arxiv: v1 [math.dg] 28 Jun 2008
|
|
|
- George Jones
- 5 years ago
- Views:
Transcription
1 Limit Surfaces of Riemann Examples David Hoffman, Wayne Rossman arxiv: v [math.dg] 28 Jun 2008 Introduction The only connected minimal surfaces foliated by circles and lines are domains on one of the following surfaces: the helicoid, the catenoid, the plane, and the examples of Riemann ([Ri] p329-33, [En] p403-6, [Ni] p85-6). All these surfaces are complete and embedded. Topologically they are planar domains: the helicoid is simply-connected, the catenoid is an annulus (conformally a twice-punctured sphere), and each Riemann example (see Figure ) is conformal to the plane minus the points {(n,0), ( n,0) n Z} [HKR]. In this section we will show that the plane, helicoid, and catenoid arise naturally as limits of well-chosen and properly normalized sequences of Riemann examples. The local behavior of domains on Riemann examples accounts for the existence of these limits, thus allowing a change of topology in the limit surfaces. Theorem. Any sequence of Riemann examples that converges to a surface in R 3 converges either to a Riemann example, a helicoid, a catenoid, an infinite set of equally spaced parallel planes, or a single plane. Furthermore, there exist sequences of Riemann examples that converge to each of these possibilities. In order to be precise, we state what we mean by convergence of surfaces in R 3 in this context. Definition. A sequence of surfaces {S i } i= converges as i to a surface S in R3 if, for any compact region B R 3, there exists an integer N B such that for i > N B, S i B is a normal graph over S, and {S i B} i=n B converges to S in the C -topology. One can define analogously the convergence of a one-parameter family S t,t R, as t t 0. Since this convergence is in the C -topology, it requires that derivatives of all orders of the coordinate functions on the graphs converge to the corresponding derivatives of the coordinate functions on the limit-surface. We observe that catenoids, helicoids, and planes are limit-surfaces of sequences of Riemann examples. Therefore the collection of connected embedded minimal surfaces foliated by circles and lines is itself connected in the topology associated with this convergence. We wish to thank Rob Kusner, Pascal Romon, Ed Thayer, Johannes Nitsche and Harold Rosenberg for helpful conversations.

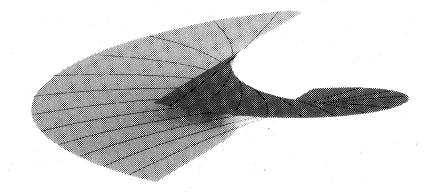
2 Figure : The Riemann Example R, = 2 The Family of Riemann Examples 2. Definition of the Riemann Examples We now describe properties of the Riemann examples, and we give a Weierstrass representation for these surfaces. Proofs of the statements in this section may be found in [HKR]. For any Riemann example R, there exists a translation T of R 3 so that T: leaves R invariant; is orientation-preserving on R; generates the full cyclic orientation-preserving translation symmetry group of R. The quotient-surface R/T is a twice-punctured rectangular torus. Thus, Riemann examples can be parametrized via a Weierstrass representation on such a torus. Fix > 0. We first define M : M = { (z,w) (C { }) 2 : w 2 = z(z )(z + ) }. (2.) Let M be the twice-punctured torus M = M \ {(0,0), (, )}. (2.2) With the Weierstrass data g(z,w) = z, η(z,w) = dz zw, (2.3) the Weierstrass representation for the Riemann examples R is R (p) := Re Φ (g,η) dz, p 0 Φ (g,η) := ( )dz zw i(+ )dz zw 2dz w The family R of Riemann examples is parametrized by (0, )., p M. (2.4) 2
3 The surface M can be considered to be a double covering of the punctured z-plane, branched at and. Consider a circle α in the z-plane with center 2 and radius 2 (+ ), and lift α to a closed curve ˆα in M. The Weierstrass integral about ˆα results in a nonzero period-vector, and this is the translation T. Letting ź = z and ẃ = iw, we have ẃ 2 = ź(ź )(ź + ). Thus we may consider the map (z,w) (ź,ẃ) to be a conformal diffeomorphism between M and M. Because the metric on R ([Os] p65, [HKR]) is ds 2 = ( + z 2 ) 2 4 z 2 w 2 dz 2, the maps (z,w) ( z, w) and (z,w) ( z, w) both restrict to isometries of M in the induced metric. The set A = {(t,w) M t R}, which consists of the union of their fixed-point sets, is mapped by the Weierstrass integral to geodesics in R. It is clear from the Weierstrass integral that the intervals in A of the form t lines in R, while intervals in A of the form in R. Planar geodesics must be principal curves. The surfaces R have the following additional properties: or 0 < t represent t < 0 or t represent planar geodesics ) R is foliated by circles and lines in horizontal planes. All the lines in R are the image under the Weierstrass representation of points in A such that t or 0 < t, which is the fixed-point set of the map (z,w(z)) ( z, w(z)). 2) R has an infinite number of equally spaced horizontal flat ends. These ends correspond to the punctures of M at z = 0,. 3) R is invariant under reflection in a plane parallel to the (x,x 3 )-plane. The intersection of this plane with R consists of the image under the Weierstrass representation of points in A such that z < 0 or z, which is the fixed-point set of the map (z,w(z)) ( z, w(z)). 4) R is invariant under rotation about horizontal lines that are perpendicular to the (x,x 3 )-plane, and meet the surface orthogonally at the points where g(z) = ±i. The map (z,w) ( z, w ) restricted to M represents this rotation. We will consider a Riemann example to be any surface that is the image of one of these surfaces R under an isometry or homothety of R 3. 3
4 2.2 Conjugate Pairs of Riemann Examples Proposition 2. For any positive, the Riemann examples R and R but not congruent. R is self-conjugate. Proof. Choose >. The conjugate surface of R has Weierstrass data g = z, iη = idz zw = dz ( z)(iw). are conjugate The Weierstrass data for the conjugate surface, expressed in terms of (ź,ẃ) = ( z,iw) on M, is Because Φ ( g, η) = g(ź,ẃ) = ź, η(ź,ẃ) = dź źẃ Φ (g,η), it follows from equation (2.4) that the minimal surface in R 3 with this Weierstrass data is the image of R conjugate surfaces. under a rotation by π about a vertical axis. Hence R and R We use the Weierstrass data to show that R and R cannot be congruent for. Consider the points on R where g = ±. As shown in the previous Section 2. (Property ), when >, these points lie on the lines in R. By contrast, the points of R where g(z) = ± lie on the planar geodesics in the vertical plane of reflective symmetry of the surface. Suppose there exists a symmetry of R 3 taking R to R, then this symmetry must take lines to lines, ends to ends, and planar geodesics to planar geodesics. Since the lines in these two surfaces are all parallel to the x 2 -axis and the ends are horizontal, the symmetry of R 3 must be of the form ± ± ± Therefore points of R where g = ± must be mapped to points of R where g = ±. This implies that the points of R and R where g = ± are the points where the lines and planar geodesics in the surface intersect i.e. where g = ± ±. But we are assuming. Thus R and R are not congruent. Remark. One checks that the mapping (z,w) (z,w ) from M to M has the property that on fundamental cycles it preserves the periods (one of which is always zero) of (2.4). Hence this mapping induces an isometry of R and R.. are 4
5 Upon considering the behavior of R and R as 0, one finds that R and R do not have limits that are regular surfaces. However, if these surfaces are normalized appropriately they converge to a catenoid and its conjugate surface, the helicoid, which is consistent with Proposition 2.. We shall prove this in the next section. 3 Proof of the Main Result To find a sequence of Riemann examples that converges to a catenoid or helicoid, we renormalize the surfaces R as follows. Begin the integration in the Weierstrass representation at the point z 0 =. If >, rescale by ; if <, rescale by. We name these normalized Riemann examples Ŕ. Note that the rescaling is accomplished by multiplying η in the Weierstrass representation by and, respectively. Thus, the Weierstrass representation for Ŕ is g = z, η = g = z, η = dz zw,, dz,. zw One can check as in Proposition 2. that Ŕ and Ŕ Let K denote Gauss curvature. are conjugate. Lemma 3. There exists a universal bound c such that K c on Ŕ for all (0, ). Proof. With Weierstrass data given locally as g and η = fdz, the Gauss curvature of a minimal surface is ([Os], p76) 4 g K = ( f ( + g 2 ) 2)2. (3.5) In the case of Ŕ a computation using equations (2.) and (3.5) yields K = 6 α z z + z ( z + z ) 4. where α = if, and α = if. If, then Similarly, if, then K 6 ( z + )( z + ) ( z + ) 2 z ( z + z ) 4 6 z ( z + z ) 4 4. K 6 ( z + )( z + ) ( z + ) 2 z ( z + z ) 4 6 z ( z + z ) 4 4. Thus, K has a universal upper bound. 5
6 Remark. More calculation shows that K on R is maximized at a fixed point of one of the symmetries of the surface. Thus K is maximized in one of the following three places: somewhere along a straight line in R ; somewhere along a planar geodesic in the plane of reflective symmetry parallel to {x 2 = 0}; or at the points where g(z) = ±i, which are the fixed points of the normal rotation. At the points where z = g(z) = ±i, the value of K on R is +. Hence on Ŕ the value is + (resp. + 2 ) when > (resp. when < ). 2 The following conjecture has been verified numerically: The absolute value of the Gaussian curvature on R is maximized at the points where z = g(z) = ±i. This implies that the optimal value in Lemma 3. is c = 2. Proposition 3. There exist sequences of Riemann examples that converge to a helicoid and sequences that converge to a catenoid. Proof. We will prove this proposition by showing that the limit, as 0, of Ŕ is a catenoid, and the limit, as, of Ŕ is a helicoid (see Figures 2 through 4). We consider first the case 0. For a large positive number L, let A L be the annular ring {z C : L < z < L}. One can think of z in (2.) as a map from M to C \ {0}. Then for sufficiently small, z (A L ) consists of two disjoint sets in M. Choose either one and name it ÁL,. Since z parametrizes ÁL,, we shall refer to points in ÁL, by their z coordinates. Let B r be a ball centered at the origin in R 3 with radius r. Let S r be the horizontal slab {(x,x 2,x 3 ) R 3 r x 3 r}, with boundary planes x 3 = ±r. Let C be the catenoid obtained by using the Weierstrass data g(z) = z, η(z) = dz, and integrating over C \ {0} with base point z 0 =. The Weierstrass representation for the catenoid C is C(p) := Re ( )dz i(+ )dz 2dz z, p C \ {0}. Let ĈL be the image of the restriction of C(p) to A L. By examination of the third coordinate of the Weierstrass representation, we see that ĈL = C S 2lnL. Choose a large value for r, and choose L > e r so that C S 2r ĈL. For <, the Weierstrass representation for Ŕ is Ŕ (p) := Re ( )dz zw i(+ )dz zw 2dz w = C(p) + Re f 0, (z) ( z2 )dz f 0, (z) i(+z2 )dz f 0, (z) 2dz z, (3.6) 6





7 Figure 2: Portion of the Riemann Example Ŕ, = 0. Figure 3: Portion of the Riemann Example Ŕ, = 0.5 Figure 4: Portion of the Riemann Example Ŕ, =.0 Figure 5: Portion of the Riemann Example Ŕ, = 3.0 Figure 6: Portion of the Riemann Example Ŕ, = 5.0 Figure 7: Portion of the Riemann Example Ŕ, = 0.0 7
8 where f 0, (z) = z (z )(z + ). If is close to zero, then the Weierstrass integral Ŕ along any closed curve in ÁL, is zero. Therefore the Weierstrass integral depends only on the endpoints of a path in ÁL,. All paths from z 0 = to p A L may be chosen to be of length less than cl, where c is some fixed constant. Note that the functions, are bounded on A L. Also, for all z A L, +, 2 z lim f 0,(z) = 0. 0 It follows that the last integral in equation (3.6) becomes arbitrarily small, uniformly on Á L,, as 0. In particular, for all p A L, lim 0 Ŕ (p) = C(p). Let ˆR be the image of Á L, under the map Ŕ(p). It follows that ˆR is a small perturbation of ĈL for close to zero. We conclude that Ŕ B r ˆR. Thus to examine the behavior of Ŕ, as 0, in arbitrary compact regions of R 3, it is enough to examine ˆR in B r for arbitrarily large fixed r. We claim that the surface Ŕ B r is a graph over a subset of the catenoid C, for close to 0. By Lemma 3., the Gaussian curvature K is uniformly bounded for all Ŕ. This implies that the normal curvatures are also uniformly founded. This in turn implies Ŕ B r is a union of graphs over a subset of the catenoid C. Since the surface Ŕ is foliated by lines and circles in horizontal planes, there is a single graph. We now show that Ŕ B r converges to C B r, in the C -topology, as 0. Because the curvature of Ŕ is bounded uniformly in, it follows from standard elliptic theory that the convergence is C. (Curvature bounds give C estimates.) However, we can give in our specific case a direct proof. Let p C B r. Let z p A L be the point such that C(z p ) = p, and let B h (z p ) A L be a ball of radius h about z p. Note that Ŕ(B h (z p )) consists of disks in R 3 converging in the C 0 -norm, as 0, to a disk containing p and lying on the catenoid C. Let x i, (z) be the i th coordinate function of Ŕ, let x i (z) be the i th coordinate function on C, and let f (z) = x i, (z) x i (z). Note that max f (w) 0, as 0. w B h (z p) Since f (z) is harmonic, it is the real part of a holomorphic function F (z), and F (z) can be chosen so that max F (w) 0, as 0. w B h (z p) 8
9 Assuming z B h(z p ), and using the Cauchy integral formula, we have 2 f (k) (z) F (k) (z) k! F(ξ) = 2πi B h (z p) (ξ z) k+dξ k! ( ) 2 k+ 2πh max 2π h F (w), w B h (z p) and so we have that f (k) (z) 0 k, z B h (z p ), as 0. Therefore f (k) (z) 2 0 k, z A L, and the convergence is in the C -topology in B r. Since r is arbitrary, we have completed the proof that Ŕ converges to the catenoid C as 0. It is now intuitively clear that the surfaces Ŕ converge to a helicoid for the following reason: as, their conjugate surfaces Ŕ converge to a catenoid. One can give an explicit proof of this, similar to the proof just given for the case 0. However, there are some differences in the proof of the case. For close to, the representation for Ŕ is where Re Ŕ (p) := Re i( )dz (+ )dz 2idz z + Re f, (z) = ( )dz zw i (+ )dz zw 2 dz w = f, (z) i( z2 )dz f, (z) (+z2 )dz f, (z) 2idz z z ( z )(z + )., (3.7) Note that the first integral in the above sum in equation (3.7) is the Weierstrass integral for a helicoid, since Weierstrass data for a helicoid is g(z) = z, η(z) = idz. If is large, then the vertical distance between adjacent planar ends of Ŕ is approximately 2π. This can be verified by integrating the third function in the integrand of the Weierstrass representation from + to along the half of the unit circle lying in the upper half of the complex plane. This curve is z = e it,0 t π. The distance between adjacent planar ends for large is π 2 ie it dt π 2 idt Re Re = 2π. 0 e it (e it )(e it + ) 0 The major difference from the proof in the case 0 is this: When is close to, then a homologically nontrivial loop in ÁL, has a nonzero real period with respect to the 9
10 Weierstrass integral. Now one may only assume that a path from z = to z = p in A L has length less than cnl, where n is the number of times that the path wraps about the origin, and c is some fixed constant. Since the distance between adjacent ends is approximately 2π, it follows that if the wrapping number n about the origin of a path from to p is sufficiently large, then z = p will be mapped by the Weierstrass integral to a point outside B r. Thus, we may assume there is an upper bound N for n, depending only on r. Hence, for large, we may assume that any path from to p has length less than ćl, where ć = cn. The other parts of the proof of the case transfer directly from the proof of the case 0. Corollary 3. As, the radius of any level-circle of Ŕ diverges to infinity. Corollary 3.2 The planar curve described by the set of centers of the horizontal circles that foliate Ŕ has the property that its maximum curvature approaches zero as. It remains to determine what other surfaces are limits of Riemann examples. Three possibilities are clear: a single flat plane; an infinite number of equally-spaced flat planes; and another Riemann example. The following proposition states that these are the only other possibilities, completing the proof of Theorem.. Proposition 3.2 Any convergent sequence of Riemann examples converges to one of the following surfaces: a Riemann example; a helicoid; a catenoid; a single flat plane; an infinite number of equally-spaced flat planes. Proof. Let {R j } j= be a sequence of Riemann examples converging to a surface S. From the definition of convergence, S is clearly minimal, properly embedded, and complete. Without loss of generality we may assume that the limiting normals v j at the ends of the surfaces R j converge in S 2 to a vertical vector. With this normalization, the surfaces R j are foliated by circles and lines lying in planes that are becoming horizontal as j. These almosthorizontal planes intersect R j in connected sets, and these connected sets each consist of a single circle or a single line. Thus every curve S {x 3 = c} is the limit set of a sequence of circles and/or lines. It follows that S {x 3 = c} is either a circle, a line, the empty set or the plane {x 3 = c}. Recall from the introduction that this implies that each component of S is either a helicoid, a catenoid, a Riemann example or a plane. Moreover: the helicoid and catenoid must have vertical axes; the plane and the ends of the Riemann example must be horizontal. If S has more than one component, they must all be horizontal planes (because 0
11 S is fibred by circles or lines, one in each horizontal plane). Suppose S consists of two or more horizontal planes. Since the points on the surfaces R j where the Gauss map is vertical must approach the ends of R j as j, it is the equally spaced-ends of the surfaces R j that converge to S. Therefore S is an infinite collection of equally-spaced planes. References [En] [HKR] [Ni] [Os] [Ri] A. Enneper. Die cyklischen Flächen. Z. Math. u. Phys. 4, 869, p D. Hoffman, H. Karcher, and H. Rosenberg. Embedded Minimal Annuli in R 3 Bounded by a Pair of Straight Lines. Commentarii Mathematici Helvetici, vol. 66, p599-67, 99. Johannes C. C. Nitsche. Lectures on Minimal Surfaces Vol.. Cambridge University Press, New York, NY, 989. Robert Osserman. A Survey of Minimal Surfaces. Dover Publications, Inc., New York, NY, 986. B. Riemann. Gesammelte mathematische Werke. 2nd edition, B. G. Teubner, Leipzig, 892.
arxiv:math/ v1 [math.dg] 1 Jul 1993
![arxiv:math/ v1 [math.dg] 1 Jul 1993](/thumbs/89/97840919.jpg "arxiv:math/ v1 [math.dg] 1 Jul 1993") APPEARED IN BULLETIN OF THE AMERICAN MATHEMATICAL SOCIETY Volume 29, Number 1, July 1993, Pages 77-84 ADDING HANDLES TO THE HELICOID DAVID HOFFMAN, FUSHENG WEI, AND HERMANN KARCHER arxiv:math/9307226v1
APPEARED IN BULLETIN OF THE AMERICAN MATHEMATICAL SOCIETY Volume 29, Number 1, July 1993, Pages 77-84 ADDING HANDLES TO THE HELICOID DAVID HOFFMAN, FUSHENG WEI, AND HERMANN KARCHER arxiv:math/9307226v1
arxiv: v1 [math.dg] 19 Jun 2017
![arxiv: v1 [math.dg] 19 Jun 2017](/thumbs/89/98745009.jpg "arxiv: v1 [math.dg] 19 Jun 2017") LIMITING BEHAVIOR OF SEQUENCES OF PROPERLY EMBEDDED MINIMAL DISKS arxiv:1706.06186v1 [math.dg] 19 Jun 2017 DAVID HOFFMAN AND BRIAN WHITE Abstract. We develop a theory of minimal θ-graphs and characterize
LIMITING BEHAVIOR OF SEQUENCES OF PROPERLY EMBEDDED MINIMAL DISKS arxiv:1706.06186v1 [math.dg] 19 Jun 2017 DAVID HOFFMAN AND BRIAN WHITE Abstract. We develop a theory of minimal θ-graphs and characterize
Modern Examples of Complete Embedded Minimal Surfaces of Finite Total Curvature
 Modern Examples of Complete Embedded Minimal Surfaces of Finite Total Curvature David Glasser December 14, 2004 1. Introduction. A natural class of minimal surfaces to study are the embedded minimal surfaces
Modern Examples of Complete Embedded Minimal Surfaces of Finite Total Curvature David Glasser December 14, 2004 1. Introduction. A natural class of minimal surfaces to study are the embedded minimal surfaces
arxiv: v1 [math.dg] 21 Apr 2016
![arxiv: v1 [math.dg] 21 Apr 2016](/thumbs/93/113698690.jpg "arxiv: v1 [math.dg] 21 Apr 2016") AN END-TO-END CONSTRUCTION OF DOUBLY PERIODIC MINIMAL SURFACES PETER CONNOR AND KEVIN LI arxiv:1604.06440v1 math.dg] 21 Apr 2016 Abstract. Using Traizet s regeneration method, we prove that for each positive
AN END-TO-END CONSTRUCTION OF DOUBLY PERIODIC MINIMAL SURFACES PETER CONNOR AND KEVIN LI arxiv:1604.06440v1 math.dg] 21 Apr 2016 Abstract. Using Traizet s regeneration method, we prove that for each positive
MATH 722, COMPLEX ANALYSIS, SPRING 2009 PART 5
 MATH 722, COMPLEX ANALYSIS, SPRING 2009 PART 5.. The Arzela-Ascoli Theorem.. The Riemann mapping theorem Let X be a metric space, and let F be a family of continuous complex-valued functions on X. We have
MATH 722, COMPLEX ANALYSIS, SPRING 2009 PART 5.. The Arzela-Ascoli Theorem.. The Riemann mapping theorem Let X be a metric space, and let F be a family of continuous complex-valued functions on X. We have
HELICOIDAL MINIMAL SURFACES OF PRESCRIBED GENUS
 HELICOIDAL MINIMAL SURFACES OF PRESCRIBED GENUS DAVID HOFFMAN, MARTIN TRAIZET, AND BRIAN WHITE Abstract. For every genus g, we prove that S 2 R contains complete, properly embedded, genus-g minimal surfaces
HELICOIDAL MINIMAL SURFACES OF PRESCRIBED GENUS DAVID HOFFMAN, MARTIN TRAIZET, AND BRIAN WHITE Abstract. For every genus g, we prove that S 2 R contains complete, properly embedded, genus-g minimal surfaces
Periodic constant mean curvature surfaces in H 2 R
 Periodic constant mean curvature surfaces in H 2 R Laurent Mazet, M. Magdalena Rodríguez and Harold Rosenberg June 8, 2011 1 Introduction A properly embedded surface Σ in H 2 R, invariant by a non-trivial
Periodic constant mean curvature surfaces in H 2 R Laurent Mazet, M. Magdalena Rodríguez and Harold Rosenberg June 8, 2011 1 Introduction A properly embedded surface Σ in H 2 R, invariant by a non-trivial
On the genus of triply periodic minimal surfaces
 On the genus of triply periodic minimal surfaces Martin Traizet December 21, 2006 Abstract : we prove the existence of embedded minimal surfaces of arbitrary genus g 3 in any flat 3-torus. In fact we construct
On the genus of triply periodic minimal surfaces Martin Traizet December 21, 2006 Abstract : we prove the existence of embedded minimal surfaces of arbitrary genus g 3 in any flat 3-torus. In fact we construct
Introduction to Minimal Surface Theory: Lecture 2
 Introduction to Minimal Surface Theory: Lecture 2 Brian White July 2, 2013 (Park City) Other characterizations of 2d minimal surfaces in R 3 By a theorem of Morrey, every surface admits local isothermal
Introduction to Minimal Surface Theory: Lecture 2 Brian White July 2, 2013 (Park City) Other characterizations of 2d minimal surfaces in R 3 By a theorem of Morrey, every surface admits local isothermal
Minimal surfaces with the area growth of two planes; the case of infinite symmetry
 arxiv:math/0501110v1 [math.dg] 8 Jan 005 Minimal surfaces with the area growth of two planes; the case of infinite symmetry William H. Meeks III Department of Mathematics University of Massachusetts Amherst,
arxiv:math/0501110v1 [math.dg] 8 Jan 005 Minimal surfaces with the area growth of two planes; the case of infinite symmetry William H. Meeks III Department of Mathematics University of Massachusetts Amherst,
On the Weierstrass-Enneper Representation of Minimal Surfaces
 On the Weierstrass-Enneper Representation of Minimal Surfaces Albin Ingelström Bachelor s thesis 2017:K15 Faculty of Science Centre for Mathematical Sciences Mathematics CENTRUM SCIENTIARUM MATHEMATICARUM
On the Weierstrass-Enneper Representation of Minimal Surfaces Albin Ingelström Bachelor s thesis 2017:K15 Faculty of Science Centre for Mathematical Sciences Mathematics CENTRUM SCIENTIARUM MATHEMATICARUM
Möbius Transformation
 Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
ERRATUM TO AFFINE MANIFOLDS, SYZ GEOMETRY AND THE Y VERTEX
 ERRATUM TO AFFINE MANIFOLDS, SYZ GEOMETRY AND THE Y VERTEX JOHN LOFTIN, SHING-TUNG YAU, AND ERIC ZASLOW 1. Main result The purpose of this erratum is to correct an error in the proof of the main result
ERRATUM TO AFFINE MANIFOLDS, SYZ GEOMETRY AND THE Y VERTEX JOHN LOFTIN, SHING-TUNG YAU, AND ERIC ZASLOW 1. Main result The purpose of this erratum is to correct an error in the proof of the main result
An Introduction to Complex Analysis and Geometry John P. D Angelo, Pure and Applied Undergraduate Texts Volume 12, American Mathematical Society, 2010
 An Introduction to Complex Analysis and Geometry John P. D Angelo, Pure and Applied Undergraduate Texts Volume 12, American Mathematical Society, 2010 John P. D Angelo, Univ. of Illinois, Urbana IL 61801.
An Introduction to Complex Analysis and Geometry John P. D Angelo, Pure and Applied Undergraduate Texts Volume 12, American Mathematical Society, 2010 John P. D Angelo, Univ. of Illinois, Urbana IL 61801.
arxiv: v2 [math.ds] 9 Jun 2013
![arxiv: v2 [math.ds] 9 Jun 2013](/thumbs/86/93829905.jpg "arxiv: v2 [math.ds] 9 Jun 2013") SHAPES OF POLYNOMIAL JULIA SETS KATHRYN A. LINDSEY arxiv:209.043v2 [math.ds] 9 Jun 203 Abstract. Any Jordan curve in the complex plane can be approximated arbitrarily well in the Hausdorff topology by
SHAPES OF POLYNOMIAL JULIA SETS KATHRYN A. LINDSEY arxiv:209.043v2 [math.ds] 9 Jun 203 Abstract. Any Jordan curve in the complex plane can be approximated arbitrarily well in the Hausdorff topology by
11 COMPLEX ANALYSIS IN C. 1.1 Holomorphic Functions
 11 COMPLEX ANALYSIS IN C 1.1 Holomorphic Functions A domain Ω in the complex plane C is a connected, open subset of C. Let z o Ω and f a map f : Ω C. We say that f is real differentiable at z o if there
11 COMPLEX ANALYSIS IN C 1.1 Holomorphic Functions A domain Ω in the complex plane C is a connected, open subset of C. Let z o Ω and f a map f : Ω C. We say that f is real differentiable at z o if there
Commensurability between once-punctured torus groups and once-punctured Klein bottle groups
 Hiroshima Math. J. 00 (0000), 1 34 Commensurability between once-punctured torus groups and once-punctured Klein bottle groups Mikio Furokawa (Received Xxx 00, 0000) Abstract. The once-punctured torus
Hiroshima Math. J. 00 (0000), 1 34 Commensurability between once-punctured torus groups and once-punctured Klein bottle groups Mikio Furokawa (Received Xxx 00, 0000) Abstract. The once-punctured torus
arxiv: v1 [math.dg] 20 Mar 2017
![arxiv: v1 [math.dg] 20 Mar 2017](/thumbs/87/95212329.jpg "arxiv: v1 [math.dg] 20 Mar 2017") Triply periodic zero mean curvature surfaces in Lorentz-Minkowski 3-space arxiv:1703.06600v1 [math.dg] 20 Mar 2017 Shoichi Fujimori Abstract. We construct triply periodic zero mean curvature surfaces of
Triply periodic zero mean curvature surfaces in Lorentz-Minkowski 3-space arxiv:1703.06600v1 [math.dg] 20 Mar 2017 Shoichi Fujimori Abstract. We construct triply periodic zero mean curvature surfaces of
6 6 DISCRETE GROUPS. 6.1 Discontinuous Group Actions
 6 6 DISCRETE GROUPS 6.1 Discontinuous Group Actions Let G be a subgroup of Möb(D). This group acts discontinuously on D if, for every compact subset K of D, the set {T G : T (K) K } is finite. Proposition
6 6 DISCRETE GROUPS 6.1 Discontinuous Group Actions Let G be a subgroup of Möb(D). This group acts discontinuously on D if, for every compact subset K of D, the set {T G : T (K) K } is finite. Proposition
Fuchsian groups. 2.1 Definitions and discreteness
 2 Fuchsian groups In the previous chapter we introduced and studied the elements of Mob(H), which are the real Moebius transformations. In this chapter we focus the attention of special subgroups of this
2 Fuchsian groups In the previous chapter we introduced and studied the elements of Mob(H), which are the real Moebius transformations. In this chapter we focus the attention of special subgroups of this
CONFORMAL STRUCTURE OF MINIMAL SURFACES WITH FINITE TOPOLOGY
 CONFORMAL STRUCTURE OF MINIMAL SURFACES WITH FINITE TOPOLOGY JACOB BERNSTEIN AND CHRISTINE BREINER Abstract. In this paper we show that a complete, embedded minimal surface in R 3, with finite topology
CONFORMAL STRUCTURE OF MINIMAL SURFACES WITH FINITE TOPOLOGY JACOB BERNSTEIN AND CHRISTINE BREINER Abstract. In this paper we show that a complete, embedded minimal surface in R 3, with finite topology
The Minimal Element Theorem
 The Minimal Element Theorem The CMC Dynamics Theorem deals with describing all of the periodic or repeated geometric behavior of a properly embedded CMC surface with bounded second fundamental form in
The Minimal Element Theorem The CMC Dynamics Theorem deals with describing all of the periodic or repeated geometric behavior of a properly embedded CMC surface with bounded second fundamental form in
Minimal submanifolds: old and new
 Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Part II. Geometry and Groups. Year
 Part II Year 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2014 Paper 4, Section I 3F 49 Define the limit set Λ(G) of a Kleinian group G. Assuming that G has no finite orbit in H 3 S 2, and that Λ(G),
Part II Year 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2014 Paper 4, Section I 3F 49 Define the limit set Λ(G) of a Kleinian group G. Assuming that G has no finite orbit in H 3 S 2, and that Λ(G),
On the local connectivity of limit sets of Kleinian groups
 On the local connectivity of limit sets of Kleinian groups James W. Anderson and Bernard Maskit Department of Mathematics, Rice University, Houston, TX 77251 Department of Mathematics, SUNY at Stony Brook,
On the local connectivity of limit sets of Kleinian groups James W. Anderson and Bernard Maskit Department of Mathematics, Rice University, Houston, TX 77251 Department of Mathematics, SUNY at Stony Brook,
Singular Perturbations in the McMullen Domain
 Singular Perturbations in the McMullen Domain Robert L. Devaney Sebastian M. Marotta Department of Mathematics Boston University January 5, 2008 Abstract In this paper we study the dynamics of the family
Singular Perturbations in the McMullen Domain Robert L. Devaney Sebastian M. Marotta Department of Mathematics Boston University January 5, 2008 Abstract In this paper we study the dynamics of the family
The result above is known as the Riemann mapping theorem. We will prove it using basic theory of normal families. We start this lecture with that.
 Lecture 15 The Riemann mapping theorem Variables MATH-GA 2451.1 Complex The point of this lecture is to prove that the unit disk can be mapped conformally onto any simply connected open set in the plane,
Lecture 15 The Riemann mapping theorem Variables MATH-GA 2451.1 Complex The point of this lecture is to prove that the unit disk can be mapped conformally onto any simply connected open set in the plane,
TEICHMÜLLER SPACE MATTHEW WOOLF
 TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
Chapter 16. Manifolds and Geodesics Manifold Theory. Reading: Osserman [7] Pg , 55, 63-65, Do Carmo [2] Pg ,
![Chapter 16. Manifolds and Geodesics Manifold Theory. Reading: Osserman [7] Pg , 55, 63-65, Do Carmo [2] Pg ,](/thumbs/81/84541290.jpg "Chapter 16. Manifolds and Geodesics Manifold Theory. Reading: Osserman [7] Pg , 55, 63-65, Do Carmo [2] Pg ,") Chapter 16 Manifolds and Geodesics Reading: Osserman [7] Pg. 43-52, 55, 63-65, Do Carmo [2] Pg. 238-247, 325-335. 16.1 Manifold Theory Let us recall the definition of differentiable manifolds Definition
Chapter 16 Manifolds and Geodesics Reading: Osserman [7] Pg. 43-52, 55, 63-65, Do Carmo [2] Pg. 238-247, 325-335. 16.1 Manifold Theory Let us recall the definition of differentiable manifolds Definition
DIFFERENTIAL GEOMETRY HW 5
 DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
Extremal eigenvalue problems for surfaces
 Extremal eigenvalue problems for surfaces Richard Schoen Stanford University - Chen-Jung Hsu Lecture 3, Academia Sinica, ROC - December 4, 2013 Plan of Lecture The general lecture plan: Part 1: Introduction:
Extremal eigenvalue problems for surfaces Richard Schoen Stanford University - Chen-Jung Hsu Lecture 3, Academia Sinica, ROC - December 4, 2013 Plan of Lecture The general lecture plan: Part 1: Introduction:
9 Conformal Types of Riemann Surfaces
 9 Conformal Types of Riemann Surfaces We will discuss complete minimal surfaces of finite topological type and their annular ends. We need first consider a little of the conformal type of such surfaces.
9 Conformal Types of Riemann Surfaces We will discuss complete minimal surfaces of finite topological type and their annular ends. We need first consider a little of the conformal type of such surfaces.
AN INTEGRAL FORMULA FOR TRIPLE LINKING IN HYPERBOLIC SPACE
 AN INTEGRAL FORMULA FOR TRIPLE LINKING IN HYPERBOLIC SPACE PAUL GALLAGHER AND TIANYOU ZHOU Abstract. We provide a geometrically natural formula for the triple linking number of 3 pairwise unlinked curves
AN INTEGRAL FORMULA FOR TRIPLE LINKING IN HYPERBOLIC SPACE PAUL GALLAGHER AND TIANYOU ZHOU Abstract. We provide a geometrically natural formula for the triple linking number of 3 pairwise unlinked curves
IV. Conformal Maps. 1. Geometric interpretation of differentiability. 2. Automorphisms of the Riemann sphere: Möbius transformations
 MTH6111 Complex Analysis 2009-10 Lecture Notes c Shaun Bullett 2009 IV. Conformal Maps 1. Geometric interpretation of differentiability We saw from the definition of complex differentiability that if f
MTH6111 Complex Analysis 2009-10 Lecture Notes c Shaun Bullett 2009 IV. Conformal Maps 1. Geometric interpretation of differentiability We saw from the definition of complex differentiability that if f
ON RIBAUCOUR TRANSFORMATIONS AND MINIMAL SURFACES. M. V. Lemes K. Tenenblat. To the memory of José Fernando Escobar
 Matemática Contemporânea, Vol 9, 13-40 c 005, Sociedade Brasileira de Matemática ON RIBAUCOUR TRANSFORMATIONS AND MINIMAL SURFACES M. V. Lemes K. Tenenblat To the memory of José Fernando Escobar Abstract
Matemática Contemporânea, Vol 9, 13-40 c 005, Sociedade Brasileira de Matemática ON RIBAUCOUR TRANSFORMATIONS AND MINIMAL SURFACES M. V. Lemes K. Tenenblat To the memory of José Fernando Escobar Abstract
Free Boundary Minimal Surfaces in the Unit 3-Ball
 Free Boundary Minimal Surfaces in the Unit 3-Ball T. Zolotareva (joint work with A. Folha and F. Pacard) CMLS, Ecole polytechnique December 15 2015 Free boundary minimal surfaces in B 3 Denition : minimal
Free Boundary Minimal Surfaces in the Unit 3-Ball T. Zolotareva (joint work with A. Folha and F. Pacard) CMLS, Ecole polytechnique December 15 2015 Free boundary minimal surfaces in B 3 Denition : minimal
Quasi-conformal maps and Beltrami equation
 Chapter 7 Quasi-conformal maps and Beltrami equation 7. Linear distortion Assume that f(x + iy) =u(x + iy)+iv(x + iy) be a (real) linear map from C C that is orientation preserving. Let z = x + iy and
Chapter 7 Quasi-conformal maps and Beltrami equation 7. Linear distortion Assume that f(x + iy) =u(x + iy)+iv(x + iy) be a (real) linear map from C C that is orientation preserving. Let z = x + iy and
The Classification of Nonsimple Algebraic Tangles
 The Classification of Nonsimple Algebraic Tangles Ying-Qing Wu 1 A tangle is a pair (B, T ), where B is a 3-ball, T is a pair of properly embedded arcs. When there is no ambiguity we will simply say that
The Classification of Nonsimple Algebraic Tangles Ying-Qing Wu 1 A tangle is a pair (B, T ), where B is a 3-ball, T is a pair of properly embedded arcs. When there is no ambiguity we will simply say that
Quasiconformal Maps and Circle Packings
 Quasiconformal Maps and Circle Packings Brett Leroux June 11, 2018 1 Introduction Recall the statement of the Riemann mapping theorem: Theorem 1 (Riemann Mapping). If R is a simply connected region in
Quasiconformal Maps and Circle Packings Brett Leroux June 11, 2018 1 Introduction Recall the statement of the Riemann mapping theorem: Theorem 1 (Riemann Mapping). If R is a simply connected region in
PICARD S THEOREM STEFAN FRIEDL
 PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
The geometry of minimal surfaces of finite genus III; bounds on the topology and index of classical minimal surfaces.
 The geometry of minimal surfaces of finite genus III; bounds on the topology and index of classical minimal surfaces. William H. Meeks III Joaquín Pérez Antonio Ros, September 24, 2005 Abstract We prove
The geometry of minimal surfaces of finite genus III; bounds on the topology and index of classical minimal surfaces. William H. Meeks III Joaquín Pérez Antonio Ros, September 24, 2005 Abstract We prove
arxiv:math/ v1 [math.dg] 25 Feb 2005
![arxiv:math/ v1 [math.dg] 25 Feb 2005](/thumbs/94/121762353.jpg "arxiv:math/ v1 [math.dg] 25 Feb 2005") arxiv:math/0502551v1 [math.dg] 25 Feb 2005 A GENERALIZATION OF RADO S THEOREM FOR ALMOST GRAPHICAL BOUNDARIES BRIAN DEAN AND GIUSEPPE TINAGLIA Abstract. In this paper, we prove a generalization of Rado
arxiv:math/0502551v1 [math.dg] 25 Feb 2005 A GENERALIZATION OF RADO S THEOREM FOR ALMOST GRAPHICAL BOUNDARIES BRIAN DEAN AND GIUSEPPE TINAGLIA Abstract. In this paper, we prove a generalization of Rado
Definition We say that a topological manifold X is C p if there is an atlas such that the transition functions are C p.
 13. Riemann surfaces Definition 13.1. Let X be a topological space. We say that X is a topological manifold, if (1) X is Hausdorff, (2) X is 2nd countable (that is, there is a base for the topology which
13. Riemann surfaces Definition 13.1. Let X be a topological space. We say that X is a topological manifold, if (1) X is Hausdorff, (2) X is 2nd countable (that is, there is a base for the topology which
CONSEQUENCES OF POWER SERIES REPRESENTATION
 CONSEQUENCES OF POWER SERIES REPRESENTATION 1. The Uniqueness Theorem Theorem 1.1 (Uniqueness). Let Ω C be a region, and consider two analytic functions f, g : Ω C. Suppose that S is a subset of Ω that
CONSEQUENCES OF POWER SERIES REPRESENTATION 1. The Uniqueness Theorem Theorem 1.1 (Uniqueness). Let Ω C be a region, and consider two analytic functions f, g : Ω C. Suppose that S is a subset of Ω that
Theorem [Mean Value Theorem for Harmonic Functions] Let u be harmonic on D(z 0, R). Then for any r (0, R), u(z 0 ) = 1 z z 0 r
![Theorem [Mean Value Theorem for Harmonic Functions] Let u be harmonic on D(z 0, R). Then for any r (0, R), u(z 0 ) = 1 z z 0 r](/thumbs/77/75527144.jpg "Theorem [Mean Value Theorem for Harmonic Functions] Let u be harmonic on D(z 0, R). Then for any r (0, R), u(z 0 ) = 1 z z 0 r") 2. A harmonic conjugate always exists locally: if u is a harmonic function in an open set U, then for any disk D(z 0, r) U, there is f, which is analytic in D(z 0, r) and satisfies that Re f u. Since such
2. A harmonic conjugate always exists locally: if u is a harmonic function in an open set U, then for any disk D(z 0, r) U, there is f, which is analytic in D(z 0, r) and satisfies that Re f u. Since such
Review of complex analysis in one variable
 CHAPTER 130 Review of complex analysis in one variable This gives a brief review of some of the basic results in complex analysis. In particular, it outlines the background in single variable complex analysis
CHAPTER 130 Review of complex analysis in one variable This gives a brief review of some of the basic results in complex analysis. In particular, it outlines the background in single variable complex analysis
8 8 THE RIEMANN MAPPING THEOREM. 8.1 Simply Connected Surfaces
 8 8 THE RIEMANN MAPPING THEOREM 8.1 Simply Connected Surfaces Our aim is to prove the Riemann Mapping Theorem which states that every simply connected Riemann surface R is conformally equivalent to D,
8 8 THE RIEMANN MAPPING THEOREM 8.1 Simply Connected Surfaces Our aim is to prove the Riemann Mapping Theorem which states that every simply connected Riemann surface R is conformally equivalent to D,
MATH 566 LECTURE NOTES 4: ISOLATED SINGULARITIES AND THE RESIDUE THEOREM
 MATH 566 LECTURE NOTES 4: ISOLATED SINGULARITIES AND THE RESIDUE THEOREM TSOGTGEREL GANTUMUR 1. Functions holomorphic on an annulus Let A = D R \D r be an annulus centered at 0 with 0 < r < R
MATH 566 LECTURE NOTES 4: ISOLATED SINGULARITIES AND THE RESIDUE THEOREM TSOGTGEREL GANTUMUR 1. Functions holomorphic on an annulus Let A = D R \D r be an annulus centered at 0 with 0 < r < R
Chapter 6: The metric space M(G) and normal families
 and normal families") Chapter 6: The metric space MG) and normal families Course 414, 003 04 March 9, 004 Remark 6.1 For G C open, we recall the notation MG) for the set algebra) of all meromorphic functions on G. We now consider
Chapter 6: The metric space MG) and normal families Course 414, 003 04 March 9, 004 Remark 6.1 For G C open, we recall the notation MG) for the set algebra) of all meromorphic functions on G. We now consider
Examples of Minimal Surfaces
 Examples of Minimal Surfaces Michael Beeson March 9, 2015 Contents 1 Enneper s Surface 2 1.1 Weierstrass representation...................... 2 1.2 Non-parametric form......................... 2 1.3 total
Examples of Minimal Surfaces Michael Beeson March 9, 2015 Contents 1 Enneper s Surface 2 1.1 Weierstrass representation...................... 2 1.2 Non-parametric form......................... 2 1.3 total
Riemann Mapping Theorem (4/10-4/15)
") Math 752 Spring 2015 Riemann Mapping Theorem (4/10-4/15) Definition 1. A class F of continuous functions defined on an open set G is called a normal family if every sequence of elements in F contains a
Math 752 Spring 2015 Riemann Mapping Theorem (4/10-4/15) Definition 1. A class F of continuous functions defined on an open set G is called a normal family if every sequence of elements in F contains a
New Deformations of Classical Minimal Surfaces
 New Deformations of Classical Minimal Surfaces Adam G. Weyhaupt Department of Mathematics Indiana University Southern Illinois University Edwardsville March 7, 2006 Outline Minimal surfaces: definitions,
New Deformations of Classical Minimal Surfaces Adam G. Weyhaupt Department of Mathematics Indiana University Southern Illinois University Edwardsville March 7, 2006 Outline Minimal surfaces: definitions,
Notes on Complex Analysis
 Michael Papadimitrakis Notes on Complex Analysis Department of Mathematics University of Crete Contents The complex plane.. The complex plane...................................2 Argument and polar representation.........................
Michael Papadimitrakis Notes on Complex Analysis Department of Mathematics University of Crete Contents The complex plane.. The complex plane...................................2 Argument and polar representation.........................
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
The Geometrization Theorem
 The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
1. If 1, ω, ω 2, -----, ω 9 are the 10 th roots of unity, then (1 + ω) (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0
 (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0") 4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
III. Consequences of Cauchy s Theorem
 MTH6 Complex Analysis 2009-0 Lecture Notes c Shaun Bullett 2009 III. Consequences of Cauchy s Theorem. Cauchy s formulae. Cauchy s Integral Formula Let f be holomorphic on and everywhere inside a simple
MTH6 Complex Analysis 2009-0 Lecture Notes c Shaun Bullett 2009 III. Consequences of Cauchy s Theorem. Cauchy s formulae. Cauchy s Integral Formula Let f be holomorphic on and everywhere inside a simple
COMPLETELY INVARIANT JULIA SETS OF POLYNOMIAL SEMIGROUPS
 Series Logo Volume 00, Number 00, Xxxx 19xx COMPLETELY INVARIANT JULIA SETS OF POLYNOMIAL SEMIGROUPS RICH STANKEWITZ Abstract. Let G be a semigroup of rational functions of degree at least two, under composition
Series Logo Volume 00, Number 00, Xxxx 19xx COMPLETELY INVARIANT JULIA SETS OF POLYNOMIAL SEMIGROUPS RICH STANKEWITZ Abstract. Let G be a semigroup of rational functions of degree at least two, under composition
Part IB GEOMETRY (Lent 2016): Example Sheet 1
: Example Sheet 1") Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
An extremal eigenvalue problem for surfaces with boundary
 An extremal eigenvalue problem for surfaces with boundary Richard Schoen Stanford University - Conference in Geometric Analysis, UC Irvine - January 15, 2012 - Joint project with Ailana Fraser Plan of
An extremal eigenvalue problem for surfaces with boundary Richard Schoen Stanford University - Conference in Geometric Analysis, UC Irvine - January 15, 2012 - Joint project with Ailana Fraser Plan of
Complex Analysis MATH 6300 Fall 2013 Homework 4
 Complex Analysis MATH 6300 Fall 2013 Homework 4 Due Wednesday, December 11 at 5 PM Note that to get full credit on any problem in this class, you must solve the problems in an efficient and elegant manner,
Complex Analysis MATH 6300 Fall 2013 Homework 4 Due Wednesday, December 11 at 5 PM Note that to get full credit on any problem in this class, you must solve the problems in an efficient and elegant manner,
Hyperbolic geometry of Riemann surfaces
 3 Hyperbolic geometry of Riemann surfaces By Theorem 1.8.8, all hyperbolic Riemann surfaces inherit the geometry of the hyperbolic plane. How this geometry interacts with the topology of a Riemann surface
3 Hyperbolic geometry of Riemann surfaces By Theorem 1.8.8, all hyperbolic Riemann surfaces inherit the geometry of the hyperbolic plane. How this geometry interacts with the topology of a Riemann surface
F (z) =f(z). f(z) = a n (z z 0 ) n. F (z) = a n (z z 0 ) n
 =f(z). f(z) = a n (z z 0 ) n. F (z) = a n (z z 0 ) n") 6 Chapter 2. CAUCHY S THEOREM AND ITS APPLICATIONS Theorem 5.6 (Schwarz reflection principle) Suppose that f is a holomorphic function in Ω + that extends continuously to I and such that f is real-valued
6 Chapter 2. CAUCHY S THEOREM AND ITS APPLICATIONS Theorem 5.6 (Schwarz reflection principle) Suppose that f is a holomorphic function in Ω + that extends continuously to I and such that f is real-valued
A RAPID INTRODUCTION TO COMPLEX ANALYSIS
 A RAPID INTRODUCTION TO COMPLEX ANALYSIS AKHIL MATHEW ABSTRACT. These notes give a rapid introduction to some of the basic results in complex analysis, assuming familiarity from the reader with Stokes
A RAPID INTRODUCTION TO COMPLEX ANALYSIS AKHIL MATHEW ABSTRACT. These notes give a rapid introduction to some of the basic results in complex analysis, assuming familiarity from the reader with Stokes
274 Curves on Surfaces, Lecture 4
 274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
III.2. Analytic Functions
 III.2. Analytic Functions 1 III.2. Analytic Functions Recall. When you hear analytic function, think power series representation! Definition. If G is an open set in C and f : G C, then f is differentiable
III.2. Analytic Functions 1 III.2. Analytic Functions Recall. When you hear analytic function, think power series representation! Definition. If G is an open set in C and f : G C, then f is differentiable
1 Holomorphic functions
 Robert Oeckl CA NOTES 1 15/09/2009 1 1 Holomorphic functions 11 The complex derivative The basic objects of complex analysis are the holomorphic functions These are functions that posses a complex derivative
Robert Oeckl CA NOTES 1 15/09/2009 1 1 Holomorphic functions 11 The complex derivative The basic objects of complex analysis are the holomorphic functions These are functions that posses a complex derivative
A FUCHSIAN GROUP PROOF OF THE HYPERELLIPTICITY OF RIEMANN SURFACES OF GENUS 2
 Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 28, 2003, 69 74 A FUCHSIAN GROUP PROOF OF THE HYPERELLIPTICITY OF RIEMANN SURFACES OF GENUS 2 Yolanda Fuertes and Gabino González-Diez Universidad
Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 28, 2003, 69 74 A FUCHSIAN GROUP PROOF OF THE HYPERELLIPTICITY OF RIEMANN SURFACES OF GENUS 2 Yolanda Fuertes and Gabino González-Diez Universidad
Research Statement. Jayadev S. Athreya. November 7, 2005
 Research Statement Jayadev S. Athreya November 7, 2005 1 Introduction My primary area of research is the study of dynamics on moduli spaces. The first part of my thesis is on the recurrence behavior of
Research Statement Jayadev S. Athreya November 7, 2005 1 Introduction My primary area of research is the study of dynamics on moduli spaces. The first part of my thesis is on the recurrence behavior of
DIFFERENTIAL GEOMETRY, LECTURE 16-17, JULY 14-17
 DIFFERENTIAL GEOMETRY, LECTURE 16-17, JULY 14-17 6. Geodesics A parametrized line γ : [a, b] R n in R n is straight (and the parametrization is uniform) if the vector γ (t) does not depend on t. Thus,
DIFFERENTIAL GEOMETRY, LECTURE 16-17, JULY 14-17 6. Geodesics A parametrized line γ : [a, b] R n in R n is straight (and the parametrization is uniform) if the vector γ (t) does not depend on t. Thus,
Minimal Surfaces. Clay Shonkwiler
 Minimal Surfaces Clay Shonkwiler October 18, 2006 Soap Films A soap film seeks to minimize its surface energy, which is proportional to area. Hence, a soap film achieves a minimum area among all surfaces
Minimal Surfaces Clay Shonkwiler October 18, 2006 Soap Films A soap film seeks to minimize its surface energy, which is proportional to area. Hence, a soap film achieves a minimum area among all surfaces
Continued fractions and geodesics on the modular surface
 Continued fractions and geodesics on the modular surface Chris Johnson Clemson University September 8, 203 Outline The modular surface Continued fractions Symbolic coding References Some hyperbolic geometry
Continued fractions and geodesics on the modular surface Chris Johnson Clemson University September 8, 203 Outline The modular surface Continued fractions Symbolic coding References Some hyperbolic geometry
MORE CONSEQUENCES OF CAUCHY S THEOREM
 MOE CONSEQUENCES OF CAUCHY S THEOEM Contents. The Mean Value Property and the Maximum-Modulus Principle 2. Morera s Theorem and some applications 3 3. The Schwarz eflection Principle 6 We have stated Cauchy
MOE CONSEQUENCES OF CAUCHY S THEOEM Contents. The Mean Value Property and the Maximum-Modulus Principle 2. Morera s Theorem and some applications 3 3. The Schwarz eflection Principle 6 We have stated Cauchy
A crash course the geometry of hyperbolic surfaces
 Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP
 CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP TOSHIHIRO SHODA Abstract. In this paper, we study a compact minimal surface in a 4-dimensional flat
CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP TOSHIHIRO SHODA Abstract. In this paper, we study a compact minimal surface in a 4-dimensional flat
Evolution of the McMullen Domain for Singularly Perturbed Rational Maps
 Volume 32, 2008 Pages 301 320 http://topology.auburn.edu/tp/ Evolution of the McMullen Domain for Singularly Perturbed Rational Maps by Robert L. Devaney and Sebastian M. Marotta Electronically published
Volume 32, 2008 Pages 301 320 http://topology.auburn.edu/tp/ Evolution of the McMullen Domain for Singularly Perturbed Rational Maps by Robert L. Devaney and Sebastian M. Marotta Electronically published
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
ON THE SYMMETRY OF ANNULAR BRYANT SURFACE WITH CONSTANT CONTACT ANGLE. Sung-Ho Park
 Korean J. Math. 22 (201), No. 1, pp. 133 138 http://dx.doi.org/10.11568/kjm.201.22.1.133 ON THE SYMMETRY OF ANNULAR BRYANT SURFACE WITH CONSTANT CONTACT ANGLE Sung-Ho Park Abstract. We show that a compact
Korean J. Math. 22 (201), No. 1, pp. 133 138 http://dx.doi.org/10.11568/kjm.201.22.1.133 ON THE SYMMETRY OF ANNULAR BRYANT SURFACE WITH CONSTANT CONTACT ANGLE Sung-Ho Park Abstract. We show that a compact
LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS
 LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS WEIMIN CHEN, UMASS, SPRING 07 1. Basic elements of J-holomorphic curve theory Let (M, ω) be a symplectic manifold of dimension 2n, and let J J (M, ω) be
LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS WEIMIN CHEN, UMASS, SPRING 07 1. Basic elements of J-holomorphic curve theory Let (M, ω) be a symplectic manifold of dimension 2n, and let J J (M, ω) be
E. Falbel and P.-V. Koseleff
 Mathematical Research Letters 9, 379 391 (2002) A CIRCLE OF MODULAR GROUPS IN PU(2,1) E. Falbel and P.-V. Koseleff Abstract. We prove that there exists a circle of discrete and faithful embeddings of the
Mathematical Research Letters 9, 379 391 (2002) A CIRCLE OF MODULAR GROUPS IN PU(2,1) E. Falbel and P.-V. Koseleff Abstract. We prove that there exists a circle of discrete and faithful embeddings of the
CHAPTER 2. CONFORMAL MAPPINGS 58
 CHAPTER 2. CONFORMAL MAPPINGS 58 We prove that a strong form of converse of the above statement also holds. Please note we could apply the Theorem 1.11.3 to prove the theorem. But we prefer to apply the
CHAPTER 2. CONFORMAL MAPPINGS 58 We prove that a strong form of converse of the above statement also holds. Please note we could apply the Theorem 1.11.3 to prove the theorem. But we prefer to apply the
Qualifying Exams I, 2014 Spring
 Qualifying Exams I, 2014 Spring 1. (Algebra) Let k = F q be a finite field with q elements. Count the number of monic irreducible polynomials of degree 12 over k. 2. (Algebraic Geometry) (a) Show that
Qualifying Exams I, 2014 Spring 1. (Algebra) Let k = F q be a finite field with q elements. Count the number of monic irreducible polynomials of degree 12 over k. 2. (Algebraic Geometry) (a) Show that
Complex Analysis, Stein and Shakarchi Meromorphic Functions and the Logarithm
 Complex Analysis, Stein and Shakarchi Chapter 3 Meromorphic Functions and the Logarithm Yung-Hsiang Huang 217.11.5 Exercises 1. From the identity sin πz = eiπz e iπz 2i, it s easy to show its zeros are
Complex Analysis, Stein and Shakarchi Chapter 3 Meromorphic Functions and the Logarithm Yung-Hsiang Huang 217.11.5 Exercises 1. From the identity sin πz = eiπz e iπz 2i, it s easy to show its zeros are
B 1 = {B(x, r) x = (x 1, x 2 ) H, 0 < r < x 2 }. (a) Show that B = B 1 B 2 is a basis for a topology on X.
 x = (x 1, x 2 ) H, 0 < r < x 2 }. (a) Show that B = B 1 B 2 is a basis for a topology on X.") Math 6342/7350: Topology and Geometry Sample Preliminary Exam Questions 1. For each of the following topological spaces X i, determine whether X i and X i X i are homeomorphic. (a) X 1 = [0, 1] (b) X 2
Math 6342/7350: Topology and Geometry Sample Preliminary Exam Questions 1. For each of the following topological spaces X i, determine whether X i and X i X i are homeomorphic. (a) X 1 = [0, 1] (b) X 2
Lecture 14 Conformal Mapping. 1 Conformality. 1.1 Preservation of angle. 1.2 Length and area. MATH-GA Complex Variables
 Lecture 14 Conformal Mapping MATH-GA 2451.001 Complex Variables 1 Conformality 1.1 Preservation of angle The open mapping theorem tells us that an analytic function such that f (z 0 ) 0 maps a small neighborhood
Lecture 14 Conformal Mapping MATH-GA 2451.001 Complex Variables 1 Conformality 1.1 Preservation of angle The open mapping theorem tells us that an analytic function such that f (z 0 ) 0 maps a small neighborhood
arxiv:math/ v1 [math.dg] 9 Aug 1995
![arxiv:math/ v1 [math.dg] 9 Aug 1995](/thumbs/78/78101622.jpg "arxiv:math/ v1 [math.dg] 9 Aug 1995") Complete Embedded Minimal Surfaces of Finite Total Curvature arxiv:math/9508213v1 [math.dg] 9 Aug 1995 Contents David Hoffman MSRI 1000 Centennial Drive Berkeley, CA 94720 March 16, 1995 Hermann Karcher
Complete Embedded Minimal Surfaces of Finite Total Curvature arxiv:math/9508213v1 [math.dg] 9 Aug 1995 Contents David Hoffman MSRI 1000 Centennial Drive Berkeley, CA 94720 March 16, 1995 Hermann Karcher
612 CLASS LECTURE: HYPERBOLIC GEOMETRY
 612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
Proofs of some classical theorems in minimal surface theory.
 Proofs of some classical theorems in minimal surface theory. William H. Meeks III June 9, 25 Abstract In this paper, we prove several classical theorems concerning complete embedded minimal surface in
Proofs of some classical theorems in minimal surface theory. William H. Meeks III June 9, 25 Abstract In this paper, we prove several classical theorems concerning complete embedded minimal surface in
Plane hyperbolic geometry
 2 Plane hyperbolic geometry In this chapter we will see that the unit disc D has a natural geometry, known as plane hyperbolic geometry or plane Lobachevski geometry. It is the local model for the hyperbolic
2 Plane hyperbolic geometry In this chapter we will see that the unit disc D has a natural geometry, known as plane hyperbolic geometry or plane Lobachevski geometry. It is the local model for the hyperbolic
Complex Analysis Problems
 Complex Analysis Problems transcribed from the originals by William J. DeMeo October 2, 2008 Contents 99 November 2 2 2 200 November 26 4 3 2006 November 3 6 4 2007 April 6 7 5 2007 November 6 8 99 NOVEMBER
Complex Analysis Problems transcribed from the originals by William J. DeMeo October 2, 2008 Contents 99 November 2 2 2 200 November 26 4 3 2006 November 3 6 4 2007 April 6 7 5 2007 November 6 8 99 NOVEMBER
How curvature shapes space
 How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
Mathematische Annalen
 Math. Ann. 31, 37 332 (1998 Mathematische Annalen c Springer-Verlag 1998 Riemann bilinear relations on minimal surfaces Joaquín Pérez Departamento de Geometría y Topología, Facultad de Ciencias, Universidad
Math. Ann. 31, 37 332 (1998 Mathematische Annalen c Springer-Verlag 1998 Riemann bilinear relations on minimal surfaces Joaquín Pérez Departamento de Geometría y Topología, Facultad de Ciencias, Universidad
Riemann surfaces. 3.1 Definitions
 3 Riemann surfaces In this chapter we define and give the first properties of Riemann surfaces. These are the holomorphic counterpart of the (real) differential manifolds. We will see how the Fuchsian
3 Riemann surfaces In this chapter we define and give the first properties of Riemann surfaces. These are the holomorphic counterpart of the (real) differential manifolds. We will see how the Fuchsian
arxiv: v3 [math.dg] 19 Jun 2017
![arxiv: v3 [math.dg] 19 Jun 2017](/thumbs/78/78609060.jpg "arxiv: v3 [math.dg] 19 Jun 2017") THE GEOMETRY OF THE WIGNER CAUSTIC AND AFFINE EQUIDISTANTS OF PLANAR CURVES arxiv:160505361v3 [mathdg] 19 Jun 017 WOJCIECH DOMITRZ, MICHA L ZWIERZYŃSKI Abstract In this paper we study global properties
THE GEOMETRY OF THE WIGNER CAUSTIC AND AFFINE EQUIDISTANTS OF PLANAR CURVES arxiv:160505361v3 [mathdg] 19 Jun 017 WOJCIECH DOMITRZ, MICHA L ZWIERZYŃSKI Abstract In this paper we study global properties
Bounded domains which are universal for minimal surfaces
 Bounded domains which are universal for minimal surfaces Francisco Martín William H. Meeks, III Nicolai Nadirashvili August 16, 2005 Abstract We construct open domains in R 3 which do not admit complete
Bounded domains which are universal for minimal surfaces Francisco Martín William H. Meeks, III Nicolai Nadirashvili August 16, 2005 Abstract We construct open domains in R 3 which do not admit complete
THE VOLUME OF A HYPERBOLIC 3-MANIFOLD WITH BETTI NUMBER 2. Marc Culler and Peter B. Shalen. University of Illinois at Chicago
 THE VOLUME OF A HYPERBOLIC -MANIFOLD WITH BETTI NUMBER 2 Marc Culler and Peter B. Shalen University of Illinois at Chicago Abstract. If M is a closed orientable hyperbolic -manifold with first Betti number
THE VOLUME OF A HYPERBOLIC -MANIFOLD WITH BETTI NUMBER 2 Marc Culler and Peter B. Shalen University of Illinois at Chicago Abstract. If M is a closed orientable hyperbolic -manifold with first Betti number
Part II. Algebraic Topology. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 Paper 3, Section II 18I The n-torus is the product of n circles: 5 T n = } S 1. {{.. S } 1. n times For all n 1 and 0
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 Paper 3, Section II 18I The n-torus is the product of n circles: 5 T n = } S 1. {{.. S } 1. n times For all n 1 and 0
Conformal field theory in the sense of Segal, modified for a supersymmetric context
 Conformal field theory in the sense of Segal, modified for a supersymmetric context Paul S Green January 27, 2014 1 Introduction In these notes, we will review and propose some revisions to the definition
Conformal field theory in the sense of Segal, modified for a supersymmetric context Paul S Green January 27, 2014 1 Introduction In these notes, we will review and propose some revisions to the definition
NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Complex Analysis II Lecture Notes Part II
 NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Complex Analysis II Lecture Notes Part II Chapter 2 Further properties of analytic functions 21 Local/Global behavior of analytic functions;
NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Complex Analysis II Lecture Notes Part II Chapter 2 Further properties of analytic functions 21 Local/Global behavior of analytic functions;
Systoles of hyperbolic 3-manifolds
 Math. Proc. Camb. Phil. Soc. (2000), 128, 103 Printed in the United Kingdom 2000 Cambridge Philosophical Society 103 Systoles of hyperbolic 3-manifolds BY COLIN C. ADAMS Department of Mathematics, Williams
Math. Proc. Camb. Phil. Soc. (2000), 128, 103 Printed in the United Kingdom 2000 Cambridge Philosophical Society 103 Systoles of hyperbolic 3-manifolds BY COLIN C. ADAMS Department of Mathematics, Williams