Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
|
|
|
- Stephany Mills
- 5 years ago
- Views:
Transcription
1 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
2 Modeling Modeling is the process of representing the behavior of a real system by a collection of mathematical equations and logic. Models are cause-and-effect structures they accept external information and process it with their logic and equations to produce one or more outputs. Parameter is a fixed-value unit of information Signal is a changing-unit of information Models can be text-based programming or block diagrams
3 Math Modelling Categories Static vs. dynamic Linear vs. nonlinear Time-invariant vs. time-variant SISO vs. MIMO Continuous vs. discrete Deterministic vs. stochastic
4 Static vs. Dynamic Models can be static or dynamic Static models produce no motion, fluid flow, or any other changes. 4 Example: Battery connected to resistor v = ir Dynamic models have energy transfer which results in power flow. This causes motion, or other phenomena that change in time. Example: Battery connected to resistor, inductor, and capacitor v Ri L di dt 1 C idt
5 Linear vs. Nonlinear Linear models follow the superposition principle The summation outputs from individual inputs will be equal to the output of the combined inputs Most systems are nonlinear in nature, but linear models can be used to approximate the nonlinear models at certain point.
6 Linear vs. Nonlinear Models Linear Systems Nonlinear Systems
7 Time-invariant vs. Time-variant The model parameters do not change in time-invariant models The model parameters change in time-variant models Example: Mass in rockets vary with time as the fuel is consumed. If the system parameters change with time, the system is time varying.
8 Time-invariant vs. variant Time-invariant F(t) = ma(t) g Time-variant F = m(t) a(t) g Where m is the mass, a is the acceleration, and g is the gravity Here, the mass varies with time. Therefore the model is time-varying
9 Linear Time-Invariant (LTI) LTI models are of great use in representing systems in many engineering applications. The appeal is its simplicity and mathematical structure. Although most actual systems are nonlinear and time varying Linear models are used to approximate around an operating point the nonlinear behavior Time-invariant models are used to approximate in short segments the system s time-varying behavior.
10 SISO vs. MIMO Single-Input Single-Output (SISO) models are somewhat easy to use. Transfer functions can be used to relate input to output. Multiple-Input Multiple-Output (MIMO) models involve combinations of inputs and outputs and are difficult to represent using transfer functions. MIMO models use State-Space equations
11 System States Transfer functions Concentrates on the input-output relationship only. Relates output-input to one-output only SISO It hides the details of the inner workings. State-Space Models States are introduced to get better insight into the systems behavior. These states are a collection of variables that summarize the present and past of a system Models can be used for MIMO models
12 SISO vs. MIMO Systems U(t) Transfer Function Y(t)
13 Continuous vs. discrete Continuous models have continuous-time as the dependent variable and therefore inputs-outputs take all possible values in a range Discrete models have discrete-time as the dependent variable and therefore inputs-outputs take on values at specified times only in a range
14 Continuous vs. discrete Continuous Models Discrete Models Differential equations Integration Laplace transforms Difference equations Summation Z-transforms
15 Deterministic vs. Stochastic Deterministic models are uniquely described by mathematical equations. Therefore, all past, present, and future values of the outputs are known precisely Stochastic models cannot be described mathematically with a high degree of accuracy. These models are based on the theory of probability
16 Block Diagrams Block diagram models consist of two fundamental objects: signal blocks and wires. A block is a processing element which operates on input signals and parameters to produce output signals A wire is to transmits a signal from its origination point (usually a block) to its termination point (usually another block). Block diagrams are suitable to represent multidisciplinary models that represent a physical phenomenon. Dr. Tarek A. Tutunji
17 Block Diagram Example [Ref.] Prof. Shetty
18 Block Diagrams Manipulation
19 Block Diagrams Manipulation
20 Block Diagrams: Direct Method Example Consider the transfer function: We can introduce s state variable, x(t), in order to separate the polynomials
21 State Equation The differential equation is: Put the needed integrator blocks: Add the required multipliers to obtain the state equation:
22 Output Equation Repeat the same procedure for the output equation: Connect the two sub-blocks
23 Block Diagram Modeling: Analogy Approach Physical laws are used to predict the behavior (both static and dynamic) of systems. Electrical engineering relies on Ohm s and Kirchoff s laws Mechanical engineering on Newton s law Electromagnetics on Faradays and Lenz s laws Fluids on continuity and Bernoulli s law Based on electrical analogies, we can derive the fundamental equations of systems in five disciplines of engineering: Electrical, Mechanical, Electromagnetic, Fluid, and Thermal. By using this analogy method to first derive the fundamental relationships in a system, the equations then can be represented in block diagram form, allowing secondary and nonlinear effects to be added. This two-step approach is especially useful when modeling large coupled systems using block diagrams.
24 Power and Energy Variables: Effort & Flow [Ref.] Raul Longoria
25 Transitional Mechanical Systems Mechanical movements in a straight line (i.e. linear motion) are called transitional Force displacement Basic Blocks are: Dampers, Masses, and Springs Springs represent the stiffness of the system F kx Dampers (or dashpots) represent the forces opposing to the motion (i.e. friction) F cv velocity Masses represent the inertia F ma mass acceleration Dr. Tarek A. Tutunji
26 Transitional Mechanical Systems Equations for mechanical systems are based on Newton Laws Free body diagram Spring Mass Force Damper ma F - kx - c dx dt Dr. Tarek A. Tutunji
27 Example: Mass-Spring-Damper Note: D is Differentiation 1/D is Integration
28 Example: Two-Mass Mechanical System [Ref.] Prof. Shetty
29 Example: Two-Mass Mechanical System
30 Example: Mechanical Model Consider a two carriage train system x1 x2 Force Mass 1 k(x1-x2) k(x1-x2) Mass 2 c v1 m m 1 2 x x 1 2 f - k(x k(x x 2 x2 ) - cx ) - cx 2 1 c v2
31 Example continued Taking the Laplace transform of the equations gives m s m 1 2 s 2 2 X X 1 2 (s) (s) F(s) - k(x k(x 1 (s) - 1 (s) - X 2 X 2 (s)) (s)) - csx - csx 2 (s) 1 (s) Note: Laplace transforms the time domain problem into s-domain (i.e. frequency) L L x(t) X(s) x(t) sx(s) 0 e st x(t)dt
32 Example continued Manipulating the previous two equations, gives the following transfer function (with F as input and V1 as output) V 1 (s) F(s) m m 1 2 s 3 c m s cs k 2 2 m m s km km c s 2kc Note: Transfer function is a frequency domain equation that gives the relationship between a specific input to a specific output
33 Example continued Simulation using MATLAB m1= 5; m2=0.7; k=0.8; c=0.05; num=[m2 c k]; den=[m1*m2 c*m1+c*m2 k*m1+k*m2+c*c 2*k*c]; sys=tf(num,den); % constructs the transfer function impulse(sys); % plots the impulse response step(sys); % plots the step response bode(sys); % plots the Bode plot
34 Example continued: Impulse response Dr. Tarek A. Tutunji
35 Example continued: Step response Dr. Tarek A. Tutunji

36 Dr. Tarek A. Tutunji Example continued: Bode Plot

37 Example: Motion of Aircraft
38 Rotational Mechanical Systems Consider a mechanical system that involves rotation Torque, T w dq/dt q T Shaft Side View J dw/dt kq cw The torque, T, replaces the force, F The angle, q, replaces the displacement x The angular velocity, w, replaces velocity v The angular acceleration, a, replaces the acceleration a The moment of inertia J, replaces the mass m Dr. Tarek A. Tutunji Top View
39 Rotational Mechanical Systems The mechanics equation becomes spring coefficient angle damper coefficient angular velocity moment of inertia angular acceleration Torque Dr. Tarek A. Tutunji T kθ cω Jα dθ T kθ c J dt d 2 dt θ 2

40 Example: Rotational-Transitional System Consider a rack-and-pinion system. The rotational motion of the pinion is transformed into transitional motion of the rack w T in pinion r v F rack For simplicity, the spring effects are ignored dω Tin Tout J c1ω dt Dr. Tarek A. Tutunji
41 Example continued The rotational equation is dω Tin Tout J c1ω dt The transitional equation is F c2v m dv dt Using the equations T out rf And manipulating the rotational and transitional equations with the input torque, Tin, as inputs and velocity, v, as output, we get ω v/r c T 1 in c r r 2 v J r mr dv dt Dr. Tarek A. Tutunji
42 Example continued Let us take a look at the state space equations In general, where x is the states vector, y is the output vector, and u is the input vector x y Ax Bx Cu Du In our example, we will dω use the states: w and v, dv dt the inputs: T in and F dt the output: v v 0 Manipulating the equations in the previous slide, we get c1 J 0 ω v 1 c 0 2 ω v m 1 J 0 r J T 1 F m in
43 Conversion: Transitional and Rotational
44 Gear Trains
45 where Gear Trains
46 Electrical Systems: Basic Equations Resistor Ohm s Law Voltage V Ri current Inductor V L di dt Resistance Capacitor Power = Voltage x Current Inductance V i 1 idt C dv C dt Capacitance Dr. Tarek A. Tutunji
47 Kirchoff Laws Equations for electrical systems are based on Kirchoff s Laws 1. Kirchoff current law: Sum of Input currents at node = Sum of output currents 2. Kirchoff voltage law: Summation of voltage in closed loop equals zero
48 Example: RLC circuit R i L C V V R - + V L - + V c - Using Kirchoff voltage law V Ri L di dt 1 C idt Or V Ri L di dt V c since i C dv dt c Then V RC dv dt c LC d 2 Vc 2 dt V A second order differential equation c
49 RLC MATLAB Code R= ; % R = 1MW L=0.001; % L=1 mh C= ; % C= 1mF num=1; den=[l*c R*C 1]; sys=tf(num,den); bode(sys) Impulse(sys) Step(sys)
50 RLC Simulation: Bode Plot At DC (i.e. frequency = 0), Capacitor is open => Voltage gain is 0dB (i.e. 1 V/V) At high frequency, Capacitor is short => Voltage = 0 Dr. Tarek A. Tutunji
51 RLC Simulation: Impulse Response Input voltage is pulse => Capacitor stores energy And then releases the energy Dr. Tarek A. Tutunji
52 RLC Simulation: Step Response At about 2.3 seconds, the capacitor Voltage becomes 90% of the 1 Volts Dr. Tarek A. Tutunji
53 Op Amps
54 PM-DC Motor Modeling R i L V in + - Motor T w The electrical equation is V in Ri L di dt V emf where V emf (Back electromagnetic voltage) = k 1 w dω The mechanical equation is T J bω Tload dt where T = k 2 i
55 DC Motor Model: Block Diagram T load V in i T + 1/(Ls+R) + - k 2-1/(Js+b) w k 1
56 Simulation Result
57 Fluid Systems Fluid systems can be divided into two categories: Hydraulic: fluid is a liquid and incompressible Pneumatic: fluid is gas and can be compressed The volumetric rate of flow, q, is equivalent to the current The pressure difference, P 1 -P 2, is equivalent to voltage The basic building blocks for hydraulic systems are: Hydraulic resistance, capacitance, and inertance
58 Hydraulic resistance Hydraulic resistance is the resistance to the fluid flow which occurs as a result of valves or pipe diameter changes The relationship between the volume rate of flow, q, and pressure difference, p 1 -p 2,is given by Ohm s law p p2 1 Rq p 1 p 2 p 1 p 2 pipe valve
59 Hydraulic Capacitance Potential energy stored in a liquid such as height of a liquid in a container q 1 p 1 h A p 2 q 2 Volume Change Volumetric rate of change q V 1 q 2 Ah Cross sectional Area dv dt q 1 q 2 dh A dt height
60 Hydraulic Capacitance p 2 1 p p hgρ density pressure height gravity Note that p F / A mg / A p Vg / A p hg dh q q2 A q1 - q2 dt d p gρ A dt 1 A gρ dp dt By letting the hydraulic capacitance be We get q q2 1 C dp dt C A gρ
61 Hydraulic Inertance Equivalent to inductance in electrical systems To accelerate a fluid and increase its velocity a force is required F 1 F2 p1 p2 Cross sectional Area F mass 1 = p 1 A Length using F 2 = p 2 A Then p p2 1 F1 F2 m ALρ q Av dq I dt dv ma m dt A Where the Inertance is Lρ I A
62 Hydraulic Example Modeling: an interactive 2-tank system q in (t) A 2 h 1 (t) A 1 R 1 q h 2 (t) 1 (t) dh dt dh dt q (t) q (t) q q h h in (t) q (t) q (t)/r (t) h 2 (t) (t) (t) /A /A /R R 2 q 2 (t)
63 Hydraulic Example Modeling: Block Diagram Input: q in 1/A 1 - dh1 h h /dt 1 2 Sum Integrate Sum 1/R 1 1/A 2 Sum Integrate - - q 1 1/A 1 1/A 2 1/R 2 Dr. Tarek A. Tutunji Output: q 2
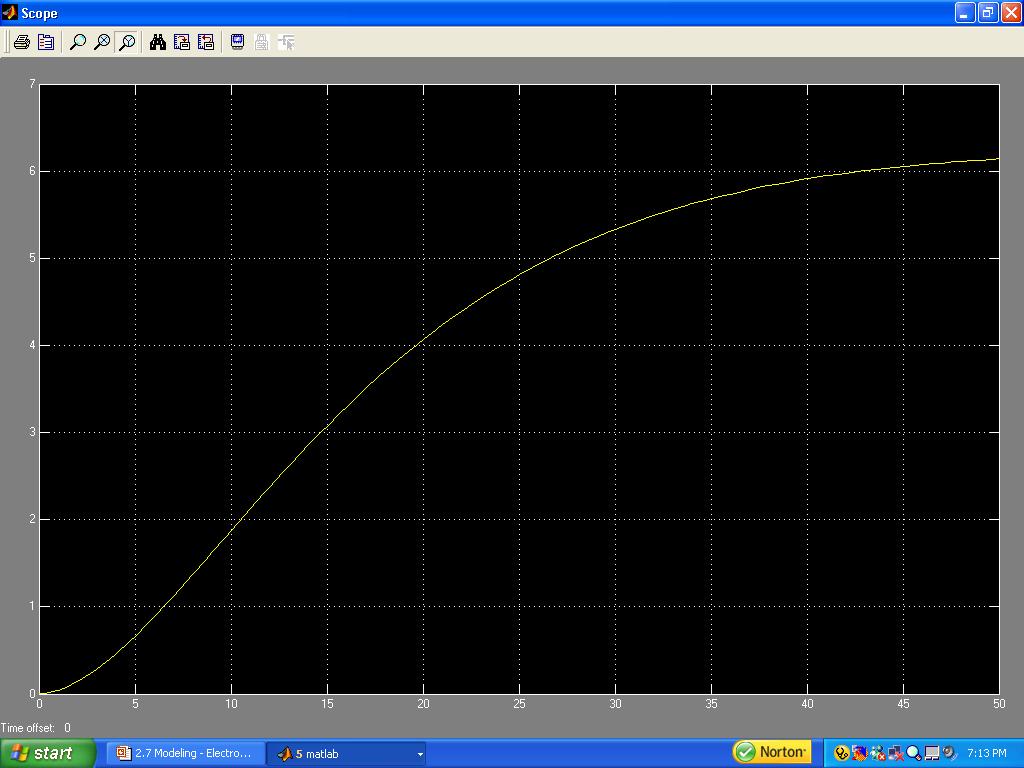
64 Hydraulic Example: Simulation Input, q in, is a step Output, q 2, is taken to a virtual scope Here, we assume all the Cross sectional areas and the resistances equals 1

65 Hydraulic Example: Simulation
66 Another Form of Analogies Potential and Flow Variables When systems are in motion, the energy can be Increased by an energy-producing source outside the system Redistributed between components within the system Decreased by energy loss through components out of the system. Therefore, a coupled system becomes synonymous with energy transfer between systems. Potential Variable = PV Flow Variable = FV
67 Analogies: FV and PV Flow Variable (FV) Potential Variable (PV) Electrical Current Voltage Mechanical Transitional Force Velocity Mechanical Rotational Torque Angular Velocity Hydraulic Volumetric Flow Rate Pressure Pneumatic Mass Flow Rate Pressure Thermal Heat Flow Rate Temperature
68 Which Analogies to use? Force-Voltage makes more physical sense Graphical Representation: Bond Graphs Force-Current makes mathematical sense Sum of Currents= Zero and Sum of Forces = Zero Graphical Representation: Linear Graphs
69 Conclusion Mathematical Modeling of physical systems is an essential step in the design process Simulation should follow the modeling in order to investigate the system response Mechatronic systems involve different disciplines and therefore an appropriate modeling technique to use is block diagrams Analogies among disciplines can be used to simplify the understanding of different dynamic behaviors Dr. Tarek A. Tutunji
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems
 Electrical, Mechanical and Thermal Systems") ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
AP Physics C Mechanics Objectives
 AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright Diane L. Peters, Ph.D., P.E.
 Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright 2015 Diane L. Peters, Ph.D., P.E. Spring 2015 2 Contents 1 Overview of Dynamic Modeling 5 2 Bond Graph Basics 7 2.1 Causality.............................
Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright 2015 Diane L. Peters, Ph.D., P.E. Spring 2015 2 Contents 1 Overview of Dynamic Modeling 5 2 Bond Graph Basics 7 2.1 Causality.............................
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Mechatronics 1: ME 392Q-6 & 348C 31-Aug-07 M.D. Bryant. Analogous Systems. e(t) Se: e. ef = p/i. q = p /I, p = " q C " R p I + e(t)
 Se: e. ef = p/i. q = p /I, p = q C R p I + e(t)") V + - K R + - - k b V R V L L J + V C M B Analogous Systems i = q. + ω = θ. C -. λ/l = q v = x F T. Se: e e(t) e = p/i R: R 1 I: I e C = q/c C = dq/dt e I = dp/dt Identical dierential equations & bond
V + - K R + - - k b V R V L L J + V C M B Analogous Systems i = q. + ω = θ. C -. λ/l = q v = x F T. Se: e e(t) e = p/i R: R 1 I: I e C = q/c C = dq/dt e I = dp/dt Identical dierential equations & bond
Linear Systems Theory
 ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Signals u(t) = 1 when t 0 = 0 when t <0
 (ME-II Yr) UNIT-3 Content: Signals u(t) = 1 when t 0 = 0 when t <0") Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Modeling of Mechanical : linear mechanical elements, force-voltage and force current analogy, and electrical analog of simple
Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Modeling of Mechanical : linear mechanical elements, force-voltage and force current analogy, and electrical analog of simple
Solved Problems. Electric Circuits & Components. 1-1 Write the KVL equation for the circuit shown.
 Solved Problems Electric Circuits & Components 1-1 Write the KVL equation for the circuit shown. 1-2 Write the KCL equation for the principal node shown. 1-2A In the DC circuit given in Fig. 1, find (i)
Solved Problems Electric Circuits & Components 1-1 Write the KVL equation for the circuit shown. 1-2 Write the KCL equation for the principal node shown. 1-2A In the DC circuit given in Fig. 1, find (i)
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
Chapter three. Mathematical Modeling of mechanical end electrical systems. Laith Batarseh
 Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
School of Engineering Faculty of Built Environment, Engineering, Technology & Design
 Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Here are some internet links to instructional and necessary background materials:
 The general areas covered by the University Physics course are subdivided into major categories. For each category, answer the conceptual questions in the form of a short paragraph. Although fewer topics
The general areas covered by the University Physics course are subdivided into major categories. For each category, answer the conceptual questions in the form of a short paragraph. Although fewer topics
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
Physics for Scientists & Engineers 2
 Electromagnetic Oscillations Physics for Scientists & Engineers Spring Semester 005 Lecture 8! We have been working with circuits that have a constant current a current that increases to a constant current
Electromagnetic Oscillations Physics for Scientists & Engineers Spring Semester 005 Lecture 8! We have been working with circuits that have a constant current a current that increases to a constant current
Introduction to Controls
 EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
Noise - irrelevant data; variability in a quantity that has no meaning or significance. In most cases this is modeled as a random variable.
 1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
System Modeling. Lecture-2. Emam Fathy Department of Electrical and Control Engineering
 System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
MATHEMATICAL MODELING OF DYNAMIC SYSTEMS
 MTHEMTIL MODELIN OF DYNMI SYSTEMS Mechanical Translational System 1. Spring x(t) k F S (t) k x(t) x i (t) k x o (t) 2. Damper x(t) x i (t) x o (t) c c 3. Mass x(t) F(t) m EXMPLE I Produce the block diagram
MTHEMTIL MODELIN OF DYNMI SYSTEMS Mechanical Translational System 1. Spring x(t) k F S (t) k x(t) x i (t) k x o (t) 2. Damper x(t) x i (t) x o (t) c c 3. Mass x(t) F(t) m EXMPLE I Produce the block diagram
Lecture 1. Electrical Transport
 Lecture 1. Electrical Transport 1.1 Introduction * Objectives * Requirements & Grading Policy * Other information 1.2 Basic Circuit Concepts * Electrical l quantities current, voltage & power, sign conventions
Lecture 1. Electrical Transport 1.1 Introduction * Objectives * Requirements & Grading Policy * Other information 1.2 Basic Circuit Concepts * Electrical l quantities current, voltage & power, sign conventions
Basic Electronics. Introductory Lecture Course for. Technology and Instrumentation in Particle Physics Chicago, Illinois June 9-14, 2011
 Basic Electronics Introductory Lecture Course for Technology and Instrumentation in Particle Physics 2011 Chicago, Illinois June 9-14, 2011 Presented By Gary Drake Argonne National Laboratory drake@anl.gov
Basic Electronics Introductory Lecture Course for Technology and Instrumentation in Particle Physics 2011 Chicago, Illinois June 9-14, 2011 Presented By Gary Drake Argonne National Laboratory drake@anl.gov
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
ECE2262 Electric Circuits. Chapter 6: Capacitance and Inductance
 ECE2262 Electric Circuits Chapter 6: Capacitance and Inductance Capacitors Inductors Capacitor and Inductor Combinations Op-Amp Integrator and Op-Amp Differentiator 1 CAPACITANCE AND INDUCTANCE Introduces
ECE2262 Electric Circuits Chapter 6: Capacitance and Inductance Capacitors Inductors Capacitor and Inductor Combinations Op-Amp Integrator and Op-Amp Differentiator 1 CAPACITANCE AND INDUCTANCE Introduces
Solving a RLC Circuit using Convolution with DERIVE for Windows
 Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
Springs and Dampers. MCE371: Vibrations. Prof. Richter. Department of Mechanical Engineering. Handout 2 Fall 2017
 MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 2 Fall 2017 Spring Law : One End Fixed Ideal linear spring law: f = kx. What are the units of k? More generally: f = F(x) nonlinear
MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 2 Fall 2017 Spring Law : One End Fixed Ideal linear spring law: f = kx. What are the units of k? More generally: f = F(x) nonlinear
Inductance, RL and RLC Circuits
 Inductance, RL and RLC Circuits Inductance Temporarily storage of energy by the magnetic field When the switch is closed, the current does not immediately reach its maximum value. Faraday s law of electromagnetic
Inductance, RL and RLC Circuits Inductance Temporarily storage of energy by the magnetic field When the switch is closed, the current does not immediately reach its maximum value. Faraday s law of electromagnetic
Ch. 23 Electromagnetic Induction, AC Circuits, And Electrical Technologies
 Ch. 23 Electromagnetic Induction, AC Circuits, And Electrical Technologies Induced emf - Faraday s Experiment When a magnet moves toward a loop of wire, the ammeter shows the presence of a current When
Ch. 23 Electromagnetic Induction, AC Circuits, And Electrical Technologies Induced emf - Faraday s Experiment When a magnet moves toward a loop of wire, the ammeter shows the presence of a current When
Inductance, Inductors, RL Circuits & RC Circuits, LC, and RLC Circuits
 Inductance, Inductors, RL Circuits & RC Circuits, LC, and RLC Circuits Self-inductance A time-varying current in a circuit produces an induced emf opposing the emf that initially set up the timevarying
Inductance, Inductors, RL Circuits & RC Circuits, LC, and RLC Circuits Self-inductance A time-varying current in a circuit produces an induced emf opposing the emf that initially set up the timevarying
Automatic Control Systems. -Lecture Note 15-
 -Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
-Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
Mixing Problems. Solution of concentration c 1 grams/liter flows in at a rate of r 1 liters/minute. Figure 1.7.1: A mixing problem.
 page 57 1.7 Modeling Problems Using First-Order Linear Differential Equations 57 For Problems 33 38, use a differential equation solver to determine the solution to each of the initial-value problems and
page 57 1.7 Modeling Problems Using First-Order Linear Differential Equations 57 For Problems 33 38, use a differential equation solver to determine the solution to each of the initial-value problems and
AC vs. DC Circuits. Constant voltage circuits. The voltage from an outlet is alternating voltage
 Circuits AC vs. DC Circuits Constant voltage circuits Typically referred to as direct current or DC Computers, logic circuits, and battery operated devices are examples of DC circuits The voltage from
Circuits AC vs. DC Circuits Constant voltage circuits Typically referred to as direct current or DC Computers, logic circuits, and battery operated devices are examples of DC circuits The voltage from
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Version 001 CIRCUITS holland (1290) 1
 1") Version CIRCUITS holland (9) This print-out should have questions Multiple-choice questions may continue on the next column or page find all choices before answering AP M 99 MC points The power dissipated
Version CIRCUITS holland (9) This print-out should have questions Multiple-choice questions may continue on the next column or page find all choices before answering AP M 99 MC points The power dissipated
Electromagnetic Induction (Chapters 31-32)
") Electromagnetic Induction (Chapters 31-3) The laws of emf induction: Faraday s and Lenz s laws Inductance Mutual inductance M Self inductance L. Inductors Magnetic field energy Simple inductive circuits
Electromagnetic Induction (Chapters 31-3) The laws of emf induction: Faraday s and Lenz s laws Inductance Mutual inductance M Self inductance L. Inductors Magnetic field energy Simple inductive circuits
ELECTROMAGNETIC OSCILLATIONS AND ALTERNATING CURRENT
 Chapter 31: ELECTROMAGNETIC OSCILLATIONS AND ALTERNATING CURRENT 1 A charged capacitor and an inductor are connected in series At time t = 0 the current is zero, but the capacitor is charged If T is the
Chapter 31: ELECTROMAGNETIC OSCILLATIONS AND ALTERNATING CURRENT 1 A charged capacitor and an inductor are connected in series At time t = 0 the current is zero, but the capacitor is charged If T is the
Analog Signals and Systems and their properties
 Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Gen. Phys. II Exam 2 - Chs. 21,22,23 - Circuits, Magnetism, EM Induction Mar. 5, 2018
 Gen. Phys. II Exam 2 - Chs. 21,22,23 - Circuits, Magnetism, EM Induction Mar. 5, 2018 Rec. Time Name For full credit, make your work clear. Show formulas used, essential steps, and results with correct
Gen. Phys. II Exam 2 - Chs. 21,22,23 - Circuits, Magnetism, EM Induction Mar. 5, 2018 Rec. Time Name For full credit, make your work clear. Show formulas used, essential steps, and results with correct
Solution for Fq. A. up B. down C. east D. west E. south
 Solution for Fq A proton traveling due north enters a region that contains both a magnetic field and an electric field. The electric field lines point due west. It is observed that the proton continues
Solution for Fq A proton traveling due north enters a region that contains both a magnetic field and an electric field. The electric field lines point due west. It is observed that the proton continues
SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER 1 EXAMINATIONS 2012/2013 XE121. ENGINEERING CONCEPTS (Test)
") s SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER EXAMINATIONS 202/203 XE2 ENGINEERING CONCEPTS (Test) Time allowed: TWO hours Answer: Attempt FOUR questions only, a maximum of TWO questions
s SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER EXAMINATIONS 202/203 XE2 ENGINEERING CONCEPTS (Test) Time allowed: TWO hours Answer: Attempt FOUR questions only, a maximum of TWO questions
Introduction to AC Circuits (Capacitors and Inductors)
") Introduction to AC Circuits (Capacitors and Inductors) Amin Electronics and Electrical Communications Engineering Department (EECE) Cairo University elc.n102.eng@gmail.com http://scholar.cu.edu.eg/refky/
Introduction to AC Circuits (Capacitors and Inductors) Amin Electronics and Electrical Communications Engineering Department (EECE) Cairo University elc.n102.eng@gmail.com http://scholar.cu.edu.eg/refky/
ECE2262 Electric Circuits. Chapter 6: Capacitance and Inductance
 ECE2262 Electric Circuits Chapter 6: Capacitance and Inductance Capacitors Inductors Capacitor and Inductor Combinations 1 CAPACITANCE AND INDUCTANCE Introduces two passive, energy storing devices: Capacitors
ECE2262 Electric Circuits Chapter 6: Capacitance and Inductance Capacitors Inductors Capacitor and Inductor Combinations 1 CAPACITANCE AND INDUCTANCE Introduces two passive, energy storing devices: Capacitors
Chapter 8. Model of the Accelerometer. 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation
 Chapter 8. Model of the Accelerometer 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation 8.3 Sensor System Simulation In order to predict the behavior of the mechanical sensor in combination
Chapter 8. Model of the Accelerometer 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation 8.3 Sensor System Simulation In order to predict the behavior of the mechanical sensor in combination
Chapter 32. Inductance
 Chapter 32 Inductance Joseph Henry 1797 1878 American physicist First director of the Smithsonian Improved design of electromagnet Constructed one of the first motors Discovered self-inductance Unit of
Chapter 32 Inductance Joseph Henry 1797 1878 American physicist First director of the Smithsonian Improved design of electromagnet Constructed one of the first motors Discovered self-inductance Unit of
Physics Will Farmer. May 5, Physics 1120 Contents 2
 Physics 1120 Will Farmer May 5, 2013 Contents Physics 1120 Contents 2 1 Charges 3 1.1 Terms................................................... 3 1.2 Electric Charge..............................................
Physics 1120 Will Farmer May 5, 2013 Contents Physics 1120 Contents 2 1 Charges 3 1.1 Terms................................................... 3 1.2 Electric Charge..............................................
MATH 312 Section 3.1: Linear Models
 MATH 312 Section 3.1: Linear Models Prof. Jonathan Duncan Walla Walla College Spring Quarter, 2007 Outline 1 Population Growth 2 Newton s Law of Cooling 3 Kepler s Law Second Law of Planetary Motion 4
MATH 312 Section 3.1: Linear Models Prof. Jonathan Duncan Walla Walla College Spring Quarter, 2007 Outline 1 Population Growth 2 Newton s Law of Cooling 3 Kepler s Law Second Law of Planetary Motion 4
Solutions to PHY2049 Exam 2 (Nov. 3, 2017)
") Solutions to PHY2049 Exam 2 (Nov. 3, 207) Problem : In figure a, both batteries have emf E =.2 V and the external resistance R is a variable resistor. Figure b gives the electric potentials V between the
Solutions to PHY2049 Exam 2 (Nov. 3, 207) Problem : In figure a, both batteries have emf E =.2 V and the external resistance R is a variable resistor. Figure b gives the electric potentials V between the
b) (4) How large is the current through the 2.00 Ω resistor, and in which direction?
 (4) How large is the current through the 2.00 Ω resistor, and in which direction?") General Physics II Exam 2 - Chs. 19 21 - Circuits, Magnetism, EM Induction - Sep. 29, 2016 Name Rec. Instr. Rec. Time For full credit, make your work clear. Show formulas used, essential steps, and results
General Physics II Exam 2 - Chs. 19 21 - Circuits, Magnetism, EM Induction - Sep. 29, 2016 Name Rec. Instr. Rec. Time For full credit, make your work clear. Show formulas used, essential steps, and results
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
Self-inductance A time-varying current in a circuit produces an induced emf opposing the emf that initially set up the time-varying current.
 Inductance Self-inductance A time-varying current in a circuit produces an induced emf opposing the emf that initially set up the time-varying current. Basis of the electrical circuit element called an
Inductance Self-inductance A time-varying current in a circuit produces an induced emf opposing the emf that initially set up the time-varying current. Basis of the electrical circuit element called an
r where the electric constant
 1.0 ELECTROSTATICS At the end of this topic, students will be able to: 10 1.1 Coulomb s law a) Explain the concepts of electrons, protons, charged objects, charged up, gaining charge, losing charge, charging
1.0 ELECTROSTATICS At the end of this topic, students will be able to: 10 1.1 Coulomb s law a) Explain the concepts of electrons, protons, charged objects, charged up, gaining charge, losing charge, charging
Slide 1 / 26. Inductance by Bryan Pflueger
 Slide 1 / 26 Inductance 2011 by Bryan Pflueger Slide 2 / 26 Mutual Inductance If two coils of wire are placed near each other and have a current passing through them, they will each induce an emf on one
Slide 1 / 26 Inductance 2011 by Bryan Pflueger Slide 2 / 26 Mutual Inductance If two coils of wire are placed near each other and have a current passing through them, they will each induce an emf on one
Exercise 5 - Hydraulic Turbines and Electromagnetic Systems
 Exercise 5 - Hydraulic Turbines and Electromagnetic Systems 5.1 Hydraulic Turbines Whole courses are dedicated to the analysis of gas turbines. For the aim of modeling hydraulic systems, we analyze here
Exercise 5 - Hydraulic Turbines and Electromagnetic Systems 5.1 Hydraulic Turbines Whole courses are dedicated to the analysis of gas turbines. For the aim of modeling hydraulic systems, we analyze here
Mechatronics Engineering. Li Wen
 Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Chapter 6. Second order differential equations
 Chapter 6. Second order differential equations A second order differential equation is of the form y = f(t, y, y ) where y = y(t). We shall often think of t as parametrizing time, y position. In this case
Chapter 6. Second order differential equations A second order differential equation is of the form y = f(t, y, y ) where y = y(t). We shall often think of t as parametrizing time, y position. In this case
ENGG4420 LECTURE 7. CHAPTER 1 BY RADU MURESAN Page 1. September :29 PM
 CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
In the presence of viscous damping, a more generalized form of the Lagrange s equation of motion can be written as
 2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
SUMMARY Phys 2523 (University Physics II) Compiled by Prof. Erickson. F e (r )=q E(r ) dq r 2 ˆr = k e E = V. V (r )=k e r = k q i. r i r.
 Compiled by Prof. Erickson. F e (r )=q E(r ) dq r 2 ˆr = k e E = V. V (r )=k e r = k q i. r i r.") SUMMARY Phys 53 (University Physics II) Compiled by Prof. Erickson q 1 q Coulomb s Law: F 1 = k e r ˆr where k e = 1 4π =8.9875 10 9 N m /C, and =8.85 10 1 C /(N m )isthepermittivity of free space. Generally,
SUMMARY Phys 53 (University Physics II) Compiled by Prof. Erickson q 1 q Coulomb s Law: F 1 = k e r ˆr where k e = 1 4π =8.9875 10 9 N m /C, and =8.85 10 1 C /(N m )isthepermittivity of free space. Generally,
Energy Storage Elements: Capacitors and Inductors
 CHAPTER 6 Energy Storage Elements: Capacitors and Inductors To this point in our study of electronic circuits, time has not been important. The analysis and designs we have performed so far have been static,
CHAPTER 6 Energy Storage Elements: Capacitors and Inductors To this point in our study of electronic circuits, time has not been important. The analysis and designs we have performed so far have been static,
Louisiana State University Physics 2102, Exam 3 April 2nd, 2009.
 PRINT Your Name: Instructor: Louisiana State University Physics 2102, Exam 3 April 2nd, 2009. Please be sure to PRINT your name and class instructor above. The test consists of 4 questions (multiple choice),
PRINT Your Name: Instructor: Louisiana State University Physics 2102, Exam 3 April 2nd, 2009. Please be sure to PRINT your name and class instructor above. The test consists of 4 questions (multiple choice),
EE102 Homework 2, 3, and 4 Solutions
 EE12 Prof. S. Boyd EE12 Homework 2, 3, and 4 Solutions 7. Some convolution systems. Consider a convolution system, y(t) = + u(t τ)h(τ) dτ, where h is a function called the kernel or impulse response of
EE12 Prof. S. Boyd EE12 Homework 2, 3, and 4 Solutions 7. Some convolution systems. Consider a convolution system, y(t) = + u(t τ)h(τ) dτ, where h is a function called the kernel or impulse response of
Lecture A1 : Systems and system models
 Lecture A1 : Systems and system models Jan Swevers July 2006 Aim of this lecture : Understand the process of system modelling (different steps). Define the class of systems that will be considered in this
Lecture A1 : Systems and system models Jan Swevers July 2006 Aim of this lecture : Understand the process of system modelling (different steps). Define the class of systems that will be considered in this
Module 25: Outline Resonance & Resonance Driven & LRC Circuits Circuits 2
 Module 25: Driven RLC Circuits 1 Module 25: Outline Resonance & Driven LRC Circuits 2 Driven Oscillations: Resonance 3 Mass on a Spring: Simple Harmonic Motion A Second Look 4 Mass on a Spring (1) (2)
Module 25: Driven RLC Circuits 1 Module 25: Outline Resonance & Driven LRC Circuits 2 Driven Oscillations: Resonance 3 Mass on a Spring: Simple Harmonic Motion A Second Look 4 Mass on a Spring (1) (2)
Chapter 2. Engr228 Circuit Analysis. Dr Curtis Nelson
 Chapter 2 Engr228 Circuit Analysis Dr Curtis Nelson Chapter 2 Objectives Understand symbols and behavior of the following circuit elements: Independent voltage and current sources; Dependent voltage and
Chapter 2 Engr228 Circuit Analysis Dr Curtis Nelson Chapter 2 Objectives Understand symbols and behavior of the following circuit elements: Independent voltage and current sources; Dependent voltage and
Scanned by CamScanner
 Scanned by CamScanner Scanned by CamScanner t W I w v 6.00-fall 017 Midterm 1 Name Problem 3 (15 pts). F the circuit below, assume that all equivalent parameters are to be found to the left of port
Scanned by CamScanner Scanned by CamScanner t W I w v 6.00-fall 017 Midterm 1 Name Problem 3 (15 pts). F the circuit below, assume that all equivalent parameters are to be found to the left of port
SUBJECT & PEDAGOGICAL CONTENT STANDARDS FOR PHYSICS TEACHERS (GRADES 9-10)
") SUBJECT & PEDAGOGICAL CONTENT STANDARDS FOR PHYSICS TEACHERS (GRADES 9-10) JULY 2014 2 P a g e 1) Standard 1: Content Knowledge for Grade 9-10 Physics Teacher Understands Models and Scales G9-10PS1.E1.1)
SUBJECT & PEDAGOGICAL CONTENT STANDARDS FOR PHYSICS TEACHERS (GRADES 9-10) JULY 2014 2 P a g e 1) Standard 1: Content Knowledge for Grade 9-10 Physics Teacher Understands Models and Scales G9-10PS1.E1.1)
Physics For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight
 For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight To the Advanced Placement Topics for C *Advanced Placement, Advanced Placement Program, AP, and Pre-AP are registered
For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight To the Advanced Placement Topics for C *Advanced Placement, Advanced Placement Program, AP, and Pre-AP are registered
Assessment Schedule 2015 Physics: Demonstrate understanding of electrical systems (91526)
") NCEA Level 3 Physics (91526) 2015 page 1 of 6 Assessment Schedule 2015 Physics: Demonstrate understanding of electrical systems (91526) Evidence Q Evidence Achievement Achievement with Merit Achievement
NCEA Level 3 Physics (91526) 2015 page 1 of 6 Assessment Schedule 2015 Physics: Demonstrate understanding of electrical systems (91526) Evidence Q Evidence Achievement Achievement with Merit Achievement
TELLEGEN S THEOREM APPLIED TO MECHANICAL, FLUID AND THERMAL SYSTEMS
 Session 2793 TELLEGEN S THEOEM APPLIED TO MECHANICAL, LUID AND THEMAL SYSTEMS avi P. amachandran and V. amachandran 2. Department of Electrical and Computer Engineering, owan University, Glassboro, New
Session 2793 TELLEGEN S THEOEM APPLIED TO MECHANICAL, LUID AND THEMAL SYSTEMS avi P. amachandran and V. amachandran 2. Department of Electrical and Computer Engineering, owan University, Glassboro, New
Module 24: Outline. Expt. 8: Part 2:Undriven RLC Circuits
 Module 24: Undriven RLC Circuits 1 Module 24: Outline Undriven RLC Circuits Expt. 8: Part 2:Undriven RLC Circuits 2 Circuits that Oscillate (LRC) 3 Mass on a Spring: Simple Harmonic Motion (Demonstration)
Module 24: Undriven RLC Circuits 1 Module 24: Outline Undriven RLC Circuits Expt. 8: Part 2:Undriven RLC Circuits 2 Circuits that Oscillate (LRC) 3 Mass on a Spring: Simple Harmonic Motion (Demonstration)
1 2 U CV. K dq I dt J nqv d J V IR P VI
 o 5 o T C T F 3 9 T K T o C 73.5 L L T V VT Q mct nct Q F V ml F V dq A H k TH TC L pv nrt 3 Ktr nrt 3 CV R ideal monatomic gas 5 CV R ideal diatomic gas w/o vibration V W pdv V U Q W W Q e Q Q e Carnot
o 5 o T C T F 3 9 T K T o C 73.5 L L T V VT Q mct nct Q F V ml F V dq A H k TH TC L pv nrt 3 Ktr nrt 3 CV R ideal monatomic gas 5 CV R ideal diatomic gas w/o vibration V W pdv V U Q W W Q e Q Q e Carnot
ELECTRO MAGNETIC INDUCTION
 ELECTRO MAGNETIC INDUCTION 1) A Circular coil is placed near a current carrying conductor. The induced current is anti clock wise when the coil is, 1. Stationary 2. Moved away from the conductor 3. Moved
ELECTRO MAGNETIC INDUCTION 1) A Circular coil is placed near a current carrying conductor. The induced current is anti clock wise when the coil is, 1. Stationary 2. Moved away from the conductor 3. Moved
Review: control, feedback, etc. Today s topic: state-space models of systems; linearization
 Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Exam 3 Solutions. The induced EMF (magnitude) is given by Faraday s Law d dt dt The current is given by
 is given by Faraday s Law d dt dt The current is given by") PHY049 Spring 008 Prof. Darin Acosta Prof. Selman Hershfield April 9, 008. A metal rod is forced to move with constant velocity of 60 cm/s [or 90 cm/s] along two parallel metal rails, which are connected
PHY049 Spring 008 Prof. Darin Acosta Prof. Selman Hershfield April 9, 008. A metal rod is forced to move with constant velocity of 60 cm/s [or 90 cm/s] along two parallel metal rails, which are connected
PHYS General Physics for Engineering II FIRST MIDTERM
 Çankaya University Department of Mathematics and Computer Sciences 2010-2011 Spring Semester PHYS 112 - General Physics for Engineering II FIRST MIDTERM 1) Two fixed particles of charges q 1 = 1.0µC and
Çankaya University Department of Mathematics and Computer Sciences 2010-2011 Spring Semester PHYS 112 - General Physics for Engineering II FIRST MIDTERM 1) Two fixed particles of charges q 1 = 1.0µC and
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Physics for Scientists & Engineers 2
 Review The resistance R of a device is given by Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 8 R =! L A ρ is resistivity of the material from which the device is constructed L is the
Review The resistance R of a device is given by Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 8 R =! L A ρ is resistivity of the material from which the device is constructed L is the
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Physics 240 Fall 2005: Exam #3 Solutions. Please print your name: Please list your discussion section number: Please list your discussion instructor:
 Physics 4 Fall 5: Exam #3 Solutions Please print your name: Please list your discussion section number: Please list your discussion instructor: Form #1 Instructions 1. Fill in your name above. This will
Physics 4 Fall 5: Exam #3 Solutions Please print your name: Please list your discussion section number: Please list your discussion instructor: Form #1 Instructions 1. Fill in your name above. This will
2. The following diagram illustrates that voltage represents what physical dimension?
 BioE 1310 - Exam 1 2/20/2018 Answer Sheet - Correct answer is A for all questions 1. A particular voltage divider with 10 V across it consists of two resistors in series. One resistor is 7 KΩ and the other
BioE 1310 - Exam 1 2/20/2018 Answer Sheet - Correct answer is A for all questions 1. A particular voltage divider with 10 V across it consists of two resistors in series. One resistor is 7 KΩ and the other
Final on December Physics 106 R. Schad. 3e 4e 5c 6d 7c 8d 9b 10e 11d 12e 13d 14d 15b 16d 17b 18b 19c 20a
 Final on December11. 2007 - Physics 106 R. Schad YOUR NAME STUDENT NUMBER 3e 4e 5c 6d 7c 8d 9b 10e 11d 12e 13d 14d 15b 16d 17b 18b 19c 20a 1. 2. 3. 4. This is to identify the exam version you have IMPORTANT
Final on December11. 2007 - Physics 106 R. Schad YOUR NAME STUDENT NUMBER 3e 4e 5c 6d 7c 8d 9b 10e 11d 12e 13d 14d 15b 16d 17b 18b 19c 20a 1. 2. 3. 4. This is to identify the exam version you have IMPORTANT
CHAPTER FOUR MUTUAL INDUCTANCE
 CHAPTER FOUR MUTUAL INDUCTANCE 4.1 Inductance 4.2 Capacitance 4.3 Serial-Parallel Combination 4.4 Mutual Inductance 4.1 Inductance Inductance (L in Henry is the circuit parameter used to describe an inductor.
CHAPTER FOUR MUTUAL INDUCTANCE 4.1 Inductance 4.2 Capacitance 4.3 Serial-Parallel Combination 4.4 Mutual Inductance 4.1 Inductance Inductance (L in Henry is the circuit parameter used to describe an inductor.
2.004 Dynamics and Control II Spring 2008
 MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
2.5 Translational Mechanical System Transfer Functions 61. FIGURE 2.14 Electric circuit for Skill- Assessment Exercise 2.6
 .5 Translational echanical System Transfer Functions 1 1Ω 1H 1Ω + v(t) + 1 H 1 H v L (t) FIGURE.14 Electric circuit for Skill- Assessment Exercise. ANSWER: V L ðsþ=vðsþ ¼ðs þ s þ 1Þ=ðs þ 5s þ Þ The complete
.5 Translational echanical System Transfer Functions 1 1Ω 1H 1Ω + v(t) + 1 H 1 H v L (t) FIGURE.14 Electric circuit for Skill- Assessment Exercise. ANSWER: V L ðsþ=vðsþ ¼ðs þ s þ 1Þ=ðs þ 5s þ Þ The complete
The basic principle to be used in mechanical systems to derive a mathematical model is Newton s law,
 Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
Applications of Second-Order Differential Equations
 Applications of Second-Order Differential Equations ymy/013 Building Intuition Even though there are an infinite number of differential equations, they all share common characteristics that allow intuition
Applications of Second-Order Differential Equations ymy/013 Building Intuition Even though there are an infinite number of differential equations, they all share common characteristics that allow intuition
Handout 10: Inductance. Self-Inductance and inductors
 1 Handout 10: Inductance Self-Inductance and inductors In Fig. 1, electric current is present in an isolate circuit, setting up magnetic field that causes a magnetic flux through the circuit itself. This
1 Handout 10: Inductance Self-Inductance and inductors In Fig. 1, electric current is present in an isolate circuit, setting up magnetic field that causes a magnetic flux through the circuit itself. This
Where k = 1. The electric field produced by a point charge is given by
 Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
Alternating Current. Symbol for A.C. source. A.C.
 Alternating Current Kirchoff s rules for loops and junctions may be used to analyze complicated circuits such as the one below, powered by an alternating current (A.C.) source. But the analysis can quickly
Alternating Current Kirchoff s rules for loops and junctions may be used to analyze complicated circuits such as the one below, powered by an alternating current (A.C.) source. But the analysis can quickly
Differential Equations Spring 2007 Assignments
 Differential Equations Spring 2007 Assignments Homework 1, due 1/10/7 Read the first two chapters of the book up to the end of section 2.4. Prepare for the first quiz on Friday 10th January (material up
Differential Equations Spring 2007 Assignments Homework 1, due 1/10/7 Read the first two chapters of the book up to the end of section 2.4. Prepare for the first quiz on Friday 10th January (material up
Solution to Homework 2
 Solution to Homework. Substitution and Nonexact Differential Equation Made Exact) [0] Solve dy dx = ey + 3e x+y, y0) = 0. Let u := e x, v = e y, and hence dy = v + 3uv) dx, du = u)dx, dv = v)dy = u)dv
Solution to Homework. Substitution and Nonexact Differential Equation Made Exact) [0] Solve dy dx = ey + 3e x+y, y0) = 0. Let u := e x, v = e y, and hence dy = v + 3uv) dx, du = u)dx, dv = v)dy = u)dv
Model of a DC Generator Driving a DC Motor (which propels a car)
") Model of a DC Generator Driving a DC Motor (which propels a car) John Hung 5 July 2011 The dc is connected to the dc as illustrated in Fig. 1. Both machines are of permanent magnet type, so their respective
Model of a DC Generator Driving a DC Motor (which propels a car) John Hung 5 July 2011 The dc is connected to the dc as illustrated in Fig. 1. Both machines are of permanent magnet type, so their respective
10/11/2018 1:48 PM Approved (Changed Course) PHYS 42 Course Outline as of Fall 2017
 PHYS 42 Course Outline as of Fall 2017") 10/11/2018 1:48 PM Approved (Changed Course) PHYS 42 Course Outline as of Fall 2017 CATALOG INFORMATION Dept and Nbr: PHYS 42 Title: ELECTRICITY & MAGNETISM Full Title: Electricity and Magnetism for Scientists
10/11/2018 1:48 PM Approved (Changed Course) PHYS 42 Course Outline as of Fall 2017 CATALOG INFORMATION Dept and Nbr: PHYS 42 Title: ELECTRICITY & MAGNETISM Full Title: Electricity and Magnetism for Scientists
Oscillations. Tacoma Narrow Bridge: Example of Torsional Oscillation
 Oscillations Mechanical Mass-spring system nd order differential eq. Energy tossing between mass (kinetic energy) and spring (potential energy) Effect of friction, critical damping (shock absorber) Simple
Oscillations Mechanical Mass-spring system nd order differential eq. Energy tossing between mass (kinetic energy) and spring (potential energy) Effect of friction, critical damping (shock absorber) Simple
General Response of Second Order System
 General Response of Second Order System Slide 1 Learning Objectives Learn to analyze a general second order system and to obtain the general solution Identify the over-damped, under-damped, and critically
General Response of Second Order System Slide 1 Learning Objectives Learn to analyze a general second order system and to obtain the general solution Identify the over-damped, under-damped, and critically
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
a + b Time Domain i(τ)dτ.
dτ.") R, C, and L Elements and their v and i relationships We deal with three essential elements in circuit analysis: Resistance R Capacitance C Inductance L Their v and i relationships are summarized below.
R, C, and L Elements and their v and i relationships We deal with three essential elements in circuit analysis: Resistance R Capacitance C Inductance L Their v and i relationships are summarized below.
Some of the different forms of a signal, obtained by transformations, are shown in the figure. jwt e z. jwt z e
 Transform methods Some of the different forms of a signal, obtained by transformations, are shown in the figure. X(s) X(t) L - L F - F jw s s jw X(jw) X*(t) F - F X*(jw) jwt e z jwt z e X(nT) Z - Z X(z)
Transform methods Some of the different forms of a signal, obtained by transformations, are shown in the figure. X(s) X(t) L - L F - F jw s s jw X(jw) X*(t) F - F X*(jw) jwt e z jwt z e X(nT) Z - Z X(z)