CHAPTER V TYPE 2 FUZZY LOGIC CONTROLLERS
|
|
|
- Cameron Small
- 5 years ago
- Views:
Transcription
1 CHAPTER V TYPE 2 FUZZY LOGIC CONTROLLERS In the last chapter fuzzy logic controller and ABC based fuzzy controller are implemented for nonlinear model of Inverted Pendulum. Fuzzy logic deals with imprecision, and vagueness, but not uncertainty. In the present chapter the uncertainties in the nonlinear model of Inverted pendulum are considered.type2 fuzzy logic helps to model and to minimize the effects of uncertainties in rule based Fuzzy logic system, and thereafter ABC algorithm has been proposed to optimize the variables of Inverted Pendulum to get the optimum value. Performance analysis of IT2 fuzzy controller and ABC algorithm based IT2 fuzzy controllers are compared at the end of the chapter. 5.1 INTRODUCTION When a system has considerably large sureness, Type 1 Fuzzy Logic Controller (T1FLC) are unable to attain the desired level of performance with a rational complexity of the structure. In such cases, the use of Type 2 Fuzzy Logic Controller (T2FLC) is advised as the favorable FLC in the studies in areas, such as forecasting of time-series, controlling of mobile robots, the truck backing-up control problem, Very Large Scale Integration (VLSI) and Field Programmable Logic Devices (FPGA).Executions of T2FLC reveals that when the parameters are appropriately adjusted, T2FLC can result in a better ability to predict as compared to T1FLC [Liang Q and Mendel J. M (2000)]. For machines like real time mobile robots, T2FLCs are most suitable application. For the case of real time implementation, literature survey shows that a conventional T1FLCs are unable to handle the uncertainties in the system efficiently and a T2FLC using type- 2 fuzzy sets results in a better performance. Also, by using T2FLC the quantity of regulations to be determined also reduces although the parameters to be determined do not get reduced. In the year 1975, Zadeh gave the concept of Type-2 fuzzy sets. These type-2 Fuzzy sets were a mere extension of type-1 fuzzy sets. A Fuzzy Logic Set described using at least one type-2 fuzzy set is called a type-2 FLS.Type-2 FLSs are useful to measure uncertainties. Type-2 fuzzy set help to model and to minimize the effects of uncertainties in rule-based FLS. 112

2 The theory of Type-2 fuzzy sets was further evolved by Mendel and Karnik. Type-2 Fuzzy Logic sets seems to be a more favorable method than their type-1 counterparts in cases of handling uncertainties like noise in data and changes in environmental conditions. When the effects of the measurement of noise in type-1 and type-2 FLS were compared, it was concluded that the use of T2FLS in practical applications which reveal measurement noise and modeling uncertainties is a better option than type-1 FLS. Usually, Fuzzy logic is a nonlinear mapping of an input data vector into a scalar output and the primary mechanism for doing this is a list of if-then statements called rules. All rules are evaluated in parallel, and the order of the rules is unimportant. The rules themselves are useful because they refer to variables and the adjectives that describe those variables. Before a system is built that interprets rules, all the terms which are to be used and the adjectives that describe them need to be defined. 5.2 ARCHITECTURE OF TYPE-2 FUZZY LOGIC SYSTEMS Hagras, H. (2007) presented that Type-2 fuzzy sets are finding very wide applicability in rulebased fuzzy logic systems (FLSs) because they let uncertainties be modeled by them whereas such uncertainties cannot be modeled by Type-1 fuzzy sets. A block diagram of a Type-2 Fuzzy Logic System (T2FLS) is described in Figure 5.1. Figure 5.1: Block diagram of Type-2 Fuzzy Logic System 113
3 In the block diagram, there is an extra block - type reducer, which is not present in Type-1 FLS but is needed in Type-2 FLS design. Though the Type 2 FLS has some advantages when dealing with uncertainties, but it also increases the mathematical calculation. The blocks of Type 2 FLS are as: a) Fuzzifier: The fuzzifier maps crisp inputs into Type-2 fuzzy sets which activates the inference engine. b) Rule base: The rules in a T2FLS and T1FLS are same, but antecedents and consequents are represented by Type-2 fuzzy sets. c) Inference: Inference block assigns fuzzy inputs to fuzzy outputs using the rules in the rule base and the operators such as union and intersection. In type-2 fuzzy sets, join ( ) and meet operators ( ), which are new concepts in fuzzy logic theory, are used instead of union and intersection operators. These two new operators are used in secondary membership functions. d) Type-reduction: The Type-2 fuzzy outputs of the inference engine are transformed into Type- 1 fuzzy sets that are called the type-reduced sets. There are two common methods for the typereduction operation in the T2FLSs: One is the Karnik- Mendel iteration algorithm, and the other is Wu-Mendel uncertainty bounds method. There are as many type-reduction methods as there are type-1 defuzzification methods. An algorithm developed by Karnik and Mendel now known as the KM Algorithm is used for type-reduction. Although this algorithm is iterative, it is very fast. These two methods are based on the calculation of the centroid. e) Defuzzification: The second step of output processing, which occurs after type-reduction, is still called defuzzification. Because a type-reduced set of an Interval type-2 fuzzy set is always a finite Interval of numbers, the defuzzified value is just the average of the two end-points of this Interval. The outputs of the type reduction block are given to defuzzificaton block. The typereduced sets are determined by their left end point and right end point, the defuzzified value is calculated by the average of these points. In a Type-1 FLS, output processing, called defuzzification, maps a type-1 fuzzy set into a number. There are many ways for doing this, e.g., 114
4 by computing the union of the fired-rule output fuzzy sets (the result is another type-1 fuzzy set) and then computing the center of gravity of the membership function for that set; computing a weighted average of the center of gravities of each of the fired rule consequent membership functions; etc. Things are somewhat more complicated for a Type-2 FLS, because to go from a Type-2 fuzzy set to a number (usually) requires two steps as shown in Figure 5.1. The first step, called typereduction, is where a type-2 fuzzy set is reduced to a type-1 fuzzy set. In most engineering applications of a FLS, a number and not a fuzzy set is needed as its final output, e.g., the consequent of the rule given above is "Rotate the valve a bit to the right." No automatic valve will know what this means because "a bit to the right" is a linguistic expression, and a valve must be turned by numerical values, i.e. by a certain number of degrees. Consequently, the fired-rule output fuzzy sets have to be converted into a number, and this can be done in the Figure 5.1 Output Processing block. It is clear from Figure 5.1 that there can be two outputs to a type-2 FLS which are crisp numerical values and the type-reduced set. The latter provides a measure of the uncertainties that have flowed through the Interval type-2 FLS, due to the uncertain input measurements that have activated rules whose antecedents or consequents or both are uncertain. As standard deviation is widely used in probability and statistics to provide a measure of unpredictable uncertainty about a mean value, the type-reduced set can provided a measure of uncertainty about the crisp output of a type-2 FLS. 5.3 TYPE 2 FUZZY LOGIC SYSTEMS (FLS) BASED ON MEMBERSHIP FUNCTIONS As there are two main approaches to design a Fuzzy logic controller in literature: (i) Using Type-1 fuzzy sets: Membership functions are totally certain.type-1 fuzzy set is already been studied in chapter 4. Type-1 fuzzy set A which is in terms of a single 115
5 variable, x X, may be represented as: Where denotes union over all admissible x. As can be seen from Figure 5.2, a type-1 Gaussian membership function, μa(x), is constrained to be between 0 and 1 for all x X, and is a two-dimensional function. This type of membership function does not contain any uncertainty. In other words, there exists a clear membership value for every input data point. Figure 5.2: A Gaussian type-1 fuzzy membership function (ii) Using Type-2 fuzzy sets: Membership functions that are themselves fuzzy. This results in the antecedents and consequents of the rules to be uncertain, [Duan Ji''an, Zhou Haibo and Ying Hao (2009)]. If the circumstances are so fuzzy, the places of the membership functions may not be determined precisely. In such cases, the membership grade cannot be determined as a crisp number in [0, 1], then the use of 116
6 type-2 fuzzy sets might be a preferable option. A type-2 fuzzy set, Ã, may be represented as: In equation (5.4) Jx is called primary membership of x. Additionally, there is a secondary membership value corresponding to each primary membership value that defines the possibility for primary memberships. Whereas the secondary membership functions can take values in the Interval of [0,1] in generalized T2FLSs, they are uniform functions that only take on values of 1 in Interval T2FLSs which is described in next section. If the standard deviation of the Gaussian function in Figure 5.2 is blurred, Figure 5.3 can be obtained. In Figure 5.3, the membership function does not have a single value for a specific value of x. The values that the vertical line intersects the membership functions do not need all be weighted same. Moreover, an amplitude distribution can be assigned to all of those points. Hence, a three-dimensional membership function that characterizes a type-2 fuzzy set is created if the amplitude distribution operation is done for all x X [2]. In order to symbolically distinguish between a type-1 fuzzy set and a type-2 fuzzy set, a tilde symbol is put over the symbol for the fuzzy set; so, A denotes a type-1 fuzzy set, whereas à denotes the comparable type-2 fuzzy set. When the latter is done, the resulting type-2 fuzzy set is called a general type-2 fuzzy set to distinguish it from the special Interval type-2 fuzzy set. 117
 Further Type 2 Fuzzy logic systems are of two types i) General Type2 fuzzy logic controller ii) Interval type 2 fuzzy logic controller Rule-based")
7 Figure 5.3: A Gaussian type-2 Fuzzy Membership Function (FOU) Further Type 2 Fuzzy logic systems are of two types i) General Type2 fuzzy logic controller ii) Interval type 2 fuzzy logic controller Rule-based FLC is used for an Interval type-2 FLC, as they are the most popular kind of type-2 FLC. This kind of FLS is used in fuzzy logic control, fuzzy logic signal processing, rule-based classification, etc., and is sometimes referred to as a function approximation application of fuzzy sets, because the FLC is designed to minimize an error function. As the computations in General T2FLS are complex and hence Intervals T2FLSs are commonly used in literature. Both the General and Interval type-2 fuzzy membership functions are threedimensional. The only difference between them is that the secondary membership value of the Interval type-2 membership function is always equal to 1, which means that no new information is contained in the third dimension of an Interval type-2 fuzzy set. So, for such a set, the third dimension is ignored, and only the FOU (Figure 5.4) is used to describe it. It is for this reason that an Interval type-2 fuzzy set is sometimes called a first-order uncertainty fuzzy set model, whereas a General type-2 fuzzy set with its useful third-dimension is sometimes referred to as a second-order uncertainty fuzzy set model. 118

8 Figure 5.4: Footprint of Uncertainty for an Interval Type-2 fuzzy set When all μ (x, u) are equal to 1, then A is an Interval T2FLS. The special case of equation 5.5 might be defined for the Interval T2FLSs Rules, are either provided by subject experts or are extracted from numerical data, and are expressed as a collection of IF-THEN statements, e.g., if temperature is moderate and pressure is high, then rotate the valve a bit to the right. Fuzzy sets are associated with the terms that appear in the antecedents (IF-part) or consequents (THEN-part) of rules, and with the inputs to and the outputs of the FLS. An Interval type-2 FLS lets any one or all of the following kinds of uncertainties to be quantified: Words that are used in antecedents and consequents of rules because words can mean different things to different people. Uncertain consequents-because when rules are obtained from a group of experts, consequents will often be different for the same rule, i.e. the experts will not necessarily be in agreement. Membership function parameters-because when those parameters are optimized using uncertain (noisy) training data, the parameters become uncertain. 119
9 Noisy measurements because very often it is such measurements that activate the FLS. Noisy, but the noise is stationary, they are modeled as a type-1 fuzzy set, and, Noisy, but the noise is non-stationary, they are modeled as an Interval type-2 fuzzy set. 5.4 COMPARISON OF TYPE1, GENERAL TYPE 2 AND INTERVAL TYPE-2 MEMBERSHIP FUNCTIONS Conceptually, type-2 fuzzy sets introduced by Zadeh s main appeal are the notion that while type-1 fuzzy sets allow for a fuzzy representation of a term to be made. The membership function of a type-1 set is crisp means that the degrees of membership derived from the specified set are completely crisp not fuzzy. If there is uncertainty about a specific quantity, type-2 sets can be used to avoid a crisp membership function and result in degrees of membership which are themselves fuzzy. Although, even type-2 MFs are crisply defined in three dimensions and that type-infinity sets is required to account completely for uncertainty. The focus here is on the three types of sets mentioned and in particular on the way they represent degrees of membership. In Figure 5.5, the same input p is applied to the three different types of fuzzy sets (type-1 fuzzy set in Figure 5.5(a), Interval type-2 fuzzy set in Figure 5.5(b) and General type-2 fuzzy set in Figure 5.5(c), resulting in a degree of membership which is specific to the type of fuzzy set. The amount of uncertainty (and the distribution) that is associated with the degree is shown in color in Figure 5.5 and is explained in Figure 5.6. It shows the secondary Membership Functions (third dimension) of the type-1 fuzzy set Figure 5.6(a), the Interval type- 2 fuzzy set Figure 5.6(b) and the General type-2 fuzzy set Figure 5.6(c) as induced by the same input p as shown in Figure 5.6. It is to be noted that Figure 5.6 is visualizing the y-z plane. 120
 induced by an input p for (a) Type-1 fuzzy set. (b) Interval Type-2 fuzzy set (c) General type-2 sets. As shown in Figure 5.")
10 Figure 5.5: An example of the three types of fuzzy sets. The same input p is applied to each fuzzy set. (a) Type-1 fuzzy set. (b) Interval type-2 fuzzy set. (c) General type-2 fuzzy set. Figure 5.6: A view of the secondary membership functions (third dimensions) induced by an input p for (a) Type-1 fuzzy set. (b) Interval Type-2 fuzzy set (c) General type-2 sets. As shown in Figure 5.6, the secondary Membership Function in type-1 fuzzy sets has only one value in its domain (a in Figure 5.6a) corresponding to the primary membership value at which the secondary grade equals 1. Hence, in type-1 fuzzy sets, for each x value (in our case p), there is no uncertainty associated with the primary membership value [Mendel 2001]. In Interval type- 121
11 2 fuzzy sets as shown in Figure 5.6(b), there is maximum uncertainty associated with the secondary membership function as the primary membership is taking values within the Interval [a, b], where each point in this Interval is having an associated secondary membership of 1. In general type-2 fuzzy sets as shown in Figure 5.6(c), the uncertainty (represented by the secondary membership function) can be modeled with any degree between type-1 and Interval type-2 fuzzy sets, for example by the triangular secondary membership function shown in Figure 5.6(c). Overall, it can be noted that general type-2 fuzzy sets can model the uncertainty in the third dimension from nearly no uncertainty (i.e. type-1) to maximum (i.e. Interval type-2, where the uncertainty is equally spread in the third dimension). 5.5 INTERVAL TYPE-2 FUZZY INFERENCE SYSTEMS In the present work Interval type 2 fuzzy sets and systems are used. So main focus is on Interval Type2 fuzzy sets only. Interval Type-2 Fuzzy inference is the process of formulating the mapping from a given input to an output using Interval type-2 fuzzy logic. The mapping then provides a basis from which decisions can be made, or patterns discerned. There are two types of fuzzy inference systems that can be implemented in the Interval Type-2 Fuzzy Logic Toolbox: Mamdani-type and Sugeno-type. These two types of inference systems vary somewhat in the way outputs are determined. Interval Type-2 Fuzzy inference systems have been successfully applied in fields such as automatic control, data classification, decision analysis, expert systems, and computer vision. Because of its multidisciplinary nature, Interval type-2 fuzzy inference systems are associated with a number of names, such as Interval type-2 fuzzy-rule-based systems, Interval type-2 fuzzy expert systems, Interval type-2 fuzzy modeling, Interval type-2 fuzzy associative memory, Interval type-2 fuzzy logic controllers, and simply (and ambiguously) Interval type-2 fuzzy systems. Mamdani s type-1 fuzzy inference method is the most commonly seen type-1 fuzzy methodology. Mamdani s method was among the first control systems built using type-1 fuzzy set theory. 122
12 Mamdani-type Interval type-2 fuzzy inference, as it is defined for the Interval Type-2 Fuzzy Logic Toolbox, expects the output Interval type-2 membership functions to be Interval type-2 fuzzy sets. After the aggregation process, there is a Interval type-2 fuzzy set for each output variable that needs type-reduction and defuzzification. It is possible, and in many cases much more efficient, to use a single spike as the output Interval type-2 membership function rather than a distributed Interval type-2 fuzzy set. This is sometimes known as a singleton output Interval type-2 membership function, and it can be thought of as a pre-type reduction and defuzzified Interval type-2 fuzzy set. It enhances the efficiency of the type-reduction and defuzzification process because it greatly simplifies the computation required by the more general Mamdani method, which finds the centroid of a two- dimensional function. Rather than integrating across the two-dimensional function to find the centroid, we use the weighted average of a few data points. In general, Sugeno-type systems can be used to model any Interval type-2 inference system in which the output Interval type-2 membership functions are either linear or constant. Information flows from two inputs to a single output. The parallel nature of the rules is one of the more important aspects of Interval type-2 fuzzy logic systems. Instead of sharp switching between modes based on breakpoints, there is smooth glide from regions where the system s behavior is dominated by either one rule or another. In the Interval Type-2 Fuzzy Logic Toolbox, there are five parts of the Interval type-2 fuzzy inference process - fuzzification of the input variables, application of the Interval type-2 fuzzy operator (AND or OR) in the antecedent, implication from the antecedent to the consequent, aggregation of the consequents across the rules, type-reduction and defuzzification. The Interval type-2 fuzzy inference diagram is the composite of all the smaller diagrams. It simultaneously displays all parts of the Interval type-2 fuzzy inference process which are to be examined. Information flows through the Interval type-2 fuzzy inference diagram as shown in Figure

13 Figure 5.7 Fuzzy Inference Diagram The flow proceeds up from the inputs in the lower left, then across each row, or rule, and then down the rule outputs to finish in the lower right. This is a very compact way of showing everything at once, from linguistic variable fuzzification all the way through type-reducer defuzzification of the aggregate output. 5.6 STRUCTURE OF IT2 FLS CONTROLLER As Interval Type 2 fuzzy logic system includes fuzzifier, rule base, inference engine, type reductions and defuzzifier. In the IT2FLS, the rule base part enclosed with antecedents and consequents parts and each rule inference output is a type-2 fuzzy set. The membership function limits are chosen with the help of the optimal velocity and the optimal angle. It is used for reducing footprint of uncertainties (FOU). A uniform weighting is supposed to symbolize a FOU since the mean changeable between m1 and m2, the Gaussian function is measured with a standard deviation. The structure of the proposed IT2FLS is given in Figure
14 Figure 5.8: Structure of IT2FLS Controller There are five phases of structure of IT2FLS Controller as shown in Figure 5.8. Phase1: Fuzzification It is the first step of the IT2FLS, in which the crisp parameters of input and are converted and fuzzified into input Interval type-2 fuzzy sets. In fuzzification, the change of angle and change of velocity are mapped to the linguistic labels of fuzzy sets. The membership functions of these fuzzy sets contain two inputs and one output. Here, the input vector is X x x,... and the ifthen rules are specified in the following, i i i Rl i If x1 is P 1 AND x2 is P AND xn is Pn i THEN Y is ai (5.6) i 1, 2 x n Where, i P j are the antecedents and j 1,2,3... n is the consequent of the i th rule. Then the Gaussian membership function (MF) is used which has a fixed standard deviation (SD) and uncertain mean that takes in the values in m m. The uncertainty of this membership functions can be j1, j2 represented in the bounded Interval in terms of upper MF and lower MF. The Gaussian membership functions with uncertain mean described as, 125
15 Where, m m m and j 1,2,3... n, is the number of antecedents. Then the i 1,2,3... r, is the i j j1, j2 number of rules. Then the upper and lower MF s are specified as ji(upper) and ji(lower) respectively and described in the equation (14) and (15). and Where, the output of the each node is represented as in the lower and upper Interval. Phase 2: Rule base system Here, by generating the rule the fuzzy meet operation is done. For each node, two rules are generated by adding the upper membership functions separately and lower membership function separately. The output of a rule node is a firing strength firing strength is computed as follows, i F f lower, f upper (5.10) i i n Where, f upper upper (5.11) i j 1 i j i FS, which is an IT2 fuzzy set. The f i n lower lower (5.12) j 1 i j Phase 3: Inference Engine Once the firing strength is obtained, the inference engine and the rule base are activated by the Interval type-2 fuzzy sets to produce output. Then the input Interval type-2 fuzzy sets and output 126
16 Interval type-2 are mapped by combining the fired rules using inference engine. Then outcome of the inference engine are processed by the type-reducer. The type-reducer combines the output sets and performs a centroid calculation which leads to type-1 fuzzy sets called the type-reduced sets. Phase 4: Type Reductions The type reduced set of the Interval type-2 FS is an Interval type1 set which contains the left limit yl and right limit yr. The Interval output of this layer is computed by each node present in this layer. The consequent is a crisp value. Here we used a simplified type-2 reduction operation instead of the center-of-sets type reduction method. It considers only two embedded type-1 fuzzy sets with membership values, that is the outputs and are computed as follows, M fi lower ai q y i M fi lower i 1 1 (5.13) M fi upper a i s y i M fi upper i 1 1 (5.14) After the type-reduction process, the type-reduced sets are then defuzzified. Phase 5: Defuzzification It is the last process of the IT2FLS where each output node corresponds to one output variable. Due to the output layer of an Interval set, each and every node performs defuzzification process. The defuzzified output is denoted by y which is determined by taking the average of the nodes q y and y s. y q s y y 2 (5.15) Subsequently the obtained defuzzified control output of fuzzy system is given to inverted pendulum to reduce the deviations of the angle and the velocity of the pendulum and also the 127
17 position of the pendulum are maintained that was close to the reference position [Tahir A and Yasin J (2012)]. 5.7 SIMULINK STUDY OF TYPE 2 FUZZY CONTROLLER Consider the nonlinear model of Inverted Pendulum (refer equations derived in Chapter 3) ( )x x ( ) ( ) x ( ) By taking numerical values of various parameters as M=0.455kg, m=0.21 kg, l=0.61/2m, g=9.8m/s 2,I= kg.m 2 [Akole Mohan and Tyagi Barjeev (2008)]. An IT2 fuzzy controller is applied for controlling the velocity and angle of the Inverted Pendulum. The control action of IT2 fuzzy depends on the change of angle and the change of velocity of the pendulum. The change in angle is calculated by difference between the current and previous error. Similarly, the change of velocity of the pendulum is also evaluated. The IT2 fuzzy controller is implemented in MATLAB/Simulink working platform. The input to the IT2 fuzzy controller is change of velocity and change of angle of the pendulum. The Simulink configuration of the fuzzy controller is illustrated in Figure 5.9. Figure 5.9: Configuration of Inverted Pendulum with IT2 fuzzy controller 128

18 Upon opening the Surface Viewer, a three -dimensional curve is presented that represents the control surface. The entire mapping is shown in one plot in Figure Figure 5.10: Surface viewer of Interval Type -2 FIS The performances of cart position and pendulum angle with IT2fuzzy controller are depicted in Figures 5.11 and 5.12 respectively. The pendulum velocity is shown in Figure Figure 5.11: Performance of cart position using IT2FLS 129
19 Figure 5.12: Performance of pendulum angle using IT2 FLS Figure 5.13: Performance of pendulum velocity using IT2 FLS 5.8 SIMULINK STUDY OF ABC IT2FUZZY CONTROLLER The change of angle and change of velocity are optimized by ABC algorithm (explained in chapter 4) and the optimized membership function is generated based on the output of ABC algorithm. The structure of proposed fuzzy controller with the ABC algorithm is described in Figure The input to fuzzy controller is optimized change of angle and change of velocity with minimum deviation. The output of ABC-IT2 fuzzy controller is applied to the pendulum for controlling the angle and velocity. Then, the angle and velocity of the pendulum is examined 130

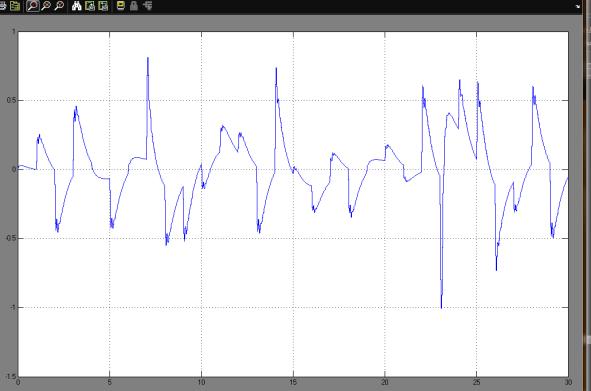
20 after applying the ABC-IT2 fuzzy controller. The examined performance of cart position and pendulum angle is given in Figures 5.15 and Figure 5.17 depicts the performance of pendulum velocity. Figure 5.14: Structure of proposed ABC IT2 Fuzzy control model Figure 5.15: Performance of cart position after applying ABC IT2 Fuzzy controller 131
21 Figure 5.16: Performance of pendulum angle after applying ABC IT2 Fuzzy controller Figure 5.17: Performance of pendulum velocity after applying ABC IT2 Fuzzy controller 132
22 5.9 COMPARISON OF IT2 AND ABC TYPE2 FUZZY CONTROLLER In this section, the simulation results of the IT2 and ABC Type2 Fuzzy controller, which are performed on the model of an Inverted Pendulum (equations 5.21 and 5.22) are compared. Comparative analysis of both control strategies on the system performance is discussed in this section. Comparative analysis of Type1 fuzzy and Type2 fuzzy controller with disturbance are also discussed. It is noted that the overshoot is lesser in case of ABC based IT2 fuzzy controller. Table 5.1 and 5.2 give the summary of performance characteristics for cart position and pendulum angle in terms of its time domain specifications. The performance of cart position with IT2Fuzzy and ABC-IT2Fuzzy controller is shown in Figure The settling time of the ABC IT2 Fuzzy controller is 2.98s. The settling time of the IT2FLS is denoted as 3s. So ABC IT2 fuzzy controller has also lesser settling time than IT2 Fuzzy Controller. Figure 5.18: Comparison performance of cart position of ABC Fuzzy, IT2-Fuzzy controller and ABCIT2 Fuzzy controller 133
23 Table 5.1 Summary of the performance characteristics for cart position for IT2 and ABC fuzzy controller Time domain Specifications IT2Fuzzy Controller ABC IT2 Fuzzy controller Settling Time(s) Rise Time(s) 2.1s 2 Steady State Error(e ss ) 0 0 Table 5.2 Summary of the performance characteristics for pendulum angle for IT2 and ABC fuzzy controller Time domain Specifications IT2Fuzzy Controller ABC IT2 Fuzzy controller Settling Time(s) 3.2s 3s Steady State Error(e ss ) 0 0 Percent Overshoot (%) PERFORMANCE OF ABC IT2 FUZZYCONTROLLER IN PRESENCE OF NOISE With the latest developments in Interval type-2 FLCs, it can be seen that type-2 FLCs overcome the limitations of type-1 FLCs and present a way forward to fuzzy control, especially in environments faced with a large amount of uncertainty, which includes most of the real-world applications. A short duration pulse with random disturbance is superimposed with the control input. The schematic diagram of this system is shown in Figure The performance of cart position and pendulum angle obtained with this disturbance using ABC IT2 fuzzy controller are shown in Figures.5.20 and


24 Figure 5.19: Schematic diagram when a short duration pulse is superposed with control input Figures 5.20 and 5.21 shows the response for short disturbance using IT2 fuzzy controller for cart position and pendulum angle. (a) (b) Figure 5.20: Performance in the presence of short disturbance of 0.6 magnitude for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller 135


25 (a) (b) Figure 5.21: Performance in the presence of short disturbance of 0.8 magnitude for cart position (a) and pendulum angle (b) using ABC IT2 fuzzy Controller From Tables 5.3 and 5.4 it can be seen that overshoot is rising for cart position and pendulum with increase in magnitude but in comparison to fuzzy controller it has lesser value. Table 5.3 Summary of the performance characteristics for cart position with short disturbance for ABC IT2 Fuzzy and ABC Fuzzy controller Time response specifications With 0.8 magnitude ABC IT2 Fuzzy ABC Fuzzy Controller Controller With 0.6 magnitude ABC IT2 Fuzzy ABC Fuzzy Controller Controller Overshoot (%) Steady state error Settling time(sec)
 10 11 9 11 Steady state error 0 0 0 0 Settling time(sec) 10")
 (b) Figure 5.22: Performance in the presence of white noise of 0.")
26 Table 5.4 Summary of the performance characteristics for pendulum s angle under short duration disturbance for ABC IT2 Fuzzy and ABC Fuzzy controller Time response With 0.8 magnitude With 0.6 magnitude specifications ABC IT2 Fuzzy Controller ABC Fuzzy Controller ABC IT2 Fuzzy Controller ABC Fuzzy Controller Overshoot (%) Steady state error Settling time(sec) Performance in presence of White noise using ABC IT2 fuzzy controller Performance of cart position and pendulum angle in presence of white noise with different magnitudes and sample time of 0.1 is shown in Figures (a) (b) Figure 5.22: Performance in the presence of white noise of 0.1 magnitude for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller 137
 cart position and (b) pendulum angle using ABC")



27 (a) (b) Figure 5.23: Performance in the presence of white noise of 0.3 magnitude for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller (a) (b) Figure 5.24: Performance in the presence of white noise of 0.5 magnitude for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller It is clear from Table 5.5 that with increase in magnitude of noise overshoot in cart position and pendulum angle increases. The Inverted Pendulum system is investigated up to noise level of.55 magnitude using ABC IT2 fuzzy controller. 138


28 Table 5.5 Overshoot in cart position and pendulum angle with change in magnitude of white noise using ABC IT2 Fuzzy controller Magnitude Overshoot (%) in Cart position Overshoot (%) in pendulum angle Performance of cart position and pendulum angle in presence of Gaussian noise with different variances and sample time of 0.1 is shown in Figures (a) (b) Figure 5.25: Performance in the presence of Gaussian noise with variance 1 for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller 139

 pendulum angle")



29 (a) (b) Figure 5.26: Performance in the presence of Gaussian noise with variance 3 for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller (a) (b) Figure 5.27: Performance in the presence of Gaussian noise with variance 5 for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller (a) (b) Figure 5.28: Performance in the presence of Gaussian noise with variance 7 for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller 140
 cart position and (b) pendulum angle using ABC IT2 fuzzy Controller Table 5.")
 in pendulum angle 1 95 30 3 170 50 5 230 68 7 280 75 8 320 100 It is clear from table 5.")
30 (a) (b) Figure 5.29: Performance in the presence of Gaussian noise with variance 8 for (a) cart position and (b) pendulum angle using ABC IT2 fuzzy Controller Table 5.6 Overshoot in cart position and pendulum angle with change in magnitude of Gaussian noise using ABC IT2 Fuzzy controller Variance Overshoot (%) in cart position Overshoot (%) in pendulum angle It is clear from table 5.6 that with increase in variance of Gaussian noise overshoot in cart position and pendulum angle increases. The Inverted Pendulum system is evaluated up to noise level of variance
31 Performance with variation in mass for ABC IT2 Fuzzy Controller The mass of the pendulum is varied to different values and the cart positions with ABC IT2 Fuzzy controller is shown in Figure 5.30.Whereas by increasing the mass in case of ABC Fuzzy controller, the cart position was not able to attain steady state position due to presence of steady state error as shown in Figure But with ABC IT2 Fuzzy Controller cart position remains steady as is evident from Figure So ABC IT2 Fuzzy Controller handles variation in mass better than ABC Fuzzy Controller. Figure 5.30: Cart position of inverted pendulum with ABC IT2 Fuzzy controller for different mass M=0.21Kg,.31Kg, 0.41Kg, and 0.51Kg. 142
32 Figure 5.31: Performance of cart position using ABC-Fuzzy controller at different mass 5.11 CONCLUSIONS value An IT2 Fuzzy controller and ABC-based IT2 fuzzy controller have been implemented for a nonlinear model of Inverted Pendulum. The Interval type-2 FLC has some benefits in terms of handling large amounts of uncertainties frequently present in real world applications. ABC algorithm has been used to optimize the change of angle and change of velocity of the inverted pendulum. By the optimized values, the range of IT2 fuzzy membership function has been selected and performance of the IT2fuzzy controller is improved. The cart position and pendulum angle of the Inverted Pendulum with IT2 ABC-fuzzy controller has been compared with IT2 Fuzzy controller. It is clear from comparative analysis that ABC IT2 Fuzzy controller has lesser settling time of 3s whereas; it is 3.2s for IT2 Fuzzy Controller for pendulum angle. The performance of controller has also been evaluated at different pendulum mass values. It is observed that there is not any variation in the amplitude of cart position at different mass values. So it is independent of mass variation. But in case of fuzzy controller steady state value is not reached for cart position while increasing the mass. 143
33 Through the review of the various IT2 Fuzzy Controller applications, it has been observed that as the level of imprecision and uncertainty increases, the IT2 Fuzzy Controller provides a powerful paradigm to handle the high level of uncertainties present in real-world environments and applications. Also in various applications the IT2 Fuzzy Controller has given very well and smooth control responses that have outperformed their type-1 counterparts. The comparative analysis of Fuzzy Controller and IT2 Fuzzy Controller response in presence of short disturbance has shown that using IT2 Fuzzy Controller in real world applications which exhibits measurement noise, can be a good option since it has given better performance. Also in presence of white noise and Gaussian noise IT2 fuzzy controller has been able to simulate for longer time duration than fuzzy controller. Though IT2 fuzzy controller can adapt in different disturbance conditions and work appreciably well when compared to conventional controllers. Still it does not provide a mechanism to automatically acquire or tune those rules. In spite of all the advantages one drawback of fuzzy control is its exponential growth of rules for multivariable system, making the system sluggish and also multiple parameter adjustment which are also difficult to adjust. On the other hand neural-networks are adaptive systems that can be trained and tuned from a set of samples. Once they are trained, neural-networks can deal with new input data by generalizing the acquired knowledge. Moreover, hybrid controller ANFIS has advantages of both fuzzy and of neural networks; so it gives better performance. By training the FIS using neural networks one can reduce the number of rules of fuzzy system appreciably. Next chapter is devoted to implement ANFIS controller on Inverted Pendulum. 144
Type-2 Fuzzy Logic Control of Continuous Stirred Tank Reactor
 dvance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 2 (2013), pp. 169-178 Research India Publications http://www.ripublication.com/aeee.htm Type-2 Fuzzy Logic Control of Continuous
dvance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 2 (2013), pp. 169-178 Research India Publications http://www.ripublication.com/aeee.htm Type-2 Fuzzy Logic Control of Continuous
On-line control of nonlinear systems using a novel type-2 fuzzy logic method
 ORIGINAL RESEARCH On-line control of nonlinear systems using a novel type-2 fuzzy logic method Behrouz Safarinejadian, Mohammad Karimi Control Engineering Department, Shiraz University of Technology, Shiraz,
ORIGINAL RESEARCH On-line control of nonlinear systems using a novel type-2 fuzzy logic method Behrouz Safarinejadian, Mohammad Karimi Control Engineering Department, Shiraz University of Technology, Shiraz,
Adaptive Non-singleton Type-2 Fuzzy Logic Systems: A Way Forward for Handling Numerical Uncertainties in Real World Applications
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VI (2011), No. 3 (September), pp. 503-529 Adaptive Non-singleton Type-2 Fuzzy Logic Systems: A Way Forward for Handling
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VI (2011), No. 3 (September), pp. 503-529 Adaptive Non-singleton Type-2 Fuzzy Logic Systems: A Way Forward for Handling
CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION
 141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
ME 534. Mechanical Engineering University of Gaziantep. Dr. A. Tolga Bozdana Assistant Professor
 ME 534 Intelligent Manufacturing Systems Chp 4 Fuzzy Logic Mechanical Engineering University of Gaziantep Dr. A. Tolga Bozdana Assistant Professor Motivation and Definition Fuzzy Logic was initiated by
ME 534 Intelligent Manufacturing Systems Chp 4 Fuzzy Logic Mechanical Engineering University of Gaziantep Dr. A. Tolga Bozdana Assistant Professor Motivation and Definition Fuzzy Logic was initiated by
2010/07/12. Content. Fuzzy? Oxford Dictionary: blurred, indistinct, confused, imprecisely defined
 Content Introduction Graduate School of Science and Technology Basic Concepts Fuzzy Control Eamples H. Bevrani Fuzzy GC Spring Semester, 2 2 The class of tall men, or the class of beautiful women, do not
Content Introduction Graduate School of Science and Technology Basic Concepts Fuzzy Control Eamples H. Bevrani Fuzzy GC Spring Semester, 2 2 The class of tall men, or the class of beautiful women, do not
INTELLIGENT CONTROL OF DYNAMIC SYSTEMS USING TYPE-2 FUZZY LOGIC AND STABILITY ISSUES
 International Mathematical Forum, 1, 2006, no. 28, 1371-1382 INTELLIGENT CONTROL OF DYNAMIC SYSTEMS USING TYPE-2 FUZZY LOGIC AND STABILITY ISSUES Oscar Castillo, Nohé Cázarez, and Dario Rico Instituto
International Mathematical Forum, 1, 2006, no. 28, 1371-1382 INTELLIGENT CONTROL OF DYNAMIC SYSTEMS USING TYPE-2 FUZZY LOGIC AND STABILITY ISSUES Oscar Castillo, Nohé Cázarez, and Dario Rico Instituto
Uncertain System Control: An Engineering Approach
 Uncertain System Control: An Engineering Approach Stanisław H. Żak School of Electrical and Computer Engineering ECE 680 Fall 207 Fuzzy Logic Control---Another Tool in Our Control Toolbox to Cope with
Uncertain System Control: An Engineering Approach Stanisław H. Żak School of Electrical and Computer Engineering ECE 680 Fall 207 Fuzzy Logic Control---Another Tool in Our Control Toolbox to Cope with
Interval Type-2 Fuzzy Logic Systems Made Simple by Using Type-1 Mathematics
 Interval Type-2 Fuzzy Logic Systems Made Simple by Using Type-1 Mathematics Jerry M. Mendel University of Southern California, Los Angeles, CA WCCI 2006 1 Outline Motivation Type-2 Fuzzy Sets Interval
Interval Type-2 Fuzzy Logic Systems Made Simple by Using Type-1 Mathematics Jerry M. Mendel University of Southern California, Los Angeles, CA WCCI 2006 1 Outline Motivation Type-2 Fuzzy Sets Interval
On Constructing Parsimonious Type-2 Fuzzy Logic Systems via Influential Rule Selection
 On Constructing Parsimonious Type-2 Fuzzy Logic Systems via Influential Rule Selection Shang-Ming Zhou 1, Jonathan M. Garibaldi 2, Robert I. John 1, Francisco Chiclana 1 1 Centre for Computational Intelligence,
On Constructing Parsimonious Type-2 Fuzzy Logic Systems via Influential Rule Selection Shang-Ming Zhou 1, Jonathan M. Garibaldi 2, Robert I. John 1, Francisco Chiclana 1 1 Centre for Computational Intelligence,
Enhancing Fuzzy Controllers Using Generalized Orthogonality Principle
 Chapter 160 Enhancing Fuzzy Controllers Using Generalized Orthogonality Principle Nora Boumella, Juan Carlos Figueroa and Sohail Iqbal Additional information is available at the end of the chapter http://dx.doi.org/10.5772/51608
Chapter 160 Enhancing Fuzzy Controllers Using Generalized Orthogonality Principle Nora Boumella, Juan Carlos Figueroa and Sohail Iqbal Additional information is available at the end of the chapter http://dx.doi.org/10.5772/51608
Index Terms Magnetic Levitation System, Interval type-2 fuzzy logic controller, Self tuning type-2 fuzzy controller.
 Comparison Of Interval Type- Fuzzy Controller And Self Tuning Interval Type- Fuzzy Controller For A Magnetic Levitation System Shabeer Ali K P 1, Sanjay Sharma, Dr.Vijay Kumar 3 1 Student, E & CE Department,
Comparison Of Interval Type- Fuzzy Controller And Self Tuning Interval Type- Fuzzy Controller For A Magnetic Levitation System Shabeer Ali K P 1, Sanjay Sharma, Dr.Vijay Kumar 3 1 Student, E & CE Department,
DESIGN AND ANALYSIS OF TYPE-2 FUZZY LOGIC SYSTEMS WU, DONGRUI
 DESIGN AND ANALYSIS OF TYPE-2 FUZZY LOGIC SYSTEMS WU, DONGRUI A THESIS SUBMITTED FOR THE DEGREE OF MASTER OF ENGINEERING DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING NATIONAL UNIVERSITY OF SINGAPORE
DESIGN AND ANALYSIS OF TYPE-2 FUZZY LOGIC SYSTEMS WU, DONGRUI A THESIS SUBMITTED FOR THE DEGREE OF MASTER OF ENGINEERING DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING NATIONAL UNIVERSITY OF SINGAPORE
Institute for Advanced Management Systems Research Department of Information Technologies Åbo Akademi University. Fuzzy Logic Controllers - Tutorial
 Institute for Advanced Management Systems Research Department of Information Technologies Åbo Akademi University Directory Table of Contents Begin Article Fuzzy Logic Controllers - Tutorial Robert Fullér
Institute for Advanced Management Systems Research Department of Information Technologies Åbo Akademi University Directory Table of Contents Begin Article Fuzzy Logic Controllers - Tutorial Robert Fullér
FUZZY CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL
 Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Hamidreza Rashidy Kanan. Electrical Engineering Department, Bu-Ali Sina University
 Lecture 3 Fuzzy Systems and their Properties Hamidreza Rashidy Kanan Assistant Professor, Ph.D. Electrical Engineering Department, Bu-Ali Sina University h.rashidykanan@basu.ac.ir; kanan_hr@yahoo.com 2
Lecture 3 Fuzzy Systems and their Properties Hamidreza Rashidy Kanan Assistant Professor, Ph.D. Electrical Engineering Department, Bu-Ali Sina University h.rashidykanan@basu.ac.ir; kanan_hr@yahoo.com 2
Rule-Based Fuzzy Model
 In rule-based fuzzy systems, the relationships between variables are represented by means of fuzzy if then rules of the following general form: Ifantecedent proposition then consequent proposition The
In rule-based fuzzy systems, the relationships between variables are represented by means of fuzzy if then rules of the following general form: Ifantecedent proposition then consequent proposition The
FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT
 http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
Lecture 06. (Fuzzy Inference System)
") Lecture 06 Fuzzy Rule-based System (Fuzzy Inference System) Fuzzy Inference System vfuzzy inference is the process of formulating the mapping from a given input to an output using fuzzy logic. Fuzzy Inference
Lecture 06 Fuzzy Rule-based System (Fuzzy Inference System) Fuzzy Inference System vfuzzy inference is the process of formulating the mapping from a given input to an output using fuzzy logic. Fuzzy Inference
Handling Uncertainty using FUZZY LOGIC
 Handling Uncertainty using FUZZY LOGIC Fuzzy Set Theory Conventional (Boolean) Set Theory: 38 C 40.1 C 41.4 C 38.7 C 39.3 C 37.2 C 42 C Strong Fever 38 C Fuzzy Set Theory: 38.7 C 40.1 C 41.4 C More-or-Less
Handling Uncertainty using FUZZY LOGIC Fuzzy Set Theory Conventional (Boolean) Set Theory: 38 C 40.1 C 41.4 C 38.7 C 39.3 C 37.2 C 42 C Strong Fever 38 C Fuzzy Set Theory: 38.7 C 40.1 C 41.4 C More-or-Less
Indian Weather Forecasting using ANFIS and ARIMA based Interval Type-2 Fuzzy Logic Model
 AMSE JOURNALS 2014-Series: Advances D; Vol. 19; N 1; pp 52-70 Submitted Feb. 2014; Revised April 24, 2014; Accepted May 10, 2014 Indian Weather Forecasting using ANFIS and ARIMA based Interval Type-2 Fuzzy
AMSE JOURNALS 2014-Series: Advances D; Vol. 19; N 1; pp 52-70 Submitted Feb. 2014; Revised April 24, 2014; Accepted May 10, 2014 Indian Weather Forecasting using ANFIS and ARIMA based Interval Type-2 Fuzzy
Intelligent Optimal Control of a Heat Exchanger Using ANFIS and Interval Type-2 Based Fuzzy Inference System
 ISS: 2319-8753 Intelligent Optimal Control of a Heat Exchanger Using AFIS and Interval Type-2 Based Fuzzy Inference System 1 Borkar Pravin Kumar, 2 Jha Manoj, 3 Qureshi M.F., 4 Agrawal G.K. 1 Department
ISS: 2319-8753 Intelligent Optimal Control of a Heat Exchanger Using AFIS and Interval Type-2 Based Fuzzy Inference System 1 Borkar Pravin Kumar, 2 Jha Manoj, 3 Qureshi M.F., 4 Agrawal G.K. 1 Department
Models for Inexact Reasoning. Fuzzy Logic Lesson 8 Fuzzy Controllers. Master in Computational Logic Department of Artificial Intelligence
 Models for Inexact Reasoning Fuzzy Logic Lesson 8 Fuzzy Controllers Master in Computational Logic Department of Artificial Intelligence Fuzzy Controllers Fuzzy Controllers are special expert systems KB
Models for Inexact Reasoning Fuzzy Logic Lesson 8 Fuzzy Controllers Master in Computational Logic Department of Artificial Intelligence Fuzzy Controllers Fuzzy Controllers are special expert systems KB
EXCITATION CONTROL OF SYNCHRONOUS GENERATOR USING A FUZZY LOGIC BASED BACKSTEPPING APPROACH
 EXCITATION CONTROL OF SYNCHRONOUS GENERATOR USING A FUZZY LOGIC BASED BACKSTEPPING APPROACH Abhilash Asekar 1 1 School of Engineering, Deakin University, Waurn Ponds, Victoria 3216, Australia ---------------------------------------------------------------------***----------------------------------------------------------------------
EXCITATION CONTROL OF SYNCHRONOUS GENERATOR USING A FUZZY LOGIC BASED BACKSTEPPING APPROACH Abhilash Asekar 1 1 School of Engineering, Deakin University, Waurn Ponds, Victoria 3216, Australia ---------------------------------------------------------------------***----------------------------------------------------------------------
is implemented by a fuzzy relation R i and is defined as
 FS VI: Fuzzy reasoning schemes R 1 : ifx is A 1 and y is B 1 then z is C 1 R 2 : ifx is A 2 and y is B 2 then z is C 2... R n : ifx is A n and y is B n then z is C n x is x 0 and y is ȳ 0 z is C The i-th
FS VI: Fuzzy reasoning schemes R 1 : ifx is A 1 and y is B 1 then z is C 1 R 2 : ifx is A 2 and y is B 2 then z is C 2... R n : ifx is A n and y is B n then z is C n x is x 0 and y is ȳ 0 z is C The i-th
A Hybrid Approach For Air Conditioning Control System With Fuzzy Logic Controller
 International Journal of Engineering and Applied Sciences (IJEAS) A Hybrid Approach For Air Conditioning Control System With Fuzzy Logic Controller K.A. Akpado, P. N. Nwankwo, D.A. Onwuzulike, M.N. Orji
International Journal of Engineering and Applied Sciences (IJEAS) A Hybrid Approach For Air Conditioning Control System With Fuzzy Logic Controller K.A. Akpado, P. N. Nwankwo, D.A. Onwuzulike, M.N. Orji
FUZZY CONTROL OF CHAOS
 International Journal of Bifurcation and Chaos, Vol. 8, No. 8 (1998) 1743 1747 c World Scientific Publishing Company FUZZY CONTROL OF CHAOS OSCAR CALVO CICpBA, L.E.I.C.I., Departamento de Electrotecnia,
International Journal of Bifurcation and Chaos, Vol. 8, No. 8 (1998) 1743 1747 c World Scientific Publishing Company FUZZY CONTROL OF CHAOS OSCAR CALVO CICpBA, L.E.I.C.I., Departamento de Electrotecnia,
FUZZY CONTROL OF CHAOS
 FUZZY CONTROL OF CHAOS OSCAR CALVO, CICpBA, L.E.I.C.I., Departamento de Electrotecnia, Facultad de Ingeniería, Universidad Nacional de La Plata, 1900 La Plata, Argentina JULYAN H. E. CARTWRIGHT, Departament
FUZZY CONTROL OF CHAOS OSCAR CALVO, CICpBA, L.E.I.C.I., Departamento de Electrotecnia, Facultad de Ingeniería, Universidad Nacional de La Plata, 1900 La Plata, Argentina JULYAN H. E. CARTWRIGHT, Departament
EFFECT OF VARYING CONTROLLER PARAMETERS ON THE PERFORMANCE OF A FUZZY LOGIC CONTROL SYSTEM
 Nigerian Journal of Technology, Vol. 19, No. 1, 2000, EKEMEZIE & OSUAGWU 40 EFFECT OF VARYING CONTROLLER PARAMETERS ON THE PERFORMANCE OF A FUZZY LOGIC CONTROL SYSTEM Paul N. Ekemezie and Charles C. Osuagwu
Nigerian Journal of Technology, Vol. 19, No. 1, 2000, EKEMEZIE & OSUAGWU 40 EFFECT OF VARYING CONTROLLER PARAMETERS ON THE PERFORMANCE OF A FUZZY LOGIC CONTROL SYSTEM Paul N. Ekemezie and Charles C. Osuagwu
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur
 Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
Islamic University of Gaza Electrical Engineering Department EELE 6306 Fuzzy Logic Control System Med term Exam October 30, 2011
 Islamic University of Gaza Electrical Engineering Department EELE 6306 Fuzzy Logic Control System Med term Exam October 30, 2011 Dr. Basil Hamed Exam Time 2:00-4:00 Name Solution Student ID Grade GOOD
Islamic University of Gaza Electrical Engineering Department EELE 6306 Fuzzy Logic Control System Med term Exam October 30, 2011 Dr. Basil Hamed Exam Time 2:00-4:00 Name Solution Student ID Grade GOOD
Prediction of Ultimate Shear Capacity of Reinforced Normal and High Strength Concrete Beams Without Stirrups Using Fuzzy Logic
 American Journal of Civil Engineering and Architecture, 2013, Vol. 1, No. 4, 75-81 Available online at http://pubs.sciepub.com/ajcea/1/4/2 Science and Education Publishing DOI:10.12691/ajcea-1-4-2 Prediction
American Journal of Civil Engineering and Architecture, 2013, Vol. 1, No. 4, 75-81 Available online at http://pubs.sciepub.com/ajcea/1/4/2 Science and Education Publishing DOI:10.12691/ajcea-1-4-2 Prediction
MODELLING OF TOOL LIFE, TORQUE AND THRUST FORCE IN DRILLING: A NEURO-FUZZY APPROACH
 ISSN 1726-4529 Int j simul model 9 (2010) 2, 74-85 Original scientific paper MODELLING OF TOOL LIFE, TORQUE AND THRUST FORCE IN DRILLING: A NEURO-FUZZY APPROACH Roy, S. S. Department of Mechanical Engineering,
ISSN 1726-4529 Int j simul model 9 (2010) 2, 74-85 Original scientific paper MODELLING OF TOOL LIFE, TORQUE AND THRUST FORCE IN DRILLING: A NEURO-FUZZY APPROACH Roy, S. S. Department of Mechanical Engineering,
Fuzzy Logic. An introduction. Universitat Politécnica de Catalunya. Departament de Teoria del Senyal i Comunicacions.
 Universitat Politécnica de Catalunya Departament de Teoria del Senyal i Comunicacions Fuzzy Logic An introduction Prepared by Temko Andrey 2 Outline History and sphere of applications Basics. Fuzzy sets
Universitat Politécnica de Catalunya Departament de Teoria del Senyal i Comunicacions Fuzzy Logic An introduction Prepared by Temko Andrey 2 Outline History and sphere of applications Basics. Fuzzy sets
This time: Fuzzy Logic and Fuzzy Inference
 This time: Fuzzy Logic and Fuzzy Inference Why use fuzzy logic? Tipping example Fuzzy set theory Fuzzy inference CS 460, Sessions 22-23 1 What is fuzzy logic? A super set of Boolean logic Builds upon fuzzy
This time: Fuzzy Logic and Fuzzy Inference Why use fuzzy logic? Tipping example Fuzzy set theory Fuzzy inference CS 460, Sessions 22-23 1 What is fuzzy logic? A super set of Boolean logic Builds upon fuzzy
ABSTRACT I. INTRODUCTION II. FUZZY MODEL SRUCTURE
 International Journal of Scientific Research in Computer Science, Engineering and Information Technology 2018 IJSRCSEIT Volume 3 Issue 6 ISSN : 2456-3307 Temperature Sensitive Short Term Load Forecasting:
International Journal of Scientific Research in Computer Science, Engineering and Information Technology 2018 IJSRCSEIT Volume 3 Issue 6 ISSN : 2456-3307 Temperature Sensitive Short Term Load Forecasting:
CHAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER
 85 CAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER 5. INTRODUCTION The simulation studies presented in the earlier chapter are obviously proved that the design of a classical
85 CAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER 5. INTRODUCTION The simulation studies presented in the earlier chapter are obviously proved that the design of a classical
A Simplified Architecture of Type-2 TSK Fuzzy Logic Controller for Fuzzy Model of Double Inverted Pendulums
 Theory and Applications of Mathematics & Computer Science 2 (2) (22) 2 3 A Simplified Architecture of Type-2 TSK Fuzzy Logic Controller for Fuzzy Model of Double Inverted Pendulums Hodeiseh Gordan a Assef
Theory and Applications of Mathematics & Computer Science 2 (2) (22) 2 3 A Simplified Architecture of Type-2 TSK Fuzzy Logic Controller for Fuzzy Model of Double Inverted Pendulums Hodeiseh Gordan a Assef
EEE 8005 Student Directed Learning (SDL) Industrial Automation Fuzzy Logic
 Industrial Automation Fuzzy Logic") EEE 8005 Student Directed Learning (SDL) Industrial utomation Fuzzy Logic Desire location z 0 Rot ( y, φ ) Nail cos( φ) 0 = sin( φ) 0 0 0 0 sin( φ) 0 cos( φ) 0 0 0 0 z 0 y n (0,a,0) y 0 y 0 z n End effector
EEE 8005 Student Directed Learning (SDL) Industrial utomation Fuzzy Logic Desire location z 0 Rot ( y, φ ) Nail cos( φ) 0 = sin( φ) 0 0 0 0 sin( φ) 0 cos( φ) 0 0 0 0 z 0 y n (0,a,0) y 0 y 0 z n End effector
Control of an Ambiguous Real Time System Using Interval Type 2 Fuzzy Logic Control
 International Journal of Applied Engineering Research ISSN 973-462 Volume 12, Number 21 (17) pp.11383-11391 Control of an Ambiguous Real Time System Using Interval Type 2 Fuzzy Logic Control Deepa Thangavelusamy
International Journal of Applied Engineering Research ISSN 973-462 Volume 12, Number 21 (17) pp.11383-11391 Control of an Ambiguous Real Time System Using Interval Type 2 Fuzzy Logic Control Deepa Thangavelusamy
Fuzzy Control Systems Process of Fuzzy Control
 Fuzzy Control Systems The most widespread use of fuzzy logic today is in fuzzy control applications. Across section of applications that have successfully used fuzzy control includes: Environmental Control
Fuzzy Control Systems The most widespread use of fuzzy logic today is in fuzzy control applications. Across section of applications that have successfully used fuzzy control includes: Environmental Control
Civil Engineering. Elixir Civil Engg. 112 (2017)
") 48886 Available online at www.elixirpublishers.com (Elixir International Journal) Civil Engineering Elixir Civil Engg. 112 (2017) 48886-48891 Prediction of Ultimate Strength of PVC-Concrete Composite Columns
48886 Available online at www.elixirpublishers.com (Elixir International Journal) Civil Engineering Elixir Civil Engg. 112 (2017) 48886-48891 Prediction of Ultimate Strength of PVC-Concrete Composite Columns
Reduced Size Rule Set Based Fuzzy Logic Dual Input Power System Stabilizer
 772 NATIONAL POWER SYSTEMS CONFERENCE, NPSC 2002 Reduced Size Rule Set Based Fuzzy Logic Dual Input Power System Stabilizer Avdhesh Sharma and MLKothari Abstract-- The paper deals with design of fuzzy
772 NATIONAL POWER SYSTEMS CONFERENCE, NPSC 2002 Reduced Size Rule Set Based Fuzzy Logic Dual Input Power System Stabilizer Avdhesh Sharma and MLKothari Abstract-- The paper deals with design of fuzzy
Circuit Implementation of a Variable Universe Adaptive Fuzzy Logic Controller. Weiwei Shan
 Circuit Implementation of a Variable Universe Adaptive Fuzzy Logic Controller Weiwei Shan Outline 1. Introduction: Fuzzy logic and Fuzzy control 2. Basic Ideas of Variable Universe of Discourse 3. Algorithm
Circuit Implementation of a Variable Universe Adaptive Fuzzy Logic Controller Weiwei Shan Outline 1. Introduction: Fuzzy logic and Fuzzy control 2. Basic Ideas of Variable Universe of Discourse 3. Algorithm
UNIVERSITY OF SURREY
 UNIVERSITY OF SURREY B.Sc. Undergraduate Programmes in Computing B.Sc. Undergraduate Programmes in Mathematical Studies Level HE3 Examination MODULE CS364 Artificial Intelligence Time allowed: 2 hours
UNIVERSITY OF SURREY B.Sc. Undergraduate Programmes in Computing B.Sc. Undergraduate Programmes in Mathematical Studies Level HE3 Examination MODULE CS364 Artificial Intelligence Time allowed: 2 hours
Enhanced Fuzzy Model Reference Learning Control for Conical tank process
 Enhanced Fuzzy Model Reference Learning Control for Conical tank process S.Ramesh 1 Assistant Professor, Dept. of Electronics and Instrumentation Engineering, Annamalai University, Annamalainagar, Tamilnadu.
Enhanced Fuzzy Model Reference Learning Control for Conical tank process S.Ramesh 1 Assistant Professor, Dept. of Electronics and Instrumentation Engineering, Annamalai University, Annamalainagar, Tamilnadu.
Fuzzy Logic and Computing with Words. Ning Xiong. School of Innovation, Design, and Engineering Mälardalen University. Motivations
 /3/22 Fuzzy Logic and Computing with Words Ning Xiong School of Innovation, Design, and Engineering Mälardalen University Motivations Human centric intelligent systems is a hot trend in current research,
/3/22 Fuzzy Logic and Computing with Words Ning Xiong School of Innovation, Design, and Engineering Mälardalen University Motivations Human centric intelligent systems is a hot trend in current research,
TYPE-2 fuzzy sets (T2 FSs), originally introduced by
, originally introduced by") 808 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 14, NO. 6, DECEMBER 2006 Interval Type-2 Fuzzy Logic Systems Made Simple Jerry M. Mendel, Life Fellow, IEEE, Robert I. John, Member, IEEE, and Feilong Liu,
808 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 14, NO. 6, DECEMBER 2006 Interval Type-2 Fuzzy Logic Systems Made Simple Jerry M. Mendel, Life Fellow, IEEE, Robert I. John, Member, IEEE, and Feilong Liu,
Fuzzy Controller. Fuzzy Inference System. Basic Components of Fuzzy Inference System. Rule based system: Contains a set of fuzzy rules
 Fuzz Controller Fuzz Inference Sstem Basic Components of Fuzz Inference Sstem Rule based sstem: Contains a set of fuzz rules Data base dictionar: Defines the membership functions used in the rules base
Fuzz Controller Fuzz Inference Sstem Basic Components of Fuzz Inference Sstem Rule based sstem: Contains a set of fuzz rules Data base dictionar: Defines the membership functions used in the rules base
FUZZY LOGIC CONTROL of SRM 1 KIRAN SRIVASTAVA, 2 B.K.SINGH 1 RajKumar Goel Institute of Technology, Ghaziabad 2 B.T.K.I.T.
 FUZZY LOGIC CONTROL of SRM 1 KIRAN SRIVASTAVA, 2 B.K.SINGH 1 RajKumar Goel Institute of Technology, Ghaziabad 2 B.T.K.I.T., Dwarhat E-mail: 1 2001.kiran@gmail.com,, 2 bksapkec@yahoo.com ABSTRACT The fuzzy
FUZZY LOGIC CONTROL of SRM 1 KIRAN SRIVASTAVA, 2 B.K.SINGH 1 RajKumar Goel Institute of Technology, Ghaziabad 2 B.T.K.I.T., Dwarhat E-mail: 1 2001.kiran@gmail.com,, 2 bksapkec@yahoo.com ABSTRACT The fuzzy
OUTLINE. Introduction History and basic concepts. Fuzzy sets and fuzzy logic. Fuzzy clustering. Fuzzy inference. Fuzzy systems. Application examples
 OUTLINE Introduction History and basic concepts Fuzzy sets and fuzzy logic Fuzzy clustering Fuzzy inference Fuzzy systems Application examples "So far as the laws of mathematics refer to reality, they
OUTLINE Introduction History and basic concepts Fuzzy sets and fuzzy logic Fuzzy clustering Fuzzy inference Fuzzy systems Application examples "So far as the laws of mathematics refer to reality, they
CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR
 CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR 4.1 Introduction Fuzzy Logic control is based on fuzzy set theory. A fuzzy set is a set having uncertain and imprecise nature of abstract thoughts, concepts
CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR 4.1 Introduction Fuzzy Logic control is based on fuzzy set theory. A fuzzy set is a set having uncertain and imprecise nature of abstract thoughts, concepts
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore.
 This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title An evolving interval type-2 fuzzy inference system for renewable energy prediction intervals( Phd Thesis
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title An evolving interval type-2 fuzzy inference system for renewable energy prediction intervals( Phd Thesis
RamchandraBhosale, Bindu R (Electrical Department, Fr.CRIT,Navi Mumbai,India)
") Indirect Vector Control of Induction motor using Fuzzy Logic Controller RamchandraBhosale, Bindu R (Electrical Department, Fr.CRIT,Navi Mumbai,India) ABSTRACT: AC motors are widely used in industries for
Indirect Vector Control of Induction motor using Fuzzy Logic Controller RamchandraBhosale, Bindu R (Electrical Department, Fr.CRIT,Navi Mumbai,India) ABSTRACT: AC motors are widely used in industries for
Water Quality Management using a Fuzzy Inference System
 Water Quality Management using a Fuzzy Inference System Kumaraswamy Ponnambalam and Seyed Jamshid Mousavi A fuzzy inference system (FIS) is presented for the optimal operation of a reservoir system with
Water Quality Management using a Fuzzy Inference System Kumaraswamy Ponnambalam and Seyed Jamshid Mousavi A fuzzy inference system (FIS) is presented for the optimal operation of a reservoir system with
This time: Fuzzy Logic and Fuzzy Inference
 This time: Fuzzy Logic and Fuzzy Inference Why use fuzzy logic? Tipping example Fuzzy set theory Fuzzy inference CS 460, Sessions 22-23 1 What is fuzzy logic? A super set of Boolean logic Builds upon fuzzy
This time: Fuzzy Logic and Fuzzy Inference Why use fuzzy logic? Tipping example Fuzzy set theory Fuzzy inference CS 460, Sessions 22-23 1 What is fuzzy logic? A super set of Boolean logic Builds upon fuzzy
A Multi-Factor HMM-based Forecasting Model for Fuzzy Time Series
 A Multi-Factor HMM-based Forecasting Model for Fuzzy Time Series Hui-Chi Chuang, Wen-Shin Chang, Sheng-Tun Li Department of Industrial and Information Management Institute of Information Management National
A Multi-Factor HMM-based Forecasting Model for Fuzzy Time Series Hui-Chi Chuang, Wen-Shin Chang, Sheng-Tun Li Department of Industrial and Information Management Institute of Information Management National
CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL
 104 CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL 5.1 INTRODUCTION Fuzzy control is one of the most active areas of research in the application of fuzzy set theory, especially in complex control tasks, which
104 CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL 5.1 INTRODUCTION Fuzzy control is one of the most active areas of research in the application of fuzzy set theory, especially in complex control tasks, which
What is fuzzy? A dictionary definition. And so what is a Fuzzy Set? events. a not clear Set? 1. Of or resembling fuzz.
 Sterowanie rozmyte What is fuzzy? A dictionary definition 1. Of or resembling fuzz. 2. Not clear; indistinct: a fuzzy recollection of past events. 3. Not coherent; confused: a fuzzy plan of action. 4.
Sterowanie rozmyte What is fuzzy? A dictionary definition 1. Of or resembling fuzz. 2. Not clear; indistinct: a fuzzy recollection of past events. 3. Not coherent; confused: a fuzzy plan of action. 4.
MODELLING THERMAL COMFORT FOR TROPICS USING FUZZY LOGIC
 Eighth International IBPSA Conference Eindhoven, Netherlands August 11-14, 2003 MODELLING THERMAL COMFORT FOR TROPICS USING FUZZY LOGIC Henry Feriadi, Wong Nyuk Hien Department of Building, School of Design
Eighth International IBPSA Conference Eindhoven, Netherlands August 11-14, 2003 MODELLING THERMAL COMFORT FOR TROPICS USING FUZZY LOGIC Henry Feriadi, Wong Nyuk Hien Department of Building, School of Design
FS Part 1 : Uncertainty, Intervals and FS. André Bigand, LISIC, ULCO Université Lille-Nord de France Web:www-lisic.univ-littoral.
 FS Part 1 : Uncertainty, Intervals and FS André Bigand, LISIC, ULCO Université Lille-Nord de France Web:www-lisic.univ-littoral.fr\~bigand\ EILCO 18/01/2016 Introduction to Fuzzy Set Theory OBJECTIVES
FS Part 1 : Uncertainty, Intervals and FS André Bigand, LISIC, ULCO Université Lille-Nord de France Web:www-lisic.univ-littoral.fr\~bigand\ EILCO 18/01/2016 Introduction to Fuzzy Set Theory OBJECTIVES
Intersection and union of type-2 fuzzy sets and connection to (α 1, α 2 )-double cuts
-double cuts") EUSFLAT-LFA 2 July 2 Aix-les-Bains, France Intersection and union of type-2 fuzzy sets and connection to (α, α 2 )-double cuts Zdenko Takáč Institute of Information Engineering, Automation and Mathematics
EUSFLAT-LFA 2 July 2 Aix-les-Bains, France Intersection and union of type-2 fuzzy sets and connection to (α, α 2 )-double cuts Zdenko Takáč Institute of Information Engineering, Automation and Mathematics
Fundamentals. 2.1 Fuzzy logic theory
 Fundamentals 2 In this chapter we briefly review the fuzzy logic theory in order to focus the type of fuzzy-rule based systems with which we intend to compute intelligible models. Although all the concepts
Fundamentals 2 In this chapter we briefly review the fuzzy logic theory in order to focus the type of fuzzy-rule based systems with which we intend to compute intelligible models. Although all the concepts
CS344: Introduction to Artificial Intelligence (associated lab: CS386)
") CS344: Introduction to Artificial Intelligence (associated lab: CS386) Pushpak Bhattacharyya CSE Dept., IIT Bombay Lecture 2: Fuzzy Logic and Inferencing Disciplines which form the core of AI- inner circle
CS344: Introduction to Artificial Intelligence (associated lab: CS386) Pushpak Bhattacharyya CSE Dept., IIT Bombay Lecture 2: Fuzzy Logic and Inferencing Disciplines which form the core of AI- inner circle
[2007] IEEE. Reprinted, with permission, from [Mingsheng Ying, Retraction and Generalized Extension of Computing with Words, Fuzzy Systems, IEEE
![[2007] IEEE. Reprinted, with permission, from [Mingsheng Ying, Retraction and Generalized Extension of Computing with Words, Fuzzy Systems, IEEE](/thumbs/89/98774679.jpg "[2007] IEEE. Reprinted, with permission, from [Mingsheng Ying, Retraction and Generalized Extension of Computing with Words, Fuzzy Systems, IEEE") 2007] IEEE. Reprinted, with permission, from Mingsheng Ying, Retraction and Generalized Extension of Computing with Words, Fuzzy Systems, IEEE Transactions on (Volume:15, Issue: 6 ), Dec.2007]. This material
2007] IEEE. Reprinted, with permission, from Mingsheng Ying, Retraction and Generalized Extension of Computing with Words, Fuzzy Systems, IEEE Transactions on (Volume:15, Issue: 6 ), Dec.2007]. This material
System Performance Ratings of High Speed Nano Devices Using Fuzzy Logic
 www.ijcsi.org 302 ormance Ratings of High Speed Nano Devices Using Fuzzy Logic Ak.Ashakumar Singh Y.Surjit Singh K.Surchandra Singh Department of Computer Science Dept. of Computer Science Dept. of Computer
www.ijcsi.org 302 ormance Ratings of High Speed Nano Devices Using Fuzzy Logic Ak.Ashakumar Singh Y.Surjit Singh K.Surchandra Singh Department of Computer Science Dept. of Computer Science Dept. of Computer
Fuzzy Associative Conjuncted Maps Network Hanlin Goh, Joo-Hwee Lim, Member, IEEE, and Chai Quek, Member, IEEE
 1302 IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL 20, NO 8, AUGUST 2009 Fuzzy Associative Conjuncted Maps Network Hanlin Goh, Joo-Hwee Lim, Member, IEEE, and Chai Quek, Member, IEEE Abstract The fuzzy associative
1302 IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL 20, NO 8, AUGUST 2009 Fuzzy Associative Conjuncted Maps Network Hanlin Goh, Joo-Hwee Lim, Member, IEEE, and Chai Quek, Member, IEEE Abstract The fuzzy associative
APPLICATION OF AIR HEATER AND COOLER USING FUZZY LOGIC CONTROL SYSTEM
 APPLICATION OF AIR HEATER AND COOLER USING FUZZY LOGIC CONTROL SYSTEM Dr.S.Chandrasekaran, Associate Professor and Head, Khadir Mohideen College, Adirampattinam E.Tamil Mani, Research Scholar, Khadir Mohideen
APPLICATION OF AIR HEATER AND COOLER USING FUZZY LOGIC CONTROL SYSTEM Dr.S.Chandrasekaran, Associate Professor and Head, Khadir Mohideen College, Adirampattinam E.Tamil Mani, Research Scholar, Khadir Mohideen
Failure Mode Screening Using Fuzzy Set Theory
 International Mathematical Forum, 4, 9, no. 6, 779-794 Failure Mode Screening Using Fuzzy Set Theory D. Pandey a, Sanjay Kumar Tyagi b and Vinesh Kumar c a, c Department of Mathematics, C.C.S. University,
International Mathematical Forum, 4, 9, no. 6, 779-794 Failure Mode Screening Using Fuzzy Set Theory D. Pandey a, Sanjay Kumar Tyagi b and Vinesh Kumar c a, c Department of Mathematics, C.C.S. University,
A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games
 International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
Improvement of Process Failure Mode and Effects Analysis using Fuzzy Logic
 Applied Mechanics and Materials Online: 2013-08-30 ISSN: 1662-7482, Vol. 371, pp 822-826 doi:10.4028/www.scientific.net/amm.371.822 2013 Trans Tech Publications, Switzerland Improvement of Process Failure
Applied Mechanics and Materials Online: 2013-08-30 ISSN: 1662-7482, Vol. 371, pp 822-826 doi:10.4028/www.scientific.net/amm.371.822 2013 Trans Tech Publications, Switzerland Improvement of Process Failure
5. Lecture Fuzzy Systems
 Soft Control (AT 3, RMA) 5. Lecture Fuzzy Systems Fuzzy Control 5. Structure of the lecture. Introduction Soft Control: Definition and delimitation, basic of 'intelligent' systems 2. Knowledge representation
Soft Control (AT 3, RMA) 5. Lecture Fuzzy Systems Fuzzy Control 5. Structure of the lecture. Introduction Soft Control: Definition and delimitation, basic of 'intelligent' systems 2. Knowledge representation
A Study on the Fuzzy Modeling of Nonlinear Systems Using Kernel Machines
 A Study on the Fuzzy Modeling of Nonlinear Systems Using Kernel Machines February 2007 Jongcheol Kim A Study on the Fuzzy Modeling of Nonlinear Systems Using Kernel Machines A Study on the Fuzzy Modeling
A Study on the Fuzzy Modeling of Nonlinear Systems Using Kernel Machines February 2007 Jongcheol Kim A Study on the Fuzzy Modeling of Nonlinear Systems Using Kernel Machines A Study on the Fuzzy Modeling
Fuzzy control systems. Miklós Gerzson
 Fuzzy control systems Miklós Gerzson 2016.11.24. 1 Introduction The notion of fuzziness: type of car the determination is unambiguous speed of car can be measured, but the judgment is not unambiguous:
Fuzzy control systems Miklós Gerzson 2016.11.24. 1 Introduction The notion of fuzziness: type of car the determination is unambiguous speed of car can be measured, but the judgment is not unambiguous:
An Integrated Approach for Process Control Valves Diagnosis Using Fuzzy Logic
 World Journal of Nuclear Science and Technology, 2014, 4, 148-157 Published Online July 2014 in SciRes. http://www.scirp.org/journal/wjnst http://dx.doi.org/10.4236/wjnst.2014.43019 An Integrated Approach
World Journal of Nuclear Science and Technology, 2014, 4, 148-157 Published Online July 2014 in SciRes. http://www.scirp.org/journal/wjnst http://dx.doi.org/10.4236/wjnst.2014.43019 An Integrated Approach
COMPARISON OF FUZZY LOGIC CONTROLLERS FOR A MULTIVARIABLE PROCESS
 COMPARISON OF FUZZY LOGIC CONTROLLERS FOR A MULTIVARIABLE PROCESS KARTHICK S, LAKSHMI P, DEEPA T 3 PG Student, DEEE, College of Engineering, Guindy, Anna University, Cennai Associate Professor, DEEE, College
COMPARISON OF FUZZY LOGIC CONTROLLERS FOR A MULTIVARIABLE PROCESS KARTHICK S, LAKSHMI P, DEEPA T 3 PG Student, DEEE, College of Engineering, Guindy, Anna University, Cennai Associate Professor, DEEE, College
Study of a neural network-based system for stability augmentation of an airplane
 Study of a neural network-based system for stability augmentation of an airplane Author: Roger Isanta Navarro Annex 1 Introduction to Neural Networks and Adaptive Neuro-Fuzzy Inference Systems (ANFIS)
Study of a neural network-based system for stability augmentation of an airplane Author: Roger Isanta Navarro Annex 1 Introduction to Neural Networks and Adaptive Neuro-Fuzzy Inference Systems (ANFIS)
Towards Smooth Monotonicity in Fuzzy Inference System based on Gradual Generalized Modus Ponens
 8th Conference of the European Society for Fuzzy Logic and Technology (EUSFLAT 2013) Towards Smooth Monotonicity in Fuzzy Inference System based on Gradual Generalized Modus Ponens Phuc-Nguyen Vo1 Marcin
8th Conference of the European Society for Fuzzy Logic and Technology (EUSFLAT 2013) Towards Smooth Monotonicity in Fuzzy Inference System based on Gradual Generalized Modus Ponens Phuc-Nguyen Vo1 Marcin
Design of Decentralized Fuzzy Controllers for Quadruple tank Process
 IJCSNS International Journal of Computer Science and Network Security, VOL.8 No.11, November 2008 163 Design of Fuzzy Controllers for Quadruple tank Process R.Suja Mani Malar1 and T.Thyagarajan2, 1 Assistant
IJCSNS International Journal of Computer Science and Network Security, VOL.8 No.11, November 2008 163 Design of Fuzzy Controllers for Quadruple tank Process R.Suja Mani Malar1 and T.Thyagarajan2, 1 Assistant
Weighted Fuzzy Time Series Model for Load Forecasting
 NCITPA 25 Weighted Fuzzy Time Series Model for Load Forecasting Yao-Lin Huang * Department of Computer and Communication Engineering, De Lin Institute of Technology yaolinhuang@gmail.com * Abstract Electric
NCITPA 25 Weighted Fuzzy Time Series Model for Load Forecasting Yao-Lin Huang * Department of Computer and Communication Engineering, De Lin Institute of Technology yaolinhuang@gmail.com * Abstract Electric
Lecture 1: Introduction & Fuzzy Control I
 Lecture 1: Introduction & Fuzzy Control I Jens Kober Robert Babuška Knowledge-Based Control Systems (SC42050) Cognitive Robotics 3mE, Delft University of Technology, The Netherlands 12-02-2018 Lecture
Lecture 1: Introduction & Fuzzy Control I Jens Kober Robert Babuška Knowledge-Based Control Systems (SC42050) Cognitive Robotics 3mE, Delft University of Technology, The Netherlands 12-02-2018 Lecture
Research Article Enhancing the Supersonic Wind Tunnel Performance Based on Plenum Temperature Control
 ISRN Aerospace Engineering, Article ID 3749, 6 pages http://dx.doi.org/.55/24/3749 Research Article Enhancing the Supersonic Wind Tunnel Performance Based on Plenum Temperature Control A. Nazarian Shahrbabaki,
ISRN Aerospace Engineering, Article ID 3749, 6 pages http://dx.doi.org/.55/24/3749 Research Article Enhancing the Supersonic Wind Tunnel Performance Based on Plenum Temperature Control A. Nazarian Shahrbabaki,
Fuzzy logic : principles and applications
 École d été Franco Roumaine Commande Avancée des Systèmes & Nouvelles Technologies Informatiques CA NTI 2015 Fuzzy logic : principles and applications Dr. Ing. Professor-Researcher Co-responsable of ESEA
École d été Franco Roumaine Commande Avancée des Systèmes & Nouvelles Technologies Informatiques CA NTI 2015 Fuzzy logic : principles and applications Dr. Ing. Professor-Researcher Co-responsable of ESEA
Fuzzy Logic Notes. Course: Khurshid Ahmad 2010 Typset: Cathal Ormond
 Fuzzy Logic Notes Course: Khurshid Ahmad 2010 Typset: Cathal Ormond April 25, 2011 Contents 1 Introduction 2 1.1 Computers......................................... 2 1.2 Problems..........................................
Fuzzy Logic Notes Course: Khurshid Ahmad 2010 Typset: Cathal Ormond April 25, 2011 Contents 1 Introduction 2 1.1 Computers......................................... 2 1.2 Problems..........................................
Type-2 Fuzzy Shortest Path
 Intern. J. Fuzzy Mathematical rchive Vol. 2, 2013, 36-42 ISSN: 2320 3242 (P), 2320 3250 (online) Published on 15 ugust 2013 www.researchmathsci.org International Journal of Type-2 Fuzzy Shortest Path V.
Intern. J. Fuzzy Mathematical rchive Vol. 2, 2013, 36-42 ISSN: 2320 3242 (P), 2320 3250 (online) Published on 15 ugust 2013 www.researchmathsci.org International Journal of Type-2 Fuzzy Shortest Path V.
A Soft Computing Approach for Fault Prediction of Electronic Systems
 A Soft Computing Approach for Fault Prediction of Electronic Systems Ajith Abraham School of Computing & Information Technology Monash University (Gippsland Campus), Victoria 3842, Australia Email: Ajith.Abraham@infotech.monash.edu.au
A Soft Computing Approach for Fault Prediction of Electronic Systems Ajith Abraham School of Computing & Information Technology Monash University (Gippsland Campus), Victoria 3842, Australia Email: Ajith.Abraham@infotech.monash.edu.au
Fuzzy Logic Controller
 Speed Control of Separately Excited DC Motor using Fuzzy Logic Controller A thesis submitted in fulfilment of prerequisites of Bachelor s Degree in Electrical Engineering By T. YUVA RADHA KRISHNA 111EE0055
Speed Control of Separately Excited DC Motor using Fuzzy Logic Controller A thesis submitted in fulfilment of prerequisites of Bachelor s Degree in Electrical Engineering By T. YUVA RADHA KRISHNA 111EE0055
1. Brief History of Intelligent Control Systems Design Technology
 Acknowledgments We would like to express our appreciation to Professor S.V. Ulyanov for his continuous help, value corrections and comments to the organization of this paper. We also wish to acknowledge
Acknowledgments We would like to express our appreciation to Professor S.V. Ulyanov for his continuous help, value corrections and comments to the organization of this paper. We also wish to acknowledge
Human Blood Pressure and Body Temp Analysis Using Fuzzy Logic Control System
 222 IJCSNS International Journal of Computer Science and Network Security, VOL.17 No.12, December 2017 Human Blood Pressure and Body Temp Analysis Using Fuzzy Logic Control System Syeda Binish Zahra 1,
222 IJCSNS International Journal of Computer Science and Network Security, VOL.17 No.12, December 2017 Human Blood Pressure and Body Temp Analysis Using Fuzzy Logic Control System Syeda Binish Zahra 1,
Wind Turbine Power Generation: Response Prediction
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 78-1684,p-ISSN: 30-334X, Volume 7, Issue 1 (May. - Jun. 013), PP 31-39 Wind Turbine Power Generation: Response Prediction Akash Deep
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 78-1684,p-ISSN: 30-334X, Volume 7, Issue 1 (May. - Jun. 013), PP 31-39 Wind Turbine Power Generation: Response Prediction Akash Deep
Fuzzy controller for adjustment of liquid level in the tank
 Annals of the University of Craiova, Mathematics and Computer Science Series Volume 38(4), 2011, Pages 33 43 ISSN: 1223-6934, Online 2246-9958 Fuzzy controller for adjustment of liquid level in the tank
Annals of the University of Craiova, Mathematics and Computer Science Series Volume 38(4), 2011, Pages 33 43 ISSN: 1223-6934, Online 2246-9958 Fuzzy controller for adjustment of liquid level in the tank
3- DOF Scara type Robot Manipulator using Mamdani Based Fuzzy Controller
 659 3- DOF Scara type Robot Manipulator using Mamdani Based Fuzzy Controller Nitesh Kumar Jaiswal *, Vijay Kumar ** *(Department of Electronics and Communication Engineering, Indian Institute of Technology,
659 3- DOF Scara type Robot Manipulator using Mamdani Based Fuzzy Controller Nitesh Kumar Jaiswal *, Vijay Kumar ** *(Department of Electronics and Communication Engineering, Indian Institute of Technology,
Fuzzy Logic Controller Based on Association Rules
 Annals of the University of Craiova, Mathematics and Computer Science Series Volume 37(3), 2010, Pages 12 21 ISSN: 1223-6934 Fuzzy Logic Controller Based on Association Rules Ion IANCU and Mihai GABROVEANU
Annals of the University of Craiova, Mathematics and Computer Science Series Volume 37(3), 2010, Pages 12 21 ISSN: 1223-6934 Fuzzy Logic Controller Based on Association Rules Ion IANCU and Mihai GABROVEANU
A New Method for Forecasting Enrollments based on Fuzzy Time Series with Higher Forecast Accuracy Rate
 A New Method for Forecasting based on Fuzzy Time Series with Higher Forecast Accuracy Rate Preetika Saxena Computer Science and Engineering, Medi-caps Institute of Technology & Management, Indore (MP),
A New Method for Forecasting based on Fuzzy Time Series with Higher Forecast Accuracy Rate Preetika Saxena Computer Science and Engineering, Medi-caps Institute of Technology & Management, Indore (MP),
Uncertainty and Rules
 Uncertainty and Rules We have already seen that expert systems can operate within the realm of uncertainty. There are several sources of uncertainty in rules: Uncertainty related to individual rules Uncertainty
Uncertainty and Rules We have already seen that expert systems can operate within the realm of uncertainty. There are several sources of uncertainty in rules: Uncertainty related to individual rules Uncertainty
OPTIMAL CAPACITOR PLACEMENT USING FUZZY LOGIC
 CHAPTER - 5 OPTIMAL CAPACITOR PLACEMENT USING FUZZY LOGIC 5.1 INTRODUCTION The power supplied from electrical distribution system is composed of both active and reactive components. Overhead lines, transformers
CHAPTER - 5 OPTIMAL CAPACITOR PLACEMENT USING FUZZY LOGIC 5.1 INTRODUCTION The power supplied from electrical distribution system is composed of both active and reactive components. Overhead lines, transformers
A New Method to Forecast Enrollments Using Fuzzy Time Series
 International Journal of Applied Science and Engineering 2004. 2, 3: 234-244 A New Method to Forecast Enrollments Using Fuzzy Time Series Shyi-Ming Chen a and Chia-Ching Hsu b a Department of Computer
International Journal of Applied Science and Engineering 2004. 2, 3: 234-244 A New Method to Forecast Enrollments Using Fuzzy Time Series Shyi-Ming Chen a and Chia-Ching Hsu b a Department of Computer
Algorithms for Increasing of the Effectiveness of the Making Decisions by Intelligent Fuzzy Systems
 Journal of Electrical Engineering 3 (205) 30-35 doi: 07265/2328-2223/2050005 D DAVID PUBLISHING Algorithms for Increasing of the Effectiveness of the Making Decisions by Intelligent Fuzzy Systems Olga
Journal of Electrical Engineering 3 (205) 30-35 doi: 07265/2328-2223/2050005 D DAVID PUBLISHING Algorithms for Increasing of the Effectiveness of the Making Decisions by Intelligent Fuzzy Systems Olga
Synthesis of Nonlinear Control of Switching Topologies of Buck-Boost Converter Using Fuzzy Logic on Field Programmable Gate Array (FPGA)
") Journal of Intelligent Learning Systems and Applications, 2010, 2: 36-42 doi:10.4236/jilsa.2010.21005 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Synthesis of Nonlinear Control
Journal of Intelligent Learning Systems and Applications, 2010, 2: 36-42 doi:10.4236/jilsa.2010.21005 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Synthesis of Nonlinear Control
Introduction to Intelligent Control Part 6
 ECE 4951 - Spring 2010 ntroduction to ntelligent Control Part 6 Prof. Marian S. Stachowicz Laboratory for ntelligent Systems ECE Department, University of Minnesota Duluth February 4-5, 2010 Fuzzy System
ECE 4951 - Spring 2010 ntroduction to ntelligent Control Part 6 Prof. Marian S. Stachowicz Laboratory for ntelligent Systems ECE Department, University of Minnesota Duluth February 4-5, 2010 Fuzzy System