4 Hikaridai, Keihanna Science City, Kyoto, Japan 619-0237 davis@cslab.kecl.ntt.co.jp Abstract
Stochastic Model for Adaptation Using Basin Hopping Dynamics Peter Davis NTT Communication Science Laboratories 2-4 Hikaridai, Keihanna Science City, Kyoto, Japan 619-0237 davis@cslab.kecl.ntt.co.jp Abstract
Symmetries constrain dynamics in a family of balanced neural networks
 Symmetries constrain dynamics in a family of balanced neural networks A.K. Barreiro J.. Kutz E. Shlizerman September 24, 216 Abstract We examine a family of random firing-rate neural networks in which
Symmetries constrain dynamics in a family of balanced neural networks A.K. Barreiro J.. Kutz E. Shlizerman September 24, 216 Abstract We examine a family of random firing-rate neural networks in which
Krauskopf, B., Erzgraber, H., & Lenstra, D. (2006). Dynamics of semiconductor lasers with filtered optical feedback.
. Dynamics of semiconductor lasers with filtered optical feedback.") Krauskopf, B, Erzgraber, H, & Lenstra, D (26) Dynamics of semiconductor lasers with filtered optical feedback Early version, also known as pre-print Link to publication record in Explore Bristol Research
Krauskopf, B, Erzgraber, H, & Lenstra, D (26) Dynamics of semiconductor lasers with filtered optical feedback Early version, also known as pre-print Link to publication record in Explore Bristol Research
Torus Doubling Cascade in Problems with Symmetries
 Proceedings of Institute of Mathematics of NAS of Ukraine 4, Vol., Part 3, 11 17 Torus Doubling Cascade in Problems with Symmetries Faridon AMDJADI School of Computing and Mathematical Sciences, Glasgow
Proceedings of Institute of Mathematics of NAS of Ukraine 4, Vol., Part 3, 11 17 Torus Doubling Cascade in Problems with Symmetries Faridon AMDJADI School of Computing and Mathematical Sciences, Glasgow
Patterns, Memory and Periodicity in Two-Neuron Delayed Recurrent Inhibitory Loops
 Math. Model. Nat. Phenom. Vol. 5, No. 2, 2010, pp. 67-99 DOI: 10.1051/mmnp/20105203 Patterns, Memory and Periodicity in Two-Neuron Delayed Recurrent Inhibitory Loops J. Ma 1 and J. Wu 2 1 Department of
Math. Model. Nat. Phenom. Vol. 5, No. 2, 2010, pp. 67-99 DOI: 10.1051/mmnp/20105203 Patterns, Memory and Periodicity in Two-Neuron Delayed Recurrent Inhibitory Loops J. Ma 1 and J. Wu 2 1 Department of
Example of a Blue Sky Catastrophe
 PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
Handout 2: Invariant Sets and Stability
 Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
Finite-time hybrid synchronization of time-delay hyperchaotic Lorenz system
 ISSN 1746-7659 England UK Journal of Information and Computing Science Vol. 10 No. 4 2015 pp. 265-270 Finite-time hybrid synchronization of time-delay hyperchaotic Lorenz system Haijuan Chen 1 * Rui Chen
ISSN 1746-7659 England UK Journal of Information and Computing Science Vol. 10 No. 4 2015 pp. 265-270 Finite-time hybrid synchronization of time-delay hyperchaotic Lorenz system Haijuan Chen 1 * Rui Chen
Research Article On the Stability Property of the Infection-Free Equilibrium of a Viral Infection Model
 Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume, Article ID 644, 9 pages doi:.55//644 Research Article On the Stability Property of the Infection-Free Equilibrium of a Viral
Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume, Article ID 644, 9 pages doi:.55//644 Research Article On the Stability Property of the Infection-Free Equilibrium of a Viral
Reducing neuronal networks to discrete dynamics
 Physica D 237 (2008) 324 338 www.elsevier.com/locate/physd Reducing neuronal networks to discrete dynamics David Terman a,b,, Sungwoo Ahn a, Xueying Wang a, Winfried Just c a Department of Mathematics,
Physica D 237 (2008) 324 338 www.elsevier.com/locate/physd Reducing neuronal networks to discrete dynamics David Terman a,b,, Sungwoo Ahn a, Xueying Wang a, Winfried Just c a Department of Mathematics,
Phase Locking. 1 of of 10. The PRC's amplitude determines which frequencies a neuron locks to. The PRC's slope determines if locking is stable
 Printed from the Mathematica Help Browser 1 1 of 10 Phase Locking A neuron phase-locks to a periodic input it spikes at a fixed delay [Izhikevich07]. The PRC's amplitude determines which frequencies a
Printed from the Mathematica Help Browser 1 1 of 10 Phase Locking A neuron phase-locks to a periodic input it spikes at a fixed delay [Izhikevich07]. The PRC's amplitude determines which frequencies a
COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL PERIODIC FORCING TERMS
 International J. of Math. Sci. & Engg. Appls. (IJMSEA) ISSN 0973-9424, Vol. 9 No. III (September, 2015), pp. 197-210 COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL
International J. of Math. Sci. & Engg. Appls. (IJMSEA) ISSN 0973-9424, Vol. 9 No. III (September, 2015), pp. 197-210 COMPLEX DYNAMICS AND CHAOS CONTROL IN DUFFING-VAN DER POL EQUATION WITH TWO EXTERNAL
Elements of Applied Bifurcation Theory
 Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
DESYNCHRONIZATION TRANSITIONS IN RINGS OF COUPLED CHAOTIC OSCILLATORS
 Letters International Journal of Bifurcation and Chaos, Vol. 8, No. 8 (1998) 1733 1738 c World Scientific Publishing Company DESYNCHRONIZATION TRANSITIONS IN RINGS OF COUPLED CHAOTIC OSCILLATORS I. P.
Letters International Journal of Bifurcation and Chaos, Vol. 8, No. 8 (1998) 1733 1738 c World Scientific Publishing Company DESYNCHRONIZATION TRANSITIONS IN RINGS OF COUPLED CHAOTIC OSCILLATORS I. P.
Bursting and Chaotic Activities in the Nonlinear Dynamics of FitzHugh-Rinzel Neuron Model
 Bursting and Chaotic Activities in the Nonlinear Dynamics of FitzHugh-Rinzel Neuron Model Abhishek Yadav *#, Anurag Kumar Swami *, Ajay Srivastava * * Department of Electrical Engineering, College of Technology,
Bursting and Chaotic Activities in the Nonlinear Dynamics of FitzHugh-Rinzel Neuron Model Abhishek Yadav *#, Anurag Kumar Swami *, Ajay Srivastava * * Department of Electrical Engineering, College of Technology,
Fast neural network simulations with population density methods
 Fast neural network simulations with population density methods Duane Q. Nykamp a,1 Daniel Tranchina b,a,c,2 a Courant Institute of Mathematical Science b Department of Biology c Center for Neural Science
Fast neural network simulations with population density methods Duane Q. Nykamp a,1 Daniel Tranchina b,a,c,2 a Courant Institute of Mathematical Science b Department of Biology c Center for Neural Science
The Mixed States of Associative Memories Realize Unimodal Distribution of Dominance Durations in Multistable Perception
 The Mixed States of Associative Memories Realize Unimodal Distribution of Dominance Durations in Multistable Perception Takashi Kanamaru Department of Mechanical Science and ngineering, School of Advanced
The Mixed States of Associative Memories Realize Unimodal Distribution of Dominance Durations in Multistable Perception Takashi Kanamaru Department of Mechanical Science and ngineering, School of Advanced
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
Homoclinic saddle to saddle-focus transitions in 4D systems
 Faculty of Electrical Engineering, Mathematics & Computer Science Homoclinic saddle to saddle-focus transitions in 4D systems Manu Kalia M.Sc. Thesis July 2017 Assessment committee: Prof. Dr. S. A. van
Faculty of Electrical Engineering, Mathematics & Computer Science Homoclinic saddle to saddle-focus transitions in 4D systems Manu Kalia M.Sc. Thesis July 2017 Assessment committee: Prof. Dr. S. A. van
Analysis of stability for impulsive stochastic fuzzy Cohen-Grossberg neural networks with mixed delays
 Analysis of stability for impulsive stochastic fuzzy Cohen-Grossberg neural networks with mixed delays Qianhong Zhang Guizhou University of Finance and Economics Guizhou Key Laboratory of Economics System
Analysis of stability for impulsive stochastic fuzzy Cohen-Grossberg neural networks with mixed delays Qianhong Zhang Guizhou University of Finance and Economics Guizhou Key Laboratory of Economics System
NBA Lecture 1. Simplest bifurcations in n-dimensional ODEs. Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011
 March 14, 2011") NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
Andronov Hopf and Bautin bifurcation in a tritrophic food chain model with Holling functional response types IV and II
 Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Problem Set Number 02, j/2.036j MIT (Fall 2018)
") Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Behaviour of simple population models under ecological processes
 J. Biosci., Vol. 19, Number 2, June 1994, pp 247 254. Printed in India. Behaviour of simple population models under ecological processes SOMDATTA SINHA* and S PARTHASARATHY Centre for Cellular and Molecular
J. Biosci., Vol. 19, Number 2, June 1994, pp 247 254. Printed in India. Behaviour of simple population models under ecological processes SOMDATTA SINHA* and S PARTHASARATHY Centre for Cellular and Molecular
Chapter 3. Gumowski-Mira Map. 3.1 Introduction
 Chapter 3 Gumowski-Mira Map 3.1 Introduction Non linear recurrence relations model many real world systems and help in analysing their possible asymptotic behaviour as the parameters are varied [17]. Here
Chapter 3 Gumowski-Mira Map 3.1 Introduction Non linear recurrence relations model many real world systems and help in analysing their possible asymptotic behaviour as the parameters are varied [17]. Here
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Analysis of Bifurcations in a Power System Model with Excitation Limits
 Analysis of Bifurcations in a Power System Model with Excitation Limits Rajesh G. Kavasseri and K. R. Padiyar Department of Electrical Engineering Indian Institute of Science, Bangalore, India Abstract
Analysis of Bifurcations in a Power System Model with Excitation Limits Rajesh G. Kavasseri and K. R. Padiyar Department of Electrical Engineering Indian Institute of Science, Bangalore, India Abstract
Computation with phase oscillators: an oscillatory perceptron model
 Computation with phase oscillators: an oscillatory perceptron model Pablo Kaluza Abteilung Physikalische Chemie, Fritz-Haber-Institut der Max-Planck-Gesellschaft, Faradayweg 4-6, 495 Berlin, Germany. Abstract
Computation with phase oscillators: an oscillatory perceptron model Pablo Kaluza Abteilung Physikalische Chemie, Fritz-Haber-Institut der Max-Planck-Gesellschaft, Faradayweg 4-6, 495 Berlin, Germany. Abstract
The Invariant Curve in a Planar System of Difference Equations
 Advances in Dynamical Systems and Applications ISSN 0973-5321, Volume 13, Number 1, pp. 59 71 2018 http://campus.mst.edu/adsa The Invariant Curve in a Planar System of Difference Equations Senada Kalabušić,
Advances in Dynamical Systems and Applications ISSN 0973-5321, Volume 13, Number 1, pp. 59 71 2018 http://campus.mst.edu/adsa The Invariant Curve in a Planar System of Difference Equations Senada Kalabušić,
7 Two-dimensional bifurcations
 7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model
 2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model Chunhua Yuan 1, Jiang Wang 2 School of Electrical Engineering and Automation, Tianjin University, Tianjin, China 2
2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model Chunhua Yuan 1, Jiang Wang 2 School of Electrical Engineering and Automation, Tianjin University, Tianjin, China 2
Coherence of Noisy Oscillators with Delayed Feedback Inducing Multistability
 Journal of Physics: Conference Series PAPER OPEN ACCESS Coherence of Noisy Oscillators with Delayed Feedback Inducing Multistability To cite this article: Anastasiya V Pimenova and Denis S Goldobin 2016
Journal of Physics: Conference Series PAPER OPEN ACCESS Coherence of Noisy Oscillators with Delayed Feedback Inducing Multistability To cite this article: Anastasiya V Pimenova and Denis S Goldobin 2016
Numerical techniques: Deterministic Dynamical Systems
 Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
A Mathematical Study of Electrical Bursting in Pituitary Cells
 A Mathematical Study of Electrical Bursting in Pituitary Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Collaborators on
A Mathematical Study of Electrical Bursting in Pituitary Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Collaborators on
STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS
 International Journal of Bifurcation and Chaos, Vol 9, No 11 (1999) 19 4 c World Scientific Publishing Company STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS ZBIGNIEW
International Journal of Bifurcation and Chaos, Vol 9, No 11 (1999) 19 4 c World Scientific Publishing Company STUDY OF SYNCHRONIZED MOTIONS IN A ONE-DIMENSIONAL ARRAY OF COUPLED CHAOTIC CIRCUITS ZBIGNIEW
Application demonstration. BifTools. Maple Package for Bifurcation Analysis in Dynamical Systems
 Application demonstration BifTools Maple Package for Bifurcation Analysis in Dynamical Systems Introduction Milen Borisov, Neli Dimitrova Department of Biomathematics Institute of Mathematics and Informatics
Application demonstration BifTools Maple Package for Bifurcation Analysis in Dynamical Systems Introduction Milen Borisov, Neli Dimitrova Department of Biomathematics Institute of Mathematics and Informatics