Physics 351 Monday, January 22, 2018
|
|
|
- Steven Owens
- 5 years ago
- Views:
Transcription
1 Physics 351 Monday, January 22, 2018
2 Phys 351 Work on this while you wait for your classmates to arrive: Show that the moment of inertia of a uniform solid sphere rotating about a diameter is I = 2 5 MR2. The integral is easiest in spherical polar coordinates, with the axis of rotation taken to be the z axis. Helpful hint: dv = r 2 dr d(cos θ) dφ. [For this problem, that form is simpler to use than the other form you may have seen, dv = r 2 dr sin θ dθ dφ But to account for the minus sign you then integrate from cos θ = 1 to cos θ = +1 instead of from θ = 0 to θ = π.]
3
4 Physics 351 Monday, January 22, 2018 Homework #1 due on Friday 1/26. Homework help sessions start Jan (Wed/Thu). After finishing up Friday s discussion of spherical polar coordinates, we ll spend the rest of this week on Ch 5 6. I m aiming to start Lagrangians by the end of Friday. You ve now read Chapters 1 6. The pace will calm down now, as we start the new material.
5 Taylor s Chapter 4 comment that in polar coordinates, a b = a r b r + a θ b θ + a φ b φ means that e.g. at one point on or near Earth s surface, you can set up an orthonormal local coordinate system and write ˆr = up unit vector ˆθ = south unit vector ˆφ = east unit vector Then I can write out the components of e.g. a force F and a displacement r in that orthonormal coordinate system and write e.g. Work = F r W = F up r up + F south r south + F east r east
6 z = r cos θ x = r sin θ cos φ y = r sin θ sin φ If I move dr up, and dθ south, and dφ east, what is my resulting displacement vector? d r = ˆrA + ˆθB + ˆφC What are A, B, and C? (All have dimensions of length.)
7 z = r cos θ x = r sin θ cos φ y = r sin θ sin φ If I move dr up, and dθ south, and dφ east, my displacement vector is d r = ˆr dr + ˆθ rdθ + ˆφ r sin θdφ (This is useful when computing the distance between two (nearby) terrestrial points, given their (latitude,longitude) geocodes.)
8
9
10
11 (You try it!)
12
13 (A central force exerted by Earth s center can have an up/down component but cannot have E/W or N/S components.)
14 (You can prove the converse as a future XC problem, if you wish.)
15 One point worth emphasizing from the end of Chapter 4 (Energy): For two particles interacting only with each other, U( r 1, r 2 ) = U( r 1 r 2 ) in this case, which implies U = U x 1 x 2 U = U y 1 y 2 F 2 = F 1 U = U z 1 z 2 Since there is no ext. force, this is just Newton #3: F12 = F 21 You know 3rd law momentum conservation Deep connection (Noether s theorem): translation invariance momentum conservation
16 Damped harmonic motion (b = linear drag coefficient from ch2): mẍ = kx bẋ let ω 0 = k/m let β = b/(2m) ẍ + 2βẋ + ω 2 0x = 0 This is a linear, 2nd order, homogeneous differential equation. Linear because x, ẋ, ẍ, etc. appear only as the first power, not e.g. ẋ 2, xẋ, x 2, sin(x), etc. More precisely, linear because we re applying a linear operator D to turn the variable x into the LHS: D = d2 dt 2 + 2β d dt + ω2 0 D[Ax 1 +Bx 2 ] = d2 dt 2 (Ax 1+Bx 2 ) + 2β d dt (Ax 1+Bx 2 ) + ω 2 0(Ax 1 +Bx 2 ) = Aẍ 1 + 2βAx 1 + Aω0x Bẍ 2 + 2βBx 2 + Bω0x 2 2 = AD[x 1 ] + BD[x 2 ]
17 The amazingly useful feature of linearity is that linearity permits us to use the superposition principle If we have two functions x 1 (t) and x 2 (t) that separately satisfy D[x 1 (t)] = 0 D[x 2 (t)] = 0 (where D is a linear operator) then a linear combination x 3 (t) = Ax 1 (t) + Bx 2 (t) will also satisfy D[x 3 (t)] = 0 So the superposition of several solutions is also a solution.
18 ẍ + 2βẋ + ω 2 0x = 0 is a linear, 2nd order, homogeneous differential equation. Second-order because the order of the highest derivative is 2. Any linear diff eq of order n has n independent solutions, i.e. general solution contains n arbitrary constants. Homogeneous because the RHS is zero. If the RHS is some f(t), we call this an inhomogeneous diff eq. We ll say this again later: The general solution to (inhomogeneous) D[x] = f(t) is the sum of any particular solution to D[x] = f(t) plus the general solution to D[x] = 0 We ll need that to study forced (or driven ) oscillations. Now back to our equation.
19 ẍ + 2βẋ + ω 2 0x = 0 Let s guess (!) a solution x(t) = Ae αt and plug it in: (α 2 + 2αβ + ω0) 2 Ae αt = 0 α = β ± β 2 ω0 2 So (except for the degenerate β = ω 0 case), we ve found our two independent solutions: x(t) = Ae βt e +Ωt + Be βt e Ωt where Ω = β 2 ω0 2. The most common case is weak damping ( underdamped ), where β < ω 0, so Ω 2 < 0. Then Ω = i ω0 2 β2 = iω 1 x(t) = e βt ( Ae iω 1t + Be iω 1t ) = Ce βt cos(ω 1 t + φ 0 ) If β = 0.2ω 0, then ω ω 0. If β = 0.1ω 0, then ω ω 0.
20 By suitable choice of A and B, we can ensure that x(t) is real, and that the arbitrary constants C and φ 0 are real. x(t) = e βt ( Ae iω1t + Be iω 1t ) = Ce βt cos(ω 1 t + φ 0 ) Digression: e iθ = cos θ + i sin θ cos θ = 1 2 (eiθ + e iθ ) sin θ = 1 2i (eiθ e iθ ) Re(z) = 1 2 (z + z ) Im(z) = 1 2i (z z ) By analogy, cosh θ = 1 2 (eθ + e θ ) sinh θ = 1 2 (eθ e θ ) So choosing A = 1 2 Ceiφ 0 and B = 1 2 Ce iφ 0 gives x(t) = Ce βt cos(ω 1 t + φ 0 ) where C and φ 0 are fixed by the initial conditions. ω 1 ( ω 0 ) and β are properties of the system. Quality factor Q = ω 0 /(2β).
21 x(t) = Ce βt cos(ω 1 t + φ 0 ) Q = ω 0 /(2β). energy(t) e 2βt = e ω 0t/Q = e 2πf 0t/Q = e 2πt/(QT 0) So after Q periods (t = QT 0 ), the energy has decreased by a factor e 2π Equivalently, Q 2π = energy stored in oscillator energy dissipated per cycle [First two Mathematica Manipulate[] demos.]
22 For the special case β = 0 ( no damping ), ω 1 = ω 0 : Ω = i ω0 2 β2 = i ω0 2 0 = iω 0 x(t) = Ae iω 0t + Be iω 0t = C cos(ω 0 t + φ 0 ) For the β > ω 0 strong damping ( overdamped ) case, Ω 2 > 0, Ω is real and nonzero: Ω = β 2 ω0 2. Then x(t) = Ae (β β 2 ω 2 0 )t + Be (β+ β 2 ω 2 0 )t The first term dominates the decay rate, since the second term decays away more quickly. Interestingly, in this overdamped regime, increasing β (more damping) actually makes the motion decay less quickly! Decay rate is largest at critical damping, Ω 2 = 0. Important for shock absorbers, indicator needles.
23 Critical damping (Ω 2 = 0): Our previous procedure now gives us only one solution: β ± β 2 ω 2 0 = β x(t) = Ae βt There must be a second solution to Let s try another lucky guess: ẍ + 2βẋ + β 2 x = 0 x = Bte βt ẋ = Be βt βbte βt ẍ = βbe βt βbe βt + β 2 Bte βt ẍ = 2βBe βt + β 2 Bte βt 2βẋ = 2βBe βt 2β 2 Bte βt β 2 x = β 2 Bte βt which add up to zero. So we have x(t) = (A + Bt)e βt
24 Rate of exponential decay (e.g. 1/τ) vs. damping constant β. Beyond critical damping, adding more damping does not make the motion decay more quickly!
25 Driven damped oscillations (why are we allowed to pretend, counterfactually, that the driving force is complex?) Let s guess a solution ẍ + 2βẋ + ω 2 0x = F 0 e iωt x(t) = Ce iωt ( ω 2 + 2iβω + ω 2 0) Ce iωt = F 0 e iωt C = ω 2 + 2iβω + ω0 2 ( ) F 0 x(t) = ω 2 + 2iβω + ω0 2 e iωt This is a particular solution to the inhomogeneous linear diff. eq. But we already know that where Ω = β 2 ω 2 0 F 0 D[x(t)] = F 0 e iωt D[e βt (Ae +Ωt + Be Ωt )] = 0
26 D[Ce iωt ] = F 0 e iωt D[e βt (Ae +Ωt + Be Ωt )] = 0 So then D[e βt (Ae +Ωt + Be Ωt ) + Ce iωt ] = F 0 e iωt General solution to (inhomogeneous) D[x] = f(t) is sum of any particular solution to plus the general solution to D[x] = 0 D[x] = f(t) (inhomogeneous) x(t) = e βt (Ae +Ωt + Be Ωt ) + Ce iωt (homogeneous) Notice that β and ω 0 (and Ω = β 2 ω0 2 ) depend only on the oscillator itself, not on the driving force or the initial conditions. C and ω are properties of the external driving force. A and B depend on initial conditions, but become irrelevant for t 1/β. (The A and B terms are called the transient response.)
27 For driving force F 0 e iωt, we found x(t) = e βt (Ae +Ωt + Be Ωt ) + Ce iωt Once the transients have died away (after Q periods of ω 0 ), with x(t) = Ce iωt F 0 C = ω 2 + 2iβω + ω0 2 If the driving force had been F 0 e iωt, we would have found with x(t) = Ce iωt C = ω 2 2iβω + ω0 2 Linear superposition lets us average these two solutions to get the response to real driving force F 0 cos(ωt). F 0
28 For driving force F 0 cos(ωt) = F 0 2 (e iωt + e iωt ), we get (after transients die out) F 0 /2 x(t) = ω 2 + 2iβω + ω0 2 e iωt F 0 /2 + ω 2 2iβω + ω0 2 e iωt which is the same as ( F 0 x(t) = Re ω 2 + 2iβω + ω0 2 e iωt ) which after some algebra is x(t) = A cos(ωt δ) with A = F 0 (ω 2 0 ω 2 ) 2 + 4β 2 ω 2 ( ) 2βω δ = arctan ω0 2 ω2 [Mathematica and physical demos]
 is that the transient response rings at ω 1 ω 0, which is close to the natural frequency, and decays away at rate β.")
29 For driving force F 0 cos(ωt), we found x(t) = e βt (Ae +Ωt + Be Ωt ) + A cos(ωt δ) with Ω = β 2 ω 2 0 = iω 1 A = F 0 (ω 2 0 ω 2 ) 2 + 4β 2 ω 2 ( ) 2βω δ = arctan ω0 2 ω2 The important point to remember (for the usual underdamped case) is that the transient response rings at ω 1 ω 0, which is close to the natural frequency, and decays away at rate β. But the long-term response is at the driving frequency ω, with an amplitude and phase that depend on ω ω 0.
30
31 Let s go back to the complex-number driving force For driving force F 0 e iωt, we found x(t) = e βt (Ae +Ωt + Be Ωt ) + Ce iωt Once the transients have died away (after Q periods of ω 0 ), x(t) = Ce iωt with F 0 C = ω 2 + 2iβω + ω0 2
32 Now suppose you have a more complicated driving force: ẍ + 2βẋ + ω 2 0x = F a e iωat + F b e iω bt Since D is linear, [ F a e iωat ] D ωa 2 + 2iβω a + ω0 2 = F a e iωat [ F b e iω ] bt D ωb 2 + 2iβω b + ω0 2 = F b e iω bt [ F a e iωat F b e iω ] bt D ωa 2 + 2iβω a + ω0 2 + ωb 2 + 2iβω b + ω0 2 = F a e iωat + F b e iω bt So the general solution is F a e iωat F b e iω bt x(t) = ωa 2 + 2iβω a + ω0 2 + ωb 2 + 2iβω b + ω0 2 + e βt (Ae +Ωt +Be Ωt ) where again the transient terms are irrelevant for t 1/β.
33 Now consider the more general case and suppose we re able to write ẍ + 2βẋ + ω 2 0x = f(t) f(t) = n F n e iωnt Then it s clear that the solution would be x(t) = (transient) + n ω 2 n + 2iβω n + ω 2 0 F n e iωnt If f(t) is periodic (period T 2π/ω), then Prof. Fourier tells us f(t) = + n= F n e inωt
34 f(t) = + n= F n e inωt 1 T +T/2 T/2 f(t) e imωt dt = n F n T So the Fourier coefficient F m is +T/2 T/2 dt e i(n m)ωt = n F n δ mn = F m F m = 1 T +T/2 T/2 f(t)e imωt dt Note: for f(t) real, F m = F m, i.e. the negative-frequency coefficients are the complex conjugates of the corresponding positive-frequency coefficients.
 of period T = 2π/ω, with f(t) = 0 for T/2 < t < 0 f(t) = A for 0 <")
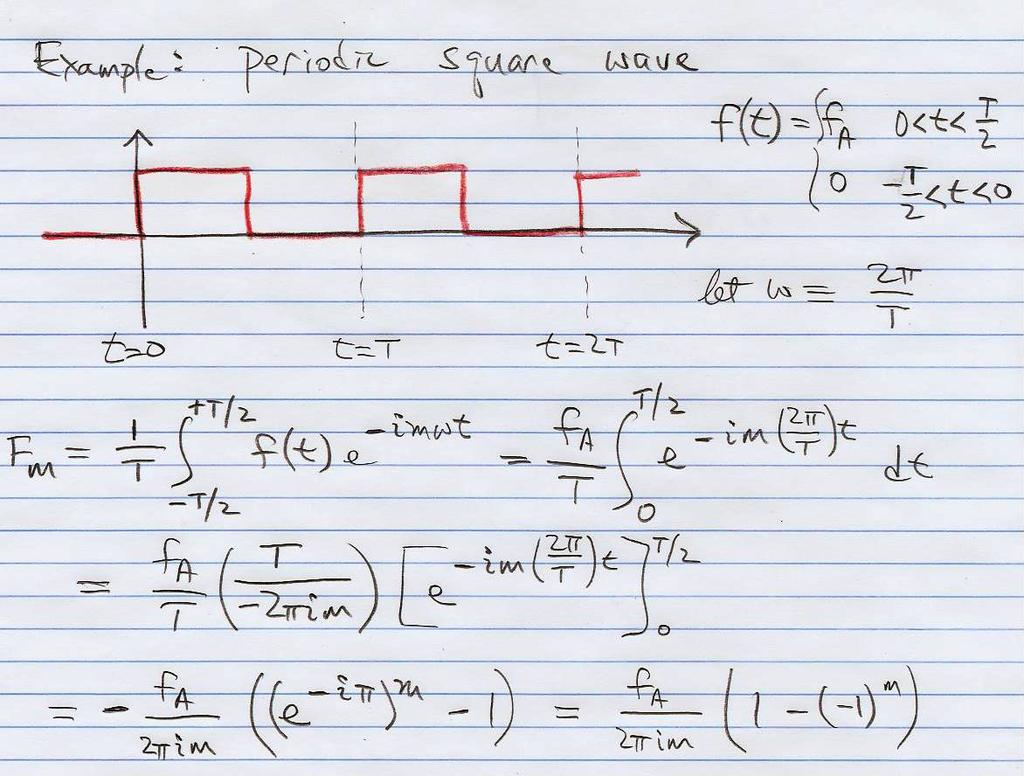
35 f(t) = + n= with Fourier coefficient F n given by F n = 1 T +T/2 T/2 F n e inωt f(t)e inωt dt Exercise: use this complex-number Fourier formalism to find the Fourier series for a square wave f(t) of period T = 2π/ω, with f(t) = 0 for T/2 < t < 0 f(t) = A for 0 < t < T/2
36
37
 of period T = 2π/ω, with f(t) = 2At/T for T/2 < t < 0 f(t) = 2At/T for 0 < t < T/2 hint : te inωt dt = 1 + inωt (nω) 2 e")
38 f(t) = + n= F n e inωt F n = 1 T +T/2 T/2 f(t)e inωt dt Exercise: use this complex-number Fourier formalism to find the Fourier series for a triangle wave f(t) of period T = 2π/ω, with f(t) = 2At/T for T/2 < t < 0 f(t) = 2At/T for 0 < t < T/2 hint : te inωt dt = 1 + inωt (nω) 2 e inωt
39
40
41
42
43
44
45
46
47
48 Notice that the answer came out entirely real, even though we used complex exponentials. Also notice that this looks just like the result from the book using sines and cosines: f x n (t) = A n cos(nωt δ n ) A n = n same δ n (ω 2 0 n 2 ω 2 ) 2 +(2βnω) 2 and 2f A /(πn) is just f n. (sin vs. cos depends on chosen time offset of square wave.)
49 Physics 351 Monday, January 22, 2018 Homework #1 due on Friday 1/26. Homework help sessions start Jan (Wed/Thu). After finishing up Friday s discussion of spherical polar coordinates, we ll spend the rest of this week on Ch 5 6. I m aiming to start Lagrangians by the end of Friday. You ve now read Chapters 1 6. The pace will calm down now, as we start the new material.
1 (2n)! (-1)n (θ) 2n
! (-1)n (θ) 2n") Complex Numbers and Algebra The real numbers are complete for the operations addition, subtraction, multiplication, and division, or more suggestively, for the operations of addition and multiplication
Complex Numbers and Algebra The real numbers are complete for the operations addition, subtraction, multiplication, and division, or more suggestively, for the operations of addition and multiplication
The Harmonic Oscillator
 The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
Classical Mechanics Phys105A, Winter 2007
 Classical Mechanics Phys5A, Winter 7 Wim van Dam Room 59, Harold Frank Hall vandam@cs.ucsb.edu http://www.cs.ucsb.edu/~vandam/ Phys5A, Winter 7, Wim van Dam, UCSB Midterm New homework has been announced
Classical Mechanics Phys5A, Winter 7 Wim van Dam Room 59, Harold Frank Hall vandam@cs.ucsb.edu http://www.cs.ucsb.edu/~vandam/ Phys5A, Winter 7, Wim van Dam, UCSB Midterm New homework has been announced
Damped & forced oscillators
 SEISMOLOGY I Laurea Magistralis in Physics of the Earth and of the Environment Damped & forced oscillators Fabio ROMANELLI Dept. Earth Sciences Università degli studi di Trieste romanel@dst.units.it Damped
SEISMOLOGY I Laurea Magistralis in Physics of the Earth and of the Environment Damped & forced oscillators Fabio ROMANELLI Dept. Earth Sciences Università degli studi di Trieste romanel@dst.units.it Damped
Linear second-order differential equations with constant coefficients and nonzero right-hand side
 Linear second-order differential equations with constant coefficients and nonzero right-hand side We return to the damped, driven simple harmonic oscillator d 2 y dy + 2b dt2 dt + ω2 0y = F sin ωt We note
Linear second-order differential equations with constant coefficients and nonzero right-hand side We return to the damped, driven simple harmonic oscillator d 2 y dy + 2b dt2 dt + ω2 0y = F sin ωt We note
This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 4.0 License.
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 015 14. Oscillations Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License This wor
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 015 14. Oscillations Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License This wor
Problem 1: Lagrangians and Conserved Quantities. Consider the following action for a particle of mass m moving in one dimension
 105A Practice Final Solutions March 13, 01 William Kelly Problem 1: Lagrangians and Conserved Quantities Consider the following action for a particle of mass m moving in one dimension S = dtl = mc dt 1
105A Practice Final Solutions March 13, 01 William Kelly Problem 1: Lagrangians and Conserved Quantities Consider the following action for a particle of mass m moving in one dimension S = dtl = mc dt 1
Wave Phenomena Physics 15c. Lecture 2 Damped Oscillators Driven Oscillators
 Wave Phenomena Physics 15c Lecture Damped Oscillators Driven Oscillators What We Did Last Time Analyzed a simple harmonic oscillator The equation of motion: The general solution: Studied the solution m
Wave Phenomena Physics 15c Lecture Damped Oscillators Driven Oscillators What We Did Last Time Analyzed a simple harmonic oscillator The equation of motion: The general solution: Studied the solution m
Complex Numbers. The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition,
}, with two operations: (i) addition,") Complex Numbers Complex Algebra The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition, and (ii) complex multiplication, (x 1, y 1 )
Complex Numbers Complex Algebra The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition, and (ii) complex multiplication, (x 1, y 1 )
1 Simple Harmonic Oscillator
 Physics 1a Waves Lecture 3 Caltech, 10/09/18 1 Simple Harmonic Oscillator 1.4 General properties of Simple Harmonic Oscillator 1.4.4 Superposition of two independent SHO Suppose we have two SHOs described
Physics 1a Waves Lecture 3 Caltech, 10/09/18 1 Simple Harmonic Oscillator 1.4 General properties of Simple Harmonic Oscillator 1.4.4 Superposition of two independent SHO Suppose we have two SHOs described
Math 3313: Differential Equations Second-order ordinary differential equations
 Math 3313: Differential Equations Second-order ordinary differential equations Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX Outline Mass-spring & Newton s 2nd law Properties
Math 3313: Differential Equations Second-order ordinary differential equations Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX Outline Mass-spring & Newton s 2nd law Properties
Chapter 2: Complex numbers
 Chapter 2: Complex numbers Complex numbers are commonplace in physics and engineering. In particular, complex numbers enable us to simplify equations and/or more easily find solutions to equations. We
Chapter 2: Complex numbers Complex numbers are commonplace in physics and engineering. In particular, complex numbers enable us to simplify equations and/or more easily find solutions to equations. We
Damped Oscillation Solution
 Lecture 19 (Chapter 7): Energy Damping, s 1 OverDamped Oscillation Solution Damped Oscillation Solution The last case has β 2 ω 2 0 > 0. In this case we define another real frequency ω 2 = β 2 ω 2 0. In
Lecture 19 (Chapter 7): Energy Damping, s 1 OverDamped Oscillation Solution Damped Oscillation Solution The last case has β 2 ω 2 0 > 0. In this case we define another real frequency ω 2 = β 2 ω 2 0. In
Math 211. Substitute Lecture. November 20, 2000
 1 Math 211 Substitute Lecture November 20, 2000 2 Solutions to y + py + qy =0. Look for exponential solutions y(t) =e λt. Characteristic equation: λ 2 + pλ + q =0. Characteristic polynomial: λ 2 + pλ +
1 Math 211 Substitute Lecture November 20, 2000 2 Solutions to y + py + qy =0. Look for exponential solutions y(t) =e λt. Characteristic equation: λ 2 + pλ + q =0. Characteristic polynomial: λ 2 + pλ +
L = 1 2 a(q) q2 V (q).
 q2 V (q).") Physics 3550, Fall 2011 Motion near equilibrium - Small Oscillations Relevant Sections in Text: 5.1 5.6 Motion near equilibrium 1 degree of freedom One of the most important situations in physics is motion
Physics 3550, Fall 2011 Motion near equilibrium - Small Oscillations Relevant Sections in Text: 5.1 5.6 Motion near equilibrium 1 degree of freedom One of the most important situations in physics is motion
Computational Physics (6810): Session 8
: Session 8") Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
dx n a 1(x) dy
 dy") HIGHER ORDER DIFFERENTIAL EQUATIONS Theory of linear equations Initial-value and boundary-value problem nth-order initial value problem is Solve: a n (x) dn y dx n + a n 1(x) dn 1 y dx n 1 +... + a 1(x)
HIGHER ORDER DIFFERENTIAL EQUATIONS Theory of linear equations Initial-value and boundary-value problem nth-order initial value problem is Solve: a n (x) dn y dx n + a n 1(x) dn 1 y dx n 1 +... + a 1(x)
One-Dimensional Motion (Symon Chapter Two)
") One-Dimensional Motion (Symon Chapter Two) Physics A3 Fall 3 Copyright 3, John T. Whelan, and all that 1 Contents I Consequences of Newton s Second Law 1 Momentum and Energy 3 Forces Depending only on
One-Dimensional Motion (Symon Chapter Two) Physics A3 Fall 3 Copyright 3, John T. Whelan, and all that 1 Contents I Consequences of Newton s Second Law 1 Momentum and Energy 3 Forces Depending only on
Analytical Mechanics ( AM )
") Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Vibrations and Waves Physics Year 1. Handout 1: Course Details
 Vibrations and Waves Jan-Feb 2011 Handout 1: Course Details Office Hours Vibrations and Waves Physics Year 1 Handout 1: Course Details Dr Carl Paterson (Blackett 621, carl.paterson@imperial.ac.uk Office
Vibrations and Waves Jan-Feb 2011 Handout 1: Course Details Office Hours Vibrations and Waves Physics Year 1 Handout 1: Course Details Dr Carl Paterson (Blackett 621, carl.paterson@imperial.ac.uk Office
One-Dimensional Motion (Symon Chapter Two)
") One-Dimensional Motion (Symon Chapter Two) Physics A3 Fall 4 Contents I Consequences of Newton s Second Law 3 1 Momentum and Energy 3 Forces Depending only on Time (Symon Section.3) 4.1 Example: Sinusoidal
One-Dimensional Motion (Symon Chapter Two) Physics A3 Fall 4 Contents I Consequences of Newton s Second Law 3 1 Momentum and Energy 3 Forces Depending only on Time (Symon Section.3) 4.1 Example: Sinusoidal
Mechanics IV: Oscillations
 Mechanics IV: Oscillations Chapter 4 of Morin covers oscillations, including damped and driven oscillators in detail. Also see chapter 10 of Kleppner and Kolenkow. For more on normal modes, see any book
Mechanics IV: Oscillations Chapter 4 of Morin covers oscillations, including damped and driven oscillators in detail. Also see chapter 10 of Kleppner and Kolenkow. For more on normal modes, see any book
2.3 Damping, phases and all that
 2.3. DAMPING, PHASES AND ALL THAT 107 2.3 Damping, phases and all that If we imagine taking our idealized mass on a spring and dunking it in water or, more dramatically, in molasses), then there will be
2.3. DAMPING, PHASES AND ALL THAT 107 2.3 Damping, phases and all that If we imagine taking our idealized mass on a spring and dunking it in water or, more dramatically, in molasses), then there will be
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
1 Pushing your Friend on a Swing
 Massachusetts Institute of Technology MITES 017 Physics III Lecture 05: Driven Oscillations In these notes, we derive the properties of both an undamped and damped harmonic oscillator under the influence
Massachusetts Institute of Technology MITES 017 Physics III Lecture 05: Driven Oscillations In these notes, we derive the properties of both an undamped and damped harmonic oscillator under the influence
P441 Analytical Mechanics - I. RLC Circuits. c Alex R. Dzierba. In this note we discuss electrical oscillating circuits: undamped, damped and driven.
 Lecture 10 Monday - September 19, 005 Written or last updated: September 19, 005 P441 Analytical Mechanics - I RLC Circuits c Alex R. Dzierba Introduction In this note we discuss electrical oscillating
Lecture 10 Monday - September 19, 005 Written or last updated: September 19, 005 P441 Analytical Mechanics - I RLC Circuits c Alex R. Dzierba Introduction In this note we discuss electrical oscillating
Topic 5 Notes Jeremy Orloff. 5 Homogeneous, linear, constant coefficient differential equations
 Topic 5 Notes Jeremy Orloff 5 Homogeneous, linear, constant coefficient differential equations 5.1 Goals 1. Be able to solve homogeneous constant coefficient linear differential equations using the method
Topic 5 Notes Jeremy Orloff 5 Homogeneous, linear, constant coefficient differential equations 5.1 Goals 1. Be able to solve homogeneous constant coefficient linear differential equations using the method
MAT187H1F Lec0101 Burbulla
 Spring 2017 Second Order Linear Homogeneous Differential Equation DE: A(x) d 2 y dx 2 + B(x)dy dx + C(x)y = 0 This equation is called second order because it includes the second derivative of y; it is
Spring 2017 Second Order Linear Homogeneous Differential Equation DE: A(x) d 2 y dx 2 + B(x)dy dx + C(x)y = 0 This equation is called second order because it includes the second derivative of y; it is
APPPHYS 217 Tuesday 6 April 2010
 APPPHYS 7 Tuesday 6 April Stability and input-output performance: second-order systems Here we present a detailed example to draw connections between today s topics and our prior review of linear algebra
APPPHYS 7 Tuesday 6 April Stability and input-output performance: second-order systems Here we present a detailed example to draw connections between today s topics and our prior review of linear algebra
One-Dimensional Motion (Symon Chapter Two)
") One-Dimensional Motion (Symon Chapter Two) Physics A3 Spring 6 Contents I Consequences of Newton s Second Law 3 1 Momentum and Energy 3 Forces Depending only on Time (Symon Section.3) 4.1 Example: Sinusoidal
One-Dimensional Motion (Symon Chapter Two) Physics A3 Spring 6 Contents I Consequences of Newton s Second Law 3 1 Momentum and Energy 3 Forces Depending only on Time (Symon Section.3) 4.1 Example: Sinusoidal
Differential Equations
 Electricity and Magnetism I (P331) M. R. Shepherd October 14, 2008 Differential Equations The purpose of this note is to provide some supplementary background on differential equations. The problems discussed
Electricity and Magnetism I (P331) M. R. Shepherd October 14, 2008 Differential Equations The purpose of this note is to provide some supplementary background on differential equations. The problems discussed
L = 1 2 a(q) q2 V (q).
 q2 V (q).") Physics 3550 Motion near equilibrium - Small Oscillations Relevant Sections in Text: 5.1 5.6, 11.1 11.3 Motion near equilibrium 1 degree of freedom One of the most important situations in physics is motion
Physics 3550 Motion near equilibrium - Small Oscillations Relevant Sections in Text: 5.1 5.6, 11.1 11.3 Motion near equilibrium 1 degree of freedom One of the most important situations in physics is motion
Vibrations and Waves MP205, Assignment 4 Solutions
 Vibrations and Waves MP205, Assignment Solutions 1. Verify that x = Ae αt cos ωt is a possible solution of the equation and find α and ω in terms of γ and ω 0. [20] dt 2 + γ dx dt + ω2 0x = 0, Given x
Vibrations and Waves MP205, Assignment Solutions 1. Verify that x = Ae αt cos ωt is a possible solution of the equation and find α and ω in terms of γ and ω 0. [20] dt 2 + γ dx dt + ω2 0x = 0, Given x
Damped Harmonic Oscillator
 Damped Harmonic Oscillator Wednesday, 23 October 213 A simple harmonic oscillator subject to linear damping may oscillate with exponential decay, or it may decay biexponentially without oscillating, or
Damped Harmonic Oscillator Wednesday, 23 October 213 A simple harmonic oscillator subject to linear damping may oscillate with exponential decay, or it may decay biexponentially without oscillating, or
Forced Oscillation and Resonance
 Chapter Forced Oscillation and Resonance The forced oscillation problem will be crucial to our understanding of wave phenomena Complex exponentials are even more useful for the discussion of damping and
Chapter Forced Oscillation and Resonance The forced oscillation problem will be crucial to our understanding of wave phenomena Complex exponentials are even more useful for the discussion of damping and
Physics 8 Monday, December 4, 2017
 Physics 8 Monday, December 4, 2017 HW12 due Friday. Grace will do a review session Dec 12 or 13. When? I will do a review session: afternoon Dec 17? Evening Dec 18? Wednesday, I will hand out the practice
Physics 8 Monday, December 4, 2017 HW12 due Friday. Grace will do a review session Dec 12 or 13. When? I will do a review session: afternoon Dec 17? Evening Dec 18? Wednesday, I will hand out the practice
Selected Topics in Physics a lecture course for 1st year students by W.B. von Schlippe Spring Semester 2007
 Selected Topics in Physics a lecture course for st year students by W.B. von Schlippe Spring Semester 7 Lecture : Oscillations simple harmonic oscillations; coupled oscillations; beats; damped oscillations;
Selected Topics in Physics a lecture course for st year students by W.B. von Schlippe Spring Semester 7 Lecture : Oscillations simple harmonic oscillations; coupled oscillations; beats; damped oscillations;
Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017
 Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Lecture 6: Differential Equations Describing Vibrations
 Lecture 6: Differential Equations Describing Vibrations In Chapter 3 of the Benson textbook, we will look at how various types of musical instruments produce sound, focusing on issues like how the construction
Lecture 6: Differential Equations Describing Vibrations In Chapter 3 of the Benson textbook, we will look at how various types of musical instruments produce sound, focusing on issues like how the construction
4. Complex Oscillations
 4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
Table of contents. d 2 y dx 2, As the equation is linear, these quantities can only be involved in the following manner:
 M ath 0 1 E S 1 W inter 0 1 0 Last Updated: January, 01 0 Solving Second Order Linear ODEs Disclaimer: This lecture note tries to provide an alternative approach to the material in Sections 4. 4. 7 and
M ath 0 1 E S 1 W inter 0 1 0 Last Updated: January, 01 0 Solving Second Order Linear ODEs Disclaimer: This lecture note tries to provide an alternative approach to the material in Sections 4. 4. 7 and
Resonance and response
 Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Wave Phenomena Physics 15c
 Wave Phenomena Physics 15c Lecture Harmonic Oscillators (H&L Sections 1.4 1.6, Chapter 3) Administravia! Problem Set #1! Due on Thursday next week! Lab schedule has been set! See Course Web " Laboratory
Wave Phenomena Physics 15c Lecture Harmonic Oscillators (H&L Sections 1.4 1.6, Chapter 3) Administravia! Problem Set #1! Due on Thursday next week! Lab schedule has been set! See Course Web " Laboratory
Damped harmonic motion
 Damped harmonic motion March 3, 016 Harmonic motion is studied in the presence of a damping force proportional to the velocity. The complex method is introduced, and the different cases of under-damping,
Damped harmonic motion March 3, 016 Harmonic motion is studied in the presence of a damping force proportional to the velocity. The complex method is introduced, and the different cases of under-damping,
How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation?
 How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation? (A) 0 (B) 1 (C) 2 (D) more than 2 (E) it depends or don t know How many of
How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation? (A) 0 (B) 1 (C) 2 (D) more than 2 (E) it depends or don t know How many of
Notes on the Periodically Forced Harmonic Oscillator
 Notes on the Periodically orced Harmonic Oscillator Warren Weckesser Math 38 - Differential Equations 1 The Periodically orced Harmonic Oscillator. By periodically forced harmonic oscillator, we mean the
Notes on the Periodically orced Harmonic Oscillator Warren Weckesser Math 38 - Differential Equations 1 The Periodically orced Harmonic Oscillator. By periodically forced harmonic oscillator, we mean the
Physics with Matlab and Mathematica Exercise #1 28 Aug 2012
 Physics with Matlab and Mathematica Exercise #1 28 Aug 2012 You can work this exercise in either matlab or mathematica. Your choice. A simple harmonic oscillator is constructed from a mass m and a spring
Physics with Matlab and Mathematica Exercise #1 28 Aug 2012 You can work this exercise in either matlab or mathematica. Your choice. A simple harmonic oscillator is constructed from a mass m and a spring
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
Section 3.4. Second Order Nonhomogeneous. The corresponding homogeneous equation
 Section 3.4. Second Order Nonhomogeneous Equations y + p(x)y + q(x)y = f(x) (N) The corresponding homogeneous equation y + p(x)y + q(x)y = 0 (H) is called the reduced equation of (N). 1 General Results
Section 3.4. Second Order Nonhomogeneous Equations y + p(x)y + q(x)y = f(x) (N) The corresponding homogeneous equation y + p(x)y + q(x)y = 0 (H) is called the reduced equation of (N). 1 General Results
Springs: Part I Modeling the Action The Mass/Spring System
 17 Springs: Part I Second-order differential equations arise in a number of applications We saw one involving a falling object at the beginning of this text (the falling frozen duck example in section
17 Springs: Part I Second-order differential equations arise in a number of applications We saw one involving a falling object at the beginning of this text (the falling frozen duck example in section
Contents. Contents. Contents
 Physics 121 for Majors Class 18 Linear Harmonic Last Class We saw how motion in a circle is mathematically similar to motion in a straight line. We learned that there is a centripetal acceleration (and
Physics 121 for Majors Class 18 Linear Harmonic Last Class We saw how motion in a circle is mathematically similar to motion in a straight line. We learned that there is a centripetal acceleration (and
Atomic cross sections
 Chapter 12 Atomic cross sections The probability that an absorber (atom of a given species in a given excitation state and ionziation level) will interact with an incident photon of wavelength λ is quantified
Chapter 12 Atomic cross sections The probability that an absorber (atom of a given species in a given excitation state and ionziation level) will interact with an incident photon of wavelength λ is quantified
Source-Free RC Circuit
 First Order Circuits Source-Free RC Circuit Initial charge on capacitor q = Cv(0) so that voltage at time 0 is v(0). What is v(t)? Prof Carruthers (ECE @ BU) EK307 Notes Summer 2018 150 / 264 First Order
First Order Circuits Source-Free RC Circuit Initial charge on capacitor q = Cv(0) so that voltage at time 0 is v(0). What is v(t)? Prof Carruthers (ECE @ BU) EK307 Notes Summer 2018 150 / 264 First Order
Solutions for homework 5
 1 Section 4.3 Solutions for homework 5 17. The following equation has repeated, real, characteristic roots. Find the general solution. y 4y + 4y = 0. The characteristic equation is λ 4λ + 4 = 0 which has
1 Section 4.3 Solutions for homework 5 17. The following equation has repeated, real, characteristic roots. Find the general solution. y 4y + 4y = 0. The characteristic equation is λ 4λ + 4 = 0 which has
Wave Phenomena Physics 15c
 Wave Phenomena Physics 15c Lecture Harmonic Oscillators (H&L Sections 1.4 1.6, Chapter 3) Administravia! Problem Set #1! Due on Thursday next week! Lab schedule has been set! See Course Web " Laboratory
Wave Phenomena Physics 15c Lecture Harmonic Oscillators (H&L Sections 1.4 1.6, Chapter 3) Administravia! Problem Set #1! Due on Thursday next week! Lab schedule has been set! See Course Web " Laboratory
Vibrations: Second Order Systems with One Degree of Freedom, Free Response
 Single Degree of Freedom System 1.003J/1.053J Dynamics and Control I, Spring 007 Professor Thomas Peacock 5//007 Lecture 0 Vibrations: Second Order Systems with One Degree of Freedom, Free Response Single
Single Degree of Freedom System 1.003J/1.053J Dynamics and Control I, Spring 007 Professor Thomas Peacock 5//007 Lecture 0 Vibrations: Second Order Systems with One Degree of Freedom, Free Response Single
kg meter ii) Note the dimensions of ρ τ are kg 2 velocity 2 meter = 1 sec 2 We will interpret this velocity in upcoming slides.
 Note the dimensions of ρ τ are kg 2 velocity 2 meter = 1 sec 2 We will interpret this velocity in upcoming slides.") II. Generalizing the 1-dimensional wave equation First generalize the notation. i) "q" has meant transverse deflection of the string. Replace q Ψ, where Ψ may indicate other properties of the medium that
II. Generalizing the 1-dimensional wave equation First generalize the notation. i) "q" has meant transverse deflection of the string. Replace q Ψ, where Ψ may indicate other properties of the medium that
Chapter 1. Harmonic Oscillator. 1.1 Energy Analysis
 Chapter 1 Harmonic Oscillator Figure 1.1 illustrates the prototypical harmonic oscillator, the mass-spring system. A mass is attached to one end of a spring. The other end of the spring is attached to
Chapter 1 Harmonic Oscillator Figure 1.1 illustrates the prototypical harmonic oscillator, the mass-spring system. A mass is attached to one end of a spring. The other end of the spring is attached to
Sinusoids. Amplitude and Magnitude. Phase and Period. CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
Thursday, August 4, 2011
 Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
01 Harmonic Oscillations
 Utah State University DigitalCommons@USU Foundations of Wave Phenomena Library Digital Monographs 8-2014 01 Harmonic Oscillations Charles G. Torre Department of Physics, Utah State University, Charles.Torre@usu.edu
Utah State University DigitalCommons@USU Foundations of Wave Phenomena Library Digital Monographs 8-2014 01 Harmonic Oscillations Charles G. Torre Department of Physics, Utah State University, Charles.Torre@usu.edu
Simple Harmonic Motion
 Simple Harmonic Motion (FIZ 101E - Summer 2018) July 29, 2018 Contents 1 Introduction 2 2 The Spring-Mass System 2 3 The Energy in SHM 5 4 The Simple Pendulum 6 5 The Physical Pendulum 8 6 The Damped Oscillations
Simple Harmonic Motion (FIZ 101E - Summer 2018) July 29, 2018 Contents 1 Introduction 2 2 The Spring-Mass System 2 3 The Energy in SHM 5 4 The Simple Pendulum 6 5 The Physical Pendulum 8 6 The Damped Oscillations
Physics III: Final Solutions (Individual and Group)
") Massachusetts Institute of Technology MITES 7 Physics III First and Last Name: Physics III: Final Solutions (Individual and Group Instructor: Mobolaji Williams Teaching Assistant: Rene García (Tuesday
Massachusetts Institute of Technology MITES 7 Physics III First and Last Name: Physics III: Final Solutions (Individual and Group Instructor: Mobolaji Williams Teaching Assistant: Rene García (Tuesday
AC analysis. EE 201 AC analysis 1
 AC analysis Now we turn to circuits with sinusoidal sources. Earlier, we had a brief look at sinusoids, but now we will add in capacitors and inductors, making the story much more interesting. What are
AC analysis Now we turn to circuits with sinusoidal sources. Earlier, we had a brief look at sinusoids, but now we will add in capacitors and inductors, making the story much more interesting. What are
Lab 1: Damped, Driven Harmonic Oscillator
 1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Section 3.4. Second Order Nonhomogeneous. The corresponding homogeneous equation. is called the reduced equation of (N).
.") Section 3.4. Second Order Nonhomogeneous Equations y + p(x)y + q(x)y = f(x) (N) The corresponding homogeneous equation y + p(x)y + q(x)y = 0 (H) is called the reduced equation of (N). 1 General Results
Section 3.4. Second Order Nonhomogeneous Equations y + p(x)y + q(x)y = f(x) (N) The corresponding homogeneous equation y + p(x)y + q(x)y = 0 (H) is called the reduced equation of (N). 1 General Results
z = x + iy ; x, y R rectangular or Cartesian form z = re iθ ; r, θ R polar form. (1)
") 11 Complex numbers Read: Boas Ch. Represent an arb. complex number z C in one of two ways: z = x + iy ; x, y R rectangular or Cartesian form z = re iθ ; r, θ R polar form. (1) Here i is 1, engineers call
11 Complex numbers Read: Boas Ch. Represent an arb. complex number z C in one of two ways: z = x + iy ; x, y R rectangular or Cartesian form z = re iθ ; r, θ R polar form. (1) Here i is 1, engineers call
Lab 1: damped, driven harmonic oscillator
 Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Solutions 2: Simple Harmonic Oscillator and General Oscillations
 Massachusetts Institute of Technology MITES 2017 Physics III Solutions 2: Simple Harmonic Oscillator and General Oscillations Due Wednesday June 21, at 9AM under Rene García s door Preface: This problem
Massachusetts Institute of Technology MITES 2017 Physics III Solutions 2: Simple Harmonic Oscillator and General Oscillations Due Wednesday June 21, at 9AM under Rene García s door Preface: This problem
Lecture 7. Please note. Additional tutorial. Please note that there is no lecture on Tuesday, 15 November 2011.
 Lecture 7 3 Ordinary differential equations (ODEs) (continued) 6 Linear equations of second order 7 Systems of differential equations Please note Please note that there is no lecture on Tuesday, 15 November
Lecture 7 3 Ordinary differential equations (ODEs) (continued) 6 Linear equations of second order 7 Systems of differential equations Please note Please note that there is no lecture on Tuesday, 15 November
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod)
") 28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
Physics 141, Lecture 7. Outline. Course Information. Course information: Homework set # 3 Exam # 1. Quiz. Continuation of the discussion of Chapter 4.
 Physics 141, Lecture 7. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 07, Page 1 Outline. Course information: Homework set # 3 Exam # 1 Quiz. Continuation of the
Physics 141, Lecture 7. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 07, Page 1 Outline. Course information: Homework set # 3 Exam # 1 Quiz. Continuation of the
Mathematical Physics
 Mathematical Physics MP205 Vibrations and Waves Lecturer: Office: Lecture 9-10 Dr. Jiří Vala Room 1.9, Mathema
Mathematical Physics MP205 Vibrations and Waves Lecturer: Office: Lecture 9-10 Dr. Jiří Vala Room 1.9, Mathema
Oscillatory Motion SHM
 Chapter 15 Oscillatory Motion SHM Dr. Armen Kocharian Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A
Chapter 15 Oscillatory Motion SHM Dr. Armen Kocharian Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A
MA 266 Review Topics - Exam # 2 (updated)
") MA 66 Reiew Topics - Exam # updated Spring First Order Differential Equations Separable, st Order Linear, Homogeneous, Exact Second Order Linear Homogeneous with Equations Constant Coefficients The differential
MA 66 Reiew Topics - Exam # updated Spring First Order Differential Equations Separable, st Order Linear, Homogeneous, Exact Second Order Linear Homogeneous with Equations Constant Coefficients The differential
3.4.1 Distinct Real Roots
 Math 334 3.4. CONSTANT COEFFICIENT EQUATIONS 34 Assume that P(x) = p (const.) and Q(x) = q (const.), so that we have y + py + qy = 0, or L[y] = 0 (where L := d2 dx 2 + p d + q). (3.7) dx Guess a solution
Math 334 3.4. CONSTANT COEFFICIENT EQUATIONS 34 Assume that P(x) = p (const.) and Q(x) = q (const.), so that we have y + py + qy = 0, or L[y] = 0 (where L := d2 dx 2 + p d + q). (3.7) dx Guess a solution
University Physics 226N/231N Old Dominion University. Chapter 14: Oscillatory Motion
 University Physics 226N/231N Old Dominion University Chapter 14: Oscillatory Motion Dr. Todd Satogata (ODU/Jefferson Lab) satogata@jlab.org http://www.toddsatogata.net/2016-odu Monday, November 5, 2016
University Physics 226N/231N Old Dominion University Chapter 14: Oscillatory Motion Dr. Todd Satogata (ODU/Jefferson Lab) satogata@jlab.org http://www.toddsatogata.net/2016-odu Monday, November 5, 2016
ODEs. September 7, Consider the following system of two coupled first-order ordinary differential equations (ODEs): A =
: A =") ODEs September 7, 2017 In [1]: using Interact, PyPlot 1 Exponential growth and decay Consider the following system of two coupled first-order ordinary differential equations (ODEs): d x/dt = A x for the
ODEs September 7, 2017 In [1]: using Interact, PyPlot 1 Exponential growth and decay Consider the following system of two coupled first-order ordinary differential equations (ODEs): d x/dt = A x for the
4.9 Free Mechanical Vibrations
 4.9 Free Mechanical Vibrations Spring-Mass Oscillator When the spring is not stretched and the mass m is at rest, the system is at equilibrium. Forces Acting in the System When the mass m is displaced
4.9 Free Mechanical Vibrations Spring-Mass Oscillator When the spring is not stretched and the mass m is at rest, the system is at equilibrium. Forces Acting in the System When the mass m is displaced
Differential Equations
 Differential Equations A differential equation (DE) is an equation which involves an unknown function f (x) as well as some of its derivatives. To solve a differential equation means to find the unknown
Differential Equations A differential equation (DE) is an equation which involves an unknown function f (x) as well as some of its derivatives. To solve a differential equation means to find the unknown
Fourier transforms. c n e inπx. f (x) = Write same thing in an equivalent form, using n = 1, f (x) = l π
 = Write same thing in an equivalent form, using n = 1, f (x) = l π") Fourier transforms We can imagine our periodic function having periodicity taken to the limits ± In this case, the function f (x) is not necessarily periodic, but we can still use Fourier transforms (related
Fourier transforms We can imagine our periodic function having periodicity taken to the limits ± In this case, the function f (x) is not necessarily periodic, but we can still use Fourier transforms (related
Symmetries 2 - Rotations in Space
 Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
Chapter 13 Lecture. Essential University Physics Richard Wolfson 2 nd Edition. Oscillatory Motion Pearson Education, Inc.
 Chapter 13 Lecture Essential University Physics Richard Wolfson nd Edition Oscillatory Motion Slide 13-1 In this lecture you ll learn To describe the conditions under which oscillatory motion occurs To
Chapter 13 Lecture Essential University Physics Richard Wolfson nd Edition Oscillatory Motion Slide 13-1 In this lecture you ll learn To describe the conditions under which oscillatory motion occurs To
Vibrations and waves: revision. Martin Dove Queen Mary University of London
 Vibrations and waves: revision Martin Dove Queen Mary University of London Form of the examination Part A = 50%, 10 short questions, no options Part B = 50%, Answer questions from a choice of 4 Total exam
Vibrations and waves: revision Martin Dove Queen Mary University of London Form of the examination Part A = 50%, 10 short questions, no options Part B = 50%, Answer questions from a choice of 4 Total exam
Math53: Ordinary Differential Equations Autumn 2004
 Math53: Ordinary Differential Equations Autumn 2004 Unit 2 Summary Second- and Higher-Order Ordinary Differential Equations Extremely Important: Euler s formula Very Important: finding solutions to linear
Math53: Ordinary Differential Equations Autumn 2004 Unit 2 Summary Second- and Higher-Order Ordinary Differential Equations Extremely Important: Euler s formula Very Important: finding solutions to linear
PHYSICS 110A : CLASSICAL MECHANICS HW 2 SOLUTIONS. Here is a sketch of the potential with A = 1, R = 1, and S = 1. From the plot we can see
 PHYSICS 11A : CLASSICAL MECHANICS HW SOLUTIONS (1) Taylor 5. Here is a sketch of the potential with A = 1, R = 1, and S = 1. From the plot we can see 1.5 1 U(r).5.5 1 4 6 8 1 r Figure 1: Plot for problem
PHYSICS 11A : CLASSICAL MECHANICS HW SOLUTIONS (1) Taylor 5. Here is a sketch of the potential with A = 1, R = 1, and S = 1. From the plot we can see 1.5 1 U(r).5.5 1 4 6 8 1 r Figure 1: Plot for problem
PHY 3221 Fall Homework Problems. Instructor: Yoonseok Lee. Submit only HW s. EX s are additional problems that I encourage you to work on.
 PHY 3221 Fall 2012 Homework Problems Instructor: Yoonseok Lee Submit only HW s. EX s are additional problems that I encourage you to work on. Week 1: August 22-24, Due August 27 (nothing to submit) EX:
PHY 3221 Fall 2012 Homework Problems Instructor: Yoonseok Lee Submit only HW s. EX s are additional problems that I encourage you to work on. Week 1: August 22-24, Due August 27 (nothing to submit) EX:
10. Operators and the Exponential Response Formula
 52 10. Operators and the Exponential Response Formula 10.1. Operators. Operators are to functions as functions are to numbers. An operator takes a function, does something to it, and returns this modified
52 10. Operators and the Exponential Response Formula 10.1. Operators. Operators are to functions as functions are to numbers. An operator takes a function, does something to it, and returns this modified
A.1 Introduction & Rant
 Scott Hughes 1 March 004 A.1 Introduction & Rant Massachusetts Institute of Technology Department of Physics 8.0 Spring 004 Supplementary notes: Complex numbers Complex numbers are numbers that consist
Scott Hughes 1 March 004 A.1 Introduction & Rant Massachusetts Institute of Technology Department of Physics 8.0 Spring 004 Supplementary notes: Complex numbers Complex numbers are numbers that consist
18.03SC Practice Problems 14
 1.03SC Practice Problems 1 Frequency response Solution suggestions In this problem session we will work with a second order mass-spring-dashpot system driven by a force F ext acting directly on the mass:
1.03SC Practice Problems 1 Frequency response Solution suggestions In this problem session we will work with a second order mass-spring-dashpot system driven by a force F ext acting directly on the mass:
11/17/10. Chapter 14. Oscillations. Chapter 14. Oscillations Topics: Simple Harmonic Motion. Simple Harmonic Motion
 11/17/10 Chapter 14. Oscillations This striking computergenerated image demonstrates an important type of motion: oscillatory motion. Examples of oscillatory motion include a car bouncing up and down,
11/17/10 Chapter 14. Oscillations This striking computergenerated image demonstrates an important type of motion: oscillatory motion. Examples of oscillatory motion include a car bouncing up and down,
Lecture 1: Simple Harmonic Oscillators
 Matthew Schwartz Lecture 1: Simple Harmonic Oscillators 1 Introduction The simplest thing that can happen in the physical universe is nothing. The next simplest thing, which doesn t get too far away from
Matthew Schwartz Lecture 1: Simple Harmonic Oscillators 1 Introduction The simplest thing that can happen in the physical universe is nothing. The next simplest thing, which doesn t get too far away from
Fourier series. Complex Fourier series. Positive and negative frequencies. Fourier series demonstration. Notes. Notes. Notes.
 Fourier series Fourier series of a periodic function f (t) with period T and corresponding angular frequency ω /T : f (t) a 0 + (a n cos(nωt) + b n sin(nωt)), n1 Fourier series is a linear sum of cosine
Fourier series Fourier series of a periodic function f (t) with period T and corresponding angular frequency ω /T : f (t) a 0 + (a n cos(nωt) + b n sin(nωt)), n1 Fourier series is a linear sum of cosine
Introductory Physics. Week 2015/05/29
 2015/05/29 Part I Summary of week 6 Summary of week 6 We studied the motion of a projectile under uniform gravity, and constrained rectilinear motion, introducing the concept of constraint force. Then
2015/05/29 Part I Summary of week 6 Summary of week 6 We studied the motion of a projectile under uniform gravity, and constrained rectilinear motion, introducing the concept of constraint force. Then
Chapter 14 Periodic Motion
 Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
Physics 351, Spring 2015, Homework #3. Due at start of class, Friday, February 6, 2015
 Physics 351, Spring 2015, Homework #3. Due at start of class, Friday, February 6, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2015, Homework #3. Due at start of class, Friday, February 6, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
F = ma, F R + F S = mx.
 Mechanical Vibrations As we mentioned in Section 3.1, linear equations with constant coefficients come up in many applications; in this section, we will specifically study spring and shock absorber systems
Mechanical Vibrations As we mentioned in Section 3.1, linear equations with constant coefficients come up in many applications; in this section, we will specifically study spring and shock absorber systems
Oscillations. Tacoma Narrow Bridge: Example of Torsional Oscillation
 Oscillations Mechanical Mass-spring system nd order differential eq. Energy tossing between mass (kinetic energy) and spring (potential energy) Effect of friction, critical damping (shock absorber) Simple
Oscillations Mechanical Mass-spring system nd order differential eq. Energy tossing between mass (kinetic energy) and spring (potential energy) Effect of friction, critical damping (shock absorber) Simple
Complex Numbers Review
 Complex Numbers view ference: Mary L. Boas, Mathematical Methods in the Physical Sciences Chapter 2 & 14 George Arfken, Mathematical Methods for Physicists Chapter 6 The real numbers (denoted R) are incomplete
Complex Numbers view ference: Mary L. Boas, Mathematical Methods in the Physical Sciences Chapter 2 & 14 George Arfken, Mathematical Methods for Physicists Chapter 6 The real numbers (denoted R) are incomplete
Damped Harmonic Oscillator
 Damped Harmonic Oscillator Note: We use Newton s 2 nd Law instead of Conservation of Energy since we will have energy transferred into heat. F spring = -kx; F resistance = -bv. Note also: We use F ar =
Damped Harmonic Oscillator Note: We use Newton s 2 nd Law instead of Conservation of Energy since we will have energy transferred into heat. F spring = -kx; F resistance = -bv. Note also: We use F ar =