Swarm-bots and Swarmanoid: Two experiments in embodied swarm intelligence
|
|
|
- Justin Jennings
- 6 years ago
- Views:
Transcription
1 Swarm-bots and Swarmanoid: Two experiments in embodied swarm intelligence Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles IAT Milano, Italy

2 What is swarm intelligence? Swarm intelligence: Any attempt to design algorithms or distributed problem-solving devices inspired by the collective behavior of social insect colonies and other animal societies From Bonabeau E., M. Dorigo & G. Theraulaz, Swarm Intelligence: From Natural to Artificial Systems, Oxford University Press, Oxford University Press, 1999, page 7. 2
3 What is swarm intelligence? Swarm intelligence is an artificial intelligence technique based around the study of collective behavior in decentralized, self-organized systems Swarm intelligence systems are typically made up of a population of simple agents interacting locally with one another and with their environment Although there is normally no centralized control structure dictating how individual agents should behave, local interactions between such agents often lead to the emergence of global behavior From Wikipedia, Swarm Intelligence 3
4 Research method Observe a social behavior Build a simple model to explain it Use the model of the social behavior as a source of inspiration for solving a practical problem that has some similarities with the observed social behavior ] biologists 4
5 Research method Observe a social behavior Build a simple model to explain it Use the model of the social behavior as a source of inspiration for solving a practical problem that has some similarities with the observed social behavior ] Computer scientists, engineers, operation researchers, roboticists 5
6 Swarm intelligence Distinguish between Scientific swarm intelligence is concerned with the understanding of natural swarm systems, and Engineering swarm intelligence is concerned with the design and implementation of artificial swarm systems 6
7 Swarm intelligence Engineering swarm intelligence takes inspiration from scientific swarm intelligence studies to design problem-solving devices 7

8 Example I: Ants find the shortest path Multi-agent Individuals use only local information Distributed control Video by J.L. Deneubourg 8

9 Example II: Ants preform cooperative transport Multi-agent Individuals use only local information Distributed control Video by J.L. Deneubourg 9

10 Example III: Ants self-assemble to build a bridge Multi-agent Individuals use only local information Distributed control Video by A. Lioni 10
11 From scientific to engineering swarm intelligence Foraging ant colony optimization (routing, combinatorial optimization) Division of labor Cemetery organization and brood sorting Self-assembly and cooperative transport Flashing synchronization adaptive task allocation data clustering self-assembly and cooperative transport in a robotic system fault detection in a robotic system 11

12 Example application: Swarm robotics and the swarm-bot experiment 12
13 What is swarm robotics? It is research in collective robotics: that is relevant for the control and coordination of large numbers of robots in which robots are relatively simple and incapable, so that the tasks they tackle require cooperation in which the robots have only local and limited sensing and communication abilities 13
14 Motivations We aim at building systems that have some desirable characteristics: Fault tolerance: When a robot breaks down another one can take over. No single point-of-failure Parallelism: Different robots can perform different task at the same time Scalability: Add more robots, get more work done Low cost: Simple robots are cheaper to build than complex robots 14
15 The swarm-bot experiment What is a swarm-bot? A swarm-bot is an artifact composed of a number of simpler robots, called s-bots, capable of self-assembling and selforganizing to adapt to its environment S-bots can connect to and disconnect from each other to self-assemble and form structures when needed, and disband at will 15


16 Example: An experimental scenario Find object and aggregate around it Pull object and search for goal Change shape and move in a coordinate way avoiding obstacles 16






17 Swarm-bots Hardware: the s-bot mechanics ~ 700 grams 10 cm Approximately 100 parts 10 cm Turret Treels 12 cm Electronic core Main body Base

18 Swarm-bots Hardware: the s-bot electronics

19 19 Swarm-bots The s-bot
20 Swarm-bots Controllers development: methodology Develop a simulation model of the hardware Define the basic behaviors to be developed Use either hand-coded behavior-based architectures or artificial evolution of simple neural networks to synthesize the basic behaviors in simulation that can be ported to the real s-bots Download and test the obtained controllers on the real s-bots 20


21 21 Swarm-bots Simulation model

22 Swarm-bots Different levels of detail detailed medium simple 22

23 Swarm-bots Basic behaviors for the scenario Coordinated motion Self-assembly Cooperative transport Goal search and path formation 23

24 Swarm-bots Coordinated motion Four s-bots are connected in a swarm-bot formation Their chassis are randomly oriented The s-bots should be able to collectively choose a direction of motion move as far as possible Simple perceptrons are evolved as controllers 24

25 Swarm-bots: Coordinated motion The traction sensor Connected s-bots apply pulling/pushing forces to each other when moving Each s-bot can measure a traction force acting on its turret/chassis connection The traction force indicates the mismatch between the average direction of motion of the group the desired direction of motion of the single s-bot turret traction sensor 25
26 Swarm-bots: Coordinated motion The evolutionary algorithm Binary encoded genotype 8 bits per real valued parameter of the neural controllers Generational evolutionary algorithm 100 individuals evolved for 100 generations 20 best individuals are allowed to reproduce in each generation Mutation (3% per bit) is applied to the offspring The perceptron is cloned and downloaded on each s-bot Fitness is evaluated looking at the swarm-bots performance Each individual is evaluated with equal starting conditions 26
27 Swarm-bots: Coordinated motion Fitness evaluation The fitness F of a genotype is given by the distance covered by the group: where X(t) is the coordinate vector of the center of mass at time t, and D is the maximum distance that can be covered in 150 simulation cycles Fitness is evaluated 5 times, starting from different random initializations The resulting average is assigned to the genotype 27
28 Swarm-bots: Coordinated motion Results Average fitness Post-evaluation Replication Performance

29 Swarm-bots: Coordinated motion Porting to real s-bots 29



30 Swarm-bots: Coordinated motion Real s-bots flexibility 30



31 Swarm-bots Self-assembly



32 Swarm-bots: Self-assembly Self-assembling s-bots flexibility flexibility 32 scalability

33 Swarm-bots Cooperative transport Goal: Let a swarm-bot transport an object to a goal location Control Designed phototaxis behavior Neural net for blind s-bots 33

34 Swarm-bots: Cooperative transport Self-assembly and transport 34
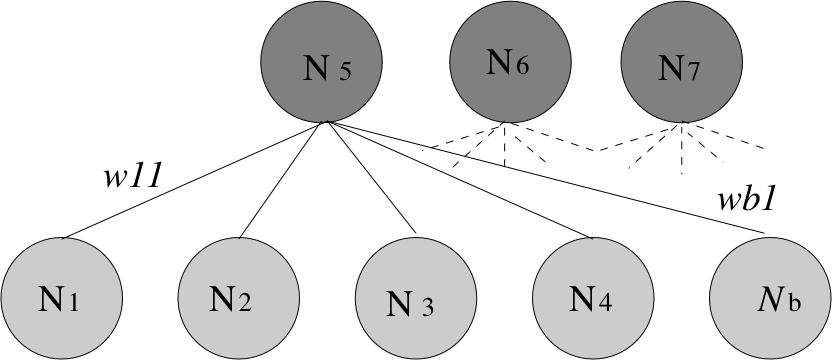
35 Swarm-bots Path formation Our robots have limited sensing capabilities: Can distinguish 3 colors (approx up to 30 cm away) Can say which color is closer We want to mimic ants trail formation, but s-bots cannot lay pheromones We use s-bots instead of pheromones 35
36 Swarm-bots: Path formation The algorithm Object Goal 36
37 Swarm-bots: Path formation The algorithm Object Goal 37

38 Swarm-bots: Path formation Path formation and retrieval 38

39 Swarm-bots: Path formation Path formation and retrieval 5 x 39
40 Swarm-bots Ongoing work Functional self-assembly Morphology formation Swarm level fault detection 40

41 Swarm-bots: Ongoing work Functional self-assembly 41

42 Swarm-bots: Ongoing work Functional self-assembly S-bots can pass a low hill 42

43 Swarm-bots: Ongoing work Functional self-assembly 43 A single s-bot cannot pass a high hill

44 Swarm-bots: Ongoing work Functional self-assembly A swarm-bot composed of 3 s-bots can 44

45 Swarm-bots: Ongoing work Functional self-assembly 45

46 Swarm-bots: Ongoing work Morphology control 46
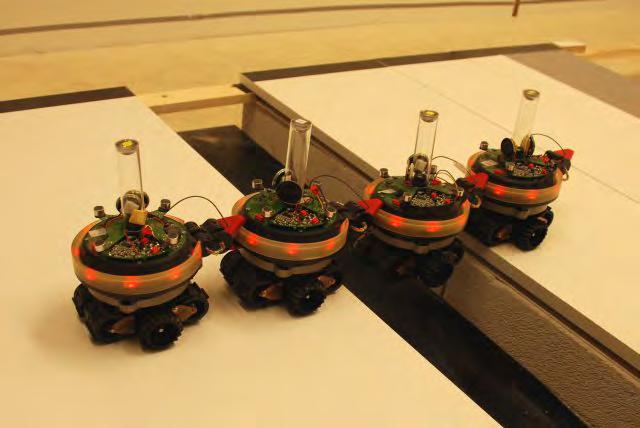
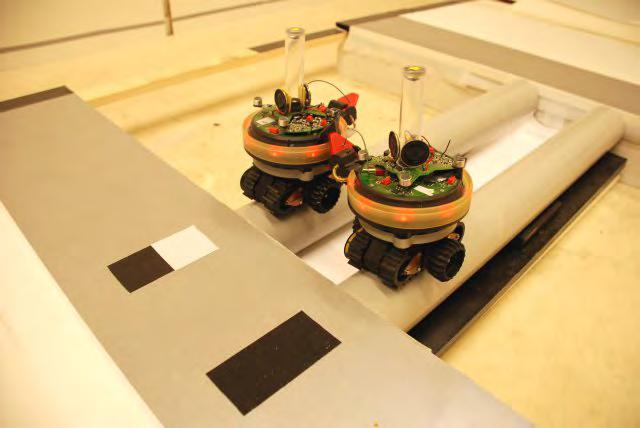
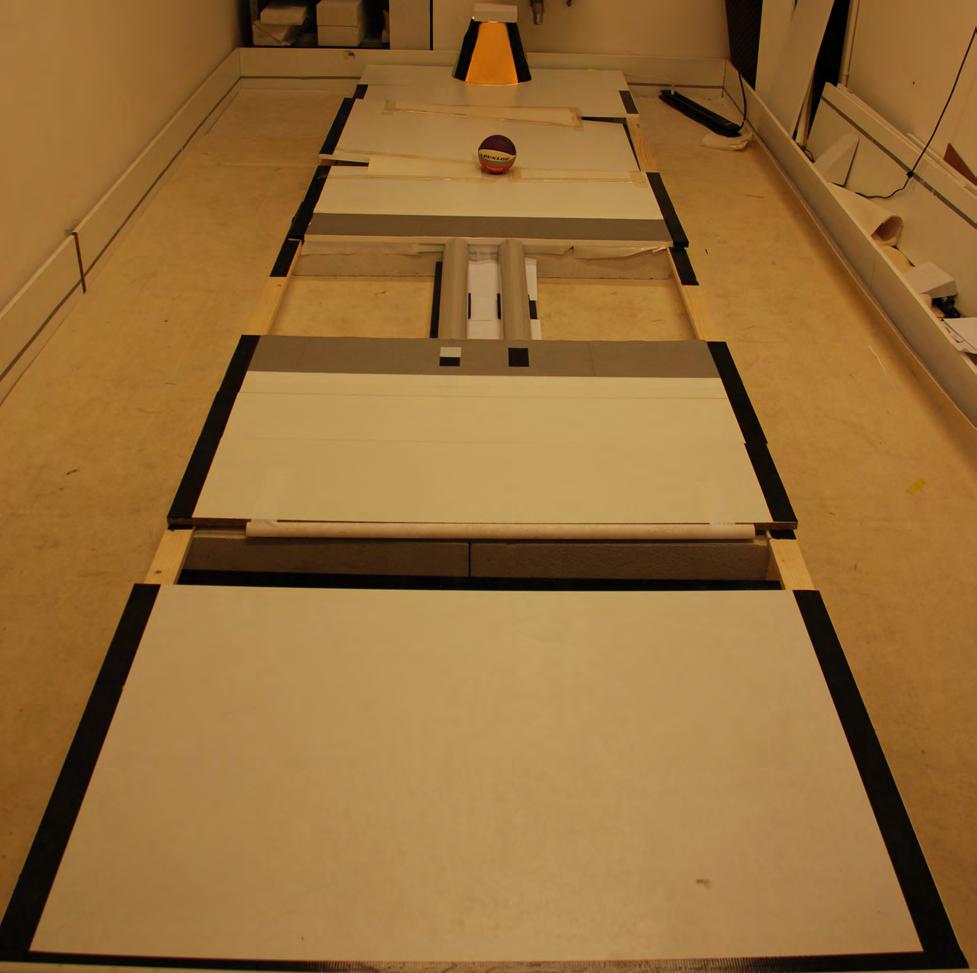
47 Example of application of morphology control A same robotic system has to solve different tasks Our experiment: 3 different tasks to be solved one after the other No a priori knowledge of task sequence Each task only solvable by dedicated morphology
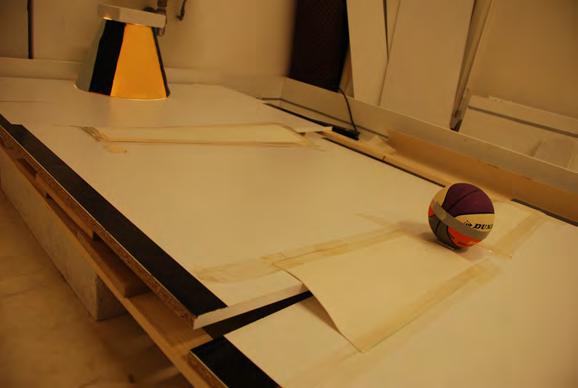
48 The tasks Cross narrow trough (22 cm) Cross wide trough using bridge Push ball on inclined plane

49 The tasks


50 The tasks

51 Task: Pass hole - Success

52 Task: Bridge - Failure

53 Task: Bridge - Success

54 Task: Push ball - Failure

55 Task: Push ball - Success

56 Simulation of the whole scenario 56
57 Swarm-bots The Swarm-bots project 57 More than 20 people for a duration of 42 months (ended officially on March 31, 2005) 2 Millions Euros funding Four labs involved: IRIDIA-ULB (Belgium: Dorigo and Deneubourg): Coordinator Main expertise: swarm intelligence EPFL (Switzerland: Floreano & Mondada): Main expertise: hardware and evolutionary robotics (Khepera people) IDSIA (Switzerland: Gambardella): Main expertise: simulation CNR (Italy: Nolfi): Main expertise: evolutionary robotics One subcontractor: METU, Ankara (Turkey: Sahin) Collaborated to the development of a parallel environment for simulations
58 The Swarmanoid project Builds on Swarm-bots experience Started on October 1st, 2006 (duration of 42 months) Funded with 2.5 Millions EUR (European Union Future and Emerging Technologies program) Same partners as Swarm-bots 58
59 Swarmanoid A swarmanoid is composed of: Eye-bots Hand-bots Foot-bots Goal: build heterogeneous swarms that act in 3D space 59

60 Scenario: A search and retrieval task 60

61 61 Eye-bot

62 62 Hand-bot



63 ANTS Conferences ANTS th International Conference on Swarm Intelligence September 8 10, 2010, Brussels 63 Marco Dorigo

64 Swarm Intelligence journal Swarm Intelligence started in 2007 and publishes four issues per year Editor-in-Chief: Marco Dorigo Publisher: Springer

65 The end
Swarm-bots. Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles
 Swarm-bots Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles Swarm-bots The swarm-bot is an experiment in swarm robotics Swarm robotics is the application of swarm intelligence principles
Swarm-bots Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles Swarm-bots The swarm-bot is an experiment in swarm robotics Swarm robotics is the application of swarm intelligence principles
Cooperative Transport of Objects of Different Shapes and Sizes
 Cooperative Transport of Objects of Different Shapes and Sizes Roderich Groß and Marco Dorigo IRIDIA - Université Libre de Bruxelles - Brussels, Belgium {rgross,mdorigo}@ulb.ac.be Abstract. This paper
Cooperative Transport of Objects of Different Shapes and Sizes Roderich Groß and Marco Dorigo IRIDIA - Université Libre de Bruxelles - Brussels, Belgium {rgross,mdorigo}@ulb.ac.be Abstract. This paper
Evolving Aggregation Behaviors in a Swarm of Robots
 Evolving Aggregation Behaviors in a Swarm of Robots Vito Trianni 1, Roderich Groß 1, Thomas H. Labella 1, Erol Şahin 2, and Marco Dorigo 1 1 IRIDIA Université Libre de Bruxelles, Belgium 2 Dept. of Computer
Evolving Aggregation Behaviors in a Swarm of Robots Vito Trianni 1, Roderich Groß 1, Thomas H. Labella 1, Erol Şahin 2, and Marco Dorigo 1 1 IRIDIA Université Libre de Bruxelles, Belgium 2 Dept. of Computer
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle elf-assembly on Demand in a Group of Physical Autonomous Mobile Robots Navigating
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle elf-assembly on Demand in a Group of Physical Autonomous Mobile Robots Navigating
Swarm Intelligence W13: From Aggregation and Segregation to Structure Building
 Swarm Intelligence W13: From Aggregation and Segregation to Structure Building Stigmergy Quantitative Qualitative Outline Distributed building in: natural systems artificial virtual systems artificial
Swarm Intelligence W13: From Aggregation and Segregation to Structure Building Stigmergy Quantitative Qualitative Outline Distributed building in: natural systems artificial virtual systems artificial
Introduction to Swarm Robotics
 COMP 4766 Introduction to Autonomous Robotics Introduction to Swarm Robotics By Andrew Vardy April 1, 2014 Outline 1 Initial Definitions 2 Examples of SI in Biology 3 Self-Organization 4 Stigmergy 5 Swarm
COMP 4766 Introduction to Autonomous Robotics Introduction to Swarm Robotics By Andrew Vardy April 1, 2014 Outline 1 Initial Definitions 2 Examples of SI in Biology 3 Self-Organization 4 Stigmergy 5 Swarm
Outline. 1 Initial Definitions. 2 Examples of SI in Biology. 3 Self-Organization. 4 Stigmergy. 5 Swarm Robotics
 Outline COMP 4766 Introduction to Autonomous Robotics 1 Initial Definitions Introduction to Swarm Robotics 2 Examples of SI in Biology 3 Self-Organization By Andrew Vardy 4 Stigmergy April 1, 2014 5 Swarm
Outline COMP 4766 Introduction to Autonomous Robotics 1 Initial Definitions Introduction to Swarm Robotics 2 Examples of SI in Biology 3 Self-Organization By Andrew Vardy 4 Stigmergy April 1, 2014 5 Swarm
Self-Assembly in Physical Autonomous Robots: the Evolutionary Robotics Approach
 Self-Assembly in Physical Autonomous Robots: the Evolutionary Robotics Approach Elio Tuci 1, Christos Ampatzis 1, Vito Trianni 2 Anders Lyhne Christensen 1, and Marco Dorigo 1 1 IRIDIA, CoDE, Université
Self-Assembly in Physical Autonomous Robots: the Evolutionary Robotics Approach Elio Tuci 1, Christos Ampatzis 1, Vito Trianni 2 Anders Lyhne Christensen 1, and Marco Dorigo 1 1 IRIDIA, CoDE, Université
Ant Algorithms. Ant Algorithms. Ant Algorithms. Ant Algorithms. G5BAIM Artificial Intelligence Methods. Finally. Ant Algorithms.
 G5BAIM Genetic Algorithms G5BAIM Artificial Intelligence Methods Dr. Rong Qu Finally.. So that s why we ve been getting pictures of ants all this time!!!! Guy Theraulaz Ants are practically blind but they
G5BAIM Genetic Algorithms G5BAIM Artificial Intelligence Methods Dr. Rong Qu Finally.. So that s why we ve been getting pictures of ants all this time!!!! Guy Theraulaz Ants are practically blind but they
Majority Rule with Differential Latency: An Absorbing Markov Chain to Model Consensus
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Majority Rule with Differential Latency: An Absorbing Markov Chain to Model Consensus
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Majority Rule with Differential Latency: An Absorbing Markov Chain to Model Consensus
Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce
 Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce Raffaele Bianco & Stefano Nolfi Institute of Cognitive Sciences and Technologies, CNR
Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce Raffaele Bianco & Stefano Nolfi Institute of Cognitive Sciences and Technologies, CNR
Capacitor Placement for Economical Electrical Systems using Ant Colony Search Algorithm
 Capacitor Placement for Economical Electrical Systems using Ant Colony Search Algorithm Bharat Solanki Abstract The optimal capacitor placement problem involves determination of the location, number, type
Capacitor Placement for Economical Electrical Systems using Ant Colony Search Algorithm Bharat Solanki Abstract The optimal capacitor placement problem involves determination of the location, number, type
An ant colony algorithm for multiple sequence alignment in bioinformatics
 An ant colony algorithm for multiple sequence alignment in bioinformatics Jonathan Moss and Colin G. Johnson Computing Laboratory University of Kent at Canterbury Canterbury, Kent, CT2 7NF, England. C.G.Johnson@ukc.ac.uk
An ant colony algorithm for multiple sequence alignment in bioinformatics Jonathan Moss and Colin G. Johnson Computing Laboratory University of Kent at Canterbury Canterbury, Kent, CT2 7NF, England. C.G.Johnson@ukc.ac.uk
Evolving Agent Swarms for Clustering and Sorting
 Evolving Agent Swarms for Clustering and Sorting Vegard Hartmann Complex Adaptive Organically-Inspired Systems Group (CAOS) Dept of Computer Science The Norwegian University of Science and Technology (NTNU)
Evolving Agent Swarms for Clustering and Sorting Vegard Hartmann Complex Adaptive Organically-Inspired Systems Group (CAOS) Dept of Computer Science The Norwegian University of Science and Technology (NTNU)
Available online at ScienceDirect. Procedia Computer Science 20 (2013 ) 90 95
 90 95") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 20 (2013 ) 90 95 Complex Adaptive Systems, Publication 3 Cihan H. Dagli, Editor in Chief Conference Organized by Missouri
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 20 (2013 ) 90 95 Complex Adaptive Systems, Publication 3 Cihan H. Dagli, Editor in Chief Conference Organized by Missouri
Evolution of Altruistic Robots
 Evolution of Altruistic Robots Dario Floreano 1, Sara Mitri 1, Andres Perez-Uribe 2, Laurent Keller 3 1 Laboratory of Intelligent Systems, EPFL, Lausanne, Switzerland 2 University of Applied Sciences,
Evolution of Altruistic Robots Dario Floreano 1, Sara Mitri 1, Andres Perez-Uribe 2, Laurent Keller 3 1 Laboratory of Intelligent Systems, EPFL, Lausanne, Switzerland 2 University of Applied Sciences,
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Supervised Group Size Regulation in a Heterogeneous Robotic Swarm Rehan O Grady
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Supervised Group Size Regulation in a Heterogeneous Robotic Swarm Rehan O Grady
depending only on local relations. All cells use the same updating rule, Time advances in discrete steps. All cells update synchronously.
 Swarm Intelligence Systems Cellular Automata Christian Jacob jacob@cpsc.ucalgary.ca Global Effects from Local Rules Department of Computer Science University of Calgary Cellular Automata One-dimensional
Swarm Intelligence Systems Cellular Automata Christian Jacob jacob@cpsc.ucalgary.ca Global Effects from Local Rules Department of Computer Science University of Calgary Cellular Automata One-dimensional
Swarm Intelligence Systems
 Swarm Intelligence Systems Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary Cellular Automata Global Effects from Local Rules Cellular Automata The CA space is
Swarm Intelligence Systems Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary Cellular Automata Global Effects from Local Rules Cellular Automata The CA space is
Sensitive Ant Model for Combinatorial Optimization
 Sensitive Ant Model for Combinatorial Optimization CAMELIA CHIRA cchira@cs.ubbcluj.ro D. DUMITRESCU ddumitr@cs.ubbcluj.ro CAMELIA-MIHAELA PINTEA cmpintea@cs.ubbcluj.ro Abstract: A combinatorial optimization
Sensitive Ant Model for Combinatorial Optimization CAMELIA CHIRA cchira@cs.ubbcluj.ro D. DUMITRESCU ddumitr@cs.ubbcluj.ro CAMELIA-MIHAELA PINTEA cmpintea@cs.ubbcluj.ro Abstract: A combinatorial optimization
biologically-inspired computing lecture 22 Informatics luis rocha 2015 INDIANA UNIVERSITY biologically Inspired computing
 lecture 22 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
lecture 22 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
OPTIMIZATION OF SWARM ROBOTIC SYSTEMS VIA MACROSCOPIC MODELS
 OPTIMIZATION OF SWARM ROBOTIC SYSTEMS VIA MACROSCOPIC MODELS Alcherio Martinoli Collective Robotics Group, California Institute of Technology 1200 E. California Blvd., M/C 136-93, Pasadena, CA, 91125-9300
OPTIMIZATION OF SWARM ROBOTIC SYSTEMS VIA MACROSCOPIC MODELS Alcherio Martinoli Collective Robotics Group, California Institute of Technology 1200 E. California Blvd., M/C 136-93, Pasadena, CA, 91125-9300
Evolving Specialisation in a Population of Heterogeneous Robots: the Challenge of Bootstrapping and Maintaining Genotypic Polymorphism
 Evolving Specialisation in a Population of Heterogeneous Robots: the Challenge of Bootstrapping and Maintaining Genotypic Polymorphism Arthur Bernard 1, Jean-Baptiste André 2 and Nicolas Bredeche 1 1 Sorbonne
Evolving Specialisation in a Population of Heterogeneous Robots: the Challenge of Bootstrapping and Maintaining Genotypic Polymorphism Arthur Bernard 1, Jean-Baptiste André 2 and Nicolas Bredeche 1 1 Sorbonne
Contact Information CS 420/527. Biologically-Inspired Computation. CS 420 vs. CS 527. Grading. Prerequisites. Textbook 1/11/12
 CS 420/527 Biologically-Inspired Computation Bruce MacLennan web.eecs.utk.edu/~mclennan/classes/420 Contact Information Instructor: Bruce MacLennan maclennan@eecs.utk.edu Min Kao 425 Office Hours: 3:30
CS 420/527 Biologically-Inspired Computation Bruce MacLennan web.eecs.utk.edu/~mclennan/classes/420 Contact Information Instructor: Bruce MacLennan maclennan@eecs.utk.edu Min Kao 425 Office Hours: 3:30
Templates. Template is a pattern used to construct another pattern Used in conjunction with sorting behaviour:
 Templates Template is a pattern used to construct another pattern Used in conjunction with sorting behaviour: Predictable behaviour Parametric Example: Define number and location of clusters Move to cluster,
Templates Template is a pattern used to construct another pattern Used in conjunction with sorting behaviour: Predictable behaviour Parametric Example: Define number and location of clusters Move to cluster,
Contact Information. CS 420/594 (Advanced Topics in Machine Intelligence) Biologically-Inspired Computation. Grading. CS 420 vs. CS 594.
 Biologically-Inspired Computation. Grading. CS 420 vs. CS 594.") CS 420/594 (Advanced Topics in Machine Intelligence) Biologically-Inspired Computation Bruce MacLennan http://www.cs.utk.edu/~mclennan/classes/420 Contact Information Instructor: Bruce MacLennan maclennan@eecs.utk.edu
CS 420/594 (Advanced Topics in Machine Intelligence) Biologically-Inspired Computation Bruce MacLennan http://www.cs.utk.edu/~mclennan/classes/420 Contact Information Instructor: Bruce MacLennan maclennan@eecs.utk.edu
Swarm and Evolutionary Computation. Evolving behavioral specialization in robot teams to solve a collective construction task
 Swarm and Evolutionary Computation 2 (2012) 25 38 Contents lists available at SciVerse ScienceDirect Swarm and Evolutionary Computation journal homepage: www.elsevier.com/locate/swevo Regular paper Evolving
Swarm and Evolutionary Computation 2 (2012) 25 38 Contents lists available at SciVerse ScienceDirect Swarm and Evolutionary Computation journal homepage: www.elsevier.com/locate/swevo Regular paper Evolving
ASGA: Improving the Ant System by Integration with Genetic Algorithms
 ASGA: Improving the Ant System by Integration with Genetic Algorithms Tony White, Bernard Pagurek, Franz Oppacher Systems and Computer Engineering, Carleton University, 25 Colonel By Drive, Ottawa, Ontario,
ASGA: Improving the Ant System by Integration with Genetic Algorithms Tony White, Bernard Pagurek, Franz Oppacher Systems and Computer Engineering, Carleton University, 25 Colonel By Drive, Ottawa, Ontario,
Towards Synthesizing Artificial Neural Networks that Exhibit Cooperative Intelligent Behavior: Some Open Issues in Artificial Life Michael G.
 Towards Synthesizing Artificial Neural Networks that Exhibit Cooperative Intelligent Behavior: Some Open Issues in Artificial Life Michael G. Dyer Computer Science Department, UCLA Overview Introduction
Towards Synthesizing Artificial Neural Networks that Exhibit Cooperative Intelligent Behavior: Some Open Issues in Artificial Life Michael G. Dyer Computer Science Department, UCLA Overview Introduction
Solving the Homogeneous Probabilistic Traveling Salesman Problem by the ACO Metaheuristic
 Solving the Homogeneous Probabilistic Traveling Salesman Problem by the ACO Metaheuristic Leonora Bianchi 1, Luca Maria Gambardella 1 and Marco Dorigo 2 1 IDSIA, Strada Cantonale Galleria 2, CH-6928 Manno,
Solving the Homogeneous Probabilistic Traveling Salesman Problem by the ACO Metaheuristic Leonora Bianchi 1, Luca Maria Gambardella 1 and Marco Dorigo 2 1 IDSIA, Strada Cantonale Galleria 2, CH-6928 Manno,
Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model
 Chapter -7 Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model 7.1 Summary Forecasting summer monsoon rainfall with
Chapter -7 Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model 7.1 Summary Forecasting summer monsoon rainfall with
Competitive Co-evolution
 Competitive Co-evolution Robert Lowe Motivations for studying Competitive co-evolution Evolve interesting behavioural strategies - fitness relative to opponent (zero sum game) Observe dynamics of evolving
Competitive Co-evolution Robert Lowe Motivations for studying Competitive co-evolution Evolve interesting behavioural strategies - fitness relative to opponent (zero sum game) Observe dynamics of evolving
Updating ACO Pheromones Using Stochastic Gradient Ascent and Cross-Entropy Methods
 Updating ACO Pheromones Using Stochastic Gradient Ascent and Cross-Entropy Methods Marco Dorigo 1, Mark Zlochin 2,, Nicolas Meuleau 3, and Mauro Birattari 4 1 IRIDIA, Université Libre de Bruxelles, Brussels,
Updating ACO Pheromones Using Stochastic Gradient Ascent and Cross-Entropy Methods Marco Dorigo 1, Mark Zlochin 2,, Nicolas Meuleau 3, and Mauro Birattari 4 1 IRIDIA, Université Libre de Bruxelles, Brussels,
Deterministic Nonlinear Modeling of Ant Algorithm with Logistic Multi-Agent System
 Deterministic Nonlinear Modeling of Ant Algorithm with Logistic Multi-Agent System Rodolphe Charrier, Christine Bourjot, François Charpillet To cite this version: Rodolphe Charrier, Christine Bourjot,
Deterministic Nonlinear Modeling of Ant Algorithm with Logistic Multi-Agent System Rodolphe Charrier, Christine Bourjot, François Charpillet To cite this version: Rodolphe Charrier, Christine Bourjot,
ARTIFICIAL INTELLIGENCE
 BABEŞ-BOLYAI UNIVERSITY Faculty of Computer Science and Mathematics ARTIFICIAL INTELLIGENCE Solving search problems Informed local search strategies Nature-inspired algorithms March, 2017 2 Topics A. Short
BABEŞ-BOLYAI UNIVERSITY Faculty of Computer Science and Mathematics ARTIFICIAL INTELLIGENCE Solving search problems Informed local search strategies Nature-inspired algorithms March, 2017 2 Topics A. Short
Stigmergy: a fundamental paradigm for digital ecosystems?
 Stigmergy: a fundamental paradigm for digital ecosystems? Francis Heylighen Evolution, Complexity and Cognition group Vrije Universiteit Brussel 1 Digital Ecosystem Complex, self-organizing system Agents:
Stigmergy: a fundamental paradigm for digital ecosystems? Francis Heylighen Evolution, Complexity and Cognition group Vrije Universiteit Brussel 1 Digital Ecosystem Complex, self-organizing system Agents:
ANT colony optimization (ACO) [2] is a metaheuristic inspired
![ANT colony optimization (ACO) [2] is a metaheuristic inspired](/thumbs/87/95229663.jpg "ANT colony optimization (ACO) [2] is a metaheuristic inspired") 732 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 11, NO. 6, DECEMBER 2007 On the Invariance of Ant Colony Optimization Mauro Birattari, Member, IEEE, Paola Pellegrini, and Marco Dorigo, Fellow,
732 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 11, NO. 6, DECEMBER 2007 On the Invariance of Ant Colony Optimization Mauro Birattari, Member, IEEE, Paola Pellegrini, and Marco Dorigo, Fellow,
Artificial Intelligence (AI) Common AI Methods. Training. Signals to Perceptrons. Artificial Neural Networks (ANN) Artificial Intelligence
 Common AI Methods. Training. Signals to Perceptrons. Artificial Neural Networks (ANN) Artificial Intelligence") Artificial Intelligence (AI) Artificial Intelligence AI is an attempt to reproduce intelligent reasoning using machines * * H. M. Cartwright, Applications of Artificial Intelligence in Chemistry, 1993,
Artificial Intelligence (AI) Artificial Intelligence AI is an attempt to reproduce intelligent reasoning using machines * * H. M. Cartwright, Applications of Artificial Intelligence in Chemistry, 1993,
Toward a Multi-Robot Coordination Formalism
 Toward a Multi-Robot Coordination Formalism Chris Jones and Maja J Matarić Computer Science Department University of Southern California, Los Angeles, CA 90089-0781, USA {cvjones maja}@robotics.usc.edu
Toward a Multi-Robot Coordination Formalism Chris Jones and Maja J Matarić Computer Science Department University of Southern California, Los Angeles, CA 90089-0781, USA {cvjones maja}@robotics.usc.edu
A general modeling framework for swarms
 Delft University of Technology Delft Center for Systems and Control Technical report 08-002 A general modeling framework for swarms J. van Ast, R. Babuška, and B. De Schutter If you want to cite this report,
Delft University of Technology Delft Center for Systems and Control Technical report 08-002 A general modeling framework for swarms J. van Ast, R. Babuška, and B. De Schutter If you want to cite this report,
biologically-inspired computing lecture 18
 Informatics -inspired lecture 18 Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays
Informatics -inspired lecture 18 Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays
Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model
 Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model Presented by Sayantika Goswami 1 Introduction Indian summer
Meta-heuristic ant colony optimization technique to forecast the amount of summer monsoon rainfall: skill comparison with Markov chain model Presented by Sayantika Goswami 1 Introduction Indian summer
Evolution of Solitary and Group Transport Behaviors for Autonomous Robots Capable of Self-Assembling
 Evolution of Solitary and Group Transport Behaviors for Autonomous Robots Capable of Self-Assembling Roderich Groß, 1,2 Marco Dorigo 2 1 ANT LAB, School of Biological Sciences, University of Bristol, UK
Evolution of Solitary and Group Transport Behaviors for Autonomous Robots Capable of Self-Assembling Roderich Groß, 1,2 Marco Dorigo 2 1 ANT LAB, School of Biological Sciences, University of Bristol, UK
SimAnt Simulation Using NEAT
 SimAnt Simulation Using NEAT Erin Gluck and Evelyn Wightman December 15, 2015 Abstract In nature, ants in a colony often work together to complete a common task. We want to see if we can simulate this
SimAnt Simulation Using NEAT Erin Gluck and Evelyn Wightman December 15, 2015 Abstract In nature, ants in a colony often work together to complete a common task. We want to see if we can simulate this
An Introduction to Swarm Robotics
 An Introduction to Swarm Robotics Alcherio Martinoli SNSF Professor in Computer and Communication Sciences, EPFL Part-Time Visiting Associate in Mechanical Engineering, CalTech Swarm-Intelligent Systems
An Introduction to Swarm Robotics Alcherio Martinoli SNSF Professor in Computer and Communication Sciences, EPFL Part-Time Visiting Associate in Mechanical Engineering, CalTech Swarm-Intelligent Systems
DRAFT VERSION: Simulation of Cooperative Control System Tasks using Hedonistic Multi-agents
 DRAFT VERSION: Simulation of Cooperative Control System Tasks using Hedonistic Multi-agents Michael Helm, Daniel Cooke, Klaus Becker, Larry Pyeatt, and Nelson Rushton Texas Tech University, Lubbock Texas
DRAFT VERSION: Simulation of Cooperative Control System Tasks using Hedonistic Multi-agents Michael Helm, Daniel Cooke, Klaus Becker, Larry Pyeatt, and Nelson Rushton Texas Tech University, Lubbock Texas
Traffic Signal Control with Swarm Intelligence
 009 Fifth International Conference on Natural Computation Traffic Signal Control with Swarm Intelligence David Renfrew, Xiao-Hua Yu Department of Electrical Engineering, California Polytechnic State University
009 Fifth International Conference on Natural Computation Traffic Signal Control with Swarm Intelligence David Renfrew, Xiao-Hua Yu Department of Electrical Engineering, California Polytechnic State University
Neural Systems and Artificial Life Group, Institute of Psychology, National Research Council, Rome. Evolving Modular Architectures for Neural Networks
 Neural Systems and Artificial Life Group, Institute of Psychology, National Research Council, Rome Evolving Modular Architectures for Neural Networks Andrea Di Ferdinando, Raffaele Calabretta and Domenico
Neural Systems and Artificial Life Group, Institute of Psychology, National Research Council, Rome Evolving Modular Architectures for Neural Networks Andrea Di Ferdinando, Raffaele Calabretta and Domenico
Intuitionistic Fuzzy Estimation of the Ant Methodology
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 9, No 2 Sofia 2009 Intuitionistic Fuzzy Estimation of the Ant Methodology S Fidanova, P Marinov Institute of Parallel Processing,
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 9, No 2 Sofia 2009 Intuitionistic Fuzzy Estimation of the Ant Methodology S Fidanova, P Marinov Institute of Parallel Processing,
Introduction. Spatial Multi-Agent Systems. The Need for a Theory
 Introduction Spatial Multi-Agent Systems A spatial multi-agent system is a decentralized system composed of numerous identically programmed agents that either form or are embedded in a geometric space.
Introduction Spatial Multi-Agent Systems A spatial multi-agent system is a decentralized system composed of numerous identically programmed agents that either form or are embedded in a geometric space.
Evolving Behavioral Specialization in Robot Teams to Solve a Collective Construction Task
 Evolving Behavioral Specialization in Robot Teams to Solve a Collective Construction Task G.S. Nitschke Computational Intelligence Research Group, Computer Science Department University of Pretoria, Pretoria,
Evolving Behavioral Specialization in Robot Teams to Solve a Collective Construction Task G.S. Nitschke Computational Intelligence Research Group, Computer Science Department University of Pretoria, Pretoria,
Models of Termite Nest Construction Daniel Ladley Computer Science 2003/2004
 Models of Termite Nest Construction Daniel Ladley Computer Science 2003/2004 The candidate confirms that the work submitted is their own and the appropriate credit has been given where reference has been
Models of Termite Nest Construction Daniel Ladley Computer Science 2003/2004 The candidate confirms that the work submitted is their own and the appropriate credit has been given where reference has been
Agent-Based Modeling Using Swarm Intelligence in Geographical Information Systems
 Agent-Based Modeling Using Swarm Intelligence in Geographical Information Systems Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp To cite this version: Rawan Ghnemat, Cyrille Bertelle, Gérard H.E.
Agent-Based Modeling Using Swarm Intelligence in Geographical Information Systems Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp To cite this version: Rawan Ghnemat, Cyrille Bertelle, Gérard H.E.
A Short Convergence Proof for a Class of Ant Colony Optimization Algorithms
 358 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 6, NO. 4, AUGUST 2002 A Short Convergence Proof for a Class of Ant Colony Optimization Algorithms Thomas Stützle and Marco Dorigo, Senior Member,
358 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 6, NO. 4, AUGUST 2002 A Short Convergence Proof for a Class of Ant Colony Optimization Algorithms Thomas Stützle and Marco Dorigo, Senior Member,
Ant Colony Optimization: an introduction. Daniel Chivilikhin
 Ant Colony Optimization: an introduction Daniel Chivilikhin 03.04.2013 Outline 1. Biological inspiration of ACO 2. Solving NP-hard combinatorial problems 3. The ACO metaheuristic 4. ACO for the Traveling
Ant Colony Optimization: an introduction Daniel Chivilikhin 03.04.2013 Outline 1. Biological inspiration of ACO 2. Solving NP-hard combinatorial problems 3. The ACO metaheuristic 4. ACO for the Traveling
Collective motion: from active matter to swarms in natural and engineered systems
 Collective motion: from active matter to swarms in natural and engineered systems Cristián Huepe Unaffiliated NSF Grantee: Cristian Huepe Labs Inc Chicago IL Supported by the National Science Foundation
Collective motion: from active matter to swarms in natural and engineered systems Cristián Huepe Unaffiliated NSF Grantee: Cristian Huepe Labs Inc Chicago IL Supported by the National Science Foundation
Co-evolving predator and prey robots: Do arms races arise in artificial evolution?
 Co-evolving predator and prey robots: Do arms races arise in artificial evolution? Stefano Nolfi * Dario Floreano ~ * Institute of Psychology, National Research Council Viale Marx 15, Roma, Italy stefano@kant.irmkant.rm.cnr.it
Co-evolving predator and prey robots: Do arms races arise in artificial evolution? Stefano Nolfi * Dario Floreano ~ * Institute of Psychology, National Research Council Viale Marx 15, Roma, Italy stefano@kant.irmkant.rm.cnr.it
Outline. Ant Colony Optimization. Outline. Swarm Intelligence DM812 METAHEURISTICS. 1. Ant Colony Optimization Context Inspiration from Nature
 DM812 METAHEURISTICS Outline Lecture 8 http://www.aco-metaheuristic.org/ 1. 2. 3. Marco Chiarandini Department of Mathematics and Computer Science University of Southern Denmark, Odense, Denmark
DM812 METAHEURISTICS Outline Lecture 8 http://www.aco-metaheuristic.org/ 1. 2. 3. Marco Chiarandini Department of Mathematics and Computer Science University of Southern Denmark, Odense, Denmark
Chapter 1 Introduction
 Chapter 1 Introduction 1.1 Introduction to Chapter This chapter starts by describing the problems addressed by the project. The aims and objectives of the research are outlined and novel ideas discovered
Chapter 1 Introduction 1.1 Introduction to Chapter This chapter starts by describing the problems addressed by the project. The aims and objectives of the research are outlined and novel ideas discovered
Mauro Birattari, Prasanna Balaprakash, and Marco Dorigo
 Chapter 10 THE ACO/F-RACE ALGORITHM FOR COMBINATORIAL OPTIMIZATION UNDER UNCERTAINTY Mauro Birattari, Prasanna Balaprakash, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Chapter 10 THE ACO/F-RACE ALGORITHM FOR COMBINATORIAL OPTIMIZATION UNDER UNCERTAINTY Mauro Birattari, Prasanna Balaprakash, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Computational Intelligence in Product-line Optimization
 Computational Intelligence in Product-line Optimization Simulations and Applications Peter Kurz peter.kurz@tns-global.com June 2017 Restricted use Restricted use Computational Intelligence in Product-line
Computational Intelligence in Product-line Optimization Simulations and Applications Peter Kurz peter.kurz@tns-global.com June 2017 Restricted use Restricted use Computational Intelligence in Product-line
Varying the Population Size of Artificial Foraging Swarms on Time Varying Landscapes
 Varying the Population Size of Artificial Foraging Swarms on Time Varying Landscapes Carlos Fernandes,3, Vitorino Ramos 2, Agostinho C. Rosa,4 LaSEEB-ISR-IST, Technical Univ. of Lisbon (IST), Av. Rovisco
Varying the Population Size of Artificial Foraging Swarms on Time Varying Landscapes Carlos Fernandes,3, Vitorino Ramos 2, Agostinho C. Rosa,4 LaSEEB-ISR-IST, Technical Univ. of Lisbon (IST), Av. Rovisco
M odeling and sim ula ting the forag ing system in multi2source groups w ith random d isturbances
 3 4 Vol. 3. 4 20088 CAA I Transactions on Intelligent System s Aug. 2008,, (,150001) :..... 2,,,. Starlogo,.,. : ;; ; Starlogo : TP18 : A: 167324785 (2008) 0420342207 M odeling and sim ula ting the forag
3 4 Vol. 3. 4 20088 CAA I Transactions on Intelligent System s Aug. 2008,, (,150001) :..... 2,,,. Starlogo,.,. : ;; ; Starlogo : TP18 : A: 167324785 (2008) 0420342207 M odeling and sim ula ting the forag
A Note on the Parameter of Evaporation in the Ant Colony Optimization Algorithm
 International Mathematical Forum, Vol. 6, 2011, no. 34, 1655-1659 A Note on the Parameter of Evaporation in the Ant Colony Optimization Algorithm Prasanna Kumar Department of Mathematics Birla Institute
International Mathematical Forum, Vol. 6, 2011, no. 34, 1655-1659 A Note on the Parameter of Evaporation in the Ant Colony Optimization Algorithm Prasanna Kumar Department of Mathematics Birla Institute
Self-Organization in Social Insects
 Self-Organization in Social Insects Kazuo Uyehara 5/04/2008 Self-organization is a process in which complex patterns or behaviors are produced without direction from an outside or supervising source. This
Self-Organization in Social Insects Kazuo Uyehara 5/04/2008 Self-organization is a process in which complex patterns or behaviors are produced without direction from an outside or supervising source. This
Situation. The XPS project. PSO publication pattern. Problem. Aims. Areas
 Situation The XPS project we are looking at a paradigm in its youth, full of potential and fertile with new ideas and new perspectives Researchers in many countries are experimenting with particle swarms
Situation The XPS project we are looking at a paradigm in its youth, full of potential and fertile with new ideas and new perspectives Researchers in many countries are experimenting with particle swarms
A Methodology to Evolve Cooperation in Pursuit Domain using Genetic Network Programming
 A Methodology to Evolve Cooperation in Pursuit Domain using Genetic Network Programming Armin Tavakoli Naeini A Thesis in The Department of Electrical and Computer Engineering (ECE) Presented in Partial
A Methodology to Evolve Cooperation in Pursuit Domain using Genetic Network Programming Armin Tavakoli Naeini A Thesis in The Department of Electrical and Computer Engineering (ECE) Presented in Partial
COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS
 COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS (HS-IDA-MD-02-004) Gunnar Búason Submitted by Gunnar Búason to the University of Skövde as a dissertation towards the degree of M.Sc. by examination and
COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS (HS-IDA-MD-02-004) Gunnar Búason Submitted by Gunnar Búason to the University of Skövde as a dissertation towards the degree of M.Sc. by examination and
Tuning Parameters across Mixed Dimensional Instances: A Performance Scalability Study of Sep-G-CMA-ES
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Tuning Parameters across Mixed Dimensional Instances: A Performance Scalability
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Tuning Parameters across Mixed Dimensional Instances: A Performance Scalability
Artificial Intelligence Methods (G5BAIM) - Examination
 - Examination") Question 1 a) According to John Koza there are five stages when planning to solve a problem using a genetic program. What are they? Give a short description of each. (b) How could you cope with division
Question 1 a) According to John Koza there are five stages when planning to solve a problem using a genetic program. What are they? Give a short description of each. (b) How could you cope with division
Mein Semester-Studium an der Ottovon-Guericke
 Mein Semester-Studium an der Ottovon-Guericke Universität in 2014-2015. Wie läuft das Studiumprozess? Scoring system in OvGU vs BSU Possible forms of examinations Advices for successful graduation Combinatorial
Mein Semester-Studium an der Ottovon-Guericke Universität in 2014-2015. Wie läuft das Studiumprozess? Scoring system in OvGU vs BSU Possible forms of examinations Advices for successful graduation Combinatorial
Evolutionary Design I
 Evolutionary Design I Jason Noble jasonn@comp.leeds.ac.uk Biosystems group, School of Computing Evolutionary Design I p.1/29 This lecture Harnessing evolution in a computer program How to construct a genetic
Evolutionary Design I Jason Noble jasonn@comp.leeds.ac.uk Biosystems group, School of Computing Evolutionary Design I p.1/29 This lecture Harnessing evolution in a computer program How to construct a genetic
SC741 W12: Division of Labor Part I: Fixed- and Variable- Threshold Algorithms
 SC741 W12: Division of Labor Part I: Fixed- and Variable- Threshold Algorithms Outline Division of labor in natural systems Ants Bees, wasps Models and mechanisms Fixed-threshold mechanisms Variable-threshold
SC741 W12: Division of Labor Part I: Fixed- and Variable- Threshold Algorithms Outline Division of labor in natural systems Ants Bees, wasps Models and mechanisms Fixed-threshold mechanisms Variable-threshold
Neuro-Evolution for Emergent Specialization in Collective Behavior Systems
 1 VRIJE UNIVERSITEIT Neuro-Evolution for Emergent Specialization in Collective Behavior Systems ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad Doctor aan de Vrije Universiteit Amsterdam, op gezag
1 VRIJE UNIVERSITEIT Neuro-Evolution for Emergent Specialization in Collective Behavior Systems ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad Doctor aan de Vrije Universiteit Amsterdam, op gezag
From Local to Global Behavior in Intelligent Self-Assembly
 From Local to Global Behavior in Intelligent Self-Assembly Chris Jones and Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
From Local to Global Behavior in Intelligent Self-Assembly Chris Jones and Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
Division of Labour and Task Allocation
 Division of Labour and Task Allocation Introduction Many species of insects have division of labour Task allocation at colony level linked to elasticity of individuals Model is based upon response thresholds
Division of Labour and Task Allocation Introduction Many species of insects have division of labour Task allocation at colony level linked to elasticity of individuals Model is based upon response thresholds
Optimal Traffic Organisation in Ants under Crowded Conditions.
 Optimal Traffic Organisation in Ants under Crowded Conditions. Audrey Dussutour *, Vincent Fourcassié *, Dirk Helbing #, Jean-Louis Deneubourg * Centre de Recherches sur la Cognition Animale, UMR CNRS
Optimal Traffic Organisation in Ants under Crowded Conditions. Audrey Dussutour *, Vincent Fourcassié *, Dirk Helbing #, Jean-Louis Deneubourg * Centre de Recherches sur la Cognition Animale, UMR CNRS
Latency time and absence of group effect: two examples
 Latency time and absence of group effect: two examples Jean-Louis Deneubourg 1, Eric Bonabeau 2, Guy Theraulaz 3 (1) Unit of Theoretical Behavioral Ecology, Service de Chimie-Physique, CP 231, Université
Latency time and absence of group effect: two examples Jean-Louis Deneubourg 1, Eric Bonabeau 2, Guy Theraulaz 3 (1) Unit of Theoretical Behavioral Ecology, Service de Chimie-Physique, CP 231, Université
Evolutionary Computation. DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia)
") Evolutionary Computation DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia) andrea.roli@unibo.it Evolutionary Computation Inspiring principle: theory of natural selection Species face
Evolutionary Computation DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia) andrea.roli@unibo.it Evolutionary Computation Inspiring principle: theory of natural selection Species face
The Best-of-n Problem in Robot Swarms
 UNIVERSITÉ LIBRE DE BRUXELLES École Polytechnique de Bruxelles IRIDIA Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle The Best-of-n Problem in Robot Swarms
UNIVERSITÉ LIBRE DE BRUXELLES École Polytechnique de Bruxelles IRIDIA Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle The Best-of-n Problem in Robot Swarms
Evolutionary computation
 Evolutionary computation Andrea Roli andrea.roli@unibo.it Dept. of Computer Science and Engineering (DISI) Campus of Cesena Alma Mater Studiorum Università di Bologna Outline 1 Basic principles 2 Genetic
Evolutionary computation Andrea Roli andrea.roli@unibo.it Dept. of Computer Science and Engineering (DISI) Campus of Cesena Alma Mater Studiorum Università di Bologna Outline 1 Basic principles 2 Genetic
Femtosecond Quantum Control for Quantum Computing and Quantum Networks. Caroline Gollub
 Femtosecond Quantum Control for Quantum Computing and Quantum Networks Caroline Gollub Outline Quantum Control Quantum Computing with Vibrational Qubits Concept & IR gates Raman Quantum Computing Control
Femtosecond Quantum Control for Quantum Computing and Quantum Networks Caroline Gollub Outline Quantum Control Quantum Computing with Vibrational Qubits Concept & IR gates Raman Quantum Computing Control
Co-evolutionary dynamics on a deformable landscape
 Co-evolutionary dynamics on a deformable landscape Marc Ebner Universität Würzburg Lehrstuhl für Informatik II Am Hubland 97074 Würzburg, Germany ebner@informatik.uniwuerzburg.de Richard A. Watson Brandeis
Co-evolutionary dynamics on a deformable landscape Marc Ebner Universität Würzburg Lehrstuhl für Informatik II Am Hubland 97074 Würzburg, Germany ebner@informatik.uniwuerzburg.de Richard A. Watson Brandeis
Tennis player segmentation for semantic behavior analysis
 Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
Ant Foraging Revisited
 Ant Foraging Revisited Liviu A. Panait and Sean Luke George Mason University, Fairfax, VA 22030 lpanait@cs.gmu.edu, sean@cs.gmu.edu Abstract Most previous artificial ant foraging algorithms have to date
Ant Foraging Revisited Liviu A. Panait and Sean Luke George Mason University, Fairfax, VA 22030 lpanait@cs.gmu.edu, sean@cs.gmu.edu Abstract Most previous artificial ant foraging algorithms have to date
Self-repairing and Mobility of a Simple Cell Model
 Self-repairing and Mobility of a Simple Cell Model Keisuke Suzuki and Takashi Ikegami General Systems Sciences, The Graduate School of Arts and Sciences, The University of Tokyo, 3-8-1 Komaba, Tokyo, 153-8902,
Self-repairing and Mobility of a Simple Cell Model Keisuke Suzuki and Takashi Ikegami General Systems Sciences, The Graduate School of Arts and Sciences, The University of Tokyo, 3-8-1 Komaba, Tokyo, 153-8902,
The Agent-Based Model and Simulation of Sexual Selection and Pair Formation Mechanisms
 entropy Article The Agent-Based Model and Simulation of Sexual Selection and Pair Formation Mechanisms Rafał Dreżewski ID AGH University of Science and Technology, Department of Computer Science, -59 Cracow,
entropy Article The Agent-Based Model and Simulation of Sexual Selection and Pair Formation Mechanisms Rafał Dreżewski ID AGH University of Science and Technology, Department of Computer Science, -59 Cracow,
Engineering Self-Organization and Emergence: issues and directions
 5/0/ Engineering Self-Organization and Emergence: issues and directions Franco Zambonelli franco.zambonelli@unimore.it Agents and Pervasive Computing Group Università di Modena e Reggio Emilia SOAS 005
5/0/ Engineering Self-Organization and Emergence: issues and directions Franco Zambonelli franco.zambonelli@unimore.it Agents and Pervasive Computing Group Università di Modena e Reggio Emilia SOAS 005
Evolutionary computation
 Evolutionary computation Andrea Roli andrea.roli@unibo.it DEIS Alma Mater Studiorum Università di Bologna Evolutionary computation p. 1 Evolutionary Computation Evolutionary computation p. 2 Evolutionary
Evolutionary computation Andrea Roli andrea.roli@unibo.it DEIS Alma Mater Studiorum Università di Bologna Evolutionary computation p. 1 Evolutionary Computation Evolutionary computation p. 2 Evolutionary
Swarm intelligence: Ant Colony Optimisation
 Swarm intelligence: Ant Colony Optimisation S Luz luzs@cs.tcd.ie October 7, 2014 Simulating problem solving? Can simulation be used to improve distributed (agent-based) problem solving algorithms? Yes:
Swarm intelligence: Ant Colony Optimisation S Luz luzs@cs.tcd.ie October 7, 2014 Simulating problem solving? Can simulation be used to improve distributed (agent-based) problem solving algorithms? Yes:
An Effective Chromosome Representation for Evolving Flexible Job Shop Schedules
 An Effective Chromosome Representation for Evolving Flexible Job Shop Schedules Joc Cing Tay and Djoko Wibowo Intelligent Systems Lab Nanyang Technological University asjctay@ntuedusg Abstract As the Flexible
An Effective Chromosome Representation for Evolving Flexible Job Shop Schedules Joc Cing Tay and Djoko Wibowo Intelligent Systems Lab Nanyang Technological University asjctay@ntuedusg Abstract As the Flexible
Swarm intelligence for urban dynamics modeling
 Swarm intelligence for urban dynamics modeling Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp To cite this version: Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp. Swarm intelligence for urban
Swarm intelligence for urban dynamics modeling Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp To cite this version: Rawan Ghnemat, Cyrille Bertelle, Gérard H.E. Duchamp. Swarm intelligence for urban
Mathematical Aspects of Self-Organized Dynamics
 October 30, 205 Mathematical Aspects of Self-Organized Dynamics Consensus, Emergence of Leaders, and Social Hydrodynamics By Eitan Tadmor Simulation of agent-based V icsek dynamics and the corresponding
October 30, 205 Mathematical Aspects of Self-Organized Dynamics Consensus, Emergence of Leaders, and Social Hydrodynamics By Eitan Tadmor Simulation of agent-based V icsek dynamics and the corresponding
Self-Organization and Collective Decision Making in Animal and Human Societies
 Self-Organization and Collective Decision Making... Frank Schweitzer SYSS Dresden 31 March 26 1 / 23 Self-Organization and Collective Decision Making in Animal and Human Societies Frank Schweitzer fschweitzer@ethz.ch
Self-Organization and Collective Decision Making... Frank Schweitzer SYSS Dresden 31 March 26 1 / 23 Self-Organization and Collective Decision Making in Animal and Human Societies Frank Schweitzer fschweitzer@ethz.ch
Swarm Robotics Final Report
 Swarm Robotics Final Report Anton Galkin 24779 Nano/Micro-Robotics Department of Mechanical Engineering Carnegie Mellon University Pittsburgh, PA 5289 Email: agalkin@andrew.cmu.edu Abstract his paper is
Swarm Robotics Final Report Anton Galkin 24779 Nano/Micro-Robotics Department of Mechanical Engineering Carnegie Mellon University Pittsburgh, PA 5289 Email: agalkin@andrew.cmu.edu Abstract his paper is
Self-Adaptive Ant Colony System for the Traveling Salesman Problem
 Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 Self-Adaptive Ant Colony System for the Traveling Salesman Problem Wei-jie Yu, Xiao-min
Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 Self-Adaptive Ant Colony System for the Traveling Salesman Problem Wei-jie Yu, Xiao-min
New approaches to evaporation in ant colony optimization algorithms
 New approaches to evaporation in ant colony optimization algorithms E. Foundas A. Vlachos Department of Informatics University of Piraeus Piraeus 85 34 Greece Abstract In Ant Colony Algorithms (ACA), artificial
New approaches to evaporation in ant colony optimization algorithms E. Foundas A. Vlachos Department of Informatics University of Piraeus Piraeus 85 34 Greece Abstract In Ant Colony Algorithms (ACA), artificial
Mapping Lessons from Ants to Free Flight An Ant-based Weather Avoidance Algorithm in Free Flight Airspace
 Mapping Lessons from Ants to Free Flight An Ant-based Weather Avoidance Algorithm in Free Flight Airspace Sameer Alam 1, Hussein A. Abbass 1, Michael Barlow 1, and Peter Lindsay 2 1 Canberra Node of the
Mapping Lessons from Ants to Free Flight An Ant-based Weather Avoidance Algorithm in Free Flight Airspace Sameer Alam 1, Hussein A. Abbass 1, Michael Barlow 1, and Peter Lindsay 2 1 Canberra Node of the
Sorting Network Development Using Cellular Automata
 Sorting Network Development Using Cellular Automata Michal Bidlo, Zdenek Vasicek, and Karel Slany Brno University of Technology, Faculty of Information Technology Božetěchova 2, 61266 Brno, Czech republic
Sorting Network Development Using Cellular Automata Michal Bidlo, Zdenek Vasicek, and Karel Slany Brno University of Technology, Faculty of Information Technology Božetěchova 2, 61266 Brno, Czech republic
Emergence of Cooperation in Heterogeneous Structured Populations
 Emergence of Cooperation in Heterogeneous Structured Populations F. C. Santos 1, J. M. Pacheco 2,3 and Tom Lenaerts 1 1 IRIDIA, Université Libre de Bruxelles, Avenue Franklin Roosevelt 5, Bruxelles, Belgium
Emergence of Cooperation in Heterogeneous Structured Populations F. C. Santos 1, J. M. Pacheco 2,3 and Tom Lenaerts 1 1 IRIDIA, Université Libre de Bruxelles, Avenue Franklin Roosevelt 5, Bruxelles, Belgium