Inversions of ray transforms on simple surfaces
|
|
|
- Homer Lane
- 5 years ago
- Views:
Transcription
1 Inversions of ray transforms on simple surfaces François Monard Department of Mathematics, University of Washington. June 09, 2015 Institut Henri Poincaré - Program on Inverse problems 1 / 42
2 Outline 1 Introduction 2 The 2D Radon transform 3 Geodesic X-ray transforms 4 Some weighted transforms 5 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors Inversion procedure for functions Numerical examples
3 Introduction Geodesic X-Ray transforms in two dimensions (M, M, g) non-trapping Riemannian surface with strictly convex boundary. SM: unit tangent bundle. ± SM = {(x, v) SM : x M, ±g(v, ν x ) > 0}, Geodesic flow: φ t(x, v) = (γ x,v (t), γ x,v (t)), (ν x : unit inner normal) (x, v) SM, t [τ(x, v), τ(x, v)]. Geodesic X-ray transform of a function F L 2 (SM): I [F ](x, v) = τ(x,v) 0 F (φ t (x, v)) dt, (x, v) + SM. Contains the tensor tomography problem and weighted transforms. Underdetermined problem: 3D (unknown) > 2D (data). 2 / 42
4 Introduction Formally determined problems New goal: reconstruct a 2D function f (x) from such transforms, assuming the rest is known. Examples: F (x, v) = f (x) (unattenuated transform) Transmission tomography F (x, v) = X f (= df ) (solenoidal vector field) Doppler tomography F (x, v) = f (x)dz k (v k ) (symmetric differential) F (x, v) = f (x)w(x, v), w known (weighted, attenuated) SPECT More applications: Linearized Calderón s problem, deformation boundary rigidity, elastography in slightly anisotropic media [Sharafutdinov 94], Calderón problem for Hodge Laplacian (F. Chung s talk). 3 / 42
5 Outline 1 Introduction 2 The 2D Radon transform 3 Geodesic X-ray transforms 4 Some weighted transforms 5 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors Inversion procedure for functions Numerical examples

6 The 2D Radon transform Radon transform - definition First considered and inverted by Johann Radon in Let Ω R 2, bounded, f with support in Ω. R f (x) Rf (s, θ) = f (s ˆθ + t ˆθ ) dt, R ˆθ := ( cos θ sin θ ), (s, θ) R S1. 4 / 42
 dl. I out a 0: attenuation coefficient.")
7 The 2D Radon transform History: application to transmission tomography An incoming beam of photons with intensity I in subject to Beer s law di dt + ai = 0 along its straight path through a body is such that the outgoing intensity measured gives log I in = a(l) dl. I out a 0: attenuation coefficient. L 5 / 42
8 The 2D Radon transform FST, Inversion formula and ill-conditioning Fourier Slice Theorem (motivates a first inversion formula) F s ρ [Rf ](ρ, θ) = F x ξ [f ](ρˆθ), (ρ, θ) R S 1. Second inversion (R t : backprojection) : f = 1 4π Rt H s Rf, Hg(t) = 1 π p.v. g(t) R t s ds. H s R t 6 / 42
9 The 2D Radon transform Regularization theory - FBP algorithms This transform is ill-posed of order 1/2: f H s C Rf H s+1/2, s 0. Proper regularization theory to deal with noisy data (d: rel. cutoff bandwidth): x ( ) W d f = R t s w d Rf, W d := R t w b, w d = w d (s). w d, d = 1.0 F s ρ w d ram-lak recons. 7 / 42
: W d x f = R t ( w d s Rf ), W d := R t w b, w d = w d (s). w d, d = 0.")
10 The 2D Radon transform Regularization theory - FBP algorithms This transform is ill-posed of order 1/2: f H s C Rf H s+1/2, s 0. Proper regularization theory to deal with noisy data (d: rel. cutoff bandwidth): W d x f = R t ( w d s Rf ), W d := R t w b, w d = w d (s). w d, d = 0.5 F s ρ w d ram-lak recons. 7 / 42
11 The 2D Radon transform Regularization theory - FBP algorithms This transform is ill-posed of order 1/2: f H s C Rf H s+1/2, s 0. Proper regularization theory to deal with noisy data (d: rel. cutoff bandwidth): W d x f = R t ( w d s Rf ), W d := R t w b, w d = w d (s). w d, d = 0.2 F s ρ w d ram-lak recons. 7 / 42
. 2 In problems with partial data, one understands exactly which singularities are lost.")
12 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
13 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
. 2 In problems with partial data, one understands exactly which singularities are lost.")
14 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
15 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
16 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
. 2 In problems with partial data, one understands exactly which singularities are lost.")
17 The 2D Radon transform Radon transform as an elliptic FIO 1 Well-described 1 2 correspondence between singularities in (x, y) and singularities in (s, θ). 2 In problems with partial data, one understands exactly which singularities are lost. 3 Example: exterior problem. 8 / 42
18 The 2D Radon transform Control of discretization errors [Natterer 01] Various choices of scanning geometry: Parallel, Fan-beam, PET, Interlaced parallel. Optimality of geometries well-understood. Nyquist criteria, estimates of sampling errors. 9 / 42
19 Outline 1 Introduction 2 The 2D Radon transform 3 Geodesic X-ray transforms 4 Some weighted transforms 5 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors Inversion procedure for functions Numerical examples
20 Geodesic X-ray transforms GXRT (versus Radon) In general non-euclidean geometry: Scanning geometries: GXRT can only be parameterized on + SM (no global parameterization). Fourier Slice Theorem: probably not in general. Regularization theory, control of discretization error: open. But... a reconstruction formula! (in the simple case) Last but not least / 42
21 Geodesic X-ray transforms GXRT (versus Radon) In general non-euclidean geometry: Scanning geometries: GXRT can only be parameterized on + SM (no global parameterization). Fourier Slice Theorem: probably not in general. Regularization theory, control of discretization error: open. But... a reconstruction formula! (in the simple case) Last but not least / 42
22 Geodesic X-ray transforms GXRT (versus Radon) In general non-euclidean geometry: Scanning geometries: GXRT can only be parameterized on + SM (no global parameterization). Fourier Slice Theorem: probably not in general. Regularization theory, control of discretization error: open. But... a reconstruction formula! (in the simple case) Last but not least / 42
23 Geodesic X-ray transforms GXRT (versus Radon) In general non-euclidean geometry: Scanning geometries: GXRT can only be parameterized on + SM (no global parameterization). Fourier Slice Theorem: probably not in general. Regularization theory, control of discretization error: open. But... a reconstruction formula! (in the simple case) Last but not least / 42
24 Geodesic X-ray transforms GXRT (versus Radon) In general non-euclidean geometry: Scanning geometries: GXRT can only be parameterized on + SM (no global parameterization). Fourier Slice Theorem: probably not in general. Regularization theory, control of discretization error: open. But... a reconstruction formula! (in the simple case) Last but not least / 42
 is simple iff (i) M is strictly convex ( g( t t, ν) > c 0")

25 Geodesic X-ray transforms Simple versus non-simple Definition: (M, g) is simple iff (i) M is strictly convex ( g( t t, ν) > c 0 > 0) and (ii) M has no conjugate points. Convex Non-convex No conj. points Conj. points Simple = almost as nice as Euclidean. 11 / 42
26 Geodesic X-ray transforms Literature 1/3 - simple case Classically: Radial metrics: [Herglotz 1905], [Wiechert-Zoeppritz 1907] Symmetric spaces: [Radon 1917] (Euclidean), [Funk 1916] (2-sphere), [Helgason ]. Injectivity: [Mukhometov 75] via energy estimates. Stability: [Stefanov-Uhlmann 04]: I t I is a ΨDO or order -1. Reconstruction algorithms: [Pestov-Uhlmann 04]: Fredholm equations on simple surfaces (+ range characterization) [Krishnan 10]: κ small = equations are invertible. 12 / 42
27 Geodesic X-ray transforms Literature 2/3 - The non-simple case S-Injectivity : [Sharafudtinov 97] on non-trapping spherically symmetric layers (n 2). [Stefanov-Uhlmann 08] real-analytic metrics satisfying additional conditions (n 3). [Uhlmann-Vasy, Zhou 13] [Stefanov-Uhlmann-Vasy 14] local inj. on manifolds satisfying a certain foliation condition. (n 3). Stability : [Stefanov-Uhlmann 12] effect of fold caustics (n 2). [M.-Stefanov-Uhlmann, 14], [Holman-Uhlmann 15] general caustics. 13 / 42
28 Geodesic X-ray transforms Literature 3/3 - Numerical methods Numerical Methods: Radon transform: [Natterer 01] thorough study. Attenuated case [Natterer 01, Kazantsev-Bukhgeim 07],.... Tensor tomography via polynomial bases [Derevtsov 05] Vector field tomography in a refractive medium [Svetov et al. 13] General metrics, Pestov-Uhlmann reconstructions [M. 14] 14 / 42
29 Geodesic X-ray transforms The geometry of the unit sphere bundle 1/2 Unit circle bundle: SM := {(x, v) TM : g(v, v) = 1}. Moving frame on SM: X (x, v) = d dt t=0φ t (x, v) (geodesic vector field), V = θ (vertical derivative), X = [X, V ] (horizontal derivative), with structure equations [X, V ] = X and [X, X ] κv. Metric on SM:, SM such that (X, X, V ) is orthonormal. L 2 (SM, dσ 3 ) with dσ 3 volume form. 15 / 42
30 Geodesic X-ray transforms The geometry of the unit sphere bundle 2/2 Orthogonal decomposition of L 2 (SM, dσ 3 ): L 2 (SM) = k Z H k, H k := ker(v ikid), Ω k = H k C (SM). u(x, θ) = k Z π k u(x, θ) = k Z π k u(x)e ikθ. Splitting: X = η + + η, η ± : Ω k Ω k±1. Hilbert transform: H s.t. H Ωk = i sign(k)id Ωk with sign(0) = 0. Commutator formula: [Pestov-Uhlmann 05] [H, X ]u = X π 0 + π 0 X. Even/odd decomposition: u = u + + u with u ± := k ev/od u k. 16 / 42
31 Geodesic X-ray transforms Transport equations Transport equations on SM: For f L 2 (SM), denote by u f the solution of Xu = f (SM), u SM = 0, so that u f +SM = If. For w L 2 µ( + SM), define w ψ the unique solution u to Two operators of interest: Xu = 0 (SM), u +SM = w. I 0 f = If for f L 2 (M). I h = I (X h) for h H0 1 (M) (solenoidal potential). 17 / 42
32 Geodesic X-ray transforms Pestov-Uhlmann inversions Fredholm equations: [Pestov-Uhlmann 04] (Id + W 2 )f = I A +H A I 0f, (Id + (W ) 2 )h = I0 A +H +A I h, where Wf := π 0 X u f and W h := π 0 u X h are L 2 (M) adjoints. Idea of proof (left eqn): 1 derive that f = π 0 Xu f = π 0 X Hu, f 2 use [H, X ] to derive a transport problem for Hu. f Facts: (M, g) simple = W, W smoothing [Pestov-Uhlmann 04] κ = cst = W 0. κ small = W, W L 2 (M)-contractions. [Krishnan 10] 18 / 42
33 Outline 1 Introduction 2 The 2D Radon transform 3 Geodesic X-ray transforms 4 Some weighted transforms 5 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors Inversion procedure for functions Numerical examples
34 Some weighted transforms A generalization to k-differentials Problem: For k Z, reconstruct f C (M) from I k f = I (fe ikθ ) or I k, f = I (X (fe ikθ )). Note the transport equation Xu = f (x)e ikθ, u SM = 0. Applications: Tensor tomography for certain kinds of tensors, not necessarily solenoidal. Buiding-block nature of I restricted to Ω k : was used in [P-S-U 13] to give a range characterization of geodesic ray transforms over m-tensors. Equivalent problems: weighted transform with weight e ikθ, or ray transforms with a unitary connection ( [P-S-U 13]): v := u f e ikθ satisfies Xv + ik(x λ)v = f (x), v SM = 0, 19 / 42
35 Some weighted transforms Injectivity [M., 14]: I k and I k, are injective, as a consequence of [P-S-U 12]. Idea for inversion: Hilbert transform shifted in frequency: For u L 2 (SM), define H (k) u := e ikθ H(e ikθ u). Equivalently, H (k) u = l Z i sign(l k)u l. Generalization of commutators in [Pestov-Uhlmann 05] : [H (k), X ] = X π k + π k X and [H (k), X ] = X π k π k X. (Proof : direct calculation in the decomposition of L 2 (SM)) 20 / 42
36 Some weighted transforms Fredholm equations [M., IP 14] Fredholm equations: (generalization of k = 0) (Id + W 2 k )f = I k, A +H (k) A σk I k f, (Id + (W k ) 2 )h = I k A +H (k) A σk I k, h, where σ k = ( 1) k+1, W k f := π k X u feikθ and W k f := π ku X (fe ikθ). Further facts: (M, g) simple = W k, Wk smoothing, L2 (M) L 2 (M) compact. W k L 2 L 2 C κ + kc κ. Inversion via Neumann series in some cases. Open: Is Id + W 2 k invertible for any simple (M, g)? 21 / 42
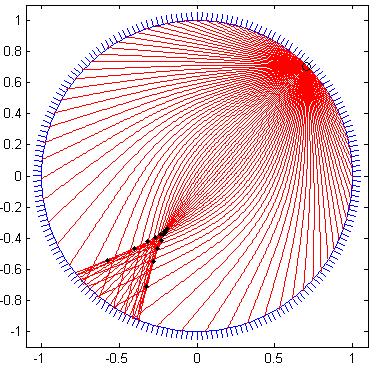
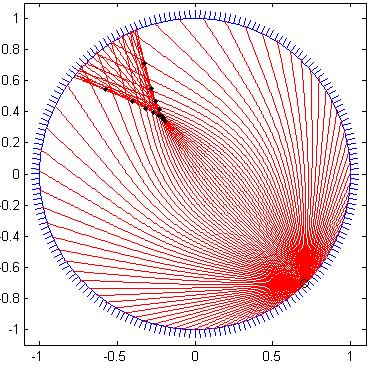
37 Some weighted transforms Numerical examples: I m f, m = 4, 7, 10 f geodesics: 22 / 42
A I k, 23 /")
38 Some weighted transforms Example of single inversion from I 4 f A + H (4)A I k, 23 / 42
39 Some weighted transforms Inversions from I m f, m = 4, 10 Reconstruction/error at first iteration Error at 5 iterations m = 4 m = / 42
40 Some weighted transforms Numerical examples: I m, f, m = 4, 7, 10 f geodesics: 25 / 42

41 Some weighted transforms Inversions from I m, f, m = 4, 10 Reconstruction/error at first iteration Error at 5 iterations m = 4 m = / 42

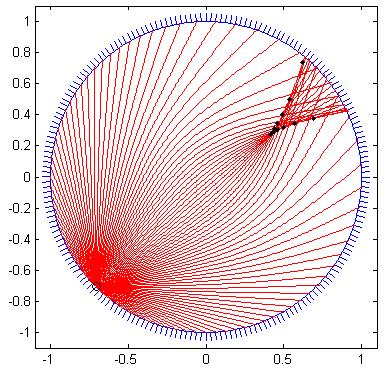
42 Some weighted transforms Numerical examples (non-simple): I m f, m = 4, 7, 10 f geodesics: 27 / 42

43 Some weighted transforms Non-simple case: inversions from I m, f, m = 4, 10 Reconstruction/error at first iteration Error at 5 iterations m = 4 m = / 42
44 Outline 1 Introduction 2 The 2D Radon transform 3 Geodesic X-ray transforms 4 Some weighted transforms 5 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors Inversion procedure for functions Numerical examples
45 The attenuated geodesic X-ray transform The problem Transform of interest: a : M R known smooth attenuation. τ(x,v) ( t ) I af (x, v) = f (φ t(x, v)) exp a(φ s(x, v)) ds dt, (x, v) +SM. 0 0 Two integrands of interest: functions on M vector fields (not necessary solenoidal) Inverse problem: Can we recover f from I a f? Reduction to a PDE: I a f = u +SM, where u solves Xu + au = f (SM), u SM = / 42
46 The attenuated geodesic X-ray transform Litterature Euclidean/constant curvature case A-analytic functions [Arbuzov-Bukhgeim-Kazantsev 98] Complexification method [Novikov 02], [Natterer 01], [Boman-Strömberg 04], [Bal 04] [Hoell-Bal 13] Review paper: [Finch 04] and references there fan-beam: [Kazantsev-Bukhgeim 07] Riemannian case Injectivity/inversion: [Salo-Uhlmann 11] Connections/Higgs field [Paternain-Salo-Uhlmann 12] Tensor tomography on simple surfaces [PSU 13] Doppler transform [Holman-Stefanov 10] Stability: [Stefanov-Uhlmann 04] (weights) [M.-Stefanov-Uhlmann 14] Inversion for functions and vector fields [M., preprint 15] Higher dimensions: [Uhlmann-Vasy, Zhou 13] 30 / 42
47 The attenuated geodesic X-ray transform Euclidean case, past ideas Unattenuated case: In complex form, θ u = f can be rewritten as e iθ z u + e iθ z u = f. Approach 1 [Bukhgeim et al. 98]: Decompose into Fourier series, get a tridiagonal system: z u k 1 + z u k+1 = f k, k Z. If f k = 0 for all k < 0, reason on the sequence (u 0, u 1, u 2,... ). Attenuated case: Turn θ u + au = f into θ (ue h ) = fe h, where (fe h ) k = 0 for k < 0! Answer: h = 0 a(x + tθ) dt 1 2 (Id ih)pa(θ, x θ ). Approach 2 [Novikov 02]: complexify e iθ = λ, extend the problem to λ C and solve a Riemann-Hilbert problem. 31 / 42
48 The attenuated geodesic X-ray transform Present case Some ingredients: (Note: parallel geometry no longer available) Since SM M S 1, Fourier analysis on the fibers: u(x, θ) = k= u k (x, θ), u k (x, θ) = ũ k (x)e ikθ, u L 2 (SM). Splitting [Guillemin-Kazhdan 80]: X = η + + η, where η ± : Ω k Ω ±1 are elliptic (, operators). Projecting Xu = f onto Ω k yields the tridiagonal system: η + u k 1 + η u k+1 = f k, k Z. Hilbert transform: H(f (x)e ikθ ) = isgn (k)f (x)e ikθ with sgn (0) = 0. u is holomorphic iff u k = 0 for all k < / 42
49 The attenuated geodesic X-ray transform Holomorphic integrating factors (HIF) as a crucial tool [Salo-Uhlmann, JDG 11] : Important fact: Let u, f smooth such that Xu = f, f holomorphic and u SM = 0. If I 0, I injective, then u is holomorphic and u 0 = 0. Yields injectivity. Surjectivity of I (I 0 was done in [Pestov-Uhlmann 04]). Existence of HIF based on using preimages by I0 and I. First reconstruction procedure for functions. Questions: Except for constant curvature cases, how to explicitely construct HIFs? The procedure required solving 3D transport equations. Can we simplify this? 33 / 42
50 The attenuated geodesic X-ray transform Explicit holomorphic integrating factors An explicit construction of holo int. factors Recall unattenuated inversion formulas [Pestov-Uhlmann 04]: (Id + W 2 )f = I (... )I 0f, (Id + (W ) 2 )h = I 0 (... )I h. Besides providing inversion formulas for I 0 and I via Neumann series, they provide ways to construct preimages of I 0 and I. Main assumption: Id + W 2 is injective: so far, only possible under κ small [Krishnan 10]. When this is satisfied, w = 2πi(Id + ih)n ψ with I n = a is holo, odd solution to Xw = a. w = 2πi(Id + ih)p ψ with I0 p = a is holo, even solution to Xw = X a. these constructions are continuous in appropriate spaces. Note: In numerics, store n or p instead of w! 34 / 42
51 The attenuated geodesic X-ray transform Inversion procedure for functions Once a holomorphic solution w of Xw = a is constructed, work on the PDE for v = ue w : Xv = fe w (SM), v SM = e w I a f. One approach (among others): Introduce H w u := e w H(e w u) and derive that [H w, X ] = e w (X π 0 + π 0 X )e w. (works because Xw Ω 0 ). Follow procedure presented earlier. This time, it only works if v can be first made holomorphic. This can be done using, again, certain holomorphic integrating factors and using the fact that v SM is known. Then one can obtain f + W 2 w f = (... )I a f, where W w f = π 0 e w X u fe w is L 2 (M) L 2 (M)-compact. 35 / 42
52 The attenuated geodesic X-ray transform Inversion procedure for functions Theorem (M. 15) Let h L (SM) such that Vh C 1 (SM). Then K h : L 2 (M) L 2 (M) given by K h f := (X u hf ) 0 is continuous and satisfies K h L 2 L 2 C( κ h + Vh C 1). If h 1, K h is compact [Pestov-Uhlmann 04] and satisfies the estimate above [Krishnan 10]. Theorem (M. 15) If a C 2 and κ are small enough, one can reconstruct f from I a f via an explicit Neumann series. Numerics: smoothness requirement on a can probably be relaxed. 36 / 42
53 The attenuated geodesic X-ray transform Inversion procedure for functions Second inversion approach: à la Kazantsev-Bukhgeim Theorem (M. 15) Let (M, g) a simple Riemannian surface with boundary and a C (M, R). Then a function f C (M, R) is determined by I af via the reconstruction formula f = 2iη ( I(e w h ψ) ) 1, h = 1 2 (D w ) +SM, where w is an odd holomorphic solution of Xw = a, D = (Id ih)(e w I af ), and w is a holo solution of Xw = I 1 0, (A D). For f 1, f 2 C (M, R), at every x M where a(x) 0, the vector field V (x, θ) = f 1(x) cos θ + f 2(x) sin θ can be reconstructed from I av via the formula (f 1(x) if 2(x))e iθ = 2iη ( 1 a η ( (I(e w h ψ)) 1 ) ), with h, w, D, w constructed similarly as above. 37 / 42

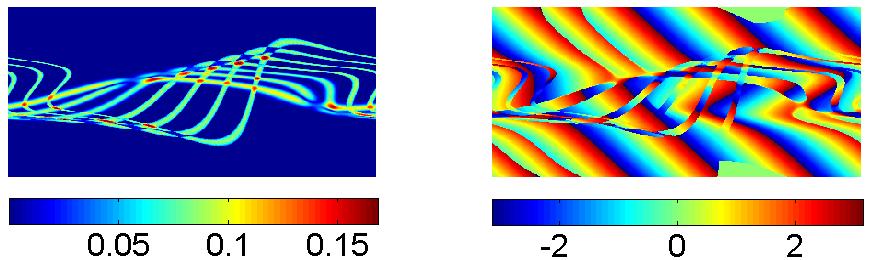
54 The attenuated geodesic X-ray transform Numerical examples Setup Metric and geodesics: 38 / 42


55 The attenuated geodesic X-ray transform Numerical examples Inversion (low attenuation) 39 / 42
 The Neumann series may diverge if attenuation is too high.")
56 The attenuated geodesic X-ray transform Numerical examples Inversion (high attenuation) The Neumann series may diverge if attenuation is too high. 40 / 42
57 Conclusion Conclusion: We have presented inversion algorithms applicable to a broad range of ray transforms weighted or with unitary connections, attenuated. Attenuated case: explicit holomorphic integrating factors, inversion for functions and vector fields. Numerics work in more cases than what is theoretically proved. Prospects: Regularization theory on Riemannian surfaces? Magnetic case? Illustrate the [M.-Stefanov-Uhlmann, 15] results on surfaces with pairs of conjugate points. Understand error terms W, W k, W w better in all simple cases. 41 / 42
58 Conclusion Thank you! Numerical implementation of two-dimensional geodesic X-ray transforms and their inversion, SIIMS, 7(2): On reconstruction formulas for the ray transform acting on symmetric differentials on surfaces, Inverse Problems 30: (2014) Inversion of the attenuated geodesic X-ray transform over functions and vector fields on simple surfaces, submitted. (Mar. 2015) arxiv: References and slides available at 42 / 42
Numerical Methods for geodesic X-ray transforms and applications to open theoretical questions
 Numerical Methods for geodesic X-ray transforms and applications to open theoretical questions François Monard Department of Mathematics, University of Washington. Nov. 13, 2014 UW Numerical Analysis Research
Numerical Methods for geodesic X-ray transforms and applications to open theoretical questions François Monard Department of Mathematics, University of Washington. Nov. 13, 2014 UW Numerical Analysis Research
Recent progress on the explicit inversion of geodesic X-ray transforms
 Recent progress on the explicit inversion of geodesic X-ray transforms François Monard Department of Mathematics, University of Washington. Geometric Analysis and PDE seminar University of Cambridge, May
Recent progress on the explicit inversion of geodesic X-ray transforms François Monard Department of Mathematics, University of Washington. Geometric Analysis and PDE seminar University of Cambridge, May
THE ATTENUATED RAY TRANSFORM ON SIMPLE SURFACES
 THE ATTENUATED RAY TRANSFORM ON SIMPLE SURFACES MIKKO SALO AND GUNTHER UHLMANN Abstract. We show that the attenuated geodesic ray transform on two dimensional simple surfaces is injective. Moreover we
THE ATTENUATED RAY TRANSFORM ON SIMPLE SURFACES MIKKO SALO AND GUNTHER UHLMANN Abstract. We show that the attenuated geodesic ray transform on two dimensional simple surfaces is injective. Moreover we
Transparent connections
 The abelian case A definition (M, g) is a closed Riemannian manifold, d = dim M. E M is a rank n complex vector bundle with a Hermitian metric (i.e. a U(n)-bundle). is a Hermitian (i.e. metric) connection
The abelian case A definition (M, g) is a closed Riemannian manifold, d = dim M. E M is a rank n complex vector bundle with a Hermitian metric (i.e. a U(n)-bundle). is a Hermitian (i.e. metric) connection
THE ATTENUATED RAY TRANSFORM FOR CONNECTIONS AND HIGGS FIELDS
 THE ATTENUATED RAY TRANSFORM FOR CONNECTIONS AND HIGGS FIELDS GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN Abstract. We show that for a simple surface with boundary the attenuated ray transform
THE ATTENUATED RAY TRANSFORM FOR CONNECTIONS AND HIGGS FIELDS GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN Abstract. We show that for a simple surface with boundary the attenuated ray transform
YERNAT M. ASSYLBEKOV AND PLAMEN STEFANOV
 SHARP STABILITY ESTIMATE FOR THE GEODESIC RAY TRANSFORM YERNAT M. ASSYLBEKOV AND PLAMEN STEFANOV Abstract. We prove a sharp L 2 H stability estimate for the geodesic X-ray transform of tensor fields of
SHARP STABILITY ESTIMATE FOR THE GEODESIC RAY TRANSFORM YERNAT M. ASSYLBEKOV AND PLAMEN STEFANOV Abstract. We prove a sharp L 2 H stability estimate for the geodesic X-ray transform of tensor fields of
Recovery of anisotropic metrics from travel times
 Purdue University The Lens Rigidity and the Boundary Rigidity Problems Let M be a bounded domain with boundary. Let g be a Riemannian metric on M. Define the scattering relation σ and the length (travel
Purdue University The Lens Rigidity and the Boundary Rigidity Problems Let M be a bounded domain with boundary. Let g be a Riemannian metric on M. Define the scattering relation σ and the length (travel
A SHARP STABILITY ESTIMATE IN TENSOR TOMOGRAPHY
 A SHARP STABILITY ESTIMATE IN TENSOR TOMOGRAPHY PLAMEN STEFANOV 1. Introduction Let (M, g) be a compact Riemannian manifold with boundary. The geodesic ray transform I of symmetric 2-tensor fields f is
A SHARP STABILITY ESTIMATE IN TENSOR TOMOGRAPHY PLAMEN STEFANOV 1. Introduction Let (M, g) be a compact Riemannian manifold with boundary. The geodesic ray transform I of symmetric 2-tensor fields f is
GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN
 ON THE RANGE OF THE ATTENUATED RAY TRANSFORM FOR UNITARY CONNECTIONS GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN Abstract. We describe the range of the attenuated ray transform of a unitary connection
ON THE RANGE OF THE ATTENUATED RAY TRANSFORM FOR UNITARY CONNECTIONS GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN Abstract. We describe the range of the attenuated ray transform of a unitary connection
An inverse source problem in optical molecular imaging
 An inverse source problem in optical molecular imaging Plamen Stefanov 1 Gunther Uhlmann 2 1 2 University of Washington Formulation Direct Problem Singular Operators Inverse Problem Proof Conclusion Figure:
An inverse source problem in optical molecular imaging Plamen Stefanov 1 Gunther Uhlmann 2 1 2 University of Washington Formulation Direct Problem Singular Operators Inverse Problem Proof Conclusion Figure:
Microlocal Methods in X-ray Tomography
 Microlocal Methods in X-ray Tomography Plamen Stefanov Purdue University Lecture I: Euclidean X-ray tomography Mini Course, Fields Institute, 2012 Plamen Stefanov (Purdue University ) Microlocal Methods
Microlocal Methods in X-ray Tomography Plamen Stefanov Purdue University Lecture I: Euclidean X-ray tomography Mini Course, Fields Institute, 2012 Plamen Stefanov (Purdue University ) Microlocal Methods
The X-ray transform for a non-abelian connection in two dimensions
 The X-ray transform for a non-abelian connection in two dimensions David Finch Department of Mathematics Oregon State University Corvallis, OR, 97331, USA Gunther Uhlmann Department of Mathematics University
The X-ray transform for a non-abelian connection in two dimensions David Finch Department of Mathematics Oregon State University Corvallis, OR, 97331, USA Gunther Uhlmann Department of Mathematics University
Efficient Solution Methods for Inverse Problems with Application to Tomography Radon Transform and Friends
 Efficient Solution Methods for Inverse Problems with Application to Tomography Radon Transform and Friends Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken
Efficient Solution Methods for Inverse Problems with Application to Tomography Radon Transform and Friends Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken
arxiv: v1 [math.dg] 27 Jul 2018
![arxiv: v1 [math.dg] 27 Jul 2018](/thumbs/84/89833928.jpg "arxiv: v1 [math.dg] 27 Jul 2018") arxiv:87.73v [math.dg] 27 Jul 28 On s-injective and injective ray transforms of tensor fields on surfaces Venkateswaran P. Krishnan Rohit Kumar Mishra François Monard July 3, 28 Abstract We first give
arxiv:87.73v [math.dg] 27 Jul 28 On s-injective and injective ray transforms of tensor fields on surfaces Venkateswaran P. Krishnan Rohit Kumar Mishra François Monard July 3, 28 Abstract We first give
Travel Time Tomography and Tensor Tomography, I
 Travel Time Tomography and Tensor Tomography, I Plamen Stefanov Purdue University Mini Course, MSRI 2009 Plamen Stefanov (Purdue University ) Travel Time Tomography and Tensor Tomography, I 1 / 17 Alternative
Travel Time Tomography and Tensor Tomography, I Plamen Stefanov Purdue University Mini Course, MSRI 2009 Plamen Stefanov (Purdue University ) Travel Time Tomography and Tensor Tomography, I 1 / 17 Alternative
Toward imaging modalities with high(er) resolution
 resolution") Toward imaging modalities with high(er) resolution François Monard Department of Mathematics, University of Michigan February 9, 2016 University of North Carolina at Charlotte Introduction Topic du jour
Toward imaging modalities with high(er) resolution François Monard Department of Mathematics, University of Michigan February 9, 2016 University of North Carolina at Charlotte Introduction Topic du jour
On stable inversion of the attenuated Radon transform with half data Jan Boman. We shall consider weighted Radon transforms of the form
 On stable inversion of the attenuated Radon transform with half data Jan Boman We shall consider weighted Radon transforms of the form R ρ f(l) = f(x)ρ(x, L)ds, L where ρ is a given smooth, positive weight
On stable inversion of the attenuated Radon transform with half data Jan Boman We shall consider weighted Radon transforms of the form R ρ f(l) = f(x)ρ(x, L)ds, L where ρ is a given smooth, positive weight
1. Geometry of the unit tangent bundle
 1 1. Geometry of the unit tangent bundle The main reference for this section is [8]. In the following, we consider (M, g) an n-dimensional smooth manifold endowed with a Riemannian metric g. 1.1. Notations
1 1. Geometry of the unit tangent bundle The main reference for this section is [8]. In the following, we consider (M, g) an n-dimensional smooth manifold endowed with a Riemannian metric g. 1.1. Notations
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail.
 This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Paternain, Gabriel P.; Salo, Mikko; Uhlmann, Gunther Title:
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Paternain, Gabriel P.; Salo, Mikko; Uhlmann, Gunther Title:
arxiv: v2 [math.ap] 13 Sep 2015
![arxiv: v2 [math.ap] 13 Sep 2015](/thumbs/87/96785326.jpg "arxiv: v2 [math.ap] 13 Sep 2015") THE X-RAY TRANSFORM FOR CONNECTIONS IN NEGATIVE CURVATURE COLIN GUILLARMOU, GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN arxiv:1502.04720v2 [math.ap] 13 Sep 2015 Abstract. We consider integral
THE X-RAY TRANSFORM FOR CONNECTIONS IN NEGATIVE CURVATURE COLIN GUILLARMOU, GABRIEL P. PATERNAIN, MIKKO SALO, AND GUNTHER UHLMANN arxiv:1502.04720v2 [math.ap] 13 Sep 2015 Abstract. We consider integral
Elliptic Regularity. Throughout we assume all vector bundles are smooth bundles with metrics over a Riemannian manifold X n.
 Elliptic Regularity Throughout we assume all vector bundles are smooth bundles with metrics over a Riemannian manifold X n. 1 Review of Hodge Theory In this note I outline the proof of the following Fundamental
Elliptic Regularity Throughout we assume all vector bundles are smooth bundles with metrics over a Riemannian manifold X n. 1 Review of Hodge Theory In this note I outline the proof of the following Fundamental
Non-abelian Radon transform and its applications
 Non-abelian Radon transform and its applications Roman Novikov CNRS, Centre de Mathématiques Appliquées, Ecole Polytechnique March 23, 2017 1/25 Consider the equation θ x ψ +A(x,θ)ψ = 0, x R d, θ S d 1,
Non-abelian Radon transform and its applications Roman Novikov CNRS, Centre de Mathématiques Appliquées, Ecole Polytechnique March 23, 2017 1/25 Consider the equation θ x ψ +A(x,θ)ψ = 0, x R d, θ S d 1,
Geometry and Inverse problems
 Geometry and Inverse problems Gabriel P. Paternain (University of Cambridge), Mikko Salo (University of Jyväskylä), Gunther Uhlmann (University of Washington) September 15, 2013 September 20, 2013 1 Overview
Geometry and Inverse problems Gabriel P. Paternain (University of Cambridge), Mikko Salo (University of Jyväskylä), Gunther Uhlmann (University of Washington) September 15, 2013 September 20, 2013 1 Overview
arxiv: v2 [math.dg] 26 Feb 2017
![arxiv: v2 [math.dg] 26 Feb 2017](/thumbs/96/127771229.jpg "arxiv: v2 [math.dg] 26 Feb 2017") LOCAL AND GLOBAL BOUNDARY RIGIDITY AND THE GEODESIC X-RAY TRANSFORM IN THE NORMAL GAUGE PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY arxiv:170203638v2 [mathdg] 26 Feb 2017 Abstract In this paper we
LOCAL AND GLOBAL BOUNDARY RIGIDITY AND THE GEODESIC X-RAY TRANSFORM IN THE NORMAL GAUGE PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY arxiv:170203638v2 [mathdg] 26 Feb 2017 Abstract In this paper we
Microlocal analysis and inverse problems Lecture 4 : Uniqueness results in admissible geometries
 Microlocal analysis and inverse problems Lecture 4 : Uniqueness results in admissible geometries David Dos Santos Ferreira LAGA Université de Paris 13 Wednesday May 18 Instituto de Ciencias Matemáticas,
Microlocal analysis and inverse problems Lecture 4 : Uniqueness results in admissible geometries David Dos Santos Ferreira LAGA Université de Paris 13 Wednesday May 18 Instituto de Ciencias Matemáticas,
arxiv: v1 [math.dg] 24 Feb 2017
![arxiv: v1 [math.dg] 24 Feb 2017](/thumbs/75/71551753.jpg "arxiv: v1 [math.dg] 24 Feb 2017") GEODESIC X-RAY TOMOGRAPHY FOR PIECEWISE CONSTANT FUNCTIONS ON NONTRAPPING MANIFOLDS JOONAS ILMAVIRTA, JERE LEHTONEN, AND MIKKO SALO arxiv:1702.07622v1 [math.dg] 24 Feb 2017 Abstract. We show that on a
GEODESIC X-RAY TOMOGRAPHY FOR PIECEWISE CONSTANT FUNCTIONS ON NONTRAPPING MANIFOLDS JOONAS ILMAVIRTA, JERE LEHTONEN, AND MIKKO SALO arxiv:1702.07622v1 [math.dg] 24 Feb 2017 Abstract. We show that on a
The spectral action for Dirac operators with torsion
 The spectral action for Dirac operators with torsion Christoph A. Stephan joint work with Florian Hanisch & Frank Pfäffle Institut für athematik Universität Potsdam Tours, ai 2011 1 Torsion Geometry, Einstein-Cartan-Theory
The spectral action for Dirac operators with torsion Christoph A. Stephan joint work with Florian Hanisch & Frank Pfäffle Institut für athematik Universität Potsdam Tours, ai 2011 1 Torsion Geometry, Einstein-Cartan-Theory
LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE
 LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE TOMOGRAPHY Jürgen Frikel 4 LECTURES 1 Today: Introduction to the mathematics of computerized tomography 2 Mathematics of computerized tomography
LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE TOMOGRAPHY Jürgen Frikel 4 LECTURES 1 Today: Introduction to the mathematics of computerized tomography 2 Mathematics of computerized tomography
Short note on compact operators - Monday 24 th March, Sylvester Eriksson-Bique
 Short note on compact operators - Monday 24 th March, 2014 Sylvester Eriksson-Bique 1 Introduction In this note I will give a short outline about the structure theory of compact operators. I restrict attention
Short note on compact operators - Monday 24 th March, 2014 Sylvester Eriksson-Bique 1 Introduction In this note I will give a short outline about the structure theory of compact operators. I restrict attention
Geometry and the Kato square root problem
 Geometry and the Kato square root problem Lashi Bandara Centre for Mathematics and its Applications Australian National University 7 June 2013 Geometric Analysis Seminar University of Wollongong Lashi
Geometry and the Kato square root problem Lashi Bandara Centre for Mathematics and its Applications Australian National University 7 June 2013 Geometric Analysis Seminar University of Wollongong Lashi
RECENT PROGRESS ON THE BOUNDARY RIGIDITY PROBLEM
 ELECTRONIC RESEARCH ANNOUNCEMENTS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Pages 000 000 (Xxxx XX, XXXX) S 1079-6762(XX)0000-0 RECENT PROGRESS ON THE BOUNDARY RIGIDITY PROBLEM PLAMEN STEFANOV AND
ELECTRONIC RESEARCH ANNOUNCEMENTS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 00, Pages 000 000 (Xxxx XX, XXXX) S 1079-6762(XX)0000-0 RECENT PROGRESS ON THE BOUNDARY RIGIDITY PROBLEM PLAMEN STEFANOV AND
Inverse problems for hyperbolic PDEs
 Inverse problems for hyperbolic PDEs Lauri Oksanen University College London Example: inverse problem for the wave equation Let c be a smooth function on Ω R n and consider the wave equation t 2 u c 2
Inverse problems for hyperbolic PDEs Lauri Oksanen University College London Example: inverse problem for the wave equation Let c be a smooth function on Ω R n and consider the wave equation t 2 u c 2
LOCAL AND GLOBAL BOUNDARY RIGIDITY AND THE GEODESIC X-RAY TRANSFORM IN THE NORMAL GAUGE
 LOCAL AND GLOBAL BOUNDARY RIGIDITY AND THE GEODESIC X-RAY TRANSFORM IN THE NORMAL GAUGE PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY Abstract In this paper we analyze the local and global boundary
LOCAL AND GLOBAL BOUNDARY RIGIDITY AND THE GEODESIC X-RAY TRANSFORM IN THE NORMAL GAUGE PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY Abstract In this paper we analyze the local and global boundary
Poincaré Duality Angles on Riemannian Manifolds with Boundary
 Poincaré Duality Angles on Riemannian Manifolds with Boundary Clayton Shonkwiler Department of Mathematics University of Pennsylvania June 5, 2009 Realizing cohomology groups as spaces of differential
Poincaré Duality Angles on Riemannian Manifolds with Boundary Clayton Shonkwiler Department of Mathematics University of Pennsylvania June 5, 2009 Realizing cohomology groups as spaces of differential
The purpose of this lecture is to present a few applications of conformal mappings in problems which arise in physics and engineering.
 Lecture 16 Applications of Conformal Mapping MATH-GA 451.001 Complex Variables The purpose of this lecture is to present a few applications of conformal mappings in problems which arise in physics and
Lecture 16 Applications of Conformal Mapping MATH-GA 451.001 Complex Variables The purpose of this lecture is to present a few applications of conformal mappings in problems which arise in physics and
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD
 INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
Hyperbolic Geometry on Geometric Surfaces
 Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
THE GEODESIC RAY TRANSFORM ON RIEMANNIAN SURFACES WITH CONJUGATE POINTS
 THE GEODESIC RAY TRANSFORM ON RIEMANNIAN SURFACES WITH CONJUGATE POINTS FRANÇOIS MONARD, PLAMEN STEFANOV, AND GUNTHER UHLMANN Abstract. We study the geodesic X-ray transform X on compact Riemannian surfaces
THE GEODESIC RAY TRANSFORM ON RIEMANNIAN SURFACES WITH CONJUGATE POINTS FRANÇOIS MONARD, PLAMEN STEFANOV, AND GUNTHER UHLMANN Abstract. We study the geodesic X-ray transform X on compact Riemannian surfaces
An Invitation to Geometric Quantization
 An Invitation to Geometric Quantization Alex Fok Department of Mathematics, Cornell University April 2012 What is quantization? Quantization is a process of associating a classical mechanical system to
An Invitation to Geometric Quantization Alex Fok Department of Mathematics, Cornell University April 2012 What is quantization? Quantization is a process of associating a classical mechanical system to
Inverse Transport Problems (Generalized) Stability Estimates. Guillaume Bal
 Stability Estimates. Guillaume Bal") Inverse Transport Problems (Generalized) Stability Estimates Guillaume Bal Department of Applied Physics & Applied Mathematics Columbia University Joint with Alexandre Jollivet Data Acquisition in CT-scan
Inverse Transport Problems (Generalized) Stability Estimates Guillaume Bal Department of Applied Physics & Applied Mathematics Columbia University Joint with Alexandre Jollivet Data Acquisition in CT-scan
Part 2 Introduction to Microlocal Analysis
 Part 2 Introduction to Microlocal Analysis Birsen Yazıcı & Venky Krishnan Rensselaer Polytechnic Institute Electrical, Computer and Systems Engineering August 2 nd, 2010 Outline PART II Pseudodifferential
Part 2 Introduction to Microlocal Analysis Birsen Yazıcı & Venky Krishnan Rensselaer Polytechnic Institute Electrical, Computer and Systems Engineering August 2 nd, 2010 Outline PART II Pseudodifferential
THE CALDERÓN PROBLEM FOR CONNECTIONS. Mihajlo Cekić
 THE CALDERÓN PROBLEM FOR CONNECTIONS Mihajlo Cekić Trinity College and Department of Pure Mathematics and Mathematical Statistics University of Cambridge The dissertation is submitted for the degree of
THE CALDERÓN PROBLEM FOR CONNECTIONS Mihajlo Cekić Trinity College and Department of Pure Mathematics and Mathematical Statistics University of Cambridge The dissertation is submitted for the degree of
Part 2 Introduction to Microlocal Analysis
 Part 2 Introduction to Microlocal Analysis Birsen Yazıcı& Venky Krishnan Rensselaer Polytechnic Institute Electrical, Computer and Systems Engineering March 15 th, 2010 Outline PART II Pseudodifferential(ψDOs)
Part 2 Introduction to Microlocal Analysis Birsen Yazıcı& Venky Krishnan Rensselaer Polytechnic Institute Electrical, Computer and Systems Engineering March 15 th, 2010 Outline PART II Pseudodifferential(ψDOs)
Feature Reconstruction in Tomography
 Feature Reconstruction in Tomography Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken http://www.num.uni-sb.de louis@num.uni-sb.de Wien, July 20, 2009 Images
Feature Reconstruction in Tomography Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken http://www.num.uni-sb.de louis@num.uni-sb.de Wien, July 20, 2009 Images
The oblique derivative problem for general elliptic systems in Lipschitz domains
 M. MITREA The oblique derivative problem for general elliptic systems in Lipschitz domains Let M be a smooth, oriented, connected, compact, boundaryless manifold of real dimension m, and let T M and T
M. MITREA The oblique derivative problem for general elliptic systems in Lipschitz domains Let M be a smooth, oriented, connected, compact, boundaryless manifold of real dimension m, and let T M and T
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
Optical Tomography on Simple Riemannian Surfaces
 Communications in Partial Differential Equations, 3: 379 4, 25 Copyright Taylor & Francis, Inc. ISSN 36-532 print/532-433 online DOI:.8/36535258923 Optical Tomography on Simple Riemannian Surfaces STEPHEN
Communications in Partial Differential Equations, 3: 379 4, 25 Copyright Taylor & Francis, Inc. ISSN 36-532 print/532-433 online DOI:.8/36535258923 Optical Tomography on Simple Riemannian Surfaces STEPHEN
Inverse Transport Problems and Applications. II. Optical Tomography and Clear Layers. Guillaume Bal
 Inverse Transport Problems and Applications II. Optical Tomography and Clear Layers Guillaume Bal Department of Applied Physics & Applied Mathematics Columbia University http://www.columbia.edu/ gb23 gb23@columbia.edu
Inverse Transport Problems and Applications II. Optical Tomography and Clear Layers Guillaume Bal Department of Applied Physics & Applied Mathematics Columbia University http://www.columbia.edu/ gb23 gb23@columbia.edu
Microlocal analysis and inverse problems Lecture 3 : Carleman estimates
 Microlocal analysis and inverse problems ecture 3 : Carleman estimates David Dos Santos Ferreira AGA Université de Paris 13 Monday May 16 Instituto de Ciencias Matemáticas, Madrid David Dos Santos Ferreira
Microlocal analysis and inverse problems ecture 3 : Carleman estimates David Dos Santos Ferreira AGA Université de Paris 13 Monday May 16 Instituto de Ciencias Matemáticas, Madrid David Dos Santos Ferreira
Geometry and the Kato square root problem
 Geometry and the Kato square root problem Lashi Bandara Centre for Mathematics and its Applications Australian National University 7 June 2013 Geometric Analysis Seminar University of Wollongong Lashi
Geometry and the Kato square root problem Lashi Bandara Centre for Mathematics and its Applications Australian National University 7 June 2013 Geometric Analysis Seminar University of Wollongong Lashi
arxiv: v2 [math.ap] 27 Jul 2016
![arxiv: v2 [math.ap] 27 Jul 2016](/thumbs/73/69421189.jpg "arxiv: v2 [math.ap] 27 Jul 2016") THE BROKEN RAY TRANSFORM IN n DIMENSIONS WITH FLAT REFLECTING BOUNDARY MARK HUBENTHAL arxiv:1310.7156v2 [math.ap] 27 Jul 2016 Abstract. We study the broken ray transform on n-dimensional Euclidean domains
THE BROKEN RAY TRANSFORM IN n DIMENSIONS WITH FLAT REFLECTING BOUNDARY MARK HUBENTHAL arxiv:1310.7156v2 [math.ap] 27 Jul 2016 Abstract. We study the broken ray transform on n-dimensional Euclidean domains
INVERTING THE LOCAL GEODESIC X-RAY TRANSFORM ON TENSORS
 INVERTING THE LOCAL GEODESIC X-RAY TRANSFORM ON TENSORS PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY Abstract We prove the local invertibility, up to potential fields, and stability of the geodesic
INVERTING THE LOCAL GEODESIC X-RAY TRANSFORM ON TENSORS PLAMEN STEFANOV, GUNTHER UHLMANN AND ANDRÁS VASY Abstract We prove the local invertibility, up to potential fields, and stability of the geodesic
Introduction to the Baum-Connes conjecture
 Introduction to the Baum-Connes conjecture Nigel Higson, John Roe PSU NCGOA07 Nigel Higson, John Roe (PSU) Introduction to the Baum-Connes conjecture NCGOA07 1 / 15 History of the BC conjecture Lecture
Introduction to the Baum-Connes conjecture Nigel Higson, John Roe PSU NCGOA07 Nigel Higson, John Roe (PSU) Introduction to the Baum-Connes conjecture NCGOA07 1 / 15 History of the BC conjecture Lecture
Rough metrics, the Kato square root problem, and the continuity of a flow tangent to the Ricci flow
 Rough metrics, the Kato square root problem, and the continuity of a flow tangent to the Ricci flow Lashi Bandara Mathematical Sciences Chalmers University of Technology and University of Gothenburg 22
Rough metrics, the Kato square root problem, and the continuity of a flow tangent to the Ricci flow Lashi Bandara Mathematical Sciences Chalmers University of Technology and University of Gothenburg 22
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW
 THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
Lecture Notes on PDEs
 Lecture Notes on PDEs Alberto Bressan February 26, 2012 1 Elliptic equations Let IR n be a bounded open set Given measurable functions a ij, b i, c : IR, consider the linear, second order differential
Lecture Notes on PDEs Alberto Bressan February 26, 2012 1 Elliptic equations Let IR n be a bounded open set Given measurable functions a ij, b i, c : IR, consider the linear, second order differential
Uniformization in several complex variables.
 Uniformization in several complex variables. Grenoble. April, 16, 2009. Transmitted to IMPA (Rio de Janeiro). Philippe Eyssidieux. Institut Fourier, Université Joseph Fourier (Grenoble 1). 1 The uniformization
Uniformization in several complex variables. Grenoble. April, 16, 2009. Transmitted to IMPA (Rio de Janeiro). Philippe Eyssidieux. Institut Fourier, Université Joseph Fourier (Grenoble 1). 1 The uniformization
Infinitesimal Einstein Deformations. Kähler Manifolds
 on Nearly Kähler Manifolds (joint work with P.-A. Nagy and U. Semmelmann) Gemeinsame Jahrestagung DMV GDM Berlin, March 30, 2007 Nearly Kähler manifolds Definition and first properties Examples of NK manifolds
on Nearly Kähler Manifolds (joint work with P.-A. Nagy and U. Semmelmann) Gemeinsame Jahrestagung DMV GDM Berlin, March 30, 2007 Nearly Kähler manifolds Definition and first properties Examples of NK manifolds
On the exponential map on Riemannian polyhedra by Monica Alice Aprodu. Abstract
 Bull. Math. Soc. Sci. Math. Roumanie Tome 60 (108) No. 3, 2017, 233 238 On the exponential map on Riemannian polyhedra by Monica Alice Aprodu Abstract We prove that Riemannian polyhedra admit explicit
Bull. Math. Soc. Sci. Math. Roumanie Tome 60 (108) No. 3, 2017, 233 238 On the exponential map on Riemannian polyhedra by Monica Alice Aprodu Abstract We prove that Riemannian polyhedra admit explicit
Gradient Estimates and Sobolev Inequality
 Gradient Estimates and Sobolev Inequality Jiaping Wang University of Minnesota ( Joint work with Linfeng Zhou) Conference on Geometric Analysis in honor of Peter Li University of California, Irvine January
Gradient Estimates and Sobolev Inequality Jiaping Wang University of Minnesota ( Joint work with Linfeng Zhou) Conference on Geometric Analysis in honor of Peter Li University of California, Irvine January
Transport Continuity Property
 On Riemannian manifolds satisfying the Transport Continuity Property Université de Nice - Sophia Antipolis (Joint work with A. Figalli and C. Villani) I. Statement of the problem Optimal transport on Riemannian
On Riemannian manifolds satisfying the Transport Continuity Property Université de Nice - Sophia Antipolis (Joint work with A. Figalli and C. Villani) I. Statement of the problem Optimal transport on Riemannian
arxiv: v1 [math.dg] 7 Jan 2019
![arxiv: v1 [math.dg] 7 Jan 2019](/thumbs/93/112461858.jpg "arxiv: v1 [math.dg] 7 Jan 2019") RECONSTRUCTION OF PIECEWISE CONSTANT FUNCTIONS FROM X-RAY DATA arxiv:1901.01909v1 [math.dg] 7 Jan 2019 VADIM LEBOVICI Abstract. We show that on a two-dimensional compact nontrapping Riemannian manifold
RECONSTRUCTION OF PIECEWISE CONSTANT FUNCTIONS FROM X-RAY DATA arxiv:1901.01909v1 [math.dg] 7 Jan 2019 VADIM LEBOVICI Abstract. We show that on a two-dimensional compact nontrapping Riemannian manifold
The inverse conductivity problem with power densities in dimension n 2
 The inverse conductivity problem with power densities in dimension n 2 François Monard Guillaume Bal Dept. of Applied Physics and Applied Mathematics, Columbia University. June 19th, 2012 UC Irvine Conference
The inverse conductivity problem with power densities in dimension n 2 François Monard Guillaume Bal Dept. of Applied Physics and Applied Mathematics, Columbia University. June 19th, 2012 UC Irvine Conference
Lecture 6: Principal bundles
 Lecture 6: Principal bundles Jonathan Evans 6th October 2010 Jonathan Evans () Lecture 6: Principal bundles 6th October 2010 1 / 12 Jonathan Evans () Lecture 6: Principal bundles 6th October 2010 2 / 12
Lecture 6: Principal bundles Jonathan Evans 6th October 2010 Jonathan Evans () Lecture 6: Principal bundles 6th October 2010 1 / 12 Jonathan Evans () Lecture 6: Principal bundles 6th October 2010 2 / 12
Exercise 1 (Formula for connection 1-forms) Using the first structure equation, show that
 Using the first structure equation, show that") 1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
Gravitation: Tensor Calculus
 An Introduction to General Relativity Center for Relativistic Astrophysics School of Physics Georgia Institute of Technology Notes based on textbook: Spacetime and Geometry by S.M. Carroll Spring 2013
An Introduction to General Relativity Center for Relativistic Astrophysics School of Physics Georgia Institute of Technology Notes based on textbook: Spacetime and Geometry by S.M. Carroll Spring 2013
Hyperbolic inverse problems and exact controllability
 Hyperbolic inverse problems and exact controllability Lauri Oksanen University College London An inverse initial source problem Let M R n be a compact domain with smooth strictly convex boundary, and let
Hyperbolic inverse problems and exact controllability Lauri Oksanen University College London An inverse initial source problem Let M R n be a compact domain with smooth strictly convex boundary, and let
GEOMETRICAL TOOLS FOR PDES ON A SURFACE WITH ROTATING SHALLOW WATER EQUATIONS ON A SPHERE
 GEOETRICAL TOOLS FOR PDES ON A SURFACE WITH ROTATING SHALLOW WATER EQUATIONS ON A SPHERE BIN CHENG Abstract. This is an excerpt from my paper with A. ahalov [1]. PDE theories with Riemannian geometry are
GEOETRICAL TOOLS FOR PDES ON A SURFACE WITH ROTATING SHALLOW WATER EQUATIONS ON A SPHERE BIN CHENG Abstract. This is an excerpt from my paper with A. ahalov [1]. PDE theories with Riemannian geometry are
Quantising noncompact Spin c -manifolds
 Quantising noncompact Spin c -manifolds Peter Hochs University of Adelaide Workshop on Positive Curvature and Index Theory National University of Singapore, 20 November 2014 Peter Hochs (UoA) Noncompact
Quantising noncompact Spin c -manifolds Peter Hochs University of Adelaide Workshop on Positive Curvature and Index Theory National University of Singapore, 20 November 2014 Peter Hochs (UoA) Noncompact
Stability of the Gauge Equivalent Classes in Inverse Stationary Transport in Refractive Media
 Stability of the Gauge Equivalent Classes in Inverse Stationary Transport in Refractive Media Stephen McDowall, Plamen Stefanov, and Alexandru Tamasan Abstract. In the inverse stationary transport problem
Stability of the Gauge Equivalent Classes in Inverse Stationary Transport in Refractive Media Stephen McDowall, Plamen Stefanov, and Alexandru Tamasan Abstract. In the inverse stationary transport problem
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
REPRESENTATION THEORY WEEK 7
 REPRESENTATION THEORY WEEK 7 1. Characters of L k and S n A character of an irreducible representation of L k is a polynomial function constant on every conjugacy class. Since the set of diagonalizable
REPRESENTATION THEORY WEEK 7 1. Characters of L k and S n A character of an irreducible representation of L k is a polynomial function constant on every conjugacy class. Since the set of diagonalizable
HYPERKÄHLER MANIFOLDS
 HYPERKÄHLER MANIFOLDS PAVEL SAFRONOV, TALK AT 2011 TALBOT WORKSHOP 1.1. Basic definitions. 1. Hyperkähler manifolds Definition. A hyperkähler manifold is a C Riemannian manifold together with three covariantly
HYPERKÄHLER MANIFOLDS PAVEL SAFRONOV, TALK AT 2011 TALBOT WORKSHOP 1.1. Basic definitions. 1. Hyperkähler manifolds Definition. A hyperkähler manifold is a C Riemannian manifold together with three covariantly
ROI Reconstruction in CT
 Reconstruction in CT From Tomo reconstruction in the 21st centery, IEEE Sig. Proc. Magazine (R.Clackdoyle M.Defrise) L. Desbat TIMC-IMAG September 10, 2013 L. Desbat Reconstruction in CT Outline 1 CT Radiology
Reconstruction in CT From Tomo reconstruction in the 21st centery, IEEE Sig. Proc. Magazine (R.Clackdoyle M.Defrise) L. Desbat TIMC-IMAG September 10, 2013 L. Desbat Reconstruction in CT Outline 1 CT Radiology
GAUGE EQUIVALENCE IN STATIONARY RADIATIVE TRANSPORT THROUGH MEDIA WITH VARYING INDEX OF REFRACTION. Stephen McDowall.
 Inverse Problems and Imaging Volume 4, No. 1, 21, 151 167 doi:1.3934/ipi.21.4.151 GAUGE EQUIVALENCE IN STATIONARY RADIATIVE TRANSPORT THROUGH MEDIA WITH VARYING INDEX OF REFRACTION Stephen McDowall Department
Inverse Problems and Imaging Volume 4, No. 1, 21, 151 167 doi:1.3934/ipi.21.4.151 GAUGE EQUIVALENCE IN STATIONARY RADIATIVE TRANSPORT THROUGH MEDIA WITH VARYING INDEX OF REFRACTION Stephen McDowall Department
The Radon transform. Chris Stolk. December 18, 2014
 The Radon transform Chris Stolk December 18, 2014 1 Introduction In two dimensions the Radon transform is an integral transform that maps a function to its integrals over lines. Let θ S 1 and s R then
The Radon transform Chris Stolk December 18, 2014 1 Introduction In two dimensions the Radon transform is an integral transform that maps a function to its integrals over lines. Let θ S 1 and s R then
Index theory on manifolds with corners: Generalized Gauss-Bonnet formulas
 Index theory on singular manifolds I p. 1/4 Index theory on singular manifolds I Index theory on manifolds with corners: Generalized Gauss-Bonnet formulas Paul Loya Index theory on singular manifolds I
Index theory on singular manifolds I p. 1/4 Index theory on singular manifolds I Index theory on manifolds with corners: Generalized Gauss-Bonnet formulas Paul Loya Index theory on singular manifolds I
Vortex Equations on Riemannian Surfaces
 Vortex Equations on Riemannian Surfaces Amanda Hood, Khoa Nguyen, Joseph Shao Advisor: Chris Woodward Vortex Equations on Riemannian Surfaces p.1/36 Introduction Yang Mills equations: originated from electromagnetism
Vortex Equations on Riemannian Surfaces Amanda Hood, Khoa Nguyen, Joseph Shao Advisor: Chris Woodward Vortex Equations on Riemannian Surfaces p.1/36 Introduction Yang Mills equations: originated from electromagnetism
f (t) K(t, u) d t. f (t) K 1 (t, u) d u. Integral Transform Inverse Fourier Transform
 K(t, u) d t. f (t) K 1 (t, u) d u. Integral Transform Inverse Fourier Transform") Integral Transforms Massoud Malek An integral transform maps an equation from its original domain into another domain, where it might be manipulated and solved much more easily than in the original domain.
Integral Transforms Massoud Malek An integral transform maps an equation from its original domain into another domain, where it might be manipulated and solved much more easily than in the original domain.
Iterative regularization of nonlinear ill-posed problems in Banach space
 Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
Adiabatic limits and eigenvalues
 Adiabatic limits and eigenvalues Gunther Uhlmann s 60th birthday meeting Richard Melrose Department of Mathematics Massachusetts Institute of Technology 22 June, 2012 Outline Introduction 1 Adiabatic metrics
Adiabatic limits and eigenvalues Gunther Uhlmann s 60th birthday meeting Richard Melrose Department of Mathematics Massachusetts Institute of Technology 22 June, 2012 Outline Introduction 1 Adiabatic metrics
Chapter 7: Bounded Operators in Hilbert Spaces
 Chapter 7: Bounded Operators in Hilbert Spaces I-Liang Chern Department of Applied Mathematics National Chiao Tung University and Department of Mathematics National Taiwan University Fall, 2013 1 / 84
Chapter 7: Bounded Operators in Hilbert Spaces I-Liang Chern Department of Applied Mathematics National Chiao Tung University and Department of Mathematics National Taiwan University Fall, 2013 1 / 84
L 2 Geometry of the Symplectomorphism Group
 University of Notre Dame Workshop on Innite Dimensional Geometry, Vienna 2015 Outline 1 The Exponential Map on D s ω(m) 2 Existence of Multiplicity of Outline 1 The Exponential Map on D s ω(m) 2 Existence
University of Notre Dame Workshop on Innite Dimensional Geometry, Vienna 2015 Outline 1 The Exponential Map on D s ω(m) 2 Existence of Multiplicity of Outline 1 The Exponential Map on D s ω(m) 2 Existence
Inverse problems in statistics
 Inverse problems in statistics Laurent Cavalier (Université Aix-Marseille 1, France) YES, Eurandom, 10 October 2011 p. 1/27 Table of contents YES, Eurandom, 10 October 2011 p. 2/27 Table of contents 1)
Inverse problems in statistics Laurent Cavalier (Université Aix-Marseille 1, France) YES, Eurandom, 10 October 2011 p. 1/27 Table of contents YES, Eurandom, 10 October 2011 p. 2/27 Table of contents 1)
INJECTIVITY RESULTS FOR THE GEODESIC RAY TRANSFORM
 UNIVERSITY OF JYVÄSKYLÄ DEPARTMENT OF MATHEMATICS AND STATISTICS REPORT 162 UNIVERSITÄT JYVÄSKYLÄ INSTITUT FÜR MATHEMATIK UND STATISTIK BERICHT 162 INJECTIVITY RESULTS FOR THE GEODESIC RAY TRANSFORM JERE
UNIVERSITY OF JYVÄSKYLÄ DEPARTMENT OF MATHEMATICS AND STATISTICS REPORT 162 UNIVERSITÄT JYVÄSKYLÄ INSTITUT FÜR MATHEMATIK UND STATISTIK BERICHT 162 INJECTIVITY RESULTS FOR THE GEODESIC RAY TRANSFORM JERE
TWISTOR AND KILLING FORMS IN RIEMANNIAN GEOMETRY
 TWISTOR AND KILLING FORMS IN RIEMANNIAN GEOMETRY Andrei Moroianu CNRS - Ecole Polytechnique Palaiseau Prague, September 1 st, 2004 joint work with Uwe Semmelmann Plan of the talk Algebraic preliminaries
TWISTOR AND KILLING FORMS IN RIEMANNIAN GEOMETRY Andrei Moroianu CNRS - Ecole Polytechnique Palaiseau Prague, September 1 st, 2004 joint work with Uwe Semmelmann Plan of the talk Algebraic preliminaries
Complex manifolds, Kahler metrics, differential and harmonic forms
 Complex manifolds, Kahler metrics, differential and harmonic forms Cattani June 16, 2010 1 Lecture 1 Definition 1.1 (Complex Manifold). A complex manifold is a manifold with coordinates holomorphic on
Complex manifolds, Kahler metrics, differential and harmonic forms Cattani June 16, 2010 1 Lecture 1 Definition 1.1 (Complex Manifold). A complex manifold is a manifold with coordinates holomorphic on
THE BOUNDARY RIGIDITY PROBLEM IN THE PRESENCE OF A MAGNETIC FIELD
 THE BOUNDARY RIGIDITY PROBLEM IN THE PRESENCE OF A MAGNETIC FIELD NURLAN S. DAIRBEKOV, GABRIEL P. PATERNAIN, PLAMEN STEFANOV, AND GUNTHER UHLMANN Abstract. For a compact Riemannian manifold with boundary,
THE BOUNDARY RIGIDITY PROBLEM IN THE PRESENCE OF A MAGNETIC FIELD NURLAN S. DAIRBEKOV, GABRIEL P. PATERNAIN, PLAMEN STEFANOV, AND GUNTHER UHLMANN Abstract. For a compact Riemannian manifold with boundary,
Nonlinear Flows for Displacement Correction and Applications in Tomography
 Nonlinear Flows for Displacement Correction and Applications in Tomography Guozhi Dong 1 and Otmar Scherzer 1,2 1 Computational Science Center, University of Vienna, Oskar-Morgenstern-Platz 1, 1090 Wien,
Nonlinear Flows for Displacement Correction and Applications in Tomography Guozhi Dong 1 and Otmar Scherzer 1,2 1 Computational Science Center, University of Vienna, Oskar-Morgenstern-Platz 1, 1090 Wien,
Invariance Theory, the Heat Equation, and the Atiyah-Singer Index Theorem
 PETER B. GILKEY Department of Mathematics, University of Oregon Invariance Theory, the Heat Equation, and the Atiyah-Singer Index Theorem Second Edition CRC PRESS Boca Raton Ann Arbor London Tokyo Contents
PETER B. GILKEY Department of Mathematics, University of Oregon Invariance Theory, the Heat Equation, and the Atiyah-Singer Index Theorem Second Edition CRC PRESS Boca Raton Ann Arbor London Tokyo Contents
Conformal field theory in the sense of Segal, modified for a supersymmetric context
 Conformal field theory in the sense of Segal, modified for a supersymmetric context Paul S Green January 27, 2014 1 Introduction In these notes, we will review and propose some revisions to the definition
Conformal field theory in the sense of Segal, modified for a supersymmetric context Paul S Green January 27, 2014 1 Introduction In these notes, we will review and propose some revisions to the definition
Eigenvalues and eigenfunctions of the Laplacian. Andrew Hassell
 Eigenvalues and eigenfunctions of the Laplacian Andrew Hassell 1 2 The setting In this talk I will consider the Laplace operator,, on various geometric spaces M. Here, M will be either a bounded Euclidean
Eigenvalues and eigenfunctions of the Laplacian Andrew Hassell 1 2 The setting In this talk I will consider the Laplace operator,, on various geometric spaces M. Here, M will be either a bounded Euclidean
MICROLOCAL ANALYSIS METHODS
 MICROLOCAL ANALYSIS METHODS PLAMEN STEFANOV One of the fundamental ideas of classical analysis is a thorough study of functions near a point, i.e., locally. Microlocal analysis, loosely speaking, is analysis
MICROLOCAL ANALYSIS METHODS PLAMEN STEFANOV One of the fundamental ideas of classical analysis is a thorough study of functions near a point, i.e., locally. Microlocal analysis, loosely speaking, is analysis
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail.
 This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Ilmavirta, Joonas Title: On Radon Transforms on Tori Year:
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Ilmavirta, Joonas Title: On Radon Transforms on Tori Year:
The Helmholtz Equation
 The Helmholtz Equation Seminar BEM on Wave Scattering Rene Rühr ETH Zürich October 28, 2010 Outline Steklov-Poincare Operator Helmholtz Equation: From the Wave equation to Radiation condition Uniqueness
The Helmholtz Equation Seminar BEM on Wave Scattering Rene Rühr ETH Zürich October 28, 2010 Outline Steklov-Poincare Operator Helmholtz Equation: From the Wave equation to Radiation condition Uniqueness
Inverse problems in statistics
 Inverse problems in statistics Laurent Cavalier (Université Aix-Marseille 1, France) Yale, May 2 2011 p. 1/35 Introduction There exist many fields where inverse problems appear Astronomy (Hubble satellite).
Inverse problems in statistics Laurent Cavalier (Université Aix-Marseille 1, France) Yale, May 2 2011 p. 1/35 Introduction There exist many fields where inverse problems appear Astronomy (Hubble satellite).
c Copyright 2015 Hanming Zhou
 c Copyright 2015 Hanming Zhou Some Linear and Nonlinear Geometric Inverse Problems Hanming Zhou A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
c Copyright 2015 Hanming Zhou Some Linear and Nonlinear Geometric Inverse Problems Hanming Zhou A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Error Estimates for Filtered Back Projection Matthias Beckmann and Armin Iske Nr. 2015-03 January 2015 Error Estimates for Filtered Back Projection Matthias
Hamburger Beiträge zur Angewandten Mathematik Error Estimates for Filtered Back Projection Matthias Beckmann and Armin Iske Nr. 2015-03 January 2015 Error Estimates for Filtered Back Projection Matthias
LOCAL LENS RIGIDITY WITH INCOMPLETE DATA FOR A CLASS OF NON-SIMPLE RIEMANNIAN MANIFOLDS
 LOCAL LENS RIGIDITY WITH INCOMPLETE DATA FOR A CLASS OF NON-SIMPLE RIEMANNIAN MANIFOLDS PLAMEN STEFANOV AND GUNTHER UHLMANN Abstract. Let σ be the scattering relation on a compact Riemannian manifold M
LOCAL LENS RIGIDITY WITH INCOMPLETE DATA FOR A CLASS OF NON-SIMPLE RIEMANNIAN MANIFOLDS PLAMEN STEFANOV AND GUNTHER UHLMANN Abstract. Let σ be the scattering relation on a compact Riemannian manifold M
Theorem 2. Let n 0 3 be a given integer. is rigid in the sense of Guillemin, so are all the spaces ḠR n,n, with n n 0.
 This monograph is motivated by a fundamental rigidity problem in Riemannian geometry: determine whether the metric of a given Riemannian symmetric space of compact type can be characterized by means of
This monograph is motivated by a fundamental rigidity problem in Riemannian geometry: determine whether the metric of a given Riemannian symmetric space of compact type can be characterized by means of